 電子發(fā)燒友App
電子發(fā)燒友App


單光子雪崩二極管以其極高的光子靈敏度以及超快的響應(yīng)時間在各領(lǐng)域被廣泛應(yīng)用。隨著半導(dǎo)體技術(shù)的發(fā)展,集成多個像素以及時間測量電路的單光子雪崩二極管陣列逐漸普及。成像是一種以光子作為媒介獲取目標(biāo)物體信息的手段,基于單光子雪崩二極管的成像系統(tǒng)可以利用更豐富的光子計數(shù)以及光子時間信息實現(xiàn)極端環(huán)境下的目標(biāo)探測。單光子雪崩二極管陣列具備并行采集光子信息的能力,進(jìn)一步提高了光子信息的探測效率,能夠替代傳統(tǒng)單光子成像中單點探測器加掃描結(jié)構(gòu)的探測體系,推動生物顯微成像、散射成像以及非視域成像等技術(shù)的進(jìn)步。
據(jù)麥姆斯咨詢報道,近期,北京航空航天大學(xué)的科研團(tuán)隊在《光子學(xué)報》期刊上發(fā)表了以“基于單光子雪崩二極管陣列的成像技術(shù)研究進(jìn)展(特邀)”為主題的文章。該文章第一作者和通訊作者為孫鳴捷教授,主要從事研究方向為先進(jìn)成像技術(shù)的研究工作。
本文梳理了單光子雪崩二極管陣列的發(fā)展歷程以及技術(shù)趨勢,按照是否需要光子時間信息分類介紹了單光子雪崩二極管陣列在成像方面的典型應(yīng)用,結(jié)合應(yīng)用分析了單光子雪崩二極管陣列相比于其他探測器的優(yōu)勢,對單光子雪崩二極管陣列的應(yīng)用前景進(jìn)行了展望。
SPAD陣列的發(fā)展歷程與技術(shù)趨勢
SPAD陣列的發(fā)展歷程可大致總結(jié)為由單個雪崩光電二極管,到具備一定功能的像素,再到集成度較高的像素陣列。SPAD在探測到單個光子后,其自發(fā)性的雪崩過程需要被及時終止以避免持續(xù)高電流對器件的損壞,隨后SPAD上的反向偏壓會逐漸回升并使SPAD再次回到待命狀態(tài)。上述淬火與充能過程的持續(xù)時間即為SPAD的死時間(Dead Time),這期間SPAD無法探測光子。結(jié)合淬火電路的SPAD即可構(gòu)成最簡單的SPAD像素,此類像素的輸出僅為與光子入射所對應(yīng)的一系列電脈沖,更復(fù)雜的SPAD像素還可能具備光子計數(shù)功能或時間相關(guān)光子探測功能。目前,單個SPAD像素的光子探測概率(PDP)可達(dá)70%。
光子時間測量電路也是SPAD像素中的重要組成部分,決定了SPAD的光子時間探測性能。值得一提的是,即使不借助時間測量電路,一些工作在光子計數(shù)模式下的高速SPAD也能夠以μs級別的精度區(qū)分微弱光強(qiáng)的變化,但無法精確測量光子飛行時間。應(yīng)用在SPAD像素中的精確光子時間測量方案主要包括時間相關(guān)光子計數(shù)(TCSPC)技術(shù)以及時間門控(TG)技術(shù)。TCSPC能夠以ps級別的精度測量光子的到達(dá)時間,但需要較復(fù)雜的時間數(shù)字轉(zhuǎn)換(TDC)電路。具備TCSPC功能的SPAD像素一般只有很低的填充因子(感光區(qū)域的面積在整個像素中所占的比例)。時間門控技術(shù)利用時間門控電路使得SPAD僅在某個特定的時間窗口內(nèi)(一般為ns量級)被激活,該時間窗口能夠以ps的間隔移動并覆蓋整個探測周期。相比于TCSPC技術(shù),時間選通門控方案結(jié)構(gòu)簡單,成本更低,非常適用于大像素規(guī)模的SPAD陣列。
當(dāng)像素內(nèi)的電路被確定之后,可以將多個SPAD像素集成為陣列,以獲得并行的光子探測能力。面陣SPAD需要在像素內(nèi)附加電路來實現(xiàn)光子信息的獲取、存儲和傳輸,額外的電路會占據(jù)像素內(nèi)空間從而降低填充因子。較低的填充因子會導(dǎo)致面陣SPAD的光子探測效率(PDE)下降,但面陣SPAD無需掃描即可獲得二維圖像。SPAD最早主要通過定制工藝進(jìn)行制造,可以針對性地優(yōu)化光敏單元結(jié)構(gòu)或摻雜濃度從而改善SPAD的PDP以及噪聲表現(xiàn),但這類SPAD的可擴(kuò)展性通常較差。2003年,利用標(biāo)準(zhǔn)CMOS工藝制造的8×4像素SPAD陣列被首次報道。盡管基于標(biāo)準(zhǔn)CMOS工藝制造的SPAD在綜合性能表現(xiàn)上還不夠理想,但標(biāo)準(zhǔn)CMOS工藝可以將光敏單元與附加電路進(jìn)行大規(guī)模集成,使SPAD陣列能夠集成更多的像素并有更豐富的光子探測功能。
近年來隨著工藝的進(jìn)步以及設(shè)計的優(yōu)化,SPAD陣列的綜合性能表現(xiàn)有了顯著提升。目前最新的SPAD陣列,PDE最高可達(dá)70%,暗計數(shù)率(DCR)可降至0.1 cps/μm2以下,同時像素規(guī)模可達(dá)百萬量級。SPAD像素中的附加電路也在不斷發(fā)展,可以在SPAD陣列上集成更為復(fù)雜的電路系統(tǒng)。目前先進(jìn)的SPAD陣列可同時具備光子計數(shù)功能以及光子時間測量功能,潛在的應(yīng)用場景更加豐富。在大量應(yīng)用于科學(xué)研究的同時,SPAD陣列的產(chǎn)品化進(jìn)程也在不斷推進(jìn),半導(dǎo)體廠商索尼已經(jīng)推出了面向自動駕駛領(lǐng)域的高分辨率、低成本、小體積的商用SPAD陣列。表1中總結(jié)了近年來具有代表性的SPAD陣列的主要性能指標(biāo)。
表1 近年來SPAD陣列的主要性能指標(biāo)概覽
隨著SPAD陣列在性能上的不斷發(fā)展與成熟,在一些應(yīng)用場景中SPAD陣列已經(jīng)開始逐漸取代ICCD與條紋相機(jī)等昂貴的陣列式單光子探測器,但SPAD陣列在探測效率、暗計數(shù)、均勻性以及時間分辨能力等指標(biāo)上還有進(jìn)一步優(yōu)化的空間。SPAD像素的PDP與DCR主要與光敏單元有關(guān),受制造工藝、PN結(jié)的結(jié)構(gòu)以及反偏電壓等因素的影響。提升PDP的主要思路是提高光生載流子引發(fā)雪崩的概率,具體途徑為提升耗盡層中電場的強(qiáng)度。高場強(qiáng)要求較高的反偏電壓以及比較薄的耗盡層,但高電壓會帶來高功耗,且較薄的耗盡層會導(dǎo)致光敏區(qū)域變小,影響整體的探測效率。另外基于標(biāo)準(zhǔn)CMOS工藝的SPAD會有相對較多的晶格缺陷,從而導(dǎo)致光生載流子被束縛,無法引發(fā)雪崩。暗計數(shù)的主要來源是SPAD耗盡層內(nèi)由于熱效應(yīng)或隧道效應(yīng)而產(chǎn)生的自由載流子,影響暗計數(shù)的主要因素包括PN結(jié)中晶格的缺陷、雜質(zhì)以及摻雜濃度等。
使用標(biāo)準(zhǔn)CMOS工藝制造的SPAD陣列,其缺陷以及雜質(zhì)含量相對較多,比定制工藝SPAD會有更高的暗計數(shù)。優(yōu)化SPAD暗計數(shù)的方法包括優(yōu)化PN結(jié)的結(jié)構(gòu),添加吸附雜質(zhì)的工藝步驟以提高PN結(jié)質(zhì)量等,另外降低反向偏壓與光敏區(qū)面積都有利于抑制暗計數(shù),但這也會導(dǎo)致PDE的下降。針對光敏單元中各項性能參數(shù)之間的相互制約,可以使用更先進(jìn)的復(fù)合工藝開發(fā)性能均衡的SPAD光敏單元,例如BCD工藝。SPAD的死時間以及時間測量精度主要取決于像素中的附加電路。通過對淬火電路的優(yōu)化可以將SPAD的死時間降低至ns以下且不引入額外的噪聲,還可以通過淬火電路控制反偏電壓以降低功耗或補(bǔ)償SPAD陣列中各像素的不均勻性。SPAD像素中的TDC決定了光子時間測量能力,但高性能的TDC一般都有更高的功耗和更大的電路面積。考慮到弱光環(huán)境下SPAD陣列中單個像素的光子探測率比較低,因此可以在多個SPAD像素間共享TDC,可以在保證性能的同時顯著降低電路面積與功耗。高性能的附加電路能夠顯著優(yōu)化SPAD陣列的探測頻率以及時間分辨率,但往往這類電路會有更復(fù)雜的結(jié)構(gòu)和更多的晶體管,對光敏區(qū)域的面積會有一定的限制。
由以上分析可知,在SPAD陣列的設(shè)計與制造過程中,尤其是對于大規(guī)模的SPAD陣列,性能、體積、功耗以及成本等因素會相互制約。設(shè)計者可以針對應(yīng)用場景對SPAD陣列的各項性能指標(biāo)進(jìn)行適當(dāng)權(quán)衡,例如一種為時間相關(guān)單光子成像而設(shè)計的SPAD陣列重點優(yōu)化了PDE以及時間分辨能力。該SPAD陣列的峰值PDE達(dá)到70%,同時集成了時間分辨率為6 ps的TDC,使得該陣列在弱光環(huán)境下也能夠采集到精確的時間相關(guān)光子數(shù)據(jù)。但該陣列的噪聲表現(xiàn)相對較差,暗計數(shù)達(dá)到1 kcps。另外,微透鏡技術(shù)以及3D電路堆疊技術(shù)可以有效解決SPAD陣列中填充因子與附加電路之間的矛盾。安裝在SPAD像素上的微透鏡能夠?qū)⑷肷涔庾泳劢怪料袼貎?nèi)的光敏區(qū)域,在不影響像素結(jié)構(gòu)的情況下可以使等效填充因子得到成倍提升。
3D電路堆疊技術(shù)可以將SPAD光敏單元與附加電路在兩塊基板上分別制造并將二者集成,從而克服填充因子與附加電路之間的矛盾。3D電路堆疊技術(shù)還能夠?qū)⒒诙ㄖ乒に嚨母咝阅躍PAD與易集成的CMOS附加電路相結(jié)合,若能解決3D電路堆疊技術(shù)的成本以及設(shè)計復(fù)雜度等問題,該技術(shù)將會是未來高性能SPAD陣列的有效解決方案。在電路設(shè)計層面,數(shù)值仿真手段的進(jìn)步也使人們可以在SPAD設(shè)計階段通過仿真的方法預(yù)測并優(yōu)化PDP等性能參數(shù),在具備較高可靠性的同時還降低了設(shè)計階段的成本。隨著SPAD像素規(guī)模的不斷增大,大量光子數(shù)據(jù)的存儲、處理與傳輸也將會是一個難題,利用高性能FPGA進(jìn)行光子數(shù)據(jù)的本地預(yù)處理可以有效降低數(shù)據(jù)存儲量,減輕后續(xù)與計算機(jī)之間的數(shù)據(jù)傳輸壓力。
隨著工藝、材料以及電路設(shè)計的進(jìn)步,未來性能均衡、成本低廉的SPAD陣列將有望得到普及。目前基于CMOS的SPAD像素在性能接近或超越定制工藝SPAD的同時還具備大規(guī)模集成的潛力。2022年報道了一種基于標(biāo)準(zhǔn)180 nm工藝的SPAD像素,峰值PDP達(dá)到55%,時間抖動最低為12.1 ps,死時間低至3 ns且最低暗計數(shù)為0.06 cps/μm2。目前該SPAD像素還并未形成足夠規(guī)模的SPAD陣列,如何在性能不退化的前提下將這類高性能SPAD像素進(jìn)行集成是未來仍需要解決的問題。
基于SPAD陣列高速單光子探測能力的成像技術(shù)
在一些不需要精確光子時間信息的成像應(yīng)用中,SPAD陣列能夠以光子計數(shù)模式工作并以極高的幀率獲取二維單光子圖像,這使得SPAD陣列在弱光環(huán)境下的成像性能非常出色。在一些典型的弱光成像應(yīng)用中,例如生物醫(yī)學(xué)顯微成像,SPAD陣列得到了廣泛應(yīng)用并在成像速度、圖像信噪比等方面取得了新的突破。
超分辨生物顯微成像
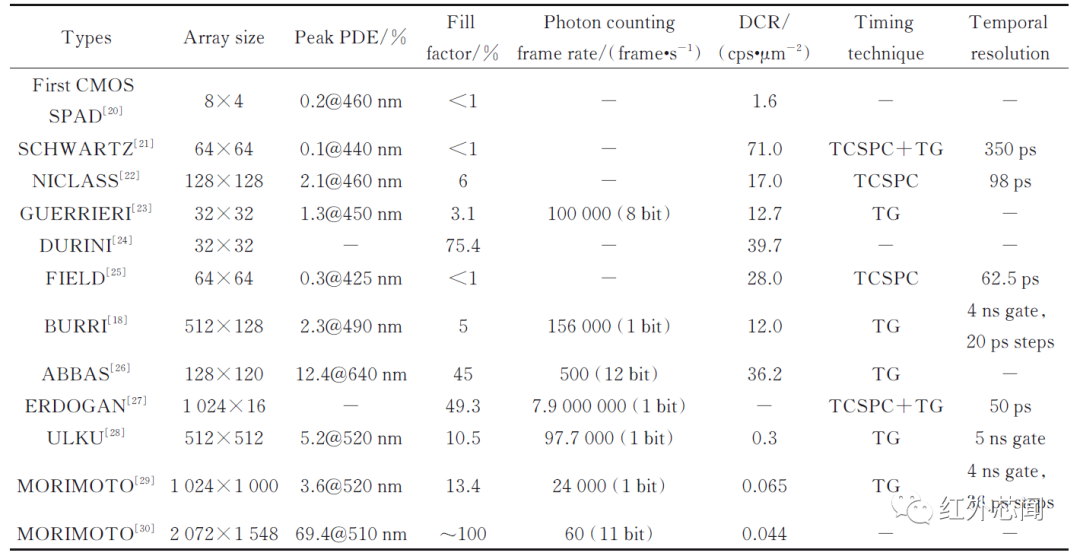
傳統(tǒng)生物顯微成像的分辨率一般被限制在衍射極限內(nèi),如何突破衍射極限獲取高分辨圖像一直是研究人員關(guān)注的熱點。實現(xiàn)超分辨顯微成像的一種方法是通過對生物組織中單個熒光分子進(jìn)行精準(zhǔn)的定位,即單分子定位超分辨顯微成像技術(shù)(SMLM)。SPAD陣列能夠以極高的幀率探測單個光子,且不受讀出噪聲的影響,為實現(xiàn)更高速、更高精度的SMLM提供了可能。
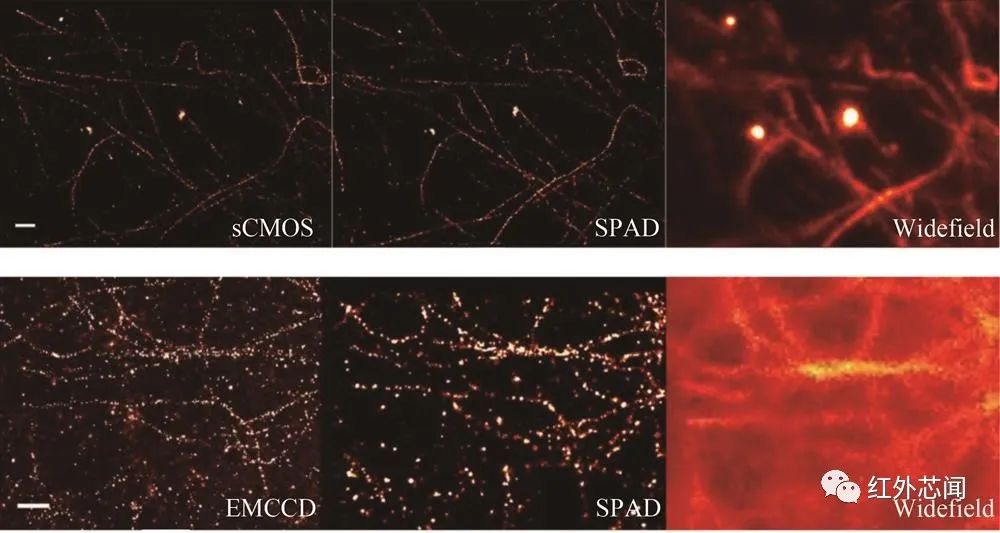
圖1 sCMOS、SPAD陣列、EMCCD的超分辨成像結(jié)果與衍射受限成像結(jié)果的對比
與EMCCD以及sCMOS等探測器相比,目前SPAD陣列在像素規(guī)模、像素填充因子以及探測效率等方面還有待提高。隨著微透鏡技術(shù)的普及與先進(jìn)制程CMOS工藝的應(yīng)用,SPAD陣列的空間分辨率及光子探測效率將不斷提升。未來SPAD陣列有望替代現(xiàn)有的EMCCD與sCMOS,為揭示納米尺度下細(xì)胞的精細(xì)結(jié)構(gòu)提供有力的工具。
散射關(guān)聯(lián)成像
無損地監(jiān)控生物組織深層結(jié)構(gòu)的動態(tài)變化是一項非常有挑戰(zhàn)性的任務(wù),同時在很多應(yīng)用場景中具有實際意義,例如在臨床醫(yī)學(xué)中實時監(jiān)測大腦的血流量。散射關(guān)聯(lián)頻譜成像技術(shù)(DCS)是一種很有潛力的無損光學(xué)監(jiān)測技術(shù)。DCS將相干光耦合至目標(biāo)物體中,通過測量出射散斑的時間相關(guān)性來監(jiān)測深層組織的動態(tài)變化情況。SPAD陣列的高靈敏度和高幀率能夠有效地探測來自深層組織的散射光子,同時能夠以較高的時間分辨率監(jiān)測散斑的動態(tài)變化情況。另外SPAD陣列的多個像素能夠并行地測量多個散斑,進(jìn)一步提升信噪比。
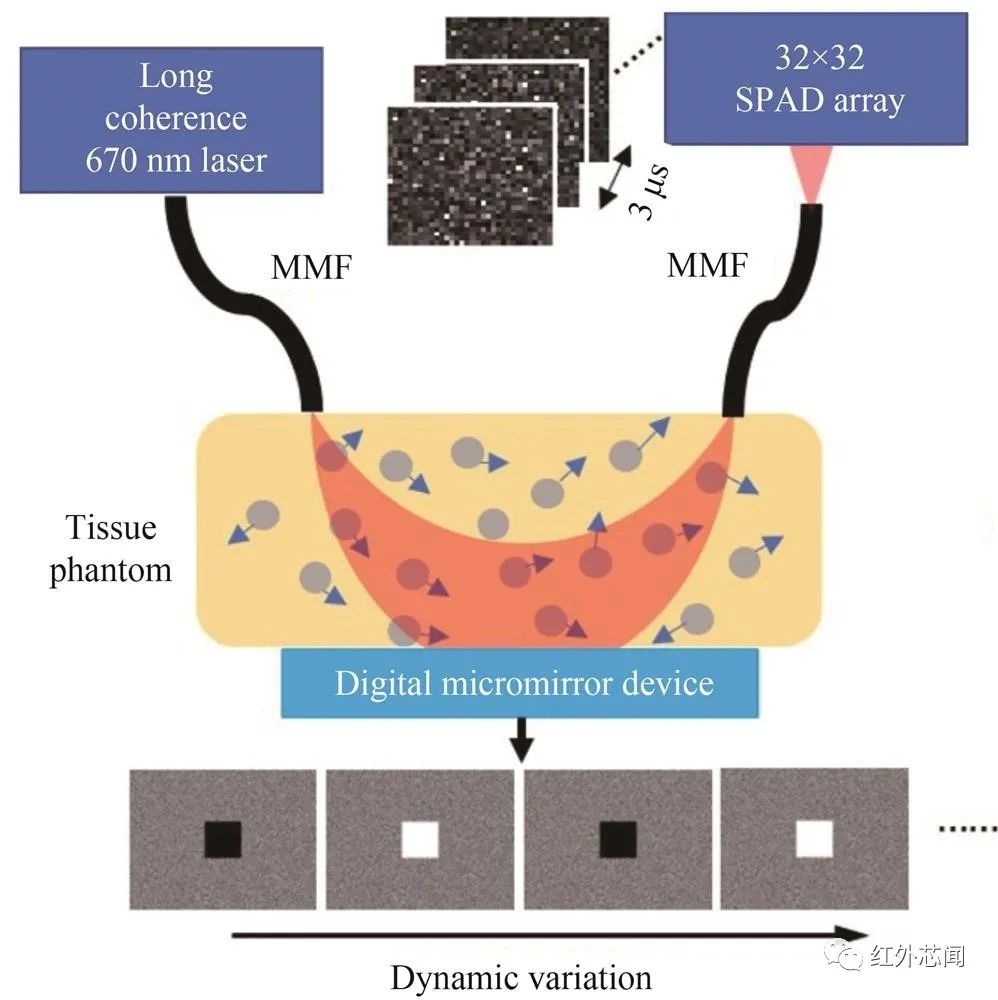
圖2 基于SPAD陣列的DCS系統(tǒng)示意圖
隨著SPAD陣列集成技術(shù)的進(jìn)一步發(fā)展,超大像素規(guī)模的SPAD陣列也已經(jīng)出現(xiàn),這些新的設(shè)備在DCS中的應(yīng)用將會進(jìn)一步提高信噪比與成像速度。另外,近紅外生理窗口(650~950 nm)波段的光在生物組織中的穿透性較強(qiáng),通過針對性的設(shè)計或基底材料的優(yōu)化可以提高SPAD在該波段的光子探測概率,進(jìn)而有效提升DCS的探測深度。SPAD陣列還可能結(jié)合FPGA直接進(jìn)行快速的散斑自相關(guān)運(yùn)算,可以顯著地提升系統(tǒng)集成度與成像速度,將有望實現(xiàn)DCS無損探測設(shè)備的產(chǎn)品化和小型化,推動DCS技術(shù)在實際臨床診斷中的普及。
高動態(tài)范圍成像
傳統(tǒng)的圖像傳感器例如電荷耦合器件(CCD)或CMOS等基本都是線性響應(yīng)的,即光電荷數(shù)量與入射光強(qiáng)成正比。線性響應(yīng)傳感器在強(qiáng)光下很容易達(dá)到飽和,當(dāng)單幀圖像曝光時間內(nèi)的累積的光電荷達(dá)到飽和時,后續(xù)所有入射的光子都將被忽略。SPAD陣列工作在蓋革模式下,在單個光子探測事件之后需要一定的時間(死時間)才能重新回到光子探測狀態(tài)。SPAD在整個曝光過程中都能探測光子,但最高光子計數(shù)頻率與死時間相關(guān)。
圖3 傳統(tǒng)相機(jī)與SPAD陣列在高動態(tài)范圍場景下的成像結(jié)果
雖然目前SPAD陣列的空間分辨率較低,需要結(jié)合掃描裝置或額外的圖像信息才能獲得高質(zhì)量的高動態(tài)范圍圖像,但目前傳統(tǒng)成像設(shè)備的性能還難以滿足自動駕駛、目標(biāo)識別等領(lǐng)域中對高動態(tài)范圍場景成像的需求,未來隨著高分辨率SPAD陣列成本的不斷降低,SPAD陣列有望推動高動態(tài)范圍成像在各領(lǐng)域中的普及。由于高動態(tài)范圍成像主要對SPAD的光子計數(shù)頻率有比較高的要求,因此可以對SPAD像素中的淬火電路以及后續(xù)信號讀出電路進(jìn)行針對性的優(yōu)化,提高SPAD陣列的最高光子計數(shù)頻率,同時可以舍棄TDC等時間測量電路以提高填充因子并降低大規(guī)模制造的成本。SPAD陣列一般常用于弱光場景中,基于SPAD陣列的高動態(tài)范圍成像研究為SPAD陣列開辟了一個全新的應(yīng)用領(lǐng)域,具有重要的研究價值和廣闊的發(fā)展前景。
基于光子飛行時間的成像技術(shù)
SPAD陣列與時間測量電路的集成,例如TDC與時間門控電路,使得SPAD陣列在具備單光子探測能力的同時還能夠精確測量光子的飛行時間(ToF),從而實現(xiàn)對高速物體的追蹤或者是拓展成像的維度。在這類需要測量光子飛行時間的應(yīng)用中,一般需要在SPAD陣列和高重頻脈沖光源之間建立時序同步以確定光子飛行時間的計時基準(zhǔn)。
熒光壽命顯微成像
熒光顯微成像被廣泛應(yīng)用于生物醫(yī)學(xué)領(lǐng)域,熒光光強(qiáng)、偏振度以及熒光壽命等參數(shù)都可以用于圖像的生成。熒光壽命不容易受到光漂白、激發(fā)光強(qiáng)以及熒光分子濃度等因素的影響,因此熒光壽命顯微成像(FLIM)可以比較精確地區(qū)分不同來源的熒光信號。熒光壽命對外界環(huán)境變化以及分子間相互作用比較敏感,經(jīng)常被用于對生物大分子結(jié)構(gòu)、動力學(xué)信息和細(xì)胞微環(huán)境等進(jìn)行精確測量與定量分析。帶有時間選通門控電路或TCSPC的SPAD可實現(xiàn)對熒光壽命的高精度測量,然而基于單點SPAD的FLIM成像需要對視場進(jìn)行掃描,成像速度有限。寬視場FLIM則是直接使用陣列式探測器采集視場中的熒光信息,成像速度得到顯著提升。近年來具備時間測量能力的SPAD陣列促進(jìn)了寬視場FLIM的迅速發(fā)展與應(yīng)用。
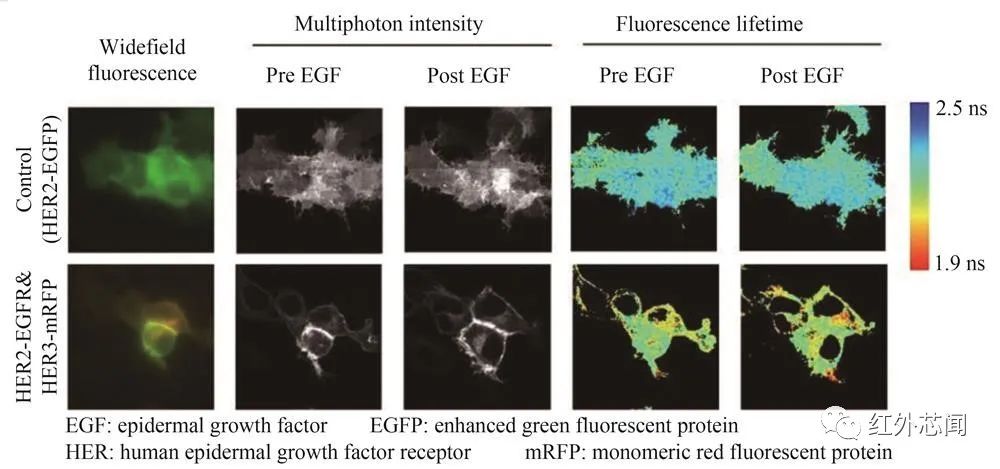
圖4 基于SPAD陣列的寬視場熒光壽命成像與熒光強(qiáng)度成像的對比
雖然大部分基于SPAD陣列的寬視場FLIM成像在空間分辨率、信噪比等方面還無法超越單點掃描FLIM成像,但寬視場FLIM具有很高的成像幀率,對生物樣本的光損傷也相對較低,能對活細(xì)胞或是生物組織進(jìn)行實時監(jiān)測,在細(xì)胞分子動力學(xué)研究中有廣闊的應(yīng)用前景。未來適用于寬視場FLIM成像的SPAD陣列需要在保持較高的成像分辨率與幀率的情況下限制功耗并提升探測效率。理論上在SPAD陣列中的每個像素內(nèi)都集成TDC能夠提供最高的光子時間測量容量,可以改善信噪比與成像幀率,但是這會影響填充因子并導(dǎo)致較高的功耗。使用多像素共享TDC的方案可以緩解性能與功耗之間的相互制約,但是需要根據(jù)成像場景的光通量設(shè)置合適的共享TDC數(shù)量,以保證信噪比和幀率不受影響。另外,高分辨與高幀率的FLIM成像還需要解決大量光子時間信息的傳輸問題,可以結(jié)合高性能FPGA進(jìn)行熒光壽命的預(yù)估計或光子數(shù)據(jù)的壓縮,降低所需的數(shù)據(jù)傳輸帶寬,進(jìn)一步推動寬視場高速FLIM技術(shù)的實用化。
單光子激光雷達(dá)
單光子激光雷達(dá)使用激光主動探測目標(biāo)物體,通過測量返回光子的飛行時間獲取深度信息,能夠以較高精度重建遠(yuǎn)距離目標(biāo)物體的三維形狀,被廣泛應(yīng)用于自動駕駛、機(jī)器視覺以及遙感測繪等領(lǐng)域。基于陣列式SPAD的單光子激光雷達(dá)系統(tǒng)相比于傳統(tǒng)的單點掃描方式,在采集速度上有明顯的優(yōu)勢,適用于自動駕駛等需要實時三維場景信息的領(lǐng)域。
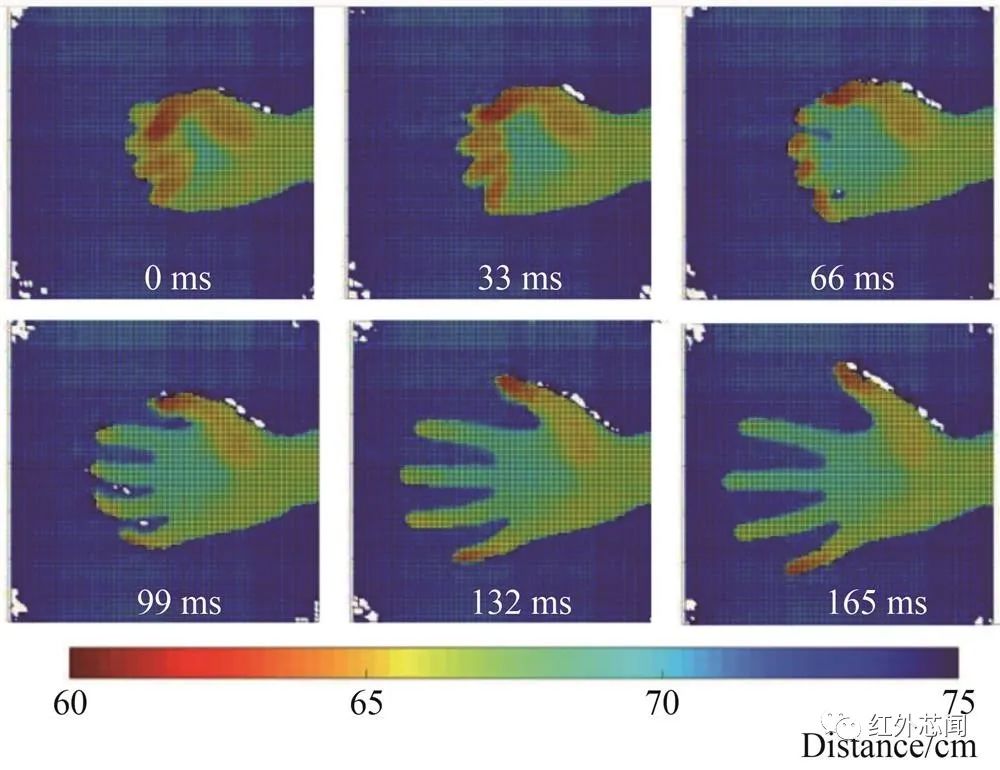
圖5 SPAD陣列采集的連續(xù)6幀深度圖像,速度為30幀/秒,其中一只手正在緊握和松開
在硬件方面,SPAD陣列的時間分辨能力是激光雷達(dá)應(yīng)用所需要的關(guān)鍵指標(biāo)。可以對SPAD陣列中光敏區(qū)域的厚度以及淬火電路進(jìn)行優(yōu)化,降低探測器的時間抖動,同時應(yīng)該根據(jù)應(yīng)用場景確定合適的時間分辨率與量程并搭配相應(yīng)的TDC電路。微透鏡技術(shù)以及3D電路堆疊技術(shù)可以顯著提升SPAD陣列填充因子,從而提升激光雷達(dá)系統(tǒng)的探測效率與成像速度。另外相比于單點掃描結(jié)構(gòu),基于SPAD陣列的激光雷達(dá)的光源能量更為分散,因此搭配更高脈沖能量、更高重頻的激光器也是提高探測距離與成像速度的關(guān)鍵因素之一。在算法層面,現(xiàn)有的單光子激光雷達(dá)往往需要多次探測以準(zhǔn)確估計反射光信號的到達(dá)時間,首光子成像算法的應(yīng)用能夠有效降低現(xiàn)有單光子激光雷達(dá)系統(tǒng)對入射光子數(shù)量的要求。
光脈沖飛行成像
SPAD陣列能夠在全視場范圍內(nèi)并行采集光子數(shù)量以及飛行時間信息,對于在視場內(nèi)以光速運(yùn)動的激光脈沖,可以利用SPAD陣列的數(shù)據(jù)重建激光脈沖的飛行過程,即光脈沖飛行成像(LiF)。相較于基于全息干涉、條紋相機(jī)或是光子混合器件(PMD)的LiF成像,基于SPAD陣列的LiF成像系統(tǒng)具有結(jié)構(gòu)簡單、成本低與精度高等優(yōu)點。
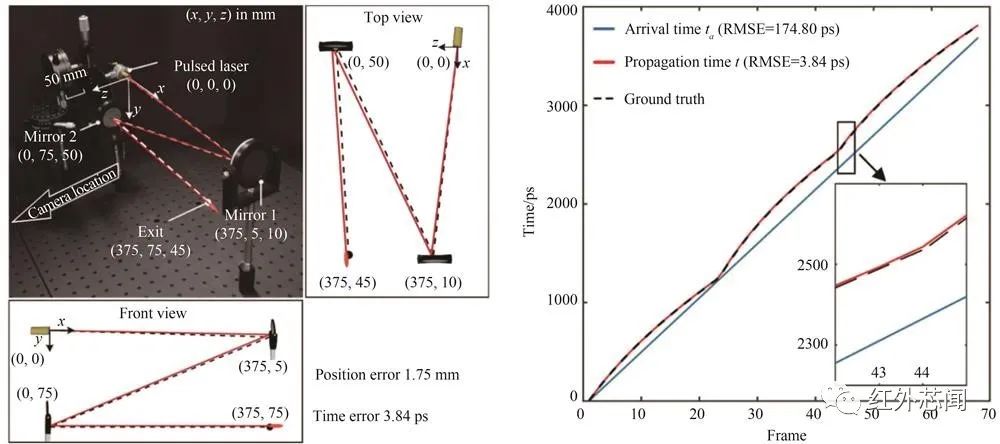
圖6 基于SPAD陣列的四維LiF成像結(jié)果
在LiF成像中,各像素采集的光子信息并不是相互獨立的,可以通過關(guān)聯(lián)多個像素的相對位置以及飛行時間等信息拓展LiF成像的維度。適用于LiF成像的SPAD陣列應(yīng)當(dāng)具有較高的時間分辨能力與填充因子。較高的填充因子可以降低SPAD視場中的盲區(qū),使得激光脈沖在飛行過程中的強(qiáng)度與形狀被完整地記錄,而SPAD陣列的時間分辨能力可以使人們精確地記錄并分析激光脈沖隨時間的變化情況。未來隨著SPAD陣列的進(jìn)一步發(fā)展,可以利用SPAD陣列對一些更復(fù)雜的超快過程進(jìn)行成像,例如觀測超快激光脈沖與物質(zhì)的相互作用過程。
基于光子飛行時間的非視域成像
傳統(tǒng)光學(xué)系統(tǒng)往往依賴于光的直線傳播原理以及物點與像點之間的一一對應(yīng)關(guān)系,成像的目標(biāo)僅限于視場之內(nèi)。然而在自動駕駛、地震救援與軍事偵察等領(lǐng)域,僅有視場內(nèi)目標(biāo)物體的信息并不能完全滿足需求,如何將成像的范圍拓展至直接視域外是近年來成像領(lǐng)域的研究熱點。基于光子飛行時間的非視域(NLOS)成像因其測量范圍大、重建精度高等優(yōu)點成為了NLOS成像的一種主要實現(xiàn)方案。在基于光子飛行時間的NLOS成像中,脈沖光于中繼面上散射后與直接視域之外的目標(biāo)物體發(fā)生二次散射,最終攜帶物體信息的部分光子再回到中繼面上并被探測器所接收。
條紋相機(jī)、ICCD以及PMD等設(shè)備最先被應(yīng)用于NLOS成像中,隨后單點SPAD加掃描振鏡的結(jié)構(gòu)因其高精度、低成本與靈活性高等特點被廣泛應(yīng)用于NLOS成像中。然而基于單點掃描的NLOS成像系統(tǒng)始終難以突破成像速度的瓶頸,因此人們開始將SPAD陣列用于NLOS成像系統(tǒng)中以提高成像速度。
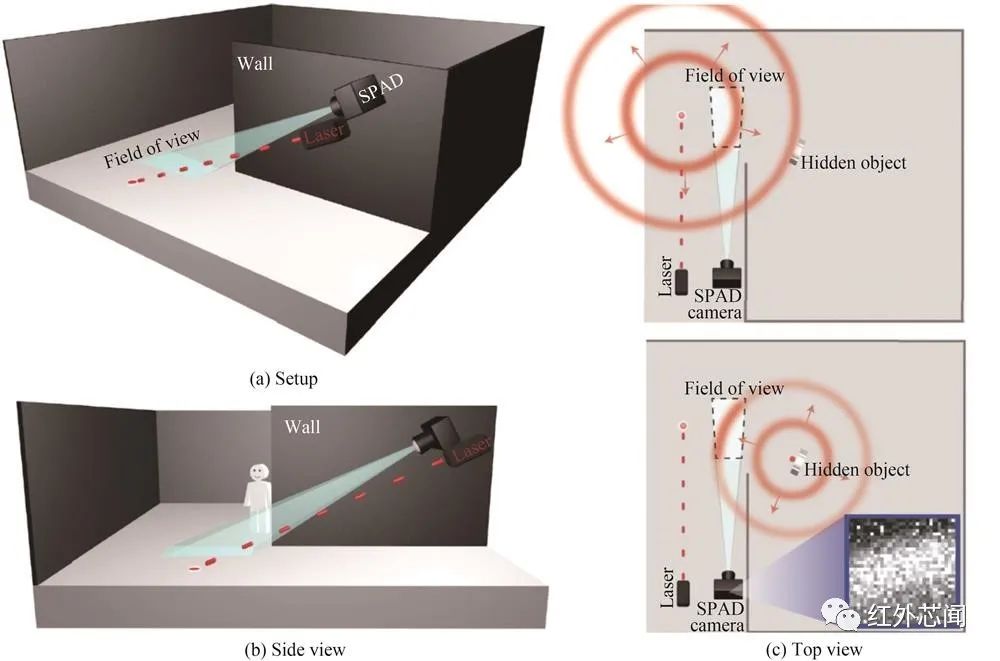
圖7 基于SPAD陣列的非視域目標(biāo)追蹤系統(tǒng)
目前SPAD陣列在時間分辨率以及暗計數(shù)等性能指標(biāo)上與單點SPAD還存在一定差距,基于SPAD陣列的NLOS重建算法還不成熟,但SPAD陣列在成像速度以及系統(tǒng)集成程度方面優(yōu)于單點SPAD加掃描振鏡的結(jié)構(gòu)。在一些應(yīng)用場景中,例如自動駕駛,對NLOS成像系統(tǒng)的實時性與便攜性會有非常高的要求。另外,三維NLOS成像的縱向分辨率主要取決于SPAD的時間分辨能力,使用時間分辨能力更強(qiáng)的SPAD陣列可以重建出更豐富的三維物體細(xì)節(jié),因此適用于NLOS成像的SPAD陣列在時間分辨率上還需要進(jìn)一步提升。隨著SPAD陣列性能的提高以及非共焦重建算法的優(yōu)化,未來基于SPAD陣列的NLOS成像系統(tǒng)將有望取代現(xiàn)有的掃描成像構(gòu)型,進(jìn)一步推動NLOS成像的普及化與實用化。
時域散射成像
如何對散射介質(zhì)之后的物體進(jìn)行成像,一直是光學(xué)成像領(lǐng)域中的難題,其中最大的障礙就是攜帶物體信息的光子在經(jīng)過散射介質(zhì)時會發(fā)生隨機(jī)散射而導(dǎo)致信息丟失。在散射介質(zhì)之后的物體自身發(fā)出或反射的光子中,有少部分光子在經(jīng)過散射介質(zhì)時未發(fā)生散射或散射次數(shù)較少,這類光子保持原有傳播方向不變且攜帶目標(biāo)物體的信息,此類光子被稱為彈道光子及蛇形光子。由于被散射的次數(shù)較少,彈道光子與蛇形光子總是比多次散射的光子更早到達(dá)探測器,因此可以在時域上篩選出這類光子。隨著散射介質(zhì)厚度的增加,這些直接攜帶物體信息的光子所占的比例會不斷降低,增加了探測難度。SPAD陣列能夠精確地測量單個光子的到達(dá)時間,因此可以使用SPAD陣列探測并篩選出彈道光子以及蛇形光子。
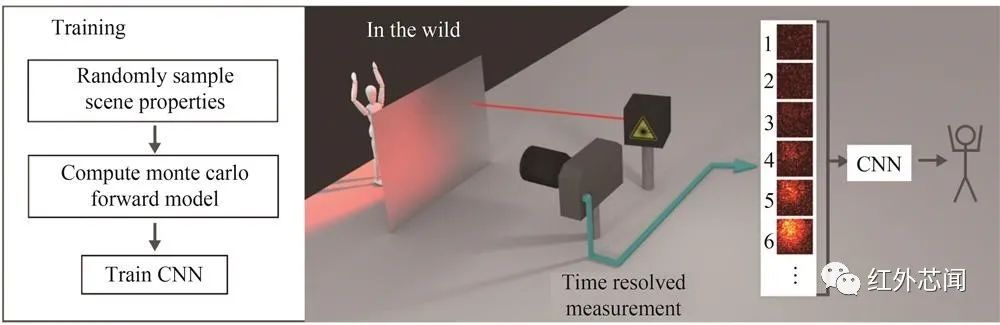
圖8 結(jié)合SPAD陣列與深度學(xué)習(xí)實現(xiàn)散射介質(zhì)后物體的分類
散射成像的難點在于散射介質(zhì)把原本包含物體信息的光場變得完全混亂,單純從空域上的光強(qiáng)分布難以辨認(rèn)物體細(xì)節(jié)。SPAD陣列能夠在空間域以及時間域上提供豐富的光子信息,從建模角度可以結(jié)合時域與空域信息建立更完善的散射傳播模型,而利用深度學(xué)習(xí)、神經(jīng)網(wǎng)絡(luò)等手段則能夠通過額外的時間維度信息更精確地建立目標(biāo)物體細(xì)節(jié)與光子數(shù)據(jù)之間的對應(yīng)關(guān)系,實現(xiàn)更好的成像效果。基于SPAD陣列的時域散射成像將會是解決散射成像問題的有力手段之一。
總結(jié)與展望
SPAD的發(fā)展與其他光電探測器類似,都經(jīng)歷了由單點探測器到多像素陣列的過程。得益于CMOS技術(shù)的應(yīng)用,SPAD陣列在像素規(guī)模以及電路集成度上發(fā)展十分迅速,短短十幾年間就從幾十像素、僅有光子計數(shù)功能的簡單陣列發(fā)展到百萬像素且具備時間測量功能的超大規(guī)模SPAD陣列。在像素規(guī)模逐漸增大的同時,光子探測效率、暗計數(shù)、光譜響應(yīng)范圍以及時間分辨率等關(guān)鍵參數(shù)也隨著相關(guān)技術(shù)的發(fā)展而不斷優(yōu)化。光學(xué)成像具有悠久的歷史,隨著科學(xué)的發(fā)展與技術(shù)的進(jìn)步,人們的研究興趣也從傳統(tǒng)成像逐漸拓展至極端條件下的成像,例如超分辨成像、極弱光成像以及超視距成像等等。SPAD具備單光子靈敏度和ps級別的時間分辨能力,在極端條件下依然能夠獲取光子信息。在早期SPAD陣列性能還不夠完善時,為了獲得二維圖像人們往往將單點SPAD探測器與掃描裝置結(jié)合。隨著SPAD陣列的逐漸成熟,在車載激光雷達(dá)、生物醫(yī)學(xué)成像等對成像實時性要求較高的應(yīng)用中,SPAD陣列以其高效的并行單光子探測能力開始逐漸取代單點掃描系統(tǒng)。另外,利用SPAD陣列的高動態(tài)范圍性能可以便捷地獲取高動態(tài)范圍圖像,有潛力解決目標(biāo)識別以及自動駕駛中成像場景動態(tài)范圍變化過大的問題。在散射成像以及非視域成像中,SPAD陣列的出現(xiàn),使得原本被多路徑、散射等因素造成的復(fù)雜光子傳播過程在時域與空域上得以被區(qū)分,因此可以結(jié)合物理建模或神經(jīng)網(wǎng)絡(luò)等方法進(jìn)一步獲取關(guān)于視域外或是散射介質(zhì)之后目標(biāo)物體的信息,突破了傳統(tǒng)成像中“光沿直線傳播”的物理限制。利用SPAD陣列的高時間分辨率以及并行采集能力還可以追蹤在視場中高速運(yùn)動的激光脈沖,有助于推進(jìn)對一些超快光學(xué)現(xiàn)象的研究。
近年來SPAD陣列在像素規(guī)模、時間分辨能力、暗計數(shù)以及探測效率等方面的進(jìn)步促進(jìn)了各種成像應(yīng)用的發(fā)展,但隨著SPAD陣列像素規(guī)模的不斷擴(kuò)大,人們對SPAD陣列的性能要求與有限像素面積、有限功耗之間的矛盾也日益顯現(xiàn)。各種成像應(yīng)用對高性能SPAD陣列的需求促使人們不斷突破有限像素面積與功耗造成的瓶頸,例如最新的集成電路工藝可以用于制造性能均衡的SPAD光敏單元,3D電路堆疊技術(shù)以及微透鏡技術(shù)可以在保證附加電路性能的同時提升探測效率,這些技術(shù)為未來高性能SPAD陣列的普及提供了可能。另外,在不同的應(yīng)用場景中可以根據(jù)實際需求對SPAD陣列的設(shè)計進(jìn)行優(yōu)化,舍棄不必要的功能以提升填充因子并降低功耗。在光譜響應(yīng)方面,目前硅基SPAD陣列的光譜響應(yīng)峰值主要集中在可見光波段,可以通過結(jié)構(gòu)和工藝優(yōu)化提高硅基SPAD陣列在近紅外波段的光子探測概率,從而利用近紅外光較強(qiáng)的穿透能力提升激光雷達(dá)與散射成像等技術(shù)的探測范圍。基于InGaAs或InP等基底材料的SPAD陣列能夠響應(yīng)1 450 nm以上的短波紅外光,因此這類SPAD陣列在光纖成像以及量子光學(xué)等領(lǐng)域具有很大的應(yīng)用潛力。SPAD陣列能夠高效獲取光子時空域信息,如何最大限度地利用這些光子數(shù)據(jù)也是今后SPAD陣列應(yīng)用中需要解決的問題。除了建立光子傳播的物理模型之外,還可以利用深度學(xué)習(xí)等數(shù)據(jù)驅(qū)動的智能算法,從更高維度建立光子時空分布信息與目標(biāo)特征的對應(yīng)關(guān)系,從而深入挖掘SPAD陣列數(shù)據(jù)中隱含的信息,提高成像的范圍、精度以及效率。今后SPAD陣列將會在光學(xué)成像中發(fā)揮更重要的作用,為人們感知世界、認(rèn)識世界提供更有力的工具。
審核編輯:劉清









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論