 電子發燒友App
電子發燒友App


文章表明,即使是雙元件電路也可能涉及重要的動態推導。文中的跨阻放大器分析為這樣的電路提出了一個通用的設計模板,還提供了一個指導示例,來解釋如何分析放大器的動態特性。在本系列文章的第一部分中,運算放大器從有限增益單極放大器近似為無限增益單極運算放大器,推導出跨阻放大器電路的增益,如圖1所示。在本文的第二部分,我們將研究其后果。
圖1:一個看似簡單的電路只有兩個器件:運算放大器和反饋電阻。
從第一部分得知,推導增益即跨阻抗為:
極點是:
放大器增益使我們有機會將控制理論應用于電路。這個例子將說明控制理論在理解電路動態特性時的重要性和實用性。逐步實施,而不是一股腦全堆進來,希望這樣能夠對控制技術及其應用方式有深入了解。
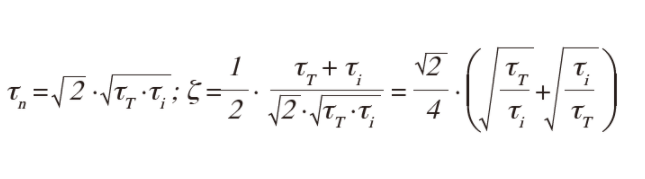
極點對(二次)多項式通常表示為:
放大器的諧振時間常數τn = 1/ωn = 1/(2 x π x fn)和阻尼ζ分別為:
當ζ《1時,極點變為復數極點對,極角為:
對于實極點,ζ 》 1且φ = 0。
對于恒定組(或包絡)時延(最大平坦包絡延遲/MFED或貝塞爾)響應,相位隨頻率線性減小,并且發生在φ = 30o的極角處。所有頻率的時延都是相同的,保持波形不變。然后:
對于跨阻放大器MFED響應:
對于臨界阻尼(沒有過沖的最快階躍響應),ζ = 1且τT = 4 x τi或fT = fi/4。兩個極點都是fi/2。
隨著RR變大、fi減小,放大器在vix中顯示出更大的過沖。在某種程度上,這對于Z-meter是有利的,因為極角φ = 45°,阻尼ζ = cos(φ) = cos(45o) ≈ 0.707,并且頻率(或幅度)響應是恒定或平坦的,接近帶寬頻率。這就是最大平坦幅度(MFA)頻率響應。對于穩態(頻域)應用,MFA響應是最佳的。對于具有理想階躍響應的瞬態(時域)應用,MFED響應是最佳的。(在示波器垂直放大器的設計中,優化兩種響應的標準是沖突的。)
運放速度和放大器穩定性
慢運放具有低fT且τT 》》 τi,導致兩個實極點離得比較遠。在極限值:
這是原點和fi處的極點。fT必須足夠小以保持fT 《《 fi。然而,隨著fT減小,環路增益減少,可能不足以維持容許的運算放大器增益誤差。在這種情況下,精度需要一定的速度。
隨著運放fT的增加,Zm的阻尼減小,穩定性降低。對于給定的?和fi:
若fT = 1MHz且G0 = 105,則fG = 10Hz,并且臨界阻尼回路(ζ = 1)的fi = 40Hz。假設Ci = 10pF,那么RR = 398MΩ,這樣對于任何較小的值都可以保持fi 》 40Hz。
圖2顯示了閉環極點隨著fT(更快的運放)的增加而移動的情況。在原點和fi(–1/τi)處的分離極點在fi/2(此時π = 1)處聚集在一起,然后變為復數極點對。隨著fT增加,極角增加并且ζ減小。放大器變得不穩定,響應更加振蕩。
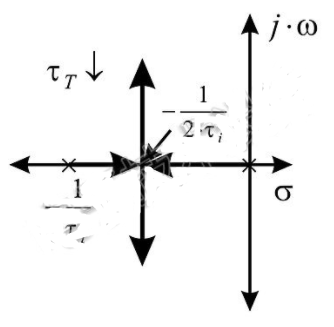
圖2:閉環極點隨著fT的增加而移動。
只要變化的參數(圖2中的fT或τT)同時出現在多項式的s2和s項中,圖中就會顯示極點移動的位置或軌跡。放大器在無限fT時阻尼最小,當τT → 0s時極點位置在極限值:
在jxω軸上有兩個值,其響應是穩定的(而不是振蕩的):原點和±jx ∞處。兩者都是無限的,(Zero(0)是無窮小的)。當τT → 0s時,極點多項式的s中的兩個項接近零,留下恒定的1項,并且不受頻率影響。在極限情況下,極點位于jxω軸上,ζ= 0(振蕩器的條件),但在s的有限值處,它們的幅度為零。極點頻率很高,阻尼不再重要。它們與fi相距太遠而不會影響環路動態。這是理想運算放大器的條件。因此,我們可以得出結論,對于非常慢或非常快的運算放大器,極點是充分分離的,以使響應穩定。只有在fT的范圍內,這時運算放大器和Ci極點太靠近,阻尼在足夠低的極點頻率fn處過度降低,同時放大器中發生幅度相當大的振蕩。
再回到跨阻放大器,如果運算放大器幾乎是理想的,也就是說,速度快到τT ≈ 0s,則極點多項式大約為1。對于足夠快的運算放大器,fT 》》 fi,而且極點分開,就會有穩定的環路。為了提供額外的阻尼,使運算放大器fT(和環路增益)不會過低,電容器Cf需要通過RR分流。然后用包含Cf的電路代數計算:
極點對參數為:
Cf的作用是在二次系數中將τf加到τi,更重要的是加到線性項中的τT,這會增加阻尼。因為τi = τT,所以:
對于臨界阻尼,設π = 1;那么τT = (3 + 2 x √2) x τi ≈ 3.414 x τi且τn ≈ 1.848 x τi。如果沒有Cf(Cf = 0pF),如先前所計算的,τT = 4 x τi。若有Cf,在相同的動態響應下,運算放大器可以更快,即具有更高的G0并實現更高的精度。
頻率響應幅度和相位是:
對于理想的快速運算放大器(τT = 0s)并且當Cf = Ci(τf = τi)時,在頻率fg(或ωg)處具有響應:
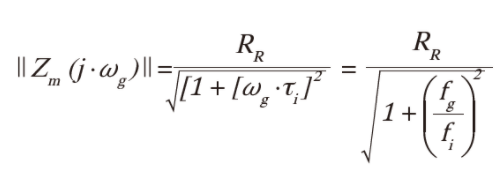
如果fi = 10 x fg,那么幅度誤差≈0.5%。因為fi = 10 x fg,相位誤差 ≈ 6o。相位誤差對頻率效應比對幅度誤差更敏感。這在阻抗計電路設計中很重要,有時在光電探測放大器中也很重要,因為光電探測波形要與一些其它波形同步。
避免大反饋電阻的電路
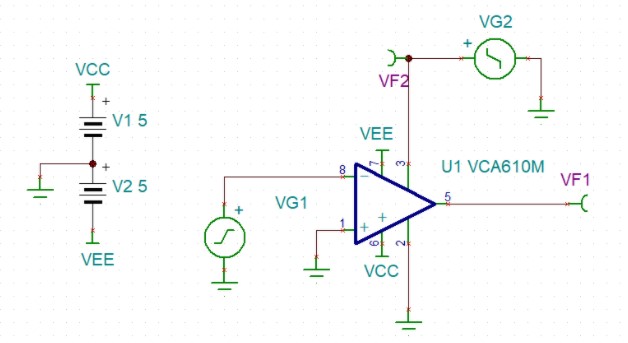
對于一些帶跨阻放大器的Z-meter(ZM)設計,RR要足夠大,即10MΩ或更大。當RR變得非常大時,要得到期望的阻尼,分流Cf必須很小,并且電阻分流寄生電容還可能過大。為了避免這個問題,可以使用以下電路代替。
圖3:使用該電路避免電阻分流寄生電容過大。
要讓運算放大器成為高增益單極運算放大器,G ≈ –1/s x τT(參見本系列文章第一部分有關G的推導)。反饋分頻器傳遞函數是:
且τf = RR x Cf。當電路用Rp = R1||R2求解時:
理想運算放大器(τT = 0s)的Zm降低到:
對于Rp = 0Ω,跨阻進一步降低至:
如果在輸出與RR和Cf之間插入快速×1緩沖放大器,則R1和R2分壓器輸出電阻不需要太小(Rp 《《 RR)。那么當Rp = 0Ω且運算放大器具有τT時:
該電路與沒有輸出分頻器的情況有兩個不同:RR和τT都有效地增加了1/Hdiv。
結語
通過本文兩部分的闡述可以看出,即使是只有兩個器件的簡單電路也可能涉及復雜的動態推導。設計人員有時會避免使用這些推導來減少數學計算的麻煩,但是使用這些公式可以更好地了解給定電路在各種條件下的性能表現。我們介紹的跨阻放大器分析可為這樣的電路設計提供一個模板,并提供如何分析放大器動態特性的指導性示例。
不要因為立方或更高次多項式而拒絕使用s域代數來解決電路動態問題。我們在本實例中遇到了一個立方項,但沒必要去解它,因為通過簡化可將多項式降為二次方程,方便以后的分析計算。這種情況很常見,因為電路在設計階段常常被模塊化,它們要么彼此隔離,要么通過受控端口阻抗進行受控交互。設計中可以應用模板方案,但通常限于s域中的二次方程。
責任編輯:gt









 工商網監
工商網監
評論