這個(gè)小風(fēng)扇有個(gè)電機(jī)調(diào)速電路,通過PWM進(jìn)行調(diào)速
2023-07-20 08:56:11 6775
6775 
這個(gè)程序的頻率是多少?是不是看根據(jù)定時(shí)的時(shí)間計(jì)算的??要改成10k頻率怎么改?謝謝!bit Right_moto_stop=1; bit Left_moto_stop =1; unsigned
2017-04-07 13:29:55
步進(jìn)電機(jī)的工作原理是什么?51單片機(jī)如何調(diào)速步進(jìn)電機(jī)?
2021-10-19 07:44:43
用51單片機(jī)做了個(gè)遙控小車,請問如何用51單片機(jī)模擬pwm控制直流電機(jī)調(diào)速呢?
2017-06-07 15:57:55
51單片機(jī)藍(lán)牙遙控小車程序,閑時(shí)偷學(xué)51一周 完成藍(lán)牙小車定時(shí)器中斷PWM調(diào)速控制關(guān)鍵問題: 51藍(lán)牙串口通信、定時(shí)器、中斷、L298N、PWM調(diào)速先把我學(xué)習(xí)過程中的問題擺出來:89C52僅有的兩個(gè)
2021-07-19 06:02:36
我在做畢業(yè)設(shè)計(jì)智能小車,有木有大神分享PWM調(diào)速的資料啊,不勝感激啊。
2015-04-28 10:16:46
,只需要控制電機(jī)兩端的電壓即可。以三極管作為驅(qū)動(dòng)器件驅(qū)動(dòng)小功率的電機(jī),其電路原理圖如下圖所示。電機(jī)作為負(fù)載接在三極管的集電極上,基極由單片機(jī)控制。2-直流電機(jī)調(diào)速原理圖當(dāng)單片機(jī)輸出高電平時(shí),三極管導(dǎo)
2019-12-10 11:06:21
決定重載時(shí)間,也就是控制PWM的周期或頻率,寄存器2決定翻轉(zhuǎn)時(shí)間,控制PWM的占空比。2、PWM調(diào)速原理PWM為高電平,電機(jī)提速運(yùn)轉(zhuǎn),為低電平,電機(jī)不提速運(yùn)轉(zhuǎn)(由于電感的存在以及頻率較快,轉(zhuǎn)速可視為在
2022-01-11 08:30:11
1、沒有統(tǒng)一的標(biāo)準(zhǔn),其實(shí)PWM的頻率和你的電機(jī)感抗和你需要的速度響應(yīng)時(shí)間有很大的關(guān)系。一般的電機(jī)用14K就足夠了。當(dāng)然自需要簡單的調(diào)速可以隨便選。 如果電機(jī)轉(zhuǎn)速比較高,感抗比較小,可以使用比較
2021-09-09 08:51:10
直流電機(jī)的調(diào)速原理是什么?PWM信號調(diào)速的原理是什么?PWM如何實(shí)現(xiàn)電機(jī)的正反轉(zhuǎn)以及調(diào)速呢?
2021-09-23 07:31:26
頻調(diào)速原理在PWM調(diào)速系統(tǒng)中,一般可以采用定寬調(diào)頻、調(diào)寬調(diào)頻、定頻調(diào)寬3 種方法改變控制脈沖的占空比,但是前兩種方法在調(diào)速時(shí)改變了控制脈寬的周期,從而引起控制脈沖頻率的改變,當(dāng)該...
2021-09-08 06:59:03
,想要調(diào)節(jié)電機(jī)的轉(zhuǎn)速,只需要控制電機(jī)兩端的電壓即可。只要單片機(jī)輸出占空比可調(diào)的方波,即PWM信號即可控制電機(jī)兩端的電壓發(fā)生變化,從而實(shí)現(xiàn)電機(jī)轉(zhuǎn)速的控制。2 PWM信號調(diào)速的原理所謂PWM,就是脈沖寬度調(diào)制技術(shù),其具有兩個(gè)很重要的參數(shù):頻率和占空比。頻率,就是周期的倒數(shù);占空比,就是高電平...
2022-01-13 07:41:38
PWM的調(diào)速原理與應(yīng)用—小車調(diào)速17-1.PWM調(diào)速基本原理17-2.P89V51RD2的PWM功能模塊結(jié)構(gòu)與應(yīng)用17-3.智能小車電機(jī)調(diào)速案例分析 17-4.課后思考和實(shí)驗(yàn)準(zhǔn)備[hide][/hide]
2009-03-29 10:10:48
各位大神幫我看看程序哪里出了問題,想用狀態(tài)機(jī)搞一個(gè)PWM的電機(jī)調(diào)速,并且用一個(gè)按鍵設(shè)置做兩種功能,1S內(nèi)短按則打開或者關(guān)閉電機(jī),長按PWM調(diào)速,1~6S內(nèi)PWM是一直加速,6~11S是減速,大于五秒
2020-05-10 16:57:03
本帖最后由 vbairbus 于 2014-4-10 22:50 編輯
單片機(jī)PWM控制直流電機(jī)調(diào)速,如果額定電流小于0.5A ,可用ULN2003做功率管控制直流電機(jī)調(diào)速 ,但如果額定電流較大,達(dá)5A以上,單片機(jī)又用什么功率管控制直流電機(jī)調(diào)速呢?
2014-04-10 22:49:19
單片機(jī)小車PWM調(diào)速程序
2013-08-19 11:28:59
損壞的作用 。 本次程序實(shí)現(xiàn)原理通過單片機(jī)IO口輸出高低電平驅(qū)動(dòng)電機(jī)的正反轉(zhuǎn),然后再通過定時(shí)器產(chǎn)生PWM信號進(jìn)而調(diào)速 定時(shí)器初始化 定時(shí)器中斷函數(shù) 控制電機(jī)方向 通過PWM信號占空比調(diào)節(jié)AB
2023-03-22 16:17:49
[table][tr][td] ;這是一個(gè)單片機(jī)進(jìn)行脈寬調(diào)制(PWM) 直流電機(jī)調(diào)速測試程序.;UNL2003提供電機(jī)驅(qū)動(dòng)電流.(
2018-07-19 03:57:34
直流電機(jī)PWM調(diào)速:使用將直流電機(jī)轉(zhuǎn)速轉(zhuǎn)換為脈沖頻率,測量出電機(jī)的轉(zhuǎn)速,與寫入到單片機(jī)的EEPROM里的脈沖設(shè)定值進(jìn)行比較產(chǎn)生偏差,若偏差為正值則電機(jī)減速,偏差為負(fù)值則加速,并在LCD上顯示電機(jī)
2021-06-29 08:59:21
PWM電機(jī)調(diào)速(寄存器版)我的上一篇博客已經(jīng)寫了如何用定時(shí)器產(chǎn)生PWM來實(shí)現(xiàn)LED燈的呼吸燈效果,當(dāng)我想實(shí)現(xiàn)PWM來控制電機(jī)調(diào)速時(shí),網(wǎng)上翻閱了很多的資料但是大多數(shù)是在呼吸燈的基礎(chǔ)上改一下代碼實(shí)現(xiàn)
2021-09-07 08:58:20
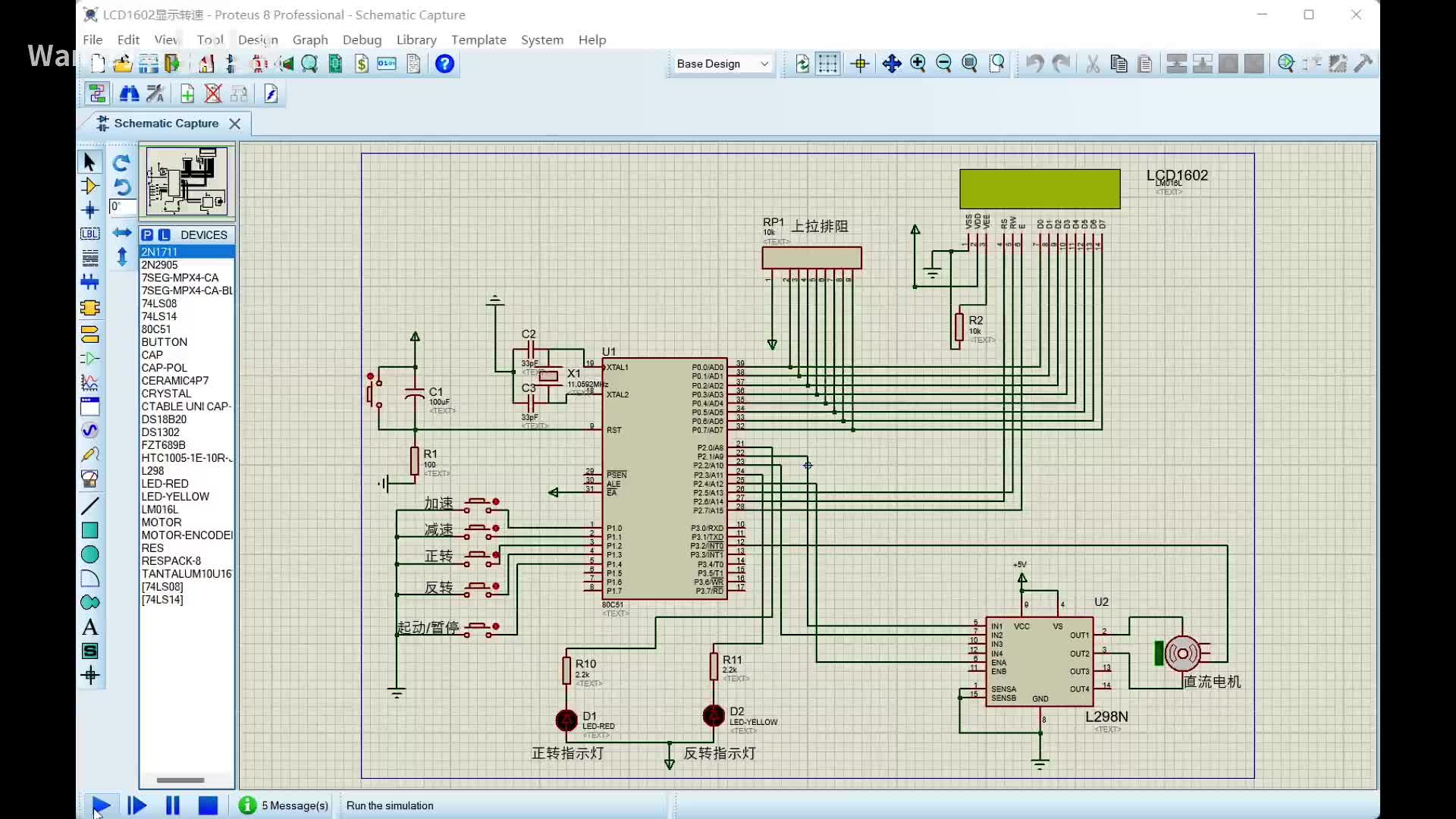
【資源下載】單片機(jī)電機(jī)PWM調(diào)速控制系統(tǒng)霍爾測速儀溫度檢測4本系統(tǒng)由STC89C52單片機(jī)、LCD1602液晶顯示、L298N電機(jī)驅(qū)動(dòng)模塊、按鍵、霍爾傳感器、DS18B20溫度傳感器及電源組成。1
2021-07-19 07:01:37
51單片機(jī)沒有PWM波產(chǎn)生模塊,有時(shí)候需要用到PWM功能,想用51單片機(jī)實(shí)現(xiàn),這真是令人傷腦筋。先貼出我寫的一個(gè)比較簡單的產(chǎn)生PWM的程序,該程序使用了一個(gè)定時(shí)器和一個(gè)IO端口就實(shí)現(xiàn)了
2018-07-19 09:03:52
改論文介紹了基于STC89C52RC微控制器發(fā)生PWM信號并輸出給驅(qū)動(dòng)模塊L298來實(shí)現(xiàn)控制直流電機(jī)的調(diào)速系統(tǒng),通過改變PWM信號占空比來實(shí)現(xiàn)直流電機(jī)調(diào)速以及怎么利用單片機(jī)改變占空比。
2014-06-30 19:29:15
該設(shè)計(jì)是由AT89C51單片機(jī)為主控芯片顯示為1602液晶構(gòu)成直流電機(jī)調(diào)速開機(jī)默認(rèn)不轉(zhuǎn)按下啟動(dòng)后電機(jī)開始運(yùn)行,PID控制PWM進(jìn)行調(diào)速、按鍵可實(shí)現(xiàn)加減速正反轉(zhuǎn)。
2021-06-30 07:18:06
基于51單片機(jī)霍爾轉(zhuǎn)速測量溫度PWM調(diào)速設(shè)計(jì)
2023-09-25 07:32:27
`基于單片機(jī)AT89S52的直流電機(jī)PWM調(diào)速控制系統(tǒng) `
2013-08-15 17:11:21
基于單片機(jī)AT89S52的直流電機(jī)PWM調(diào)速控制系統(tǒng) 基于單片機(jī)AT89S52的直流電機(jī)PWM調(diào)速控制系統(tǒng).rar 2016-5-7 19:52 上傳 點(diǎn)擊文件名下載附件 256.61 KB, 下載次數(shù): 19
2018-07-19 05:43:28
基于單片機(jī)用軟件實(shí)現(xiàn)直流電機(jī)PWM 調(diào)速系統(tǒng)
2012-08-19 23:45:04
基于單片機(jī)用軟件實(shí)現(xiàn)直流電機(jī)PWM 調(diào)速系統(tǒng)
2013-07-28 14:49:49
介紹了基于單片機(jī)用PWM實(shí)現(xiàn)直流電機(jī)調(diào)整的基本方法,直流電機(jī)調(diào)速的相關(guān)知識,及PWM調(diào)整的基本原理和實(shí)現(xiàn)方法。重點(diǎn)介紹了基于MCS一51單片機(jī)的用軟件產(chǎn)生PWM信號的途徑,并介紹了一種獨(dú)特的通過采用計(jì)數(shù)法加軟件延時(shí)法實(shí)現(xiàn)PWM信號占空比調(diào)節(jié)的方法。對于直流電機(jī)速度控制系統(tǒng)的實(shí)現(xiàn)提供了一種有效的途徑。
2023-09-22 07:56:38
基于單片機(jī)的AT89C51的直流電機(jī)PWM調(diào)速系統(tǒng)文章設(shè)計(jì)了以單片機(jī)AT89C51和L298控制的直流電機(jī)脈寬調(diào)制(PWM)調(diào)速系統(tǒng)。主要介紹了用單片機(jī)軟件實(shí)現(xiàn)PWM調(diào)整電機(jī)轉(zhuǎn)速的基本方法, 給出
2009-12-07 16:34:36
的主程序和中斷程序來實(shí)現(xiàn)正弦脈沖寬度調(diào)制,方便的實(shí)現(xiàn)變頻調(diào)速。采用MATLAB仿真可以得到PWM變頻調(diào)速的結(jié)果,最后和通過單片機(jī)產(chǎn)生PWM控制波所得到的實(shí)驗(yàn)結(jié)果一致,進(jìn)一步證明了基于安芯一號單片機(jī)
2013-10-20 19:45:20
stm32單片機(jī)實(shí)現(xiàn)直流電機(jī)PWM調(diào)速,這篇博客記錄了博主在實(shí)現(xiàn)直流電機(jī)PWM調(diào)速過程中32單片機(jī)源碼以及遇到的一些問題。以下是本篇文章正文內(nèi)容:一、L298N電機(jī)驅(qū)動(dòng)模塊1、 使用介紹當(dāng)驅(qū)動(dòng)電壓(板子背面標(biāo)識為12V輸入,實(shí)際可以接受的輸入范圍是7-12V)為7V-12V的時(shí)候,即12V電機(jī)驅(qū)動(dòng)端
2021-09-07 08:25:09
直流電機(jī)PWM調(diào)速系統(tǒng)是由哪些部分組成的?直流電機(jī)PWM調(diào)速系統(tǒng)具體有哪些功能?直流電機(jī)PWM調(diào)速系統(tǒng)的硬件部分是怎樣去設(shè)計(jì)的?直流電機(jī)PWM調(diào)速系統(tǒng)的軟件部分是怎樣去設(shè)計(jì)的?
2021-07-13 06:04:27
基于51單片機(jī)的霍爾直流電機(jī)PWM調(diào)速系統(tǒng)有哪些具體功能?怎樣去設(shè)計(jì)基于51單片機(jī)的霍爾直流電機(jī)PWM調(diào)速系統(tǒng)?
2021-10-19 08:53:36
控制直流電機(jī)的正轉(zhuǎn)反轉(zhuǎn)和PWM調(diào)速直流電機(jī)驅(qū)動(dòng),單片機(jī)與L298之間如何用光耦隔離?
2012-12-06 15:54:01
電機(jī)PWM調(diào)速原理是什么?
2021-12-21 07:21:43
單片機(jī)控制的直流電機(jī)PWM調(diào)速大典
2015-07-30 09:35:12
能用51單片機(jī)、ds18b20、直流電機(jī)做一個(gè)智能風(fēng)扇嗎?要求:1、單片機(jī)上電后ds18b20、直流電機(jī)均工作2、直流電機(jī)的PWM調(diào)速由溫度控制,溫度高轉(zhuǎn)的快溫度低轉(zhuǎn)的慢
2016-08-01 09:10:15
如何不用單片機(jī)只用pwm控制直流電機(jī)調(diào)速及四位一體數(shù)碼管顯示
2018-12-27 18:46:55
小弟最近研究單片機(jī)。急需單片機(jī)AT89C51的直流電機(jī)脈寬調(diào)制(PWM)調(diào)速系統(tǒng)。
2015-05-19 17:16:51
17-1. PWM調(diào)速基本原理17-2. P89V51RD2的PWM功能模塊結(jié)構(gòu)與應(yīng)用17-3. 智能小車電機(jī)調(diào)速案例分析 17-4. 課后思考和實(shí)驗(yàn)準(zhǔn)備PWM脈沖驅(qū)動(dòng)電路直流電機(jī)的
2009-03-23 12:18:53 130
130 8098 單片機(jī)和伺服電機(jī)PWM 調(diào)速控制
摘 要 本文介紹應(yīng)用8098 單片機(jī)豐富的接口功能, 采用數(shù)字調(diào)制的方法來實(shí)現(xiàn)直流伺服電機(jī)的PWM 調(diào)速控制。
2010-04-13 15:09:42130 摘要:本文介紹應(yīng)用8098單片機(jī)豐富的接口功能,采用數(shù)字調(diào)制的方法來實(shí)現(xiàn)直流伺服電機(jī)的PWM調(diào)速控制。關(guān)鍵詞:單片機(jī) PWM調(diào)制波 數(shù)字調(diào)制
2010-08-06 12:42:26146 摘要:本文以89C51單片機(jī)為控制核心,以L298為驅(qū)動(dòng),實(shí)現(xiàn)直流電動(dòng)機(jī)的PWM調(diào)速,給出了系統(tǒng)的電路原理及PWM信號產(chǎn)生的方法.在Proteus軟件中仿真實(shí)現(xiàn)。關(guān)鍵詞:PWM;L298;Proteus;
2010-08-13 12:00:52279 PWM調(diào)速基本原理
PWM脈沖驅(qū)動(dòng)電路直
2006-01-01 01:21:102565 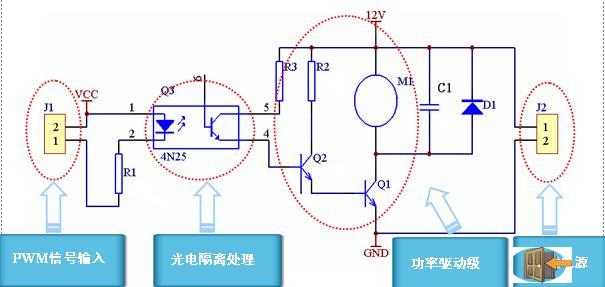
PWM調(diào)速基本原理
PWM脈沖驅(qū)動(dòng)電路直
2009-03-27 23:21:2239050 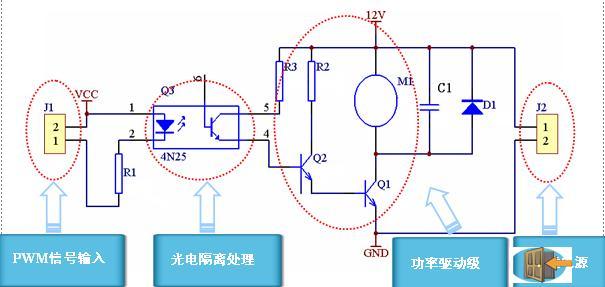
本文主要研究了利用與MCS-51兼容的at89c51單片機(jī),通過PWM方式控制直流電機(jī)調(diào)速的方法。
2011-11-02 18:19:34547 單片機(jī)pwm產(chǎn)生的方法及程序,里面的很詳細(xì)的教程
2015-11-02 17:36:3097 小白入門,基于pwm調(diào)速的理論基礎(chǔ)。。。。。。。。。。。。。。。。。。。。。。。。。
2015-11-12 11:36:4629 PWM直流雙閉環(huán)調(diào)速系統(tǒng)設(shè)計(jì)電子技術(shù)方面的知識點(diǎn),對學(xué)習(xí)有幫助
2015-11-24 10:09:020 51單片機(jī)接驅(qū)動(dòng)L298N,PWM調(diào)速程序。
2016-05-11 11:08:051 單片機(jī)pwm模塊的程序。
2016-05-19 17:45:2510 用單片機(jī)PWM調(diào)速與JY01連接電路。
2016-05-20 10:12:4512 基于單片機(jī)的pwm調(diào)速系統(tǒng)的設(shè)計(jì) 內(nèi)附有pcb圖
2016-06-21 16:27:340 基于PWM細(xì)分的步進(jìn)電機(jī)調(diào)速 包括原理圖、PCB、源程序仿真、元件。
2016-07-21 16:35:2821 Pwm電機(jī)調(diào)速原理介紹,以及C語言代碼。
2016-08-31 16:11:3427 最簡單的四路循跡小車(PWM調(diào)速)
2016-12-17 15:58:1483 PWM調(diào)速+循跡__智能小車程序
2017-02-07 17:14:52132 “半橋型”可逆直流PWM調(diào)速電路
2017-01-23 20:48:1620 PWM電機(jī)調(diào)速在專用打印機(jī)中的應(yīng)用_牟岳泰
2017-03-19 11:27:340 “半橋型”可逆直流PWM調(diào)速電路
2017-03-19 11:45:233 基于AVR單片機(jī)實(shí)現(xiàn)的直流電機(jī)PWM調(diào)速控制器
2017-10-15 10:19:1128 對于電機(jī)的轉(zhuǎn)速調(diào)整,我們是采用脈寬調(diào)制(PWM)辦法,控制電機(jī)的時(shí)候,電源并非連續(xù)地向電機(jī)供電,而是在一個(gè)特定的頻率下以方波脈沖的形式提供電能。不同占空比的方波信號能對電機(jī)起到調(diào)速作用,這是因?yàn)殡姍C(jī)
2017-10-26 16:59:454047 本人最近一直想用51單片機(jī)來設(shè)計(jì)制作一個(gè)“大功率直流有刷電機(jī)PWM調(diào)速控制器”。由于平時(shí)工作忙,沒時(shí)間。所以,這個(gè)東東花了我很長時(shí)間。
2018-02-07 16:51:1913447 本文主要介紹了基于PWM細(xì)分的步進(jìn)電機(jī)調(diào)速設(shè)計(jì).
2018-06-25 08:00:00111 這是一款A(yù)T89C51單片機(jī)直流電機(jī)PWM調(diào)速程序,程序可以直接用于AT89C52、AT89S51、AT89S51,STC89C51、STC89C52單片機(jī)中,單片機(jī)晶振采用11.0592M,直流電機(jī)由L298集成電路控制,產(chǎn)生的PWM的頻率約為91Hz。
2018-10-19 16:03:5616112 這是一款A(yù)T89C51單片機(jī)直流電機(jī)PWM調(diào)速程序,程序可以直接用于AT89C52、AT89S51、AT89S51,STC89C51、STC89C52單片機(jī)中,單片機(jī)晶振采用11.0592M,直流電機(jī)由L298集成電路控制,產(chǎn)生的PWM的頻率約為91Hz。
2018-10-24 15:56:4847770 
本文檔的主要內(nèi)容詳細(xì)介紹的是使用51單片機(jī)實(shí)現(xiàn)PWM直流電機(jī)調(diào)速的程序和注釋詳細(xì)資料免費(fèi)下載.
2018-11-05 18:05:0476 本文檔的主要內(nèi)容詳細(xì)介紹的是51單片機(jī)的PWM程序資料免費(fèi)下載。
2019-04-02 17:13:5774 本文檔的主要內(nèi)容詳細(xì)介紹的是單片機(jī)模擬pwm調(diào)速或調(diào)光的程序資料免費(fèi)下載。
2019-04-11 18:29:0019 本文檔的主要內(nèi)容詳細(xì)介紹的是使用51單片機(jī)輸出PWM波形的程序免費(fèi)下載。
2019-08-29 17:29:0063 本文檔的主要內(nèi)容詳細(xì)介紹的是使用51單片機(jī)進(jìn)行PWM的程序和講解免費(fèi)下載。
2019-06-17 17:44:007 介紹一種基于 MC51單片機(jī)控制的 PWM直流電機(jī)脈寬調(diào)速系統(tǒng) 。系統(tǒng)利用 MC51單片機(jī)的定時(shí)器來產(chǎn)生 PWM脈沖 ,利用 TLP250光耦實(shí)現(xiàn)控制單元與驅(qū)動(dòng)單元的強(qiáng)弱電隔離 , 采用驅(qū)動(dòng)芯片
2019-04-28 08:00:006 介紹了基于單片機(jī)用PWM實(shí)現(xiàn)直流電機(jī)調(diào)整的基本方法,直流電機(jī)調(diào)速的相關(guān)知識,及PWM調(diào)整的基本原理和實(shí)現(xiàn)方法。重點(diǎn)介紹了基于MCS一51單片機(jī)的用軟件產(chǎn)生PWM信號的途徑,并介紹了一種獨(dú)特的通過采用計(jì)數(shù)法加軟件延時(shí)法實(shí)現(xiàn)PWM信號占空比調(diào)節(jié)的方法。對于直流電機(jī)速度控制系統(tǒng)的實(shí)現(xiàn)提供了一種有效的途徑。
2020-07-15 16:12:0050 本文檔的主要內(nèi)容詳細(xì)介紹的是使用51單片機(jī)實(shí)現(xiàn)霍爾轉(zhuǎn)速測量溫度PWM調(diào)速系統(tǒng)的設(shè)計(jì)源代碼免費(fèi)下載。
2020-09-27 18:10:1025 基于STM32單片機(jī)的小車PWM調(diào)速系統(tǒng)
2021-06-03 09:22:2040 關(guān)于PWM脈沖寬度調(diào)制與智能小車PWM直流電機(jī)調(diào)速的單片機(jī)實(shí)驗(yàn)(現(xiàn)代電源技術(shù)王建輝答案)-關(guān)于PWM脈沖寬度調(diào)制與智能小車PWM直流電機(jī)調(diào)速的單片機(jī)實(shí)驗(yàn),非常適合有一定基礎(chǔ)的學(xué)習(xí)者學(xué)習(xí),可以提高自己的能力,大家可以多交流哈
2021-09-16 15:27:1514 51單片機(jī)實(shí)現(xiàn)PWM直流電機(jī)調(diào)速(注釋詳細(xì))(電源技術(shù)投稿)-51單片機(jī)實(shí)現(xiàn)PWM直流電機(jī)調(diào)速(注釋詳細(xì)),實(shí)現(xiàn)功能:可以直接的調(diào)速從0到20級的調(diào)速。非常適單片機(jī)愛好者參考學(xué)習(xí)。
2021-09-24 14:58:35247 基于AVR單片機(jī)的直流電動(dòng)機(jī)的PWM調(diào)速系統(tǒng)設(shè)計(jì)(ups電源技術(shù)協(xié)議范本)-該文檔為基于AVR單片機(jī)的直流電動(dòng)機(jī)的PWM調(diào)速系統(tǒng)設(shè)計(jì)講解文檔,是一份不錯(cuò)的參考資料,感興趣的可以下載看看,,,,,,,,,,,,,,,,,
2021-09-24 15:04:468 基于單片機(jī)直流PWM調(diào)速控制設(shè)計(jì)
2021-11-23 16:22:4683 一、直流電機(jī)工作原理1、直流電機(jī)正反轉(zhuǎn)——通過高低電平反轉(zhuǎn)實(shí)現(xiàn)2、電機(jī)調(diào)速通過PWM波實(shí)現(xiàn)——PWM通過51單片機(jī)定時(shí)器輸出,實(shí)現(xiàn)占空比調(diào)整。二、功能程序端口定義及宏定義sbit PWM1=P2
2021-11-23 17:06:1751 51單片機(jī) L298驅(qū)動(dòng)2路電機(jī)PWM調(diào)速+Proteus仿真Proteus仿真實(shí)例代碼
2021-11-23 17:06:2563 51單片機(jī)+L293D控制直流電機(jī)起保停數(shù)碼管PWM調(diào)速顯示PWM速度10級可調(diào)采用L293D驅(qū)動(dòng)數(shù)碼管顯示PWM當(dāng)前占空比可優(yōu)化的地方是數(shù)碼管可以采用其他驅(qū)動(dòng)芯片來驅(qū)動(dòng),提高驅(qū)動(dòng)能力和減少單片機(jī)
2021-11-23 17:21:3832 基于51單片機(jī)直流電機(jī)PID調(diào)速設(shè)計(jì)LCD1602仿真可調(diào)PWM
2021-11-23 17:36:2466 【開源教程】51單片機(jī)藍(lán)牙小車 定時(shí)器中斷 PWM調(diào)速控制 關(guān)鍵問題: 51藍(lán)牙串口通信、定時(shí)器、中斷、L298N、PWM調(diào)速;初來乍到,哪里有不對的地方 歡迎指正!
2022-04-11 14:52:401 基于Labview的PWM電機(jī)調(diào)速,選用VISA串口,實(shí)現(xiàn)直流電機(jī)的PWM調(diào)速
2022-06-24 14:35:5328 51單片機(jī)驅(qū)動(dòng)直流電機(jī)與 PWM 調(diào)速是通過使用 51 單片機(jī)來控制直流電機(jī)的轉(zhuǎn)速和方向。51 單片機(jī)通過控制電機(jī)的電流來實(shí)
現(xiàn)驅(qū)動(dòng),并通過生成 PWM 信號來調(diào)節(jié)電機(jī)的轉(zhuǎn)速。使用 PWM 調(diào)速
2023-03-30 13:42:4414 基于51單片機(jī)的PWM控制LED燈漸亮漸滅設(shè)計(jì)資料源程序
2023-04-27 15:09:3120 基于89C51單片機(jī)的PWM調(diào)光源程序
2023-05-16 09:55:215 基于89C51單片機(jī)的步進(jìn)電機(jī)調(diào)速原理源程序
2023-05-16 09:42:3010 電子發(fā)燒友網(wǎng)站提供《基于51單片機(jī)PWM波實(shí)現(xiàn)拖尾燈的程序.doc》資料免費(fèi)下載
2023-10-24 10:00:270
正在加载...
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論