 電子發(fā)燒友App
電子發(fā)燒友App


| ? |
在任何通信網(wǎng)絡(luò)中同步技術(shù)都是基礎(chǔ),它作為時(shí)時(shí)不可缺失的相對(duì)獨(dú)立系統(tǒng)為所有通信元素提供基本保證。而以時(shí)分復(fù)用為基礎(chǔ)的TD-SCDMA系統(tǒng),除了傳承現(xiàn)有通信網(wǎng)絡(luò)的同步技術(shù)外,在無線接口的同步技術(shù)上有著更大的要求,文章將就此進(jìn)行討論,并對(duì)TD系統(tǒng)的下行鏈路同步技術(shù)作進(jìn)一步的分析。 一、TD-SCDMA系統(tǒng)的同步技術(shù) UTRAN中涉及到的同步問題主要包含網(wǎng)絡(luò)同步、節(jié)點(diǎn)同步、傳輸信道同步、無線接口同步、Iu接口時(shí)間校正、上行同步等幾個(gè)方面。圖1給出了除網(wǎng)絡(luò)同步以外各種同步問題的參考模型。 1.網(wǎng)絡(luò)同步 網(wǎng)絡(luò)同步選擇高穩(wěn)定度和高精度的時(shí)鐘作為網(wǎng)絡(luò)時(shí)間基準(zhǔn),以保證其中各網(wǎng)絡(luò)的時(shí)間穩(wěn)定,因此它是其他同步技術(shù)的基礎(chǔ)。 2.節(jié)點(diǎn)同步 節(jié)點(diǎn)同步用以估計(jì)和補(bǔ)償U(kuò)TRAN節(jié)點(diǎn)(即Node B)之間的定時(shí)誤差。節(jié)點(diǎn)同步分為兩種:一種是用以獲得RNC與各個(gè)Node B間的定時(shí)誤差的“RNC到Node B的節(jié)點(diǎn)同步”,另一種為用于TDD模式下補(bǔ)償Node B之間的定時(shí)誤差的“Node B間的節(jié)點(diǎn)同步”,目的均在于取得統(tǒng)一的定時(shí)參考。 圖1給出了TDD模式下Node B間節(jié)點(diǎn)同步的兩種方式:一種是通過標(biāo)準(zhǔn)同步端口獲得,此時(shí)Node B有標(biāo)準(zhǔn)的同步輸入/輸出接口,只要其中任一輸入接口連接到外部基準(zhǔn)時(shí)鐘上,其余Node B的同步口與之串聯(lián),就能獲得Node B的同步;另一種方式則是通過空中接口獲得,TD-SCDMA系統(tǒng)可以利用空中接口中的下行導(dǎo)頻時(shí)隙(DwPTS)獲得同步信號(hào)。
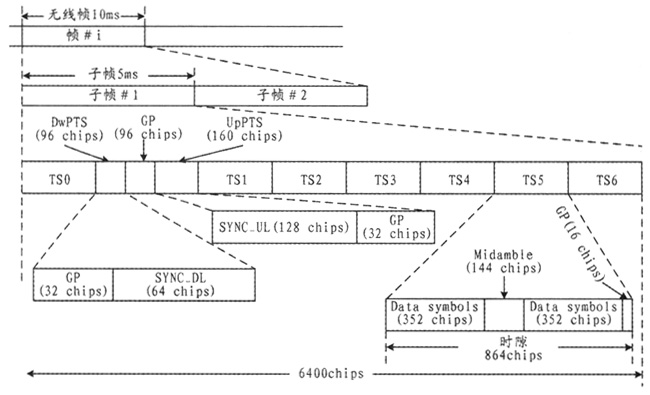
圖1 同步系統(tǒng)參考模型 3.傳輸信道同步 傳輸信道同步就是傳輸信道層實(shí)體之間的幀同步,使得在信道中所發(fā)射的參考信號(hào)(TS)的接收信號(hào)(S)都良好同步,以保證傳輸?shù)腝oS。 4.無線接口同步 無線接口同步是用戶設(shè)備(UE)與Node B之間空中接口的同步,這里的同步不僅包括時(shí)間上的同步,也涵蓋了頻率、碼字和廣播信道的同步,與之對(duì)應(yīng)的要求分別為:DwPTS同步、擾碼和基本中置碼的識(shí)別、控制復(fù)幀的同步以及讀取廣播信道。 5.Iu接口時(shí)間校正 Iu接口時(shí)間校正即時(shí)間調(diào)整控制處理,由于核心網(wǎng)(CN)中的多數(shù)處理均需同步,因此需要有一個(gè)緩沖器,一旦同步的定位幀丟失或同步時(shí)鐘出問題,就啟用備用時(shí)鐘,這時(shí)一些基于時(shí)間標(biāo)簽來排隊(duì)的緩沖器里的數(shù)據(jù)在備用時(shí)鐘啟用后就得到釋放,以繼續(xù)處理。 6.上行同步 同步CDMA系統(tǒng)中,要求來自不同位置、不同距離的不同終端的上行信號(hào)能夠同步到達(dá)基站。上行同步包括其建立和保持兩個(gè)過程,并以1/8碼片的最小精度進(jìn)行調(diào)整以保證上行信號(hào)的同步。由于各個(gè)用戶終端的信號(hào)碼片到達(dá)基站解調(diào)器的輸入輸出端時(shí)是同步的,且其充分應(yīng)用了擴(kuò)頻碼之間的正交性,降低了同一射頻信道中的多址干擾影響,從而系統(tǒng)容量隨之增加。這正是同步CDMA系統(tǒng)異于異步CDMA系統(tǒng)的優(yōu)越之處之一。 二、TD-SCDMA系統(tǒng)的下行同步 在移動(dòng)通信系統(tǒng)中,終端必須檢測(cè)基站發(fā)送的幀的結(jié)構(gòu),這個(gè)工作由同步過程完成,它包含在無線接口同步過程當(dāng)中。終端在上電之后,需要搜尋其周圍可能存在的小區(qū),并選擇合適的小區(qū)登錄,之后可以偵聽網(wǎng)絡(luò)上的尋呼或發(fā)起呼叫建立連接,以上過程則稱為小區(qū)初搜(ICS:Initial Cell Search)。 在GSM和WCDMA系統(tǒng)中,存在一個(gè)公共的同步碼,當(dāng)UE檢測(cè)到這個(gè)同步碼時(shí),就能與基站建立同步。而由于TD-SCDMA系統(tǒng)的特殊性,不存在類似的公共同步碼,而是32個(gè)相互正交的同步序列碼(SYNC_DL)。在該系統(tǒng)中,相鄰基站發(fā)送的同步碼是不相同的,最初的同步工作則是要正確檢測(cè)出同步序列碼,從而選擇合適的小區(qū)登錄。以下將就幾種初始幀同步算法做比較研究。 1.TD-SCDMA系統(tǒng)物理信道結(jié)構(gòu) TD-SCDMA系統(tǒng)物理信道結(jié)構(gòu)分為四層:系統(tǒng)幀、無線幀、子幀和時(shí)隙,如圖2所示。
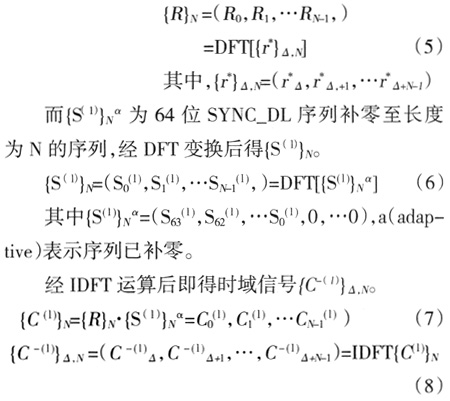
圖2 TD-SCDMA系統(tǒng)的幀結(jié)構(gòu) 由圖2可知,長(zhǎng)度為64 chip的下行同步碼(SYNC_DL)在每一個(gè)子幀中的位置確定,且每5 ms在下行鏈路數(shù)據(jù)中發(fā)送一次。要完成與Node B的同步,UE的首要任務(wù)就是正確解調(diào)出該同步碼,本節(jié)中將給出三類搜尋SYNC_DL的方法。 |
 摘要 首先對(duì)
摘要 首先對(duì)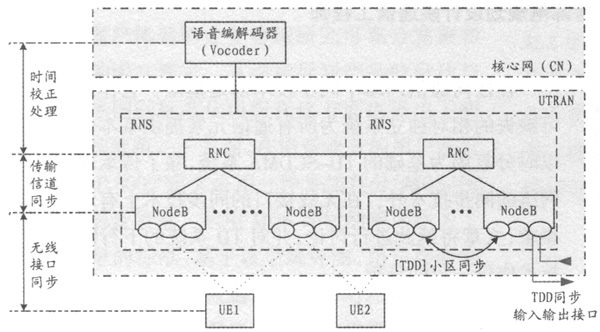
 ?
?(1)時(shí)域全搜索全比較法
時(shí)域中采用的這種相關(guān)法,即為標(biāo)準(zhǔn)的最大似然(ML:Maximum Lilehood)檢測(cè),其原理是UE以一個(gè)chip為步長(zhǎng),將收到的信號(hào)與所有可能的32個(gè)SYNC_DL做相關(guān)運(yùn)算,選取最大值所對(duì)應(yīng)的序列為SYNC_DL,如圖3所示。對(duì)于整個(gè)子幀6400 chip直接作搜尋則稱之為全搜索,而每多搜尋到一個(gè)chip便與32個(gè)SYNC_DL序列作比較,則稱之為全比較。
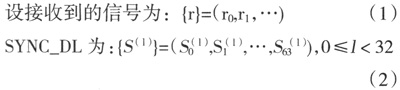
其中Si(1)是經(jīng)過QPSK調(diào)制的符號(hào),I為SYNC_DL的ID號(hào)。把接收到的信號(hào){r}{S(1)}做相關(guān)運(yùn)算,如圖3所示,得:

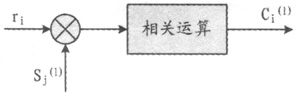
圖3 時(shí)域相關(guān)檢測(cè)
則相關(guān)計(jì)算后得到的MAX(Ci(1)對(duì)應(yīng)的信號(hào)序列為SYNC_DL:

(2)頻域全搜索全比較法
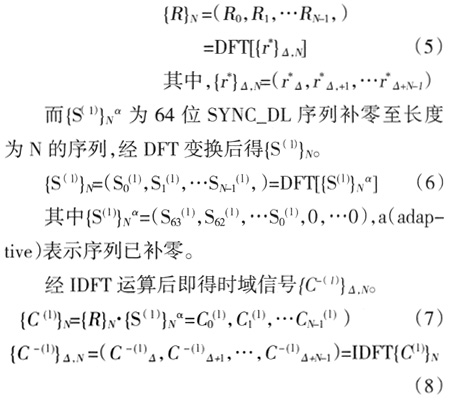
與時(shí)域相關(guān)法類似,不同的是在頻域算法中,先將信號(hào)ri經(jīng)DFT變換到頻域與SYNC_DL code(亦經(jīng)DFT變換至頻域)作相關(guān)運(yùn)算,再經(jīng)IDFT轉(zhuǎn)換回時(shí)域而得,如圖4所示。
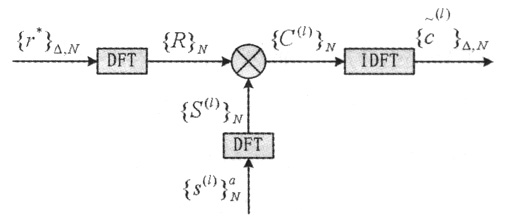
圖4 頻域檢測(cè)法
以長(zhǎng)度為N的檢測(cè)窗截取接收到的信號(hào)得{r*}△,M,經(jīng)DFT之后變換為{R}N,其中檢測(cè)窗的長(zhǎng)度N必須大于SYNC_DL序列的長(zhǎng)度64,一般取N=512,△為檢測(cè)窗的起始位置。
關(guān)于頻域搜索法還存在著一種改進(jìn)的方法,其主要原理為在DFT電路之后通過低通濾波器(Low Pass Filter)及低速率采樣電路(Sample Rate Reduction)來降低計(jì)算量。
3.特征窗搜尋法
(1)基本原理
由圖2可知,DwPTS中SYNC_DL的長(zhǎng)度為4個(gè)Symbol(SF=16),且以全功率發(fā)射,其前有3個(gè)Symbol的GP(其中包括DwPTS的2個(gè)Symbol的GP和TSO的1個(gè)Symbol的GP),而其后有6個(gè)Symbol的GP。GP期間,理論上應(yīng)該沒有信號(hào),實(shí)際應(yīng)用中雖然存在不可避免的干擾,其間的信號(hào)功率也是很小的。正是基于這個(gè)原理出現(xiàn)了特征窗搜尋法。
圖5給出了特征窗搜尋法的基本原理,它主要基于一定的匹配準(zhǔn)則來查找DwPTS。其原理是,移動(dòng)特征窗(窗長(zhǎng)為8個(gè)Symbol),計(jì)算窗中間的4個(gè)Symbol的功率和Pinner以及窗兩邊各2個(gè)Symbol的功率和Pside,并計(jì)算其比值P=Pside/Pinner,當(dāng)P為min(Pi)時(shí),即認(rèn)定該時(shí)刻特征窗的位置即為DwPTS。

圖5 特征窗搜尋法
(2)特征窗搜尋法的改進(jìn)
上述算法中,存在相繼的除法及比較單元,即要完成兩個(gè)除式的比較,此時(shí)會(huì)由于除法精度和算法復(fù)雜度等一系列問題使算法難度加大,但想到用乘法單元替代除法單元的方法可以大大降低搜尋算法的復(fù)雜度。在信噪比很高的情況下,噪聲部分的值本來就很小,那么原來采用的除法運(yùn)算會(huì)讓這個(gè)值變的更小,甚至超出定點(diǎn)算法的預(yù)算精度,導(dǎo)致無法得出正確的DwPTS位置,而乘法運(yùn)算就可以避免這個(gè)問題。
另外,由于CDMA是一個(gè)自干擾系統(tǒng),其他用戶或相鄰基站對(duì)UE的干擾影響較大,因此上述搜索算法容易產(chǎn)生將干擾搜索為DwPTS的誤判,那么UE不得不推遲與基站同步的時(shí)間,同時(shí)對(duì)UE的電力也有相當(dāng)大的損耗。為了提高特征窗搜索法的成功率,文獻(xiàn)[8]給出了更進(jìn)一步的改進(jìn)方法,引入平均功率判決法(MPD)。其核心思想是:首先計(jì)算一整個(gè)子幀周期(5 ms)內(nèi)的平均功率,然后再實(shí)施特征窗搜索法。如果在連續(xù)144個(gè)碼片內(nèi)Pinner≤MP,則判定該時(shí)刻特征窗搜索到的最小值不是DwPTS,從而進(jìn)一步降低了誤判概率。特征窗搜尋法改進(jìn)后的算法示意如圖6所示。

圖6 特征窗搜尋法的算法描述
4.基于幀結(jié)構(gòu)的搜尋法
從圖2的子幀結(jié)構(gòu)可以清楚看出在SYNC_DL的前后都有一定長(zhǎng)度的GP,理想條件下GP內(nèi)發(fā)射的信號(hào)為連續(xù)的邏輯“0”,而SYNC_DL序列則是不同的“0~1”序列,相關(guān)文獻(xiàn)基于這個(gè)基礎(chǔ)給出了另一種下行鏈路搜尋的方法。
由于SYNC_DL、SYNC_UL和中間碼(Midamble)不需擴(kuò)頻,也未經(jīng)加擾處理,因此可以直接取匹配濾波器的輸出信號(hào)進(jìn)行分析。其主要原理是:分別利用計(jì)數(shù)器對(duì)邏輯0與邏輯1計(jì)數(shù),當(dāng)連續(xù)收到96 chip的邏輯0時(shí),則可以確定該位置為SYNC_DL序列后的GP(本節(jié)中“GP”若無特殊標(biāo)注,即指代SYNC_DL與SYNC_UL之間GP),以此在下一子幀中找到SYNC_DL序列的位置,再對(duì)其做相關(guān)檢測(cè)即可得到SYNC_DL序列。
基于上述原理,筆者對(duì)算法進(jìn)行了改進(jìn),可以提高該搜尋法判別的準(zhǔn)確度,如圖7所示。同時(shí),在系統(tǒng)采用了UpPCH shifting方案之后,減小了UpPTS對(duì)GP的影響,可以進(jìn)一步提高該搜尋法的準(zhǔn)確性。
圖7 幀結(jié)構(gòu)搜尋法算法示意圖
其中有幾點(diǎn)需要說明的是:
(1)0_counter、1_counter均為計(jì)數(shù)器,分別記錄接收到邏輯0、邏輯1的個(gè)數(shù);M為計(jì)數(shù)器,記錄幀測(cè)次數(shù),即當(dāng)連續(xù)M幀相應(yīng)判斷正確時(shí),再做下一步判斷,依此提高系統(tǒng)搜尋到SYNC_DL序列位置的正確性并降低運(yùn)算量,一般M取3~5,本算法中M=3。
(2)由于TD-SCDMA系統(tǒng)的數(shù)據(jù)調(diào)制技術(shù)為QPSK方式,因此檢測(cè)接收信號(hào)發(fā)生誤碼的個(gè)數(shù)應(yīng)取偶數(shù)。一般系統(tǒng)的BER在10-3以上,因此允許96位GP中發(fā)生2位誤碼,即96位邏輯0中累計(jì)出現(xiàn)2個(gè)邏輯1。
(3)基于相應(yīng)誤碼率的允許程度,必須考慮到搜尋GP起始位置的提前量,即算法中的n chips,表1給出了32組不同SYNC_DL序列的最大提前chip數(shù)量。可以看出,當(dāng)系統(tǒng)不允許誤碼時(shí),GP起始位置允許的最大提前量為6 chip;而在允許誤碼的前提下,GP起始位置最大可提前12 chip,因此,算法中n應(yīng)取12。
(4)綜合考慮系統(tǒng)的UpPCH shifting方案以及算法的M次偵測(cè)法等相應(yīng)措施,無需再考慮GP位置的滯后量。
三、各種搜尋方法性能優(yōu)劣比較
以上給出了三種TD-SCDMA系統(tǒng)下行鏈路SYNC_DL同步序列搜索方法的原理及其各自的改進(jìn)方案,表2從算法復(fù)雜度、電路需求、功耗等方面比較了各搜尋方法的性能優(yōu)劣,同時(shí)筆者通過仿真試驗(yàn)給出了各方法的成功率和準(zhǔn)確性。
從表2可以清楚地看出各搜尋方法的性能優(yōu)劣,實(shí)際上相關(guān)搜尋法是所有方法的基礎(chǔ),時(shí)域、頻域的全搜索全比較法是在全局范圍內(nèi)作相關(guān)搜尋,因此計(jì)算量是相當(dāng)大的,但其一次性建立下行同步的準(zhǔn)確性是相當(dāng)高的,而特征窗搜尋法、幀結(jié)構(gòu)搜尋法均旨在提前將SYNC_DL的位置確定或縮小其范圍,隨后再作相關(guān)計(jì)算從而正確解調(diào)出SYNC_DL,在大大降低計(jì)算復(fù)雜度的同時(shí)提高了電路的復(fù)雜度,同時(shí)犧牲了一部分解調(diào)的成功率。我們旨在不斷尋找一種低復(fù)雜度高成功率的方法完成下行鏈路初搜過程,在現(xiàn)有的方法中不斷改進(jìn),進(jìn)一步提高UE同步到Node B的精確性。
參考文獻(xiàn)
1 3GPP TS 25.402(V7.2.0).Synchronization in UTRAN
2 3GPP TS 25.102(V7.5.0).User Equipment(UE)Radio Transmission and Reception(TDD)
3 3GPP TS 25.221(V7.1.0).Physical Channels and Mapping of Transport Channels onto Physical Channels(TDD)
4 3GPP TS 25.222(V7.1.0).Multiplexing and Channel Coding(TDD)
5 3GPP TS 25.223(V7.2.0).Spreading and Modulation(TDD)
6 3GPP TS 25.224(V7.1.0).Physical Layer Procedures(TDD)
7 黃繼中.一種降低小區(qū)初搜運(yùn)算量并提高運(yùn)算精度的方法及裝置.CN1553740A
8 TD-SCDMA下行引導(dǎo)時(shí)序搜尋算法研究.彭佛才等.通信技術(shù)總第140期
9 李世鶴.TD-SCDMA第三代移動(dòng)通信系統(tǒng)標(biāo)準(zhǔn).北京:人民郵電出版社,2003











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論