紅色是卡爾曼,藍(lán)色的是擴(kuò)展卡爾曼最后結(jié)論是互補(bǔ)【相應(yīng)速度】沒(méi)有卡爾曼快擴(kuò)展卡爾曼比卡爾曼【穩(wěn)定,抖動(dòng)小】附上一個(gè)C語(yǔ)言版本的卡爾曼濾波,有興趣的童鞋可以一起玩一下
2015-06-11 16:02:41
卡爾曼濾波的估計(jì)值能很好的逼近真實(shí)值,我的疑惑是,這和濾波有什么關(guān)系,請(qǐng)高手介紹下卡爾曼算法是如何濾波的?
2013-07-04 22:57:04
卡爾曼濾波的噪聲協(xié)方差怎么配置啊?
2017-08-01 10:05:29
卡爾曼濾波風(fēng)力發(fā)電機(jī)中的風(fēng)速估計(jì),轉(zhuǎn)速估計(jì)甚至扭矩估計(jì)都設(shè)計(jì)到卡爾曼濾波,如果只是單一傳感變量的平滑處理也能用到卡爾曼濾波。振動(dòng)信號(hào)中的濾波大多采用低通去除高頻噪音,而卡爾曼濾波則是通過(guò)不確定度把
2021-07-12 06:00:47
a往南向北 2019-01-16 20:39:20 11340 收藏 111分類(lèi)專欄: C語(yǔ)言嵌入式 文章標(biāo)簽: 卡爾曼濾波 C代碼卡爾曼濾波理論很容易就可以在MATLAB軟件環(huán)境下實(shí)現(xiàn),但是,實(shí)際
2021-08-17 09:10:43
卡爾曼濾波c++代碼,基于mpu6050的,非常好使。親測(cè)有效。
2020-04-18 14:32:48
一、卡爾曼濾波九軸融合算法stm32嘗試1、Kalman濾波文件[.h已經(jīng)封裝為結(jié)構(gòu)體]Kalman.h2、I2C總線代碼[這里把MPU和HMC掛接到上面,通過(guò)改變SlaveAddress的值來(lái)
2022-02-10 07:18:25
在控制領(lǐng)域,獲取控制對(duì)象**精確**的當(dāng)前狀態(tài)至關(guān)重要。但是在傳感器測(cè)量過(guò)程中由于**自身誤差**和**外部干擾**導(dǎo)致采樣值不準(zhǔn)確,卡爾曼濾波的作用就是為了**糾正**(correct)這些不準(zhǔn)確,從而得到較準(zhǔn)確的“**狀態(tài)值**”(采樣數(shù)據(jù));
2021-08-18 07:50:49
卡爾曼濾波器介紹
2016-08-17 12:06:34
卡爾曼濾波器介紹卡爾曼濾波器介紹Greg Welch1and Gary Bishop2TR 95-041Department of Computer ScienceUniversity
2008-07-14 13:06:49
卡爾曼濾波器原理的學(xué)習(xí)理解
2016-08-17 12:38:55
一、前言卡爾曼濾波器是一種最優(yōu)線性狀態(tài)估計(jì)方法(等價(jià)于“在最小均方誤差準(zhǔn)則下的最佳線性濾波器”),所謂狀態(tài)估計(jì)就是通過(guò)數(shù)學(xué)方法尋求與觀測(cè)數(shù)據(jù)最佳擬合的狀態(tài)向量。在移動(dòng)機(jī)器人導(dǎo)航方面,卡爾曼濾波是最常
2021-11-16 09:10:40
[開(kāi)發(fā)工具] STM32算法的翅膀之MATLAB基于加速度計(jì)與氣壓計(jì)的三階卡爾曼濾波計(jì)算加速度、速度及高度主要介紹了卡爾曼濾波器的使用原理,給出了matlab代碼,并在STM32F407平臺(tái)對(duì)卡爾曼濾波器進(jìn)行了驗(yàn)證,傳感器為MPU6050與DPS310,測(cè)試結(jié)果令人滿意,速度與高度無(wú)累積...
2021-08-17 07:02:07
將高斯過(guò)程回歸融入平方根無(wú)跡卡爾曼濾波(SRUKF)算法,本文提出了一種不確定系統(tǒng)模型協(xié)方差自適應(yīng)調(diào)節(jié)濾波算法.該算法分為學(xué)習(xí)和估計(jì)兩部分:學(xué)習(xí)階段用高斯過(guò)程對(duì)訓(xùn)練數(shù)據(jù)進(jìn)行學(xué)習(xí),得到系統(tǒng)回歸模型
2011-10-24 09:59:04
卡爾曼濾波器通俗講解
2016-08-17 12:06:59
請(qǐng)問(wèn)卡爾曼濾波在labview中如何實(shí)現(xiàn)
2012-12-11 17:53:19
卡爾曼濾波在信號(hào)處理方面用的是比較多的,資料也是非常多的,這里就不寫(xiě)了。自適應(yīng)卡爾曼濾波也有很多文獻(xiàn)有相關(guān)的介紹,其中用的比較多的有基于Sage-Husa算法實(shí)現(xiàn)的。這段時(shí)間剛好用到,順便做了一個(gè)
2021-08-18 06:49:31
卡爾曼濾波器是屬于一個(gè)高通濾波器還是帶通濾波器
2023-10-11 06:58:07
想寫(xiě)一個(gè)卡爾曼濾波程序,目前依照網(wǎng)上的說(shuō)法寫(xiě)的總是不成功,哪位有經(jīng)驗(yàn)的請(qǐng)指教一下,感激不盡,我是在labview編程環(huán)境下嘗試的
2017-05-21 20:18:08
卡爾曼濾波的原理和實(shí)現(xiàn)
2020-06-01 17:28:24
編論文有興趣,可以到這里的地址下載: http://www.cs.unc.edu/~welch/kalman/media/pdf/Kalman1960.pdf簡(jiǎn)單來(lái)說(shuō),卡爾曼濾波器是一個(gè)
2016-09-21 11:41:07
卡爾曼濾波的基本原理及應(yīng)用
2020-05-05 09:26:15
在陀螺儀和加速度計(jì)中使用卡爾曼濾波static float P[2][2] = {{ 1, 0 }, { 0, 1 }};//協(xié)方差矩陣P的兩列代表陀螺儀、加速度計(jì)兩維,那兩行代表什么呢?為什么P的數(shù)組元素是{{ 1, 0 }, { 0, 1 }}而不是其他值?
2013-11-04 21:06:10
上面是卡爾曼濾波的第五個(gè)公式,里面說(shuō)I是一個(gè)全1矩陣,然后可以轉(zhuǎn)換成下面這個(gè)式子,但是我仔細(xì)看了一下,如果想要轉(zhuǎn)換成這樣子,這個(gè)I應(yīng)該是個(gè)單位矩陣才對(duì),也就對(duì)角線為1的矩陣,全1矩陣乘以任意一個(gè)矩陣
2019-04-12 06:36:19
在這里我就不介紹卡爾曼的數(shù)學(xué)推算了,網(wǎng)上的數(shù)學(xué)推導(dǎo)一抓一大把,如果想了解推導(dǎo)過(guò)程的小伙伴可以去大佬的博客。如果你是想直接簡(jiǎn)單運(yùn)用卡爾曼濾波來(lái)處理mpu6050的數(shù)據(jù),或者是處理ADC的數(shù)據(jù),那么我
2022-02-28 14:24:57
已知測(cè)量值和原始值,但測(cè)量噪聲和觀測(cè)噪聲未知,如何進(jìn)行卡爾曼濾波。之前看了好像可以用自適應(yīng)卡爾曼,但不是很懂,求例子,最好有注釋的
2017-03-23 19:12:17
卡爾曼濾波算法對(duì)比其他的濾波算法有什么優(yōu)點(diǎn)
2023-10-11 06:42:24
卡爾曼濾波算法是怎么實(shí)現(xiàn)對(duì)數(shù)據(jù)的預(yù)測(cè)處理的
2023-10-10 08:28:02
請(qǐng)問(wèn),為什么在卡爾曼濾波器模型中,要大R 小Q,原因是什么?圖1 R = 5000 * eye(2);Q = eye(6);圖2 R = 500 * eye(2); Q = eye(6);請(qǐng)問(wèn)哪種情況追蹤效果好?
2016-05-12 18:02:53
卡爾曼濾波輸出的時(shí)候延時(shí)很大要怎么解決
2023-10-11 08:10:15
有偏卡爾曼濾波器可以用來(lái)消除無(wú)線定位中的非視距誤差,首次使用有偏卡爾曼濾波器的參考文獻(xiàn)是下面兩篇論文[1]劉琚,李靜.一種在非視距環(huán)境中的TDOA/AOA混合定位方法[J].通信學(xué)報(bào),2005,26
2011-11-07 13:55:15
最近正在學(xué)習(xí)卡爾曼濾波算法,用LabVIEW仿照C語(yǔ)言寫(xiě)了個(gè)一維的卡爾曼濾波程序,不知寫(xiě)的對(duì)不對(duì),發(fā)上來(lái)希望大家指正。
2017-10-21 21:15:50
以下是擴(kuò)展卡爾曼濾波和無(wú)味卡爾曼濾波對(duì)直線x=2*k+2進(jìn)行濾波,怎么改狀態(tài)方程和傳遞矩陣,跪求大神指導(dǎo),謝謝了。% EKF UKF算法clear;x = 0.1; % 初始狀態(tài)
2017-04-03 17:57:17
卡爾曼濾波的神經(jīng)網(wǎng)絡(luò)可以解決諸如BP網(wǎng)絡(luò)的一些缺陷。為大家提供幾篇這方面的參考文獻(xiàn)。
2011-02-28 09:29:36
最近一直被卡爾曼濾波困擾,希望哪位研究這方面的朋友能夠指點(diǎn)一下,不要太多理論數(shù)學(xué),基本思路加上一定的代碼就好,萬(wàn)分感謝
2013-10-26 17:29:46
labview中,去哪下載卡爾曼濾波器工具包,能給個(gè)網(wǎng)址么?謝謝了~~~~~
2013-12-16 15:44:09
libview中想用卡爾曼濾波方式,但找不到怎么辦
2018-05-18 09:33:53
最近想做四軸飛行器,在論壇看到這個(gè)帖子MikroKopter:來(lái)自德國(guó)的開(kāi)源四軸飛行器項(xiàng)目bbs.elecfans.com/jishu_475743_1_1.html小弟看過(guò)之后對(duì)其中有些內(nèi)容不太了解,四軸飛行器不是卡爾曼濾波最好嗎?這個(gè)mikrokopter的代碼是不是用的卡爾曼濾波器?
2015-06-11 17:27:38
因?yàn)?b class="flag-6" style="color: red">有其他力引入會(huì)造成隊(duì)伍,故只用來(lái)進(jìn)行水平姿態(tài)的測(cè)量)具體的模型建立可以參考這一篇論文我的理解我重點(diǎn)說(shuō)一下論文里的模型的特點(diǎn)。首先模型是一個(gè)2維模型,故在寫(xiě)程序的時(shí)候需要先把卡爾曼濾波的五個(gè)方程用
2015-06-12 15:11:05
前一段時(shí)間看到一篇論文,里面有一部分講解卡爾曼濾波,感覺(jué)講的挺簡(jiǎn)單易懂的,現(xiàn)在分享一下只講不分享不是真漢紙!!這里有卡爾曼濾波器simulink模型,這里作為濾波器用。如果改變一些參數(shù),也可以做辨識(shí)用。一碼多用,朋友們要記得回復(fù)啊~
2015-06-05 15:26:39
看到的一篇關(guān)于卡爾曼濾波的講座PPT,比看純課本有條理的多,現(xiàn)在分享給大家,共同進(jìn)步哦
2015-06-11 17:46:14
本篇博客講解了一階卡爾曼濾波原理、ADC讀取紅外測(cè)距傳感器的cube配置和代碼實(shí)現(xiàn),運(yùn)用了均值濾波。
2022-01-11 06:09:12
二階濾波對(duì)比卡爾曼濾波輸出哪個(gè)效果更好
2023-10-13 08:21:28
什么是卡爾曼濾波?具有哪些參數(shù)?
2021-09-30 08:50:30
估計(jì)很多使用mpu6050的人看網(wǎng)上卡爾曼濾波資料時(shí)看不懂下面這段程序,我找到一個(gè)資料,對(duì)其進(jìn)行了解釋。P[0][0] += dt * (dt*P[1][1] - P[0][1] - P[1][0
2017-03-25 21:07:57
我直接將MPU6050的加速度的值放入卡爾曼函數(shù)中進(jìn)行濾波,結(jié)果濾波之后的波形和沒(méi)濾波的波形不在一塊,這是為什么?那么我該怎么做(如圖)。我使用的是STM32F407的開(kāi)發(fā)板。請(qǐng)問(wèn)大佬有沒(méi)有STM32F407的MPU6050的卡爾曼濾波程序,不要融合之后的程序,只想要直接對(duì)加速度濾波后的程序。謝謝。
2018-05-10 23:54:38
`看到有人說(shuō)互補(bǔ)濾波跟卡爾曼濾波效果差不多,我是不相信的。不過(guò)單我自己說(shuō)不行,要有結(jié)果,后來(lái)我就用下面的代碼進(jìn)行測(cè)試,結(jié)果如下圖結(jié)果:果然兩濾波結(jié)果幾乎相同。黑色曲線是互補(bǔ)濾波結(jié)果,黃色曲線是卡爾曼
2015-06-12 14:54:03
網(wǎng)上搜到一篇關(guān)于卡爾曼濾波算法的論文,對(duì)低維卡爾曼濾波算法作了幾何解釋,這種解釋對(duì)卡爾曼濾波有一種直觀的理解,使人們對(duì)卡爾曼濾波有更本質(zhì)的認(rèn)識(shí)。有需要的童鞋帶走吧
2015-06-11 15:28:33
://blog.csdn.net/u011344545==========================================本文設(shè)計(jì)了一種基于STM32/51單片機(jī)的使用MPU6050傳感器的利用卡爾曼濾波器算法的角度測(cè)量?jī)x(直接上代碼)代碼下載(附PPT)MPU-6050 :是6軸運(yùn)動(dòng)處理
2022-02-10 07:57:19
卡爾曼濾波實(shí)現(xiàn)簡(jiǎn)單,濾波效果好 ,下面分享一個(gè)基于卡爾曼濾波的matlab算法,數(shù)據(jù)全部為一維狀態(tài),本人彌補(bǔ)的詳細(xì)備注,供愛(ài)好者研究學(xué)習(xí)。%%%%%%%%%%%%%%%%%%%功能說(shuō)明:Kalman
2019-08-01 04:35:51
如何去實(shí)現(xiàn)一種基于MPU6050及卡爾曼濾波的平衡小車(chē)呢?有哪些資料呢?
2021-11-19 06:48:02
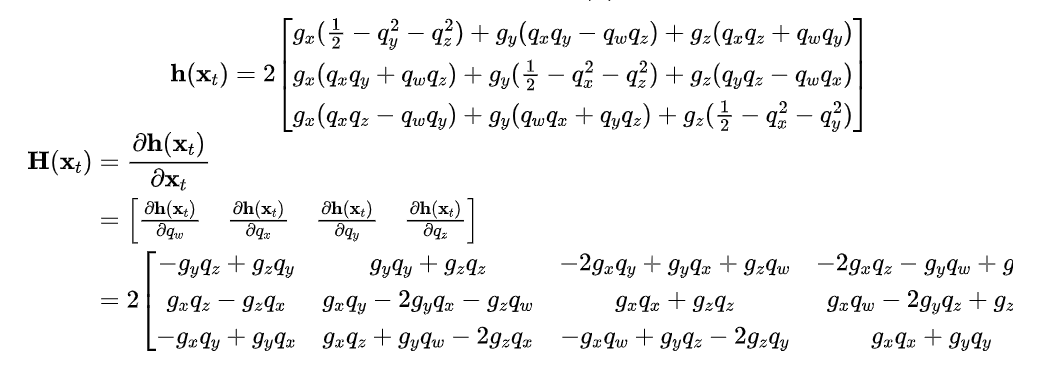
用卡爾曼濾波處理四元數(shù),以前用過(guò)單變量的卡爾曼濾波,但是這一次需要處理四個(gè)變量,有些不太清楚了,有做過(guò)的壇友指教一下原理和公式~~下面是我四元數(shù)的后半部分程序:// integrate
2015-05-22 15:12:20
如何改進(jìn)基于Sage-Husa的自適應(yīng)卡爾曼濾波?
2021-11-22 07:35:35
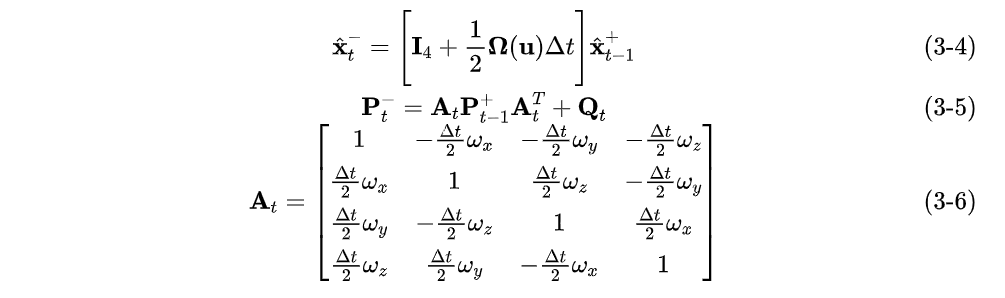
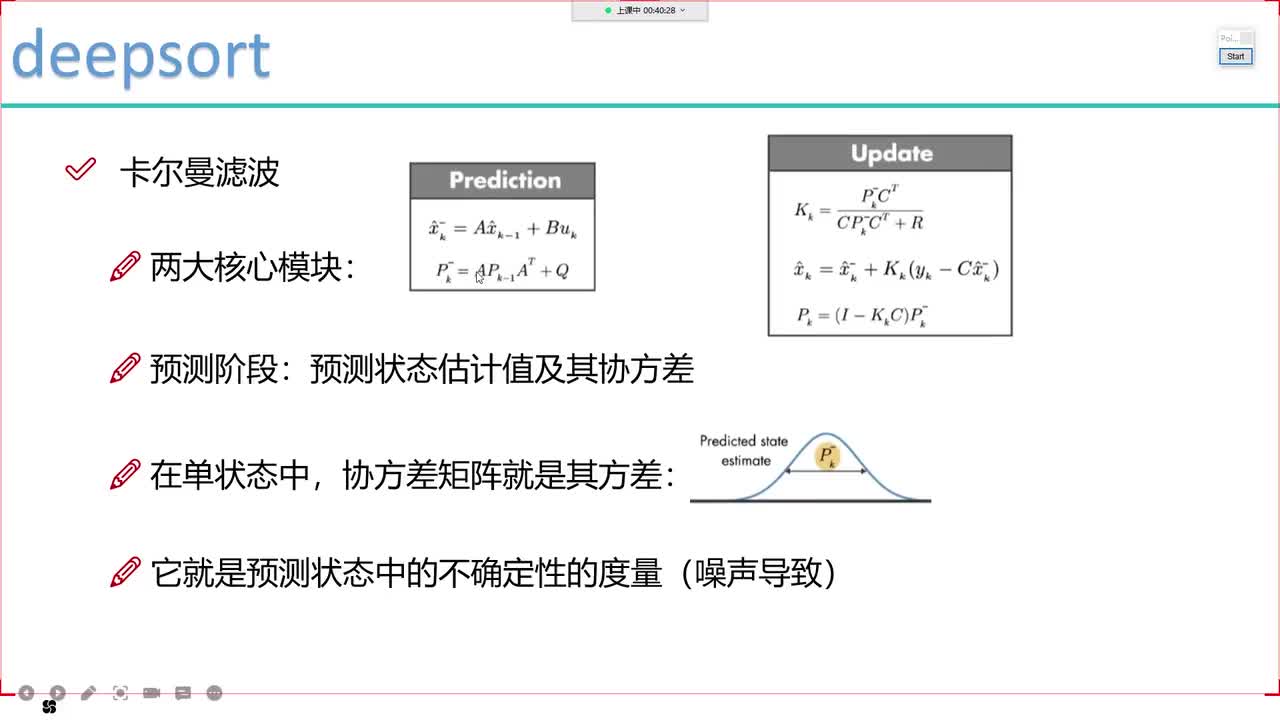
(k-1|k-1)對(duì)應(yīng)的covariance,A’表示A的轉(zhuǎn)置矩陣,Q是系統(tǒng)過(guò)程的covariance。式子1,2就是卡爾曼濾波器5個(gè)公式當(dāng)中的前兩個(gè),也就是對(duì)系統(tǒng)的預(yù)測(cè)。現(xiàn)在我們有了現(xiàn)在狀態(tài)的預(yù)測(cè)結(jié)果
2015-05-22 10:47:54
急求卡爾曼濾波c程序 ?? 有哪位大神知道 指點(diǎn)下!
2013-10-25 21:47:49
有一組周期性的數(shù)據(jù),計(jì)劃通過(guò)小波分析去除噪聲,卡爾曼濾波進(jìn)行預(yù)測(cè)去除偶然的晃動(dòng),具體內(nèi)容協(xié)商,有償。
2018-08-23 17:29:53
有沒(méi)有基于9軸傳感器的三階卡爾曼濾波器算法
2023-11-06 06:00:44
哪位大神對(duì)無(wú)跡卡爾曼濾波研究的比較透徹,想請(qǐng)教幾個(gè)問(wèn)題。求指導(dǎo)
2016-03-14 21:15:47
找了很多關(guān)于平方根卡爾曼濾波的論文,算法看不懂,運(yùn)用LabVIEW不知道從何下手,求助用LabVIEW編寫(xiě)平方根卡爾曼濾波程序的編寫(xiě)過(guò)程,截圖也可以,小生在此謝謝了!!!{:soso_e183
2012-10-08 21:21:30
卡爾曼濾波有什么用,怎么用?電調(diào)有什么用?小白,剛接觸四軸不懂。求大神解答
2019-04-18 01:12:59
如題,四軸解算的卡爾曼濾波、互補(bǔ)濾波、四元數(shù)都是什么。有沒(méi)有知道的或者說(shuō)的很清楚的文章。minifly是用的什么解算?我看有的人即用卡爾曼又用互補(bǔ)濾波是可以嗎?
2019-07-03 02:25:10
求對(duì)“加速度計(jì)(mpu6000)數(shù)據(jù)進(jìn)行的卡爾曼濾波C代碼”,看了好久的卡爾曼濾波原理,不堪其擾~~只想把代碼移植到自己的飛控上,讓加速度的數(shù)據(jù)更加可靠。望大神分享~~
2019-07-09 04:36:01
課設(shè)題目:轉(zhuǎn)換測(cè)量卡爾曼濾波器的設(shè)計(jì)與實(shí)現(xiàn)--- 其中的 “轉(zhuǎn)換測(cè)量“是什么意思啊?基于matlab的。各位朋友能否具體講解下,舉個(gè)例子闡釋什么的。這個(gè)課設(shè)題目要求我在matlab上用卡爾曼濾波
2013-01-15 12:29:16
Approach toLinear Filtering and Prediction Problems》(線性濾波與預(yù)測(cè)問(wèn)題的新方法中提出了這種算法。簡(jiǎn)單來(lái)說(shuō),卡爾曼濾波器是一個(gè)“optimal recursive
2016-06-17 14:59:09
卡爾曼濾波器可以從數(shù)據(jù)序列中排除干擾噪聲,使用卡爾曼濾波器可以從不完整的信息給出一個(gè)不斷變化中復(fù)雜系統(tǒng)的最優(yōu)估計(jì)。我們把某種網(wǎng)絡(luò)抽象為一個(gè)電阻,現(xiàn)在我們要用傳感器(當(dāng)然不是簡(jiǎn)單的萬(wàn)用表歐姆檔測(cè)電阻哈
2019-05-22 07:06:05
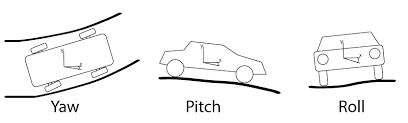
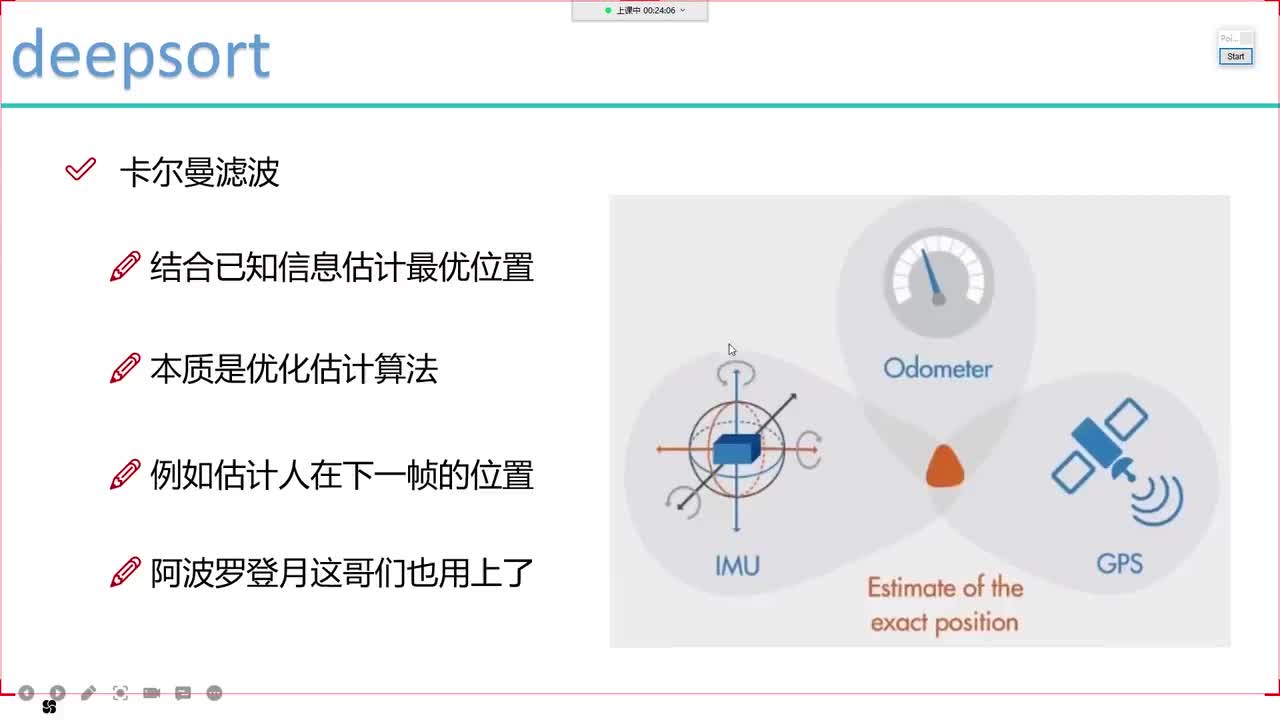
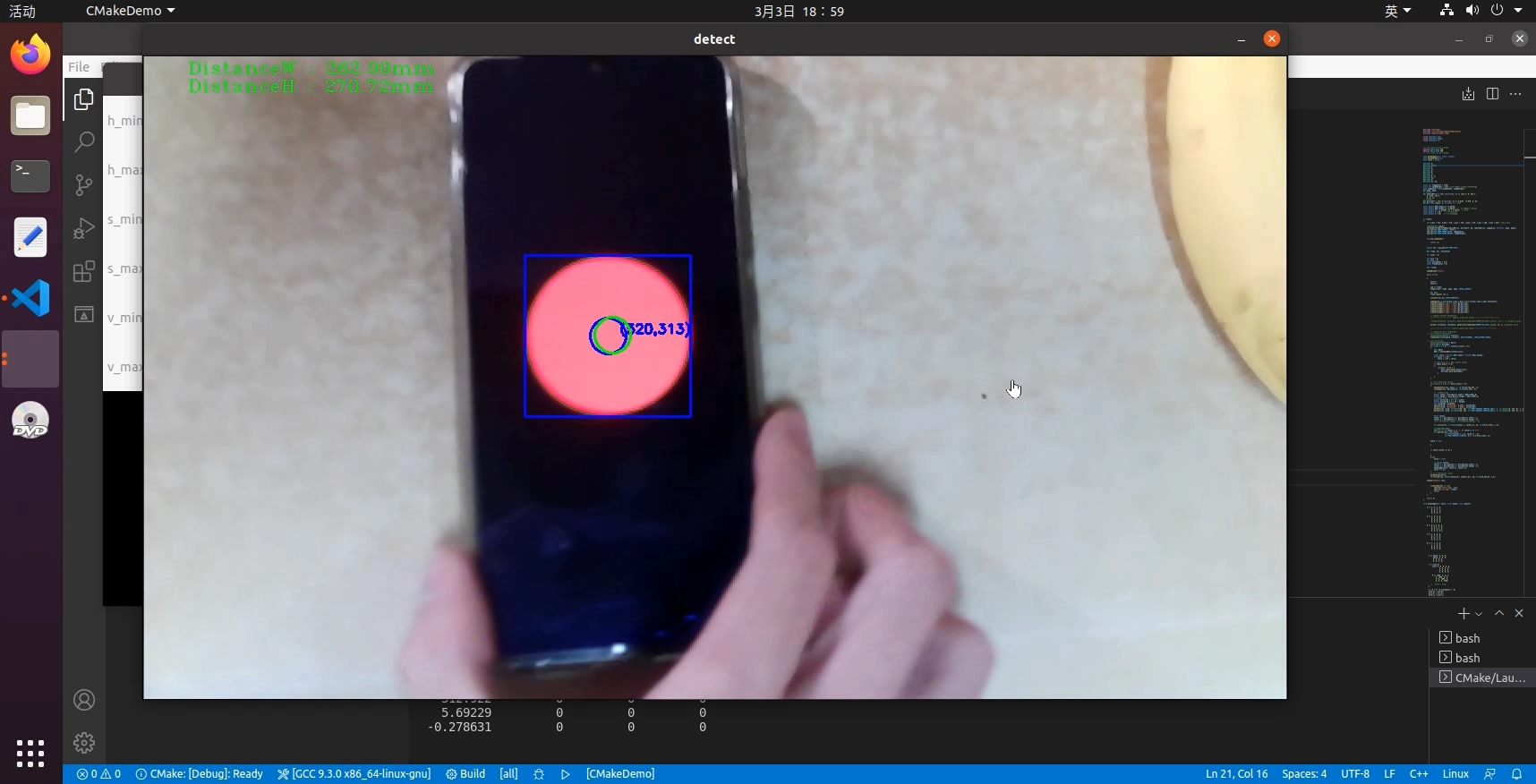
**卡爾曼濾波**自從1960被Kalman發(fā)明并應(yīng)用到阿波羅登月計(jì)劃之后一直經(jīng)久不衰,直到現(xiàn)在也被機(jī)器人、自動(dòng)駕駛、飛行控制等領(lǐng)域應(yīng)用。基礎(chǔ)卡爾曼濾波只能對(duì)線性系統(tǒng)建模;擴(kuò)展卡爾曼濾波對(duì)非線性方程做線性近似以便將卡爾曼濾波應(yīng)用到非線性系統(tǒng)。
2023-02-13 10:03:32 502
502 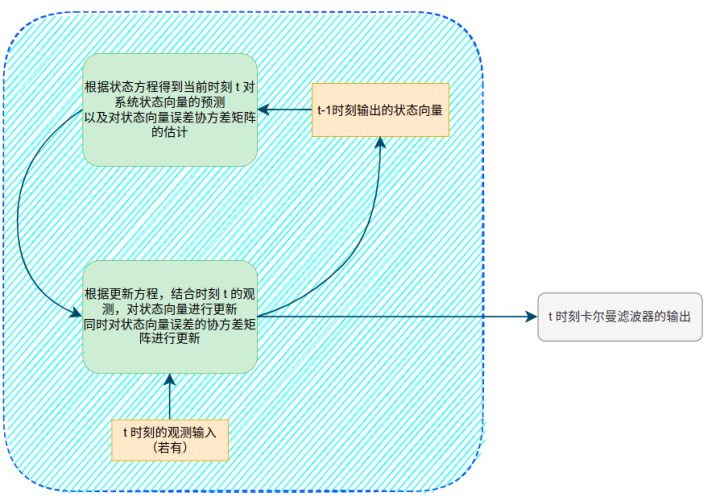
**卡爾曼濾波**自從1960被Kalman發(fā)明并應(yīng)用到阿波羅登月計(jì)劃之后一直經(jīng)久不衰,直到現(xiàn)在也被機(jī)器人、自動(dòng)駕駛、飛行控制等領(lǐng)域應(yīng)用。基礎(chǔ)卡爾曼濾波只能對(duì)線性系統(tǒng)建模;擴(kuò)展卡爾曼濾波對(duì)非線性方程做線性近似以便將卡爾曼濾波應(yīng)用到非線性系統(tǒng)。
2023-02-13 10:05:40547 
**卡爾曼濾波**自從1960被Kalman發(fā)明并應(yīng)用到阿波羅登月計(jì)劃之后一直經(jīng)久不衰,直到現(xiàn)在也被機(jī)器人、自動(dòng)駕駛、飛行控制等領(lǐng)域應(yīng)用。基礎(chǔ)卡爾曼濾波只能對(duì)線性系統(tǒng)建模;擴(kuò)展卡爾曼濾波對(duì)非線性方程做線性近似以便將卡爾曼濾波應(yīng)用到非線性系統(tǒng)。
2023-02-13 10:05:57883 
 電子發(fā)燒友App
電子發(fā)燒友App















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論