 電子發(fā)燒友App
電子發(fā)燒友App


無人駕駛汽車是一種智能汽車,也可以稱之為輪式移動機(jī)器人,主要依靠車內(nèi)的以計(jì)算機(jī)系統(tǒng)為主的智能駕駛儀來實(shí)現(xiàn)無人駕駛。無人駕駛汽車集自動控制、體系結(jié)構(gòu)、人工智能、視覺計(jì)算等眾多技術(shù)于一體,是計(jì)算機(jī)科學(xué)、模式識別和智能控制技術(shù)高度發(fā)展的產(chǎn)物,也是衡量一個(gè)國家科研實(shí)力和工業(yè)水平的一個(gè)重要標(biāo)志,在國防和國民經(jīng)濟(jì)領(lǐng)域具有廣闊的應(yīng)用前景。
從20世紀(jì)70年代開始,美國、英國、德國等發(fā)達(dá)國家開始進(jìn)行無人駕駛汽車的研究,目前在可行性和實(shí)用化方面都取得了突破性的進(jìn)展。我國從20世紀(jì)80年代開始進(jìn)行無人駕駛汽車的研究,國防科技大學(xué)在1992年成功研制出我國第一輛真正意義上的無人駕駛汽車。
2005年,首輛城市無人駕駛汽車在上海交通大學(xué)研制成功,該車有望于兩年之內(nèi)率先在上海世紀(jì)公園進(jìn)行示范運(yùn)營,并在2010年世博會上一展身手。到時(shí)游客只需在公園的入口處按下一個(gè)按鈕,一輛沒有司機(jī)的四座敞篷汽車就會從遠(yuǎn)處開過來緩緩?fù)O拢缓蟠钶d著乘客前往他們想去的景點(diǎn)。
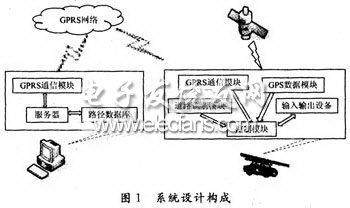
1 系統(tǒng)設(shè)計(jì)
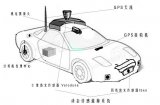
本系統(tǒng)主要由監(jiān)控中心和無人駕駛車輛終端構(gòu)成,如圖1所示,而無人駕駛車輛終端又包含GPS,GIS,GPRS等部分:
(1)GPS(Global Positioning System,全球定位系統(tǒng))是利用24顆人造衛(wèi)星組成的衛(wèi)星網(wǎng),可以向地球不斷發(fā)射定位及時(shí)間信號。地球上的任何一個(gè)GPS接收機(jī),只要接收到4顆以上的衛(wèi)星信號,經(jīng)過計(jì)算處理后就可報(bào)出GPS接收機(jī)的位置(經(jīng)度、緯度、高度)、時(shí)間和運(yùn)動狀態(tài)(速度、航向)。本系統(tǒng)采用GPS是為了使車輛在行駛過程中能夠準(zhǔn)確顯示自己的位置。
GPS導(dǎo)航系統(tǒng)的基本原理是測量出已知位置的衛(wèi)星到用戶接收機(jī)之間的距離,然后綜合多顆衛(wèi)星的數(shù)據(jù)就可知道接收機(jī)的具體位置。要達(dá)到這一目的,衛(wèi)星的位置可以根據(jù)星載時(shí)鐘所記錄的時(shí)間在衛(wèi)星星歷中查出。而用戶到衛(wèi)星的距離則通過紀(jì)錄衛(wèi)星信號傳播到用戶所經(jīng)歷的時(shí)間,再將其乘以光速得到(由于大氣層電離層的干擾,這一距離并不是用戶與衛(wèi)星之間的真實(shí)距離,而是偽距(PR):當(dāng)GPS衛(wèi)星正常工作時(shí),會不斷地用1和0二進(jìn)制碼元組成的偽隨機(jī)碼(簡稱偽碼)發(fā)射導(dǎo)航電文。GPS系統(tǒng)使用的偽碼一共有兩種,分別是民用的C/A碼和軍用的P(Y)碼。C/A碼頻率1.023MHz,重復(fù)周期一毫秒,碼間距1微秒,相當(dāng)于300m;P碼頻率10.23MHz,重復(fù)周期266.4天,碼間距0.1微秒,相當(dāng)于30m。而Y碼是在P碼的基礎(chǔ)上形成的,保密性能更佳。導(dǎo)航電文包括衛(wèi)星星歷、工作狀況、時(shí)鐘改正、電離層時(shí)延修正、大氣折射修正等信息。
(2)GIS(Geography Information System,地理信息系統(tǒng))GIS是以測繪測量為基礎(chǔ),以數(shù)據(jù)庫作為數(shù)據(jù)儲存和使用的數(shù)據(jù)源,以計(jì)算機(jī)編程為平臺的全球空間分析即時(shí)技術(shù)。這是GIS的本質(zhì),也是核心,是在計(jì)算機(jī)硬件、軟件系統(tǒng)支持下,對整個(gè)或部分地球表層空間的有關(guān)地理分布數(shù)據(jù)進(jìn)行采集、存儲、管理、運(yùn)算、分析和可視化表達(dá)的信息處理和管理系統(tǒng)。在本系統(tǒng)中,他與GPS模塊相結(jié)合,以地理空間數(shù)據(jù)為基礎(chǔ),在計(jì)算機(jī)系統(tǒng)中提供動態(tài)的電子地圖,可以實(shí)時(shí)將交通信息通過GIS界面友好地顯示給用戶。
(3)GPRS,通用分組無線服務(wù)技術(shù)(General Packet Radio Service)的簡稱,它是GSM移動電話用戶可用的一種移動數(shù)據(jù)業(yè)務(wù)。GPRS可說是GSM的延續(xù)。GPRS和以往連續(xù)在頻道傳輸?shù)姆绞讲煌且苑獍≒acket)式來傳輸,因此使用者所負(fù)擔(dān)的費(fèi)用是以其傳輸資料單位計(jì)算,并非使用其整個(gè)頻道,理論上較為便宜。GPRS的傳輸速率可提升至56甚至114Kbps,是在GSM((Global System)全球移動通信系統(tǒng)的網(wǎng)絡(luò)基礎(chǔ)上疊加的一個(gè)專業(yè)的高速數(shù)據(jù)通信網(wǎng)絡(luò),共用GSM頻率(900/1 800 MHz)。共享GSM網(wǎng)絡(luò)絕大部分基礎(chǔ)設(shè)施。可以接人基于TCP/IP的外部網(wǎng)絡(luò),具備了Internet所能提供的一切功能。本系統(tǒng)采用GPRS作為車載終端與監(jiān)控端無線通信橋梁,主要是考慮到他有資源利用率高、傳輸速率高、接人時(shí)間短、網(wǎng)絡(luò)覆蓋面廣等幾個(gè)優(yōu)勢。
(4)射頻識別讀卡器。射頻識別技術(shù)又稱電子標(biāo)簽、無線射頻識別,是一種通信技術(shù),可通過無線電訊號識別特定目標(biāo)并讀寫相關(guān)數(shù)據(jù),而無需識別系統(tǒng)與特定目標(biāo)之間建立機(jī)械或光學(xué)接觸,在交通系統(tǒng)一般用于高速公路站上不停車收費(fèi),車牌自動識別或者停車場定時(shí)收費(fèi)等。這些系統(tǒng)是將標(biāo)簽放置在車載終端上,在地面上安裝天線、射頻模塊和計(jì)算機(jī),利用射頻模塊中讀寫器來進(jìn)行一定范圍內(nèi)的射頻識別。射頻識別模塊通過裝有標(biāo)的車輛接近傳感器來判別是否有車輛通過。識別模塊在一定區(qū)域內(nèi)產(chǎn)生微波信號,當(dāng)車輛進(jìn)入該識別區(qū)域時(shí),就能激活標(biāo)簽。標(biāo)簽將數(shù)據(jù)反射給識別模塊,射頻讀寫器完成數(shù)據(jù)讀取。
2 車輛終端硬件構(gòu)成
車輛終端由GPS接收模塊、GPRS接收設(shè)備、主控制模強(qiáng)、讀卡器模塊、顯示模塊和輸入操作模塊構(gòu)成,系統(tǒng)框架如圖2所示。

(1)自主懸掛式獨(dú)軌車體上裝有嵌入式控制系統(tǒng),主要用于對整個(gè)車輛的控制以及各個(gè)模塊之間的調(diào)度。主控制模塊芯片采用了飛利浦公司生產(chǎn)的LPC2000 系列處理器,該系列產(chǎn)品是基于一個(gè)支持實(shí)時(shí)仿真和跟蹤的16/32位ARM7TDMI-STMCPU的微控制器,并帶有0/128/256kB嵌入的高速片內(nèi)FLASH存儲器。片內(nèi)128位寬度的存儲器接口和獨(dú)特的加速結(jié)構(gòu)使得32位代碼規(guī)模降低超過30%,而性能的損失卻很小。
通過在該系列處理器芯片的基礎(chǔ)上擴(kuò)展一系列完整的通用外圍器件,使系統(tǒng)硬件成本降到最低,并且根據(jù)設(shè)計(jì)需要再進(jìn)行裁減,就能為本車載系統(tǒng)提供一個(gè)低功耗、低成本、高性能的方案。
(2)該系統(tǒng)以GPRS無線傳輸方式與因特網(wǎng)保持連接,與軌道交通信息網(wǎng)站交換數(shù)據(jù)。本系統(tǒng)采用了BenQ公司生產(chǎn)的M22模塊,他符合ETSIGSM phase 2+標(biāo)準(zhǔn)和 AT指令集,支持GSM語音數(shù)據(jù)傳真短消息和GPRS數(shù)據(jù)傳輸。
(3)顯示模塊主要是用來顯示車輛行駛狀態(tài),包括地理信息位置,路徑采集情況等。本系統(tǒng)采用TFT6758液晶顯示模塊,工作電壓為3.3 V,內(nèi)帶白光LED背光燈。由于液晶模塊內(nèi)部包含了HD66781和HD66783液晶控制驅(qū)動,因此他可以直接使用8位、16位或者18位總線方式與控制器相連接。
(4)輸入模塊功能是通過按鈕查閱通過讀卡器接收到終端的路徑信息。
(5)GPS模塊用來對車輛進(jìn)行定位。本系統(tǒng)采用M12定位模塊,Motorola公司生產(chǎn)的導(dǎo)航設(shè)備,具有很低的功耗,支持RTCM (Radio Technical Commission forMaritime)格式的差分功能,采用NAEA0183格式輸出。該接收器在 汽車定位和調(diào)度系統(tǒng)中應(yīng)用廣泛。
3 終端軟件部分程序設(shè)計(jì)
本系統(tǒng)由于使用ARM7,ARM7是小型、快速、低能耗、集成式RISC內(nèi)核,用于移動通信ARM7系列處理器是英國ARM公司設(shè)計(jì)的主流嵌入式處理器 做主要控制器,考慮到資源的利用,采用μC/OS-Ⅱ來作為操作系統(tǒng)。μC/OS-Ⅱ是一個(gè)完整的、可移植、可固化、可剪裁的占先式實(shí)時(shí)多任務(wù)內(nèi)核。他用ANSI C語言編寫,包含一小部分匯編代碼,使之可以供不同架構(gòu)的微處理器使用。μC/OS-Ⅱ可以管理64個(gè)任務(wù),具有信號量、互斥信號量、事件標(biāo)志組、消息郵箱、消息隊(duì)列、任務(wù)管理、時(shí)間管理和內(nèi)存塊管理等功能。
μC/OS-Ⅱ軟件體系結(jié)構(gòu)有3部分:
(1)μC/OS-Ⅱ核心代碼:包括10個(gè)C程序文件和1個(gè)頭文件,主要實(shí)現(xiàn)系統(tǒng)調(diào)度、任務(wù)管理、內(nèi)存管理、信號量、消息郵箱和消息隊(duì)列等系統(tǒng)功能。此部分與處理器性能無關(guān)。
(2)μC/OS-Ⅱ配置代碼:包括兩個(gè)頭文件,用于裁減和配置μC/OS-Ⅱ。該部分與用戶實(shí)際應(yīng)用相關(guān)。
(3)μC/OS-Ⅱ移植代碼:包括1個(gè)匯編文件、1個(gè)C程序文件和1個(gè)頭文件,這是移植μC/OS-Ⅱ所需要的代碼,與處理器無關(guān)。
在本系統(tǒng)中首先要進(jìn)行系統(tǒng)移植,才能進(jìn)行程序的調(diào)用。移植滿足了以下要求:
(1)處理器的C編譯器能產(chǎn)生可重入型代碼;
(2)處理器支持中斷,并且能產(chǎn)生定時(shí)中斷(10~100 Hz);
(3)用C語言可以開/關(guān)中斷;
(4)處理器能支持一定數(shù)量的數(shù)據(jù)存儲硬件堆棧(可能是幾kB);
(5)處理器有將堆棧指針以及其他CPU寄存器的內(nèi)容讀出并保存到堆棧或者內(nèi)存中去的指令。
本系統(tǒng)軟件程序主要分為3個(gè)部分:輸入部分、控制部分和輸出部分。下面分別進(jìn)行介紹。
輸入設(shè)備主要包括鍵盤、射頻識別讀卡器,以及構(gòu)成輸入設(shè)備的接收系統(tǒng):GPS/GIS接收器和GPRS模塊等。在車輛的行駛過程中,射頻識別模塊負(fù)責(zé)正確接收路況信息,鍵盤負(fù)責(zé)等待用戶接收車上用戶指令,GPRS模塊負(fù)責(zé)接收遠(yuǎn)程工作站的數(shù)據(jù)信息,該模塊在啟動后主要是負(fù)責(zé)與工作站取得聯(lián)系,進(jìn)行信息交流,并且不斷更新系統(tǒng)內(nèi)部分路徑信息,方便車輛能夠及時(shí)轉(zhuǎn)向。GPS和GIS模塊則主要負(fù)責(zé)使系統(tǒng)能夠接收到車輛目前的準(zhǔn)確位置。
輸出設(shè)備主要包括顯示屏等,通過顯示屏獲取車輛所在位置和路況信息等。他的主要作用在于根據(jù)要求輸出相應(yīng)的高低電平來提供轉(zhuǎn)向所需要的電壓。實(shí)現(xiàn)原理是通過從標(biāo)簽獲得數(shù)據(jù)信息使得系統(tǒng)產(chǎn)生高低電平,同時(shí),系統(tǒng)必須將GPS模塊和GPRS模塊提供的數(shù)據(jù)通過人機(jī)界面顯示在屏幕上使得用戶能夠?qū)崟r(shí)地看到車輛的信息,包括前方路況、車輛位置等。
控制部分是本系統(tǒng)的關(guān)鍵,流程圖見圖3。

控制部分的流程是這樣的:首先將操作系統(tǒng)下載到目標(biāo)板,目標(biāo)板初始化,并且設(shè)置各個(gè)模塊的中斷向量來保證各個(gè)模塊啟動后能夠正確運(yùn)行。中斷優(yōu)先級的排序是讀卡器優(yōu)先級最高,其次是GPRS,最后是GPS。同時(shí),顯示屏顯示操作界面,用戶可以輸入指令使得汽車啟動。當(dāng)車輛啟動后,各模塊也隨之運(yùn)行,系統(tǒng)程序?qū)⑥D(zhuǎn)入查詢狀態(tài),通過不斷掃描UART端口判斷是否有標(biāo)簽進(jìn)入識別區(qū)域。若進(jìn)入標(biāo)簽識別區(qū)域,讀卡器就會接收到射頻模塊識別到的條碼信號,判斷信號正確后,系統(tǒng)轉(zhuǎn)人中斷子程序。在中斷子程序中,系統(tǒng)會向GPIO端口提供相應(yīng)的高低電平作為輸出信號來實(shí)現(xiàn)轉(zhuǎn)向。GPRS是隨著車輛啟動后就立即啟動的,這是因?yàn)樗仨毑粩喔卤O(jiān)控中心提供的路徑信息來保證車輛的正常行駛。當(dāng)車輛停止時(shí)會發(fā)出電平信號,此時(shí),系統(tǒng)轉(zhuǎn)入等待狀態(tài),屏幕顯示操作界面,等待用戶進(jìn)行下一步操作。
4 結(jié)束語
本方案經(jīng)過測試仿真表明,自主轉(zhuǎn)向懸掛式獨(dú)軌車載在距離標(biāo)簽10 m內(nèi)能夠以915 MHz的頻率通過射頻模塊識別到前方軌道信息,而且能以115.2 kB/s的波特率與GPRS連接,然后接入GPRS網(wǎng)絡(luò)與遠(yuǎn)端網(wǎng)絡(luò)監(jiān)控站實(shí)時(shí)通信,進(jìn)行數(shù)據(jù)交換。同時(shí),系統(tǒng)能夠作出判斷,發(fā)出控制信號。根據(jù)測試,該系統(tǒng)穩(wěn)定性高,實(shí)時(shí)性強(qiáng),如果能應(yīng)用到實(shí)際中,使用戶和工作站能夠了解車輛的工作狀態(tài),對減少交通事故有很大的意義。
近年來,不少國家在開發(fā)無人駕駛汽車技術(shù)。這樣的汽車并非科幻電影中的道具,英國已經(jīng)準(zhǔn)備2010年就在部分機(jī)場投放這種無人罵駛汽車。在不久的將來,英國政府將修建專門的無人駕駛汽車公路:或者在一般公路上開辟無人駕駛汽車快速通道。有關(guān)專家表示,在解決城市交通問題上,無人駕駛汽車因不用司機(jī)而成本更低,而且這些汽車采用電力驅(qū)動,更加環(huán)保。無人駕駛汽車可和城市交通指揮中心聯(lián)網(wǎng),選擇最好的路線,有效避免塞車。





























 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論