2018年6月26日—推動高能效創新的安森美半導體(ON Semiconductor,美國納斯達克上市代號:ON)推出3款新的高能效中壓脈寬調制(PWM)降壓轉換器。
2018-06-26 16:06:32 6288
6288 本帖最后由 gk320830 于 2015-3-4 13:18 編輯
555產生方波后轉化為鋸齒波,實現脈寬調制。以此調制0-5v模擬電壓,脈寬調制使用占空0-100%。有大俠設計過此類電路么,求用proteus的圖
2014-12-30 15:34:31
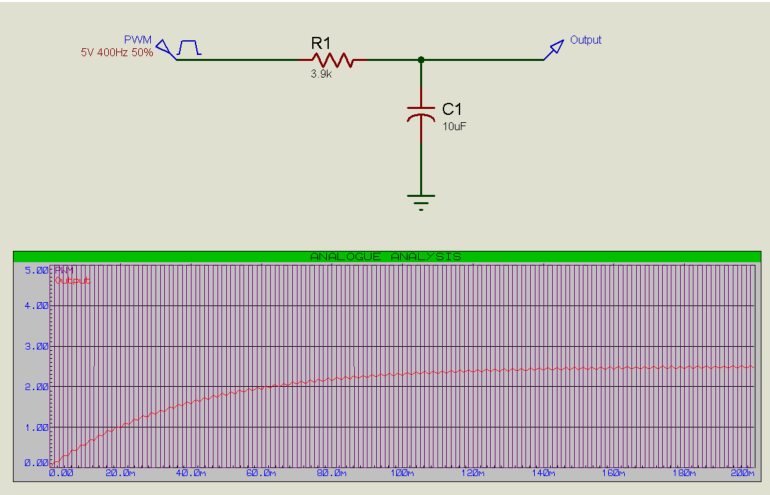
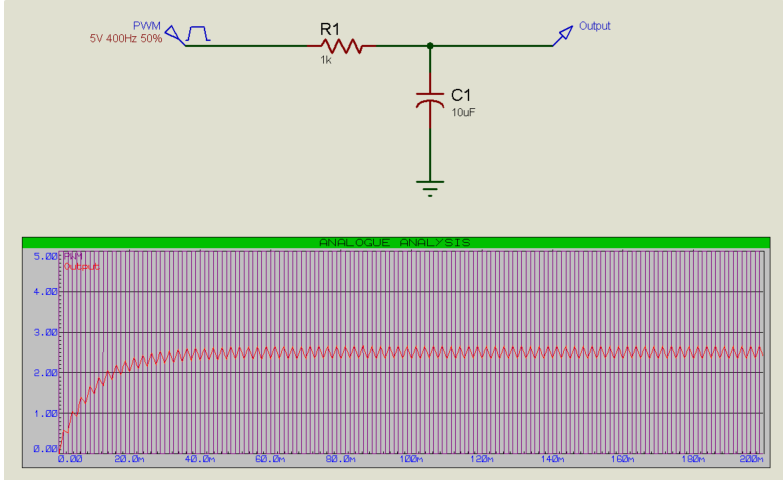
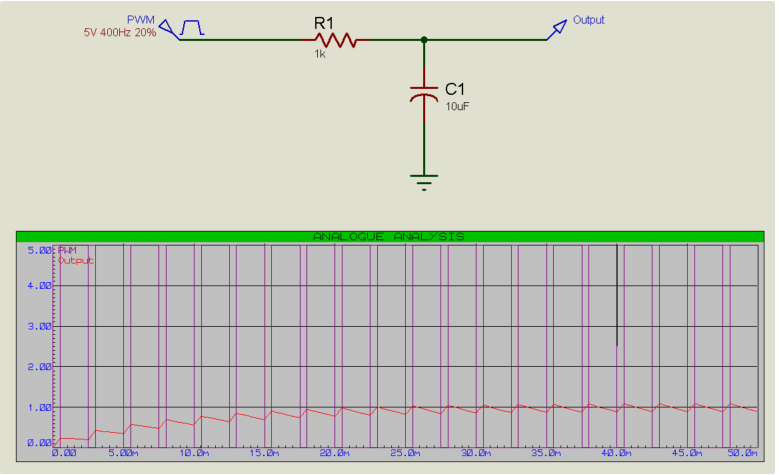
555產生方波后轉化為鋸齒波,實現脈寬調制。以此調制0-5v模擬電壓,脈寬調制使用占空0-100%。有大俠設計過此類電路么,求用proteus的圖,,,下圖是我畫的圖!鋸齒波的電壓變化只在3左右浮動,,想請問參數我設置的不好,大家解釋下
2014-12-30 15:48:09
本帖最后由 gk320830 于 2015-3-5 04:31 編輯
PWM脈寬調制
2012-06-14 17:29:11
PWM脈寬調制
2016-06-25 22:17:05
1.實現方法PWM脈寬調制,是靠改變脈沖寬度來控制輸出電壓,通過改變周 期來控制其輸出頻率。而輸出頻率的變化可通過改變此脈沖的調制周期來實現,PWM 信號廣 泛應用在直流電機調速和燈具調光領域
2021-09-07 06:30:24
脈寬調制技術的產生,發展與模式,脈寬調制技術原理,微型計算機控制產生PWM波的原理。 j
2008-08-27 23:16:00
PWM脈寬調制控制器MC44603P資料下載內容包括:MC44603P引腳功能與實測電壓MC44603P內部方框圖MC44603P典型應用電路
2021-03-24 07:59:39
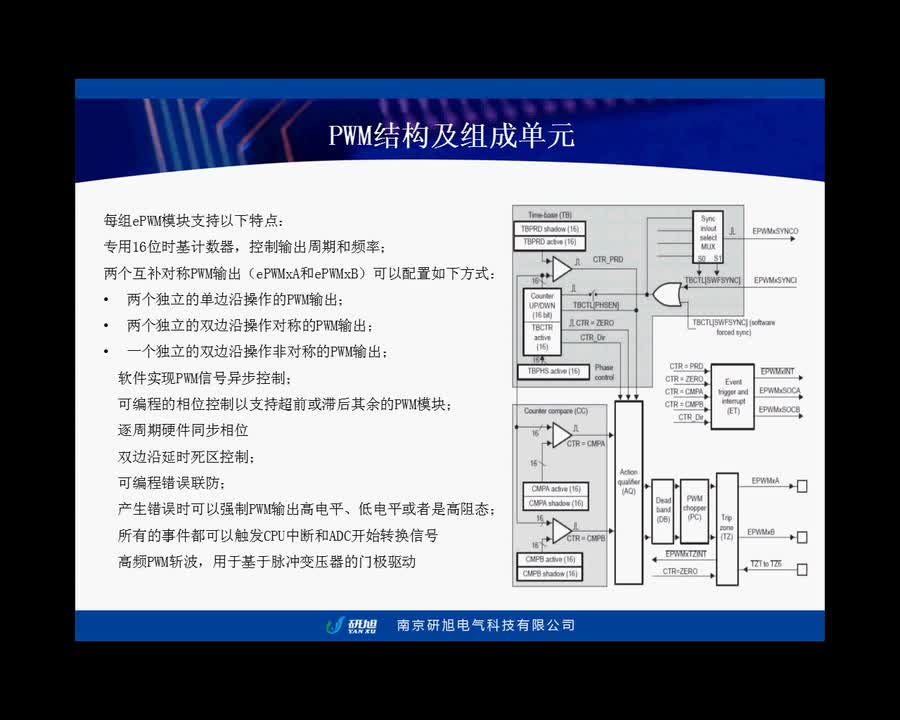
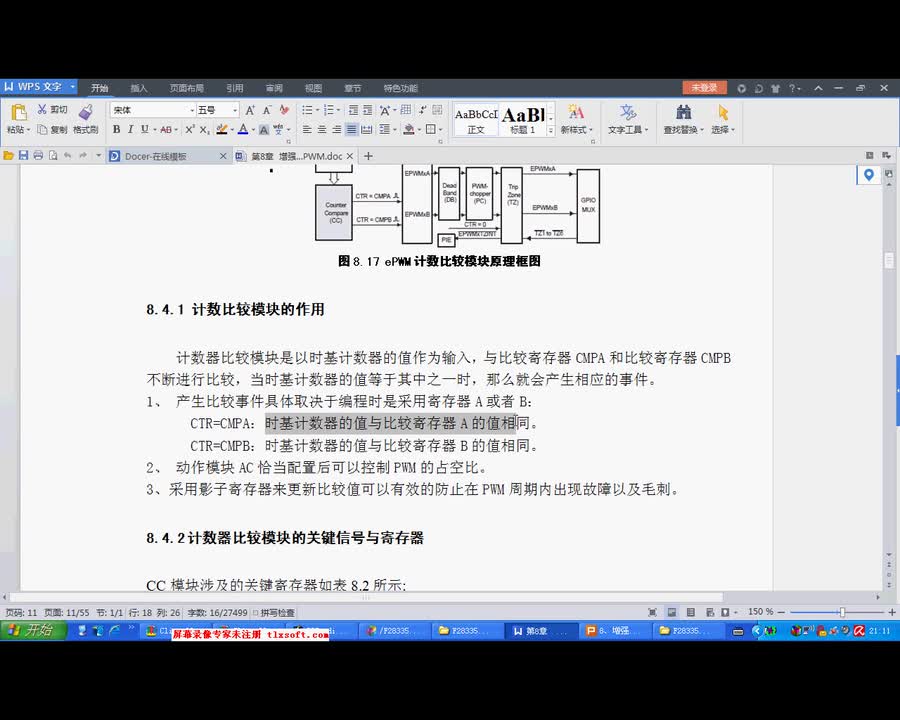
PWM—脈寬調制PWM模塊可以在GPIO上產生脈寬調制信號。 該模塊實現了一個上行或上下計數器,具有四個PWM通道,驅動分配的gpio。三個PWM模塊可以提供多達12個PWM通道與單獨的頻率控制組
2022-01-12 06:55:34
介紹了PWM原理以及其各種應用電路,加深對PWM底層的理解。
2018-12-06 13:36:22
求大神幫助用Keil的.c格式編一個C51的PWM脈寬調制程序。小弟在此感謝不盡。
2014-08-07 18:12:19
脈寬調制(PWM)技術
2020-05-24 09:16:17
本文將解釋脈寬調制 (PWM) 信號是如何創建的,以及說明您聽到的是音頻頻率而非PWM波形的開關頻率。本文將詳細說明輸出PWM波形為什么比輸出線性波形效率高很多,還將說明為什么某些D類放大器要求LC過濾器,而某些則不需要。
2021-06-08 06:56:02
SPWM正弦脈寬調制介紹SPWM是調制波為正弦波、載波為三角波或鋸齒波的一種脈寬調制法。特點: 原理簡單,通用性強,控制和調節性能好,具有先出諧波、調節和穩定輸出電壓的多種作用,是一種比較好的波形
2021-11-15 08:18:34
無刷直流電機的PWM調制方式介紹 (2014-01-03 15:35:28)轉載▼標簽: 無刷直流電機 pwm調制方式 bldc驅動方案 三相無刷直流電機的調制方式:方波120度脈寬調制(120Degree-PWM)、正弦脈寬調制(SPWM)和空間矢量脈寬調制(SVPWM),本文將對各自方式
2021-07-05 07:00:23
脈寬調制(PWM)脈寬調制(PWM)是利用微處理器的數字輸出來對模擬電路進行控制的一種非常有效的技術,廣泛應用在從測量、通信到功率控制與變換的許多領域中。模擬電路模擬信號的值可以連續變化,其時
2021-07-23 07:26:50
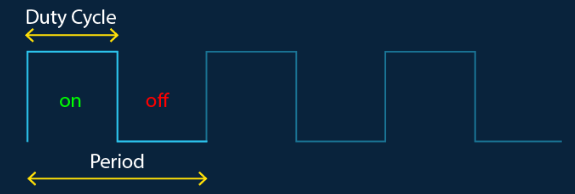
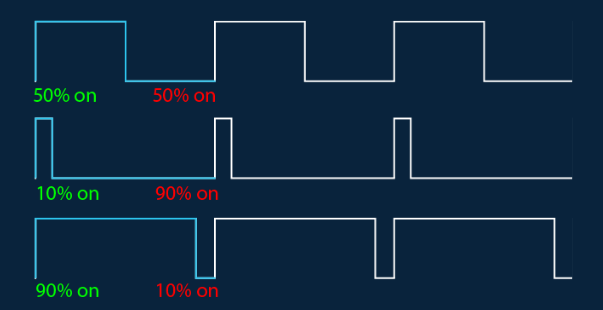
1.占空比是高電平所占周期時間與整個周期時間的比值。2.脈寬調制(PWM)基本原理:控制方式就是對逆變電路開關器件的通斷進行控制,使輸出端得到一系列幅值相等的脈沖,用這些脈沖來代替正弦波或所需
2021-09-07 08:42:12
雙路脈寬調制PWM控制器MAX8743資料下載內容包括:MAX8743功能和特性MAX8743MAX8743內部方框圖MAX8743電氣參數MAX8743典型應用電路
2021-04-01 06:36:37
在PWM脈寬調制控制電機電路中,快速恢復二極管的作用是什么呢?
2023-03-09 17:15:39
PWM是什么?怎樣采用定時器的方法去實現PWM脈寬調制呢?
2021-11-08 06:08:12
新手求開關電源脈寬調制電路原理pwm的原理。各位大神求指教!!
2015-04-20 18:55:08
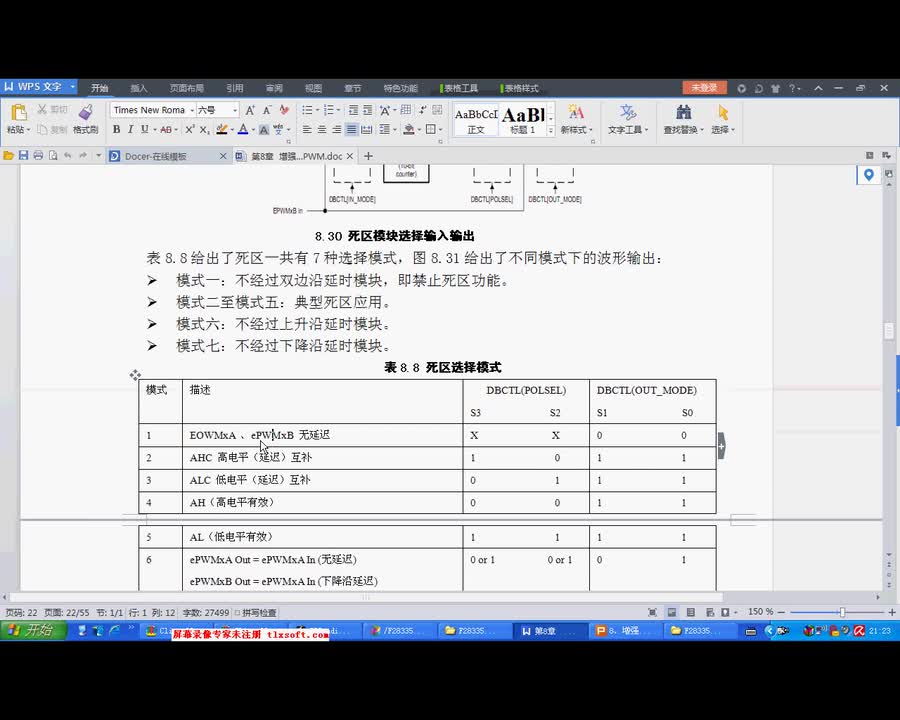
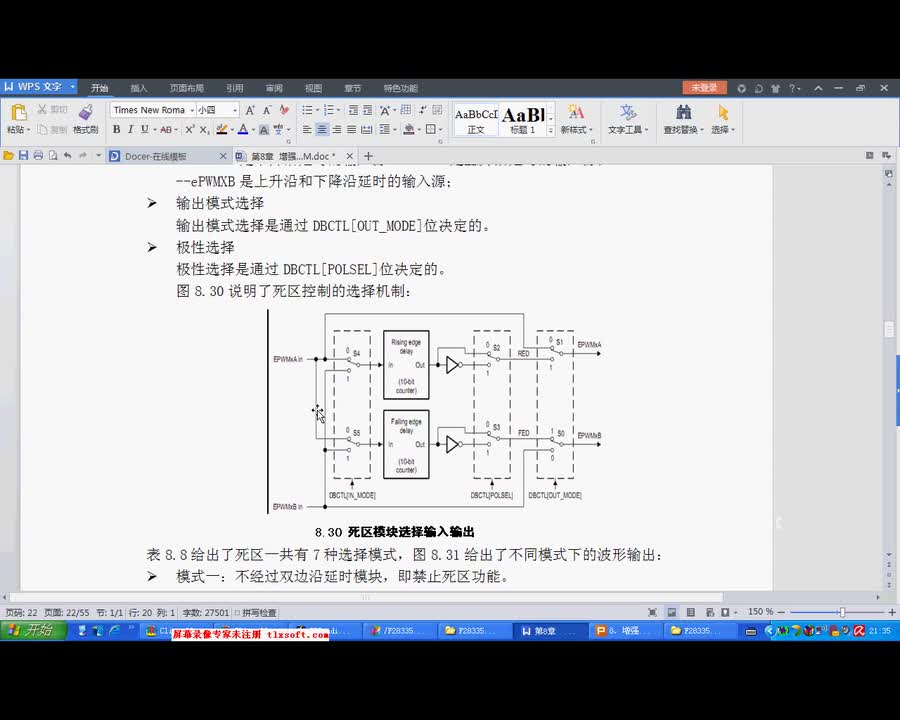
什么是死區呢?有哪幾種方式去實現PWM脈寬調制呢?
2022-01-25 07:13:22
用函數發生器建立脈寬調制(PWM)波形應用指南 1466
2019-08-06 13:02:25
基于藍橋杯的單片機模塊練習——PWM脈寬調制功能概述用定時器模擬PWM脈寬調制信號(頻率為100hz),開控制LED1的亮度。要求單片機上電后,LED全部熄滅,按下S7后,LED以10%的亮度被點亮
2022-01-07 07:05:53
直流電機脈寬調制調速的原理是什么?直流電機脈寬調制調速的方法有哪些?
2021-07-13 08:29:16
脈寬調制。它是利用微處理器的數字輸出來對模擬電路進行控制的一種非常有效的技術,廣泛應用于測量,通信,功率控制與變換等許多領域。PWM是一種對模擬信號電平進行數字編碼的方法...
2021-07-05 07:11:02
stm32具有脈寬調制功能么???
2020-06-04 04:35:09
脈寬調制技術的產生,發展與模式,脈寬調制技術原理,微型計算機控制產生PWM波的原理。
2008-08-27 23:11:54 24
24
均值PWM波脈寬調制技術,次最優PWM波參數算法,DPWM濾脈寬算法,改進型等面積PWM控制算法,周期補償無
2008-08-27 23:15:52356 脈寬調制(PWM)技術 填空題: 1.PWM控制就是對脈沖的________進行調制的技術;直流斬波電路得到的PWM波是________,SPWM波得到的是________。 2.PWM逆變電路也可分
2009-01-12 11:51:4376 SA60 是美國Apex 公司生產的大功率脈寬調制型功放, 具有效率高, 輸出電流大, H 橋驅動負載等特點。本文介紹了該功放的引腳功能和工作過程,并給出了應用實例。
2009-04-30 14:28:3846 空間矢量脈寬調制( SVPWM)是一種新型的PWM方法,文章介紹了其基本原理,提出了在Matlab /Sim2ulink環境下用S函數實現電壓型空間矢量PWM逆變器的方法,詳細描述了仿真模型的設計過程和編程
2009-05-01 09:56:1033
空間矢量脈寬調制原理及算法分析:闡明了三相電壓型逆變器空間矢量脈寬調制(SV PWM ) 基本原理, 給出了兩種SV PWM 算法, 即SV PWM 常規算法和快速算法, 通過理論和仿真分析證明了
2009-06-08 13:15:0189 脈寬調制技術:脈寬調制技術起源于很早,早在80年代未就廣泛應用于工業功率控制裝置中。
2009-08-08 09:38:1636 脈寬調制和DC - DC轉換(PWM & DC-DC Converter)培圳資料:What Is a Switching Regulator?
A switching regulator
2009-11-20 11:13:4853 PWM脈寬調制信號輸入模擬信號輸出隔離變送器
2023-04-13 15:24:04
脈寬調制的基本原理及其應用實例:脈寬調制(PWM)是利用微處理器的數字輸出來對模擬電路進行控制的一種非常有效的技術,廣泛應用在從測量、通信到功率控制與變換的許多領域中
2010-01-10 12:11:0992 utc494 電壓型脈寬調制(PWM)控制電路
UTC494是一單片雙極型線性集成電路,包含了脈寬調制型開關電源的所有控制部分。它內部包括有5V參考電源,兩個誤差放大器,觸發器,輸
2010-01-10 12:16:2774 脈寬調制(PWM)的使用隨著數字控制邏輯的增長而增加。脈寬調制為數字控制電路建立了一種與模擬信號控制等同的簡易方法。許多微控制器都有內置PWM能力。PWM也用于通信系統
2010-06-15 08:17:0746 許多應用需要脈寬調制(PWM)電路,如:電壓調節器、功率控制、風扇速度控制等。圖1所示電路利用三個運算放大器構成了PWM電路,由于運算放大器選擇的靈活性,該方案能夠滿
2006-03-11 13:01:381196 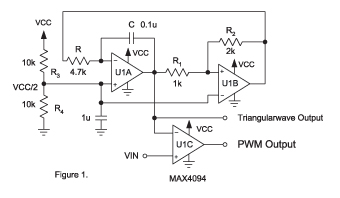
ADP4000/ADP4100 六相脈寬調制(PWM)控制器
全球領先的高性能、高能效硅解決方案供
2008-10-22 08:34:431382
UPS-1000的PWM脈寬調制,市電供電逆變器供電切換電路原理圖
2008-11-05 08:46:411104 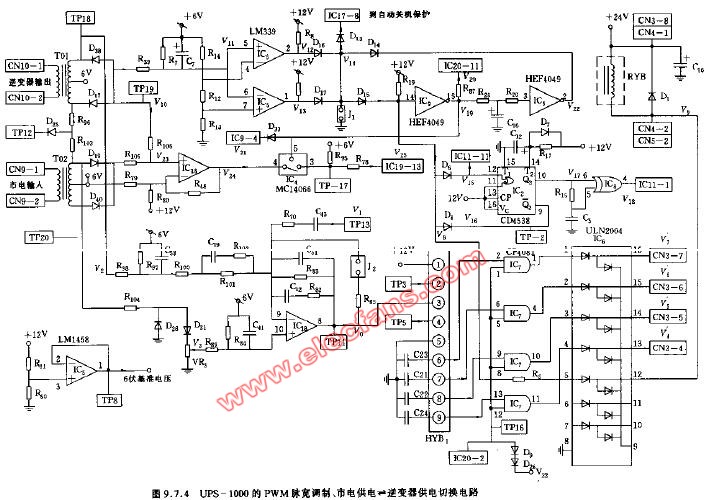
脈寬調制器電路圖1
2009-04-03 08:54:251137 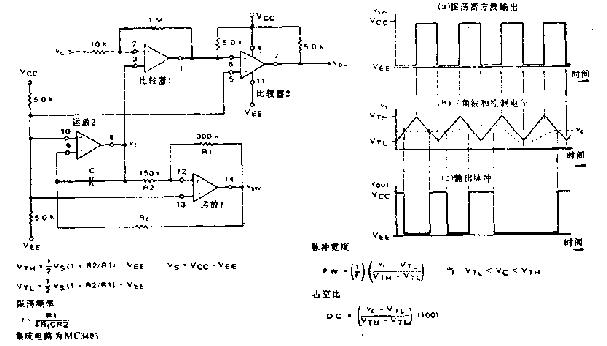
脈寬調制器電路圖2
2009-04-03 08:54:43738 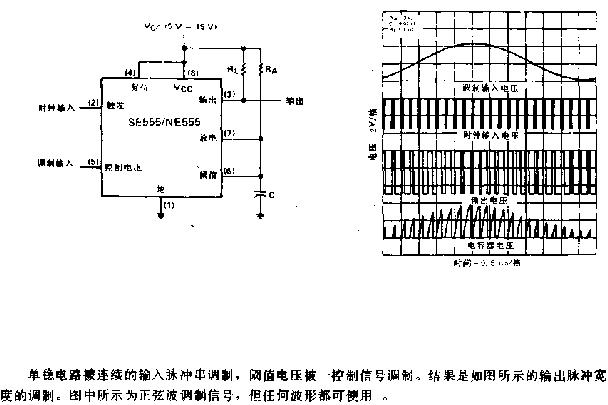
脈寬調制器電路圖3
2009-04-03 08:55:01830 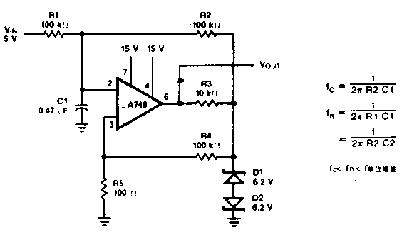
脈寬調制器電路圖4
2009-04-03 08:55:22857 
脈寬調制器電路圖5
2009-04-03 08:56:14738 
什么是PWM(脈寬調制)
PWM(Pulse Width Modulation)——脈寬調制,是一種開關式穩壓電源應用,是利用微處理器的數字輸出來對模擬電路進行控制的一種非常有效的技術。
2009-04-10 12:23:1714992
脈寬調制電路圖
2009-04-10 18:24:194046 
離線式綠色環保模式脈寬調制控制器
日前,德州儀器 (TI) 宣布推出離線式綠色環保模式脈寬調制 (PWM) 控制器,可提高電源應用效率,同時還可最大限度地降低其空間占
2009-11-18 09:45:08456 脈寬調制驅動原理
脈寬調制方式是一種供電電壓比電機額定供電電壓高得多的情況下而采用斬波方式使電動機繞組電流從低速到高速
2010-01-09 14:05:062887 
PWM控制器,PWM控制器是什么意思
脈寬調制的基本原理及其應用實例
脈寬調制(PWM)是利用微處理器的數字
2010-03-23 13:35:057962 MAX8792脈寬調制(PWM)控制器具有高效率、出色的瞬態響應和極高的直流輸出精度,能夠將較高的電池電壓轉換成筆記本
2011-01-04 09:41:351770 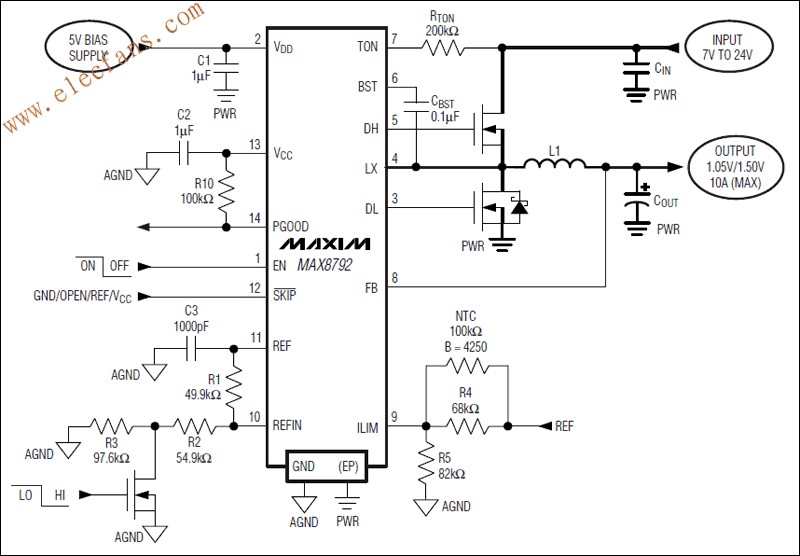
PWM脈寬調制直流調速系統設計及MATLAB仿真驗證
2015-11-24 10:08:1851 脈寬調制PWM在小車中的應用.pdf,感興趣的可以看看。
2016-06-03 14:30:585 基于TC1的脈寬調制器設計,快來下載學習啊
2016-07-04 14:01:588 PWM脈寬調制技術學習資料
2016-11-05 09:59:208 基于DSP開發的脈寬調制電路
2017-03-14 10:30:193 = 和任意度的移相。測試結果表明:在100 HZ 到20 kHz 脈寬調制信號下,電路的三種模式都能保證信號的精度與移相的穩定。 脈寬調制( PWM )信號在電路設計應用中有著廣泛的應用,在發光: 二極管( LED )驅動電路中經常用來調節光的亮度。在PWM 信號為高時,發光
2017-11-06 15:46:4524 )指脈寬調制技術:通過對一系列脈沖的寬度進行調制,等效出所需要的波形(含形狀和幅值)。 說明: PWM的思想源于通信技術,全控型器件的發展促進了PWM技術的應用和完善; PWM技術在逆變電路中的成功
2017-11-27 16:38:4910 設計了一種基于TL494芯片的電壓負反饋配合電流正反饋的CO2焊機送絲調速電路。該電路通過PWM脈寬調制,實現轉速的均勻調節,并具有過電流截止保護功能。
2017-12-05 11:55:288799 
在中小容量變頻電源的設計中,采用自關斷器件的脈寬調制系統比非自關斷器件的相控系統具有更多的優越性。第二代脈寬調制器SG3525應用于交流電機調速、UPS電源以及其他需要PWM脈沖的領域。其外圍電路
2017-12-17 10:31:0610 單相脈寬調制( PWM)整流器通常采用網側電流與直流側電壓雙閉環控制系統結構,一旦其檢測系統中的傳感器發生故障,將導致反饋值出現偏差,影響系統的控制效果與運行安全。設計一種準確可靠的單相PWM整流器
2018-01-02 18:16:252 本文介紹了脈寬調制分類與優點,介紹了PWM脈寬調制原理,對PWM同步調制進行了介紹,介紹來了PWM具體應用以及幾種pwm調制方式。
2018-01-25 15:32:2366942 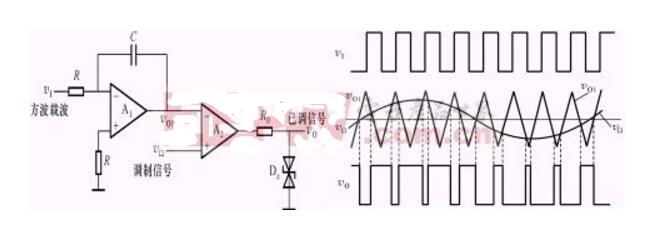
LED的亮度變化,我們是通過對LED的電流進行脈寬調制(PWM)控制;所產生的脈沖電流波形便是產生EMI的罪魁禍首。LED調光需要采用PWM控制,但它產生的EMI也必須予以抑制。
2018-02-07 16:22:443450 
脈寬調制(PWM)是電子學許多領域廣為采用的一個基本概念。它是一種簡單的平均方法,用于從微波爐功率百分比設定到LED調光等各種應用。PWM雖在某些方面相當復雜,但實施方法卻很簡單。
2018-02-24 14:26:597077 
本文檔的主要內容詳細介紹的是鍵盤控制和PWM調光脈寬調制的詳細資料概述。
2018-07-24 08:00:0014 本文檔的主要內容詳細介紹的是單片機PIC16F690的PWM脈寬調制演示實例程序說明。
2019-01-22 16:59:0924 直到我開始為音樂工作室設計一個效果器箱時,我才被迫首先涉足脈寬調制( PWM )應用。盡管它可以在合成器中產生非常有趣的效果,但它還有許多其他用途,對于不是電子學專家的人來說可能并不
2020-09-19 15:47:461020 隨著電力電子技術的發展,脈寬調制(Pulse Width Modulation,PWM)技術的應用日益引起人們的重視。本文介紹了一種由TL494為控制核心的脈寬調制技術,并將其應用于直流電動機控制系統。分析了該系統的工作原理、實現電路以及PWM控制芯片的結構和具體應用。
2021-02-12 17:51:003822 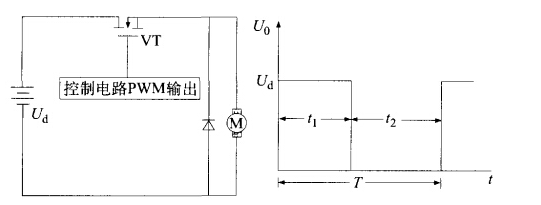
PWM全稱Pulse Width Modulation:脈沖寬度調制(簡稱脈寬調制,通俗的講就是調節脈沖的寬度),是電子電力應用中非常重要的一種控制技術,在理解TA之前我們先來了解幾個概念 。
2021-04-12 09:13:023855 
LTC6992-1/LTC6992-2/LTC6992-3/LTC6992-4:TimerBlox壓控脈寬調制器(PWM)
2021-04-28 19:01:460 LTC6992演示電路-TimerBlox壓控脈寬調制器(1 MHz PWM)
2021-06-08 15:30:5333 無刷直流電機的PWM調制方式介紹(常用的開關電源電路)-? ? ? ?三相無刷直流電機的調制方式:方波120度脈寬調制(120Degree-PWM)、正弦脈寬調制(SPWM)和空間矢量脈寬調制
2021-07-26 12:23:2119 脈沖寬度調制(Pulse width modulation,PWM)技術,其中包括:相電壓控制PWM、脈寬PWM法、隨機PWM、SPWM法、線電壓控制PWM等,而在鎳氫電池智能充電器中采用的脈寬PWM法,它是把每一脈沖寬度均相等的脈沖列作為PWM波形,通過改變脈沖列的周期可以調頻,改變脈沖的寬度或占空比可以調壓,采用
2021-12-22 19:39:1513 步進電機驅動器的恒流PWM調制是一種將恒定電流輸出到步進電機來驅動它旋轉的技術。
2023-03-10 14:44:033001 開關電源、逆變器的Mosfet/IGBT驅動控制中,使用的都是PWM脈寬調制信號;有所不同的是,使用PWM的控制策略不一樣,可能用的是SPWM,或者用的是SVPWM,或者其他的控制策略。
2023-03-23 16:08:481563 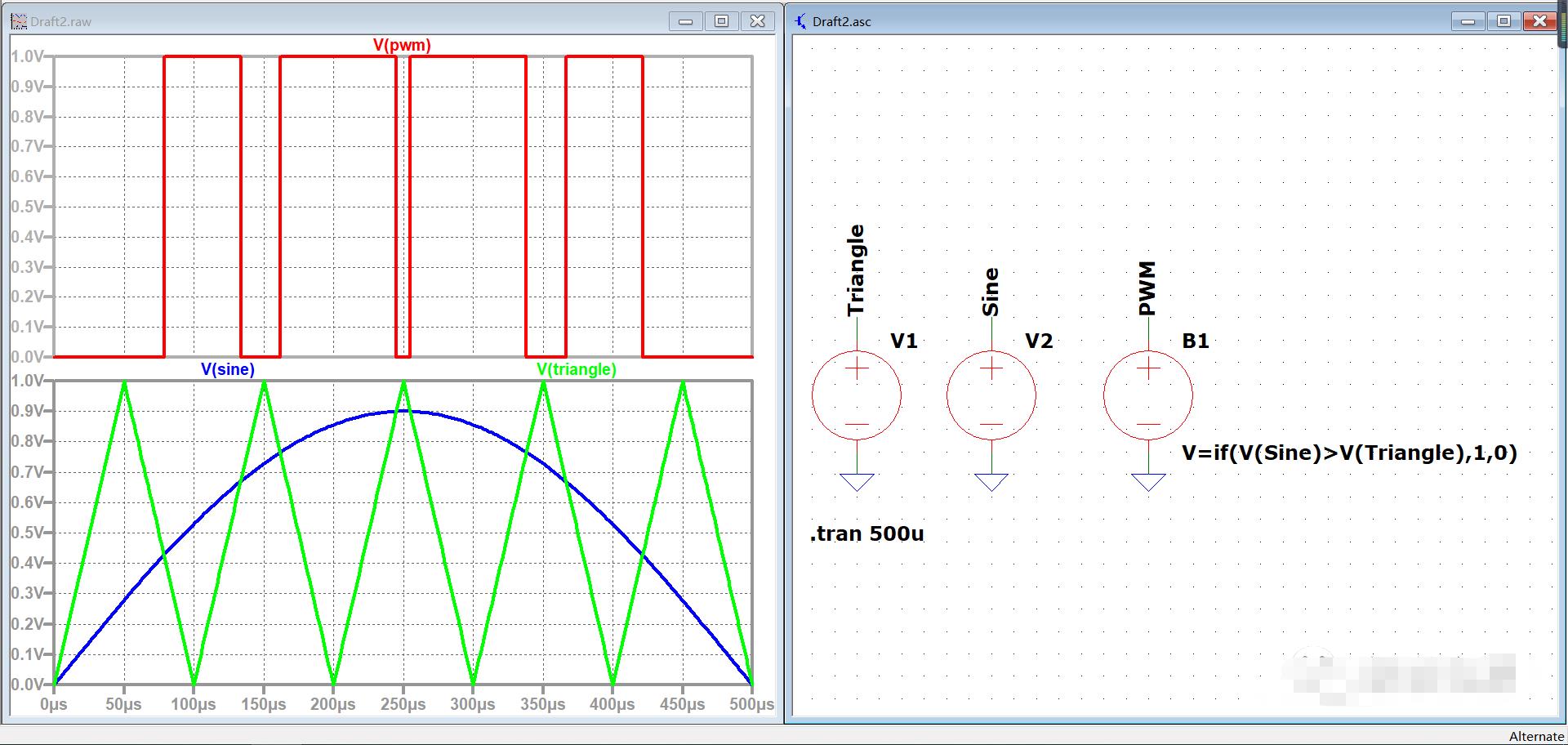
就是以PWM方式對直流電進行調制的變頻器。PWM是脈沖寬度調制的意思。變頻器是將外界固定頻率的電源先轉化成直流,再根據外電路的需要逆變成所需頻率、電壓的交流,根據負載類型的不同,其計算方式是很復雜的。而PWM并不改變電源頻率,只是通過控制通斷時間比例控制對外輸出的功率。
2023-04-26 09:42:14825 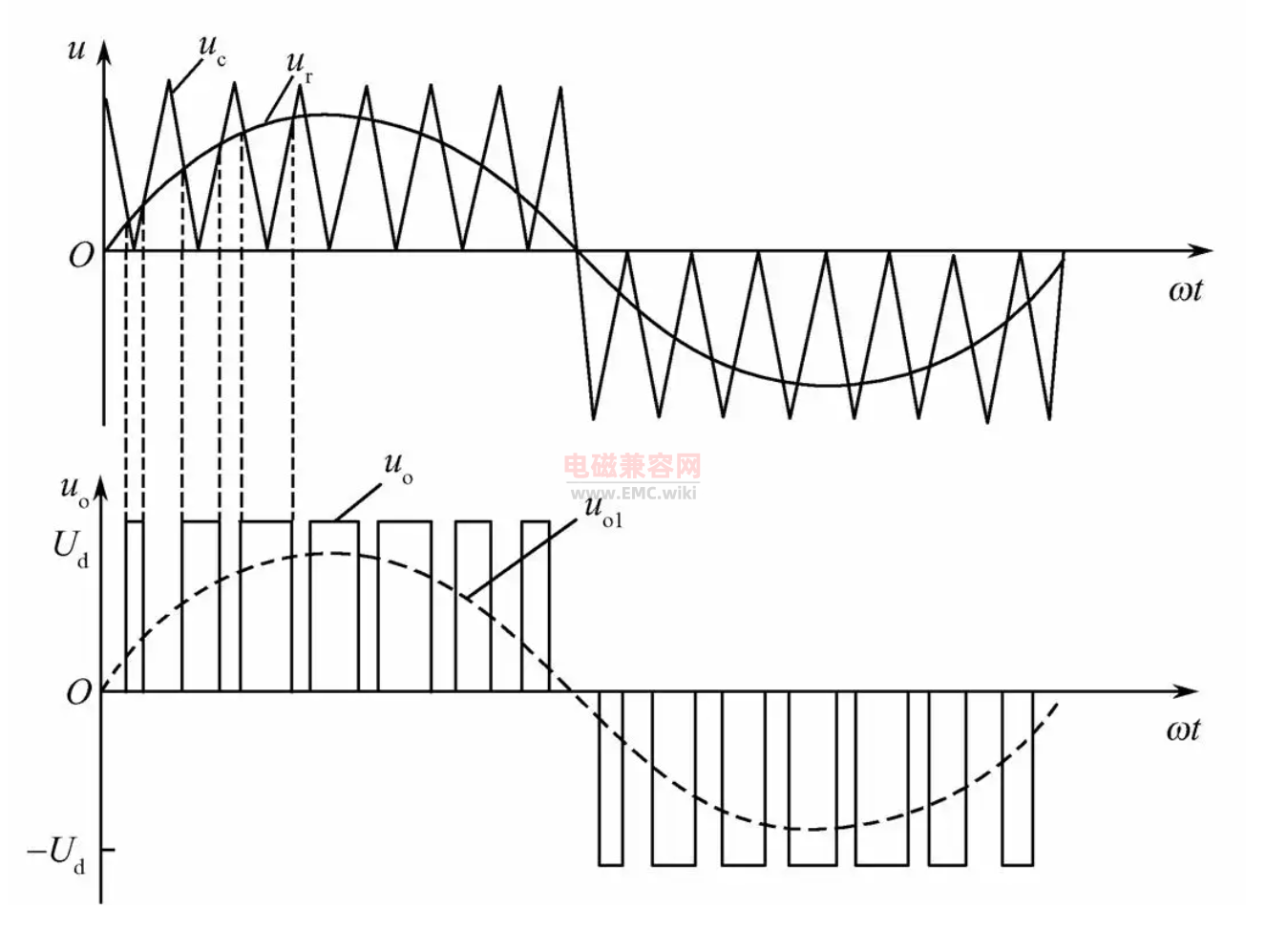
我們還是先從脈沖寬度調制的基礎說起。脈沖寬度調制,英文縮寫為:PWM(Pulse Width Modulation),是通過數字信號實現對模擬電路控制的一種非常有效的技術,常被廣泛應用于測量、通信、功率控制與變換等眾多領域。
2023-06-20 17:19:531058 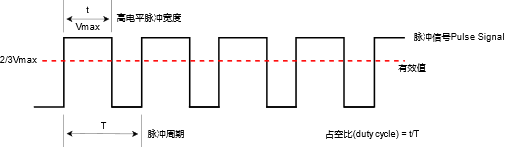
電子發燒友網站提供《使用LED進行脈寬調制(PWM)的Visuino RAMPS.zip》資料免費下載
2023-06-28 09:36:280 單極性PWM調制和雙極性PWM調制有什么區別? 單極性PWM調制和雙極性PWM調制是兩種常見的脈寬調制技術,用于調節模擬信號的幅度。它們在實際應用中有一些區別,下面將詳細討論這兩種調制技術及其區別
2024-02-06 14:13:13836 正弦脈寬調制原理是怎樣的 正弦脈寬調制控制的方法有哪些? 正弦脈寬調制(PWM)是一種常用的電子技術,用于控制模擬信號的大小和形狀。在正弦脈寬調制中,一個固定頻率的正弦波(稱為載波)的寬度根據
2024-02-06 14:41:24284
正在加载...
 電子發燒友App
電子發燒友App











 工商網監
工商網監
評論