 電子發燒友App
電子發燒友App


隨著上個月底大疆發布小型無人機Mavic,標志著整個無人機行業正式進入了小型化趨勢中。然而想要在這一新興趨勢下領漲行業,著力剖析小型化無人機中的重要技術一定是從業者需要特別關注的信息之一。
本期的智能內參,我們推薦來自廣發證券的小型無人機報告,先拋個重要結論過過癮:小型化是趨勢,但云臺不可簡配。
其中的道理將會在文中得到解答。以下為智能內參整理呈現的干貨:
技術要點在=“航拍”+“無人機”
市面上的小型無人機產品均需要在懸停定位技術、避障技術、視覺跟隨、圖傳技術等幾方面進行重點打磨。下圖為大疆Mavic和同級別產品的一個綜合對比。

要對無人機航拍技術進行梳理,首先需要知道無人機航拍技術有哪幾點。通常來看,無人機航拍技術其實可以簡單地按照字面的“無人機”+“航拍”拆分為2點:
(1)影像拍攝技術,也即成像以及圖像處理技術;
(2)無人機平臺技術,主要指為航拍提供穩定的航拍環境的機身控制技術。
影像拍攝技術:目前市場上的影像拍攝方案,都是對幾個大品牌主流的攝像頭模組的集成應用,無人機生產廠商在這一方面沒有太多的技術空間,而且因為技術發展已經比較成熟,不同產品方案之間差距并不大。因此,本篇報告僅作簡要介紹。
無人機機載平臺穩定技術:是指除了飛行導航、控制等無人機自身飛行技術以外,為無人機實現穩定航拍平臺保障的相關技術。這種技術是影響到成像質量最關鍵的因素。
隨著近幾年智能手機的迅猛發展,智能手機相關技術得到了空前的發展,以觸摸顯示屏、處理器、攝像頭模組等為突出代表的智能手機核心的硬件技術在大規模工業化需求的基礎上不斷地朝著低功耗、高性能、高集成的方向發展,在這一產業發展過程中,淘汰了大量落后技術產能,產品向索尼、三星等巨頭企業不斷集中。
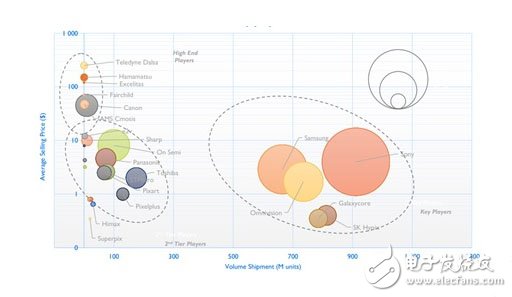
可以看到,不論在銷量還是銷售額,索尼憑借在移動端市場的出色表現,牢牢占據榜首。從總的品牌分布來看,前4名的企業占有了市場近75%的份額,市場分布較為集中。
影響成像質量的參數
在體現單個攝像頭模組成像水平的技術參數方面,通常大家比較關心的是一些具體、表觀參數,比如像素數、光圈大小等,但是攝像頭模組上影響成像質量的參數還有許多:單個像素尺寸、傳感器技術、鏡片組技術、ISP技術等。下面做一個簡單的介紹。
像素數/分辨率:像素數比如800萬像素(3200×2400分辨率)、1300萬像素(4208×3120分辨率)是目前攝像頭模組技術中最經常被提到的概念,但是像素數其實并非決定圖像清晰度的決定性因素。像素數僅決定一幅圖像中有多少單位像素,也即放大后,圖片能夠展現的細節程度,但是每個細節以及整張照片的圖像質量還取決于其他很多因素。
至于現在比較火的“4K視頻錄制”概念,指的就是分辨率達到4096×2160的影像拍攝能力,其實4K更新趨勢主要來自于播放設備以及膠片拍攝設備,因為之前的播放設備高清標準為1920×1080分辨率,現在的4K像素水平是之前的4倍,面臨著許多方面的挑戰,同樣,膠片拍攝將從原先耳朵35mm膠片升級到70mm,面臨的是全行業標準設備的升級。但是4K分辨率的數字視頻拍攝能力僅要求傳感器達到1200w像素,以及能夠與之匹配的圖像處理能力,這一點行業內已經有成熟的配套解決方案(比如高通的Snapdragon Flight平臺不僅支持4K錄制,還支持4K的立體VGA錄制),因此,也并不構成技術壁壘。
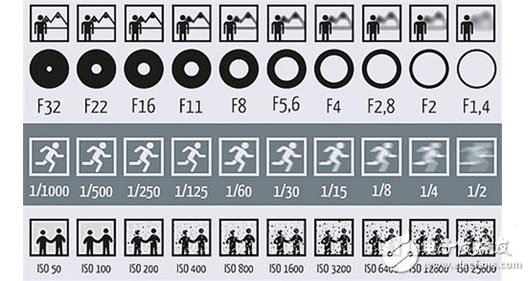
光圈大小:光圈大小直接影響到通光量的多少,對于成像質量有較大影響,目前,移動類消費電子的攝像頭模組已經從f/2.4、f/2.2、f/2.0逐漸增大(數字越小,光圈越大),目前手機市場上也已經開始大面積出現f/1.8的攝像頭模組了。
光圈增大對于拍攝成像來說主要有兩方面優勢:1、提高弱光下畫質;2、提高快門速度;3、減小景深。
對于航拍應用來說,提高弱光下畫質(夜景拍攝)以及提高快門速度(運動拍攝)都是很有必要的,而減小景深則在人像拍攝時能夠較好的虛化背景,突出主體,這種需求對于目前以大景物對象拍攝為主要使用目的的無人機來說屬于錦上添花的功能,但是對于自拍無人機來說,是十分必要的。比如主打自拍的Dobby無人機就采用的f/1.8光圈,而大疆的精靈4則采用的f/2.8光圈。
但是從現有行業技術水平以及產品策略上來看,光圈的提升也并不是沒有代價的:
1)、大光圈的進光量增大后,首先需要配套提高的是快門速度。在黑暗環境中,本來光線較弱,快門速度不需要提高很多即可保證拍攝質量。但是,在白天或者光線較強的環境下,考慮到無人機或者移動電子設備通常采用的是固定光圈,并不能調整到合適的小光圈,因此必須要將快門速度提高從而避免過度曝光,但從目前的技術水平來看,快門速度的提高還存在一些技術瓶頸,這也是小型化設備上制約光圈增大的一個重要因素。
2)、光圈增大同樣還會引起圖像畸變以及邊緣畫質下降。為了校正邊緣畫質的下降以及圖像畸變,通常都會采用更多的鏡頭組以及鏡頭部分的機械結構,這對于小型設備來說,是難以實現的(比如iphone6以后的設備為了實現f/1.8的光圈以及相關的一些其他技術考慮,攝像頭高度增加,且遠高于機身,凸出于外部)。當然,小型化的考慮在無人機上還不是一個特別大的問題,但是技術實現可能會有一定的門檻。
傳感器技術:傳感器技術目前主要是索尼、OmniVision、三星幾家公司,尤其是索尼公司,其所推出的IMX220/230/240等系列傳感器幾乎占到了市售手機的大半壁江山蘋果、三星、索尼、華為、小米、魅族等熱門旗艦機幾乎都是采用的IMX系列傳感器。因此,在無人機上的應用也只需要根據無人機的定價策略來選擇相應產品即可。傳感器技術主要涉及到傳感器尺寸和傳感器結構方式兩部分技術。
ISP技術:ISP(Image Signal Processing)也即圖像處理技術,鏡片、傳感器構成了圖像的接收裝置,而ISP則構成了圖像的采集和預處理,面對目前越來越高的全尺寸高幀頻的數據吞吐能力要求,ISP技術也在不斷提高。除了高速拍攝、雜噪抑制以外,相機還可以借助ISP處理器對圖像做出比較重大的調整,HDR技術就是一個很明顯的例子。
HDR技術是ISP技術的一個主要應用,其可以通過采用不同的曝光策略連續拍攝數張照片,并通過ISP處理器對幾張照片進行合成,保留了暗部和高光的細節,大大增強了畫面的層次感,如果這一合成算法是由手機自身的處理器完成的話,勢必加重處理器負擔,而且考慮到圖像處理的特殊性,可能效果并不完美,從而很多廠商設立了獨立的ISP處理器,專門對照片進行預處理。還可以ISP技術還可以對畫面的整體渲染效果做出調整,不同的廠商有這不同的調教傾向。
自動對焦技術也是ISP的一個主要功能。目前主要有三種主流的自動對焦方式,分別為:反差對焦、相位對焦、激光對焦。這三種對焦方式,尤其是反差對焦,需要對圖像進行全景掃描處理,ISP資源消耗巨大;相位對焦也需要對圖像進行實時處理,雖然計算量小,但是速度要求較高,同樣對ISP有能力要求。
因此,不論從成像觀感、自動對焦拍攝使用等角度來看,ISP技術都對拍攝成像有較大影響。
從上面的分析可以看出,影響最終成像質量的因素很多,而且很難通過單一調整參數提高整體水平,因此,攝像頭模組的設計是一個相當考驗工業設計水平的核心技術領域,從目前的現狀來看,國內無人機廠商對于這一領域的探索還較為初步。但是,必須要注意到的一點是,目前攝像頭模組技術的發展從某種意義上來說確實已經相當成熟。成像技術對于性能的提升,大部分都在專業領域內才能顯現出差異,對于一般消費者來說,對于使用體驗的提升并不明顯,成像技術對于最終畫質提升邊際效應應該還是較弱。
我們認為,成像技術固然重要,但是按照目前的成熟度和提升潛力來說,專注于無人機拍攝平臺的穩定技術相比于成像技術來說,對使用感受的提升更為明顯。
機載平臺穩定技術
四旋翼無人機之所以在航拍中得到廣泛應用,很大一部分原因是其所具備的穩定性以及操作的簡易性。其中,穩定性對于航拍來說,更是至關重要。
1.在拍攝視頻時,畫面的抖動、傾斜都會嚴重影響畫面的流暢度和美觀度;
2.在拍攝照片時,尤其是弱光情況下,如果曝光時間較長,機身的抖動會引起畫面的模糊;若減少曝光時間,則需要提高感光度,噪點增多,影響畫質。因此,機身的穩定對于拍攝來說至關重要。
影響機身穩定的主要因素
在分析機身穩定技術之前,首先需要確定,對無人機機身穩定造成主要影響的來源有哪些? 按照當前四旋翼無人機的典型情況,可以將對于機身位置、姿態造成擾動的幾個因素歸結如下:1、懸停定位不精確造成的水平位置以及高度的飄逸;2、機體作動時的機身傾斜與抖動;3、電機震動、突風等帶來的干擾。對于不同類型的擾動,無人機系統上采取了不同的策略進行應對。
對于水平以及高度的飄移,在室外,也即GPS信號良好的情況下,無人機會主要根據GPS信號進行定位。但是限于民用GPS系統自身的精度有限且更新頻率較低,單純依靠GPS系統進行定位較為困難,通常無人機還會引入慣性模組進行組合定位。當處于室內或者GPS信號接收受限的情況下,無人機系統還采用對地攝像頭進行光流定位。光流定位是一項近年來興起的基于圖像的定位方式,在距離地面較勁時,使用效果良好。

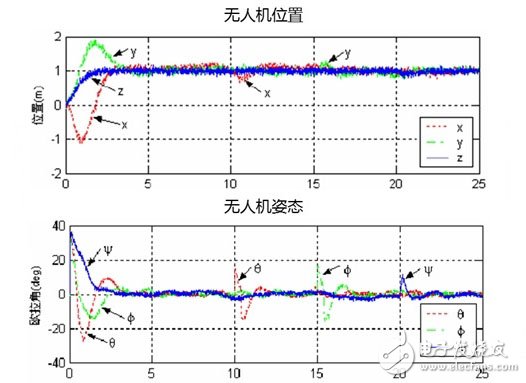
如果說位置的飄移屬于慢動態的擾動,那么無人機機動時所引起的機體傾斜、抖動則是高頻擾動因素,對于畫面的影響十分顯著。下圖為一組四旋翼無人機的仿真曲線,可以看到,當需要進行位置移動時,四旋翼機身姿態必須做出較大調整,尤其是在機動剛發生時,機身姿態出現了40度的調整。
對于機身在水平方向移動時所帶來的機體傾斜,以及機體作動時的抖動等干擾因素,對圖像拍攝效果影響較大,必須通過掛載穩定云臺抵消影響。
對于電機震動、突風擾動等因素,考慮到其屬于較高頻擾動,可采用空心橡膠球彈簧進行高頻震動濾除,即可取得較好的效果。對于突風等干擾,由于其形式、大小均存在較大的隨機性,很難保證完全消除影響,只能考慮結合云臺、光流等多種形式對其影響進行抑制。
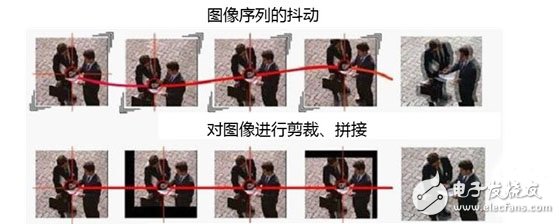
最后,不能忽略的一個技術是電子穩像技術。電子穩像技術是在不借助機械設備的前提下,通過傳感器,感受機體運動,從而在顯示畫面上對圖像進行剪裁、拼接的修正,從軟件的角度,一定程度上實現了圖像穩定的意圖。在這一方面,運動相機GoPro是最早成功推出產品進行技術應用的,其所推出的GoPro Hero系列運動相機,具有較為良好的電子穩像人能給力,也憑借這項技術,在運動相機市場占有了較大份額。
但是電子穩像技術通過對抖動后的圖片進行處理,天生就不具備先發優勢,是一種被動的后期處理方式。因此,可能會帶來一些比較明顯的問題也即所謂的“黑邊現象”,如下圖所示:
總的來說,電子穩像技術雖然補救能力有限,但是作為一種微調或者修正措施,是經常選用的,出了大疆的Mavic以外,目前市售航拍無人機基本都采用了“機械云臺+電子穩像”兩條腿走路的思路。只有沒搭載云臺的小型自拍無人機才會只采用電子穩像技術。
精準懸停定位是航拍基本能力
從近一年來發布的消費級無人機來看,基本都配置了“GPS+光流”的室內/室外定位策略。尤其是對于今年以來發布的幾款自拍無人機,因為主打自拍,應用場景里多考慮室內環境下的拍攝,更是都標配了光流定位系統。
按照目前的技術,以及這一年來推出的產品狀態,在室外GPS信號良好的情況下,利用GPS進行懸停定位已經可以達到米級或者米以下的定位精度。而且,許多產品現在都標配了GPS/GLONASS甚至是北斗等多套系統。成本的下降以及多年來的應用推廣,使得目前無人機用GPS定位技術比較成熟。

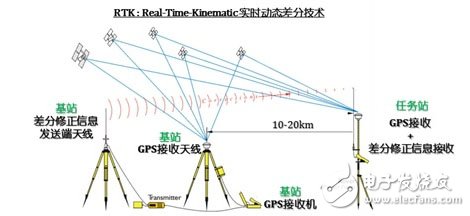
另外借助目前市場上比較成熟的差分GPS技術也可以實現GPS的精度大大提升。差分GPS技術,即通過在無人機工作區域內某個已知坐標點設置一個高精度GPS基站作為參考點,根據測量與實際位置的差分信號作為修正量,修正無人機上的GPS信息,目前差分技術主要分為偽距差分(DPGS)與載波相位差分(RTK)兩種,DGPS可以達到亞米級精度,RTK則可達到厘米級精度。
但是這種差分GPS方式需要另外架設設備,切對架設的基站點位置有較高精度要求,因此成本高且不容易實現,比較適合于在給定作業場地內進行拍攝的適用場景,對于一般消費級航拍無人機上的使用較為受限。
雖然光流的概念早在1950年就被提出,但是光流技術是隨著光流定位算法在今年來不斷發展成熟后才在無人機定位上大面積得到應用。光流的概念是Gibson在1950年首先提出來的。它是空間運動物體在觀察成像平面上的像素運動的瞬時速度,是利用圖像序列中像素在時間域上的變化以及相鄰幀之間的相關性來找到上一幀跟當前幀之間存在的對應關系,從而計算出相鄰幀之間物體的運動信息的一種方法。一般而言,光流是由于場景中前景目標本身的移動、相機的運動,或者兩者的共同運動所產生的。
在無人機應用中,無人機機身加裝對地的光流攝像頭,根據所觀測到的地面圖像來進行定位的,其原理可通過下圖進行理解:無人機在相對地面移動時,其對地觀測鏡頭所拍攝到的畫面會相對向反方向“移動”,根據無人機距離地面的高度(這也是光流傳感器都與對地超聲波傳感器成對出現的原因)以及對地觀測圖像中像素移動的量,即可推算出無人機相對地面移動的距離。
當無人機采用光流定位技術實現自身位置確定后,即可采用通用的控制算法實現水平面和高度上的定位。目前所采用的光流技術,基本上可以實現室內環境的穩定懸停,但是隨著時間的累積,仍然會有十幾厘米到幾十厘米范圍的飄移。不過,這種低頻率、小幅度的位置改變對于航拍來說,是可以接受的。

雖然室外“GPS+光流”、室內“光流”的技術方案是成熟的,而且相比于之前的室外定位方案來說,有了大幅度的提升。但是各家廠商對于具體算法實現起來,其產品的最終使用效果,仍然存在差異。
以大疆精靈4與其上代產品精靈3進行對比,兩款產品在懸停定位的從技術方案來說,是基本一致的,但是精靈4屬于精靈3的下一代產品,在算法上、傳感器上都有了較多的調整。本報告對TomsTechTime網站提供的一段,大疆精靈4與精靈3的室外懸停錄像進行了整理,我們發現,精靈4在室內高度懸停上,可以達到0.1m以內的精度,而精靈3僅有0.5m左右精度,水平面上亦是同樣,精靈4能夠穩定在較小的范圍內實現懸停,而精靈3則在一個較大范圍內飄移。
這個例子很明顯的告訴我們,即使采用同樣的技術方案,但是在傳感器、算法等方面仍然對最終使用效果產生巨大影響。這也如我們在上一期報告中提到的一樣,雖然光流定位技術已經有大量開源庫支持,看似降低了技術門檻,但是實際上,在獲得更好的用戶體驗上,也即深挖技術價值這方面,各個公司都還有很多路要走。因為當產品的實際使用體驗較差時,采用的技術再先進,也很難受到市場追捧。

靈活穩健云臺是航拍核心
根據上面的介紹,我們知道,云臺對于抑制機身的主動傾側、被動干擾等影響航拍效果的擾動起到了重大作用,下面將對無人機機載云臺進行簡要的介紹。
一般說的機載云臺通常都是三軸云臺。如下圖所示,三軸云臺的“三軸”分為俯仰、偏航、滾轉三個軸,也稱三個自由度,分別有一個電機進行控制。也即攝像頭在三自由度云臺的框架上通過電機的控制,可以實現與無人機三個自由度的解耦(值無人機的:俯仰、偏航、滾轉三個自由度),起到隔離、抵消無人機運動影響的作用。
三軸云臺技術主要包含部分內容:1、運動敏感;2、抵消控制。
運動敏感:需要安裝在最內層的攝像頭部分能夠感知到攝像頭的姿態偏差。通常會安裝一個三自由度陀螺儀。
抵消控制:即當敏感到攝像頭要偏離設定的姿態(一般是水平狀態)時,通過電機施加反向的運動,抵消運動變化。
從以上角度來看,傳感器的精度、頻率以及電機輸出的精度、功率大小,控制算法的性能都對最終效果起到比較大的影響。不過從目前的產品技術來看,紙妖配備了三軸云臺的無人機在航拍方面基本不存在太大使用感受上的區別。單從功能上來說,比較關鍵的幾個因素是1、云臺與機身隔離度的高低;2、云臺可控的角度范圍;3、響應的快慢;4、精度的高低。但是目前各家公司基本都沒有單獨公布出云臺的技術參數,還很難進行比較。

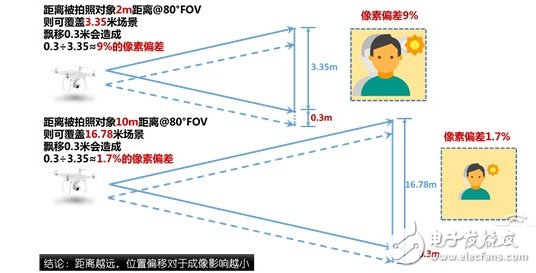
位移補償:精靈4與精靈3的懸停對比實驗中看到,即使采取了較好的GPS+光流定位技術,無人機在定位懸停拍攝時,還是會出現較大幅度的飄移,幅度大概為0.3m左右,當發生位移后,畫面中心會有那么為了進一步保證畫面的穩定,就必須引入機械云臺對畫面進行穩定。
通過簡單的幾何計算可以看出,當相距被拍攝物體距離較近時,水平飄移對畫面影響較大。以圖中所標注為例:當距離背景2米遠時,0.3米的飄移可能會帶來拍攝畫面中,物體的像素移動達到9%左右(比如4000X3000分辨率,圖像水平方向會飄移360像素)。但是當距離被拍攝物體較遠時,以圖中所標注為例:當距離背景10米遠時,0.3米的飄移可能會帶來拍攝畫面中,物體的像素移動達到1.7%左右(比如4000X3000分辨率,圖像水平方向會飄移68像素)影響較小。
這時,僅需要云臺偏轉較小的度數既可修正畫面偏移,使得被拍攝物體重新回到畫面中心。
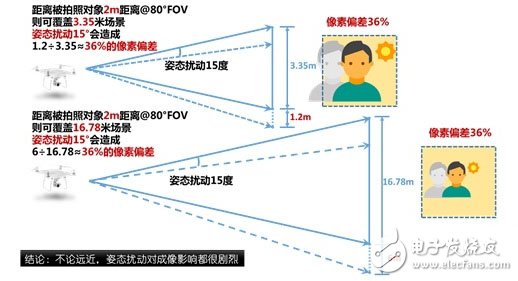
姿態補償:相比于無人機位置的移動,無人機自身姿態的擾動對畫面影響更為劇烈。當相距被拍攝物體距離較近時,以圖中所標注為例:當距離背景2米遠時,15°的姿態擾動可能會帶來拍攝畫面中,物體的像素移動達到36%左右(比如4000X3000分辨率,圖像水平方向會飄移1440像素)。但是當距離被拍攝物體較遠時,以圖中所標注為例:當距離背景10米遠時,15度的姿態擾動可能會帶來拍攝畫面中,物體的像素移動同樣達到36%左右(比如4000X3000分辨率,圖像水平方向會飄移1440像素)影響均較大。
但是另一方面,從用戶體驗角度來說,云臺技術還涉及到幾個問題:1、云臺功耗。由于三軸云臺帶有三個無刷電機,而且云臺實時在空中實時運行,因此其功耗不可小視。2、云臺校準。從一些用戶反饋來看,云臺功耗對于整機續航已經產生了明顯的影響,如何在保證云臺性能不變的情況下優化云臺控制電機的功耗會是一個有意義的研究方向。另一方面就是云臺校準,因為云臺上裝有三軸陀螺儀等慣性測量原件,如何在出現故障或者干擾的情況下對云臺進行快速有效的校準也是影響用戶使用的一個重要問題。
從目前市售產品來看,帶云臺和不帶云臺的產品明顯的分為兩類:大中型的高端無人機和小型的自拍無人機。
從各家的旗艦產品來看,基本都配備了性能優異的三軸云臺,比如大疆的精靈系列、悟系列、昊翔的Typhoon系列;同時,在上一份報告中,我們提到了,零度的Dobby、零零無限的HoverCamera、昊翔的Breeze等小型自拍機因為成本、技術等因素都沒有配備云臺。
可以看到,由于技術和成本以及便攜性的因素,是否標配云臺成了小型無人機和大型無人機(350mm軸距)的分水嶺,綜合之前介紹的云臺的重要性,我們看到了,小型無人機的價值主要體現在了便攜一方面,而大型無人機則主打功能的強大完善,Mavic、Karma這樣的中型無人機功能更加完善,而且便攜性突出,是目前消費級杭派無人機市場上比較看好的發展方向。
小型自拍無人機短期內格局不會顛覆
綜合上面對Mavic的介紹以及航拍技術的分析,我們不難總結出幾個觀點:1、短期來看,大疆不僅將對傳統航拍機繼續占有霸主地位,還將對于小型機市場占有較高統治力。2、純便攜小型機在功能上缺失太多,未來發展還缺乏更有力的技術支撐;3、中小型無人機平衡便攜性與功能性,或可成為未來市場熱點。但是放眼未來,可以看到整個行業的機會還是存在的。
1、價格 從市售產品的性價比的角度來講,大疆的Mavic無疑是具有超高性價比,但是從價格這一角度來看,消費級無人機5000元以上的價格距離大眾普及還有一段距離,而且大疆的產品定價策略向來是“高附加值+超額利潤”,可以看到,大疆的定價背后包含了大量的品牌維護、管理費用等,但是這些對于小平臺公司的花銷其實并不大,所以,如果未來有產品能夠達到大疆的技術水平,而且價格能夠降低到5000元左右,那么市場反響一定很值得期待!
2、技術 大疆的視覺方案有部分是來自于Movidius公司,比如Mavic的VPU就采用的Movidius的Myriad 2視覺處理組件。Movidius公司的視覺處理器具備了低耗高能的特點,能夠主動不間斷地拍攝圖像并處理信息,這能夠賦予聯網設備感知環境的能力,是物聯網設備更加智能化的關鍵。谷歌能感知環境的智能手機Tango采用的就是Movidius的第一代芯片。去年7月,Movidius推出的Myrid 2芯片,這款芯片擁有12個可編程的核心、一個圖像信號處理器(ISP)和硬件加速器,效率是上一代的20倍,體積更小,而且每秒只消耗500毫瓦。Myriad 2能夠讓智能手機攝像頭在某些程度上達到單反的水平,比如對焦速度、低光成像表現;但更核心的,是對圖像的智能識別與理解,使得其芯片可以應用在眾多需要處理圖像的設備上。
值得注意的是,Movidius公司今年9月剛剛被英特爾斥資4億美元收購。意欲將Movidius技術應用到Intel的Realsense技術上。而Intel公司去年向國產無人機廠商Yuneec投資過6000萬美元,且Yuneec推出了搭載Realsense技術的Typhoon H480,雖然目前Realsense僅用來實現避障,但是期待未來和Movidius的結合能夠給Typhoon帶來更多的技術應用。
3、行業級應用 大疆的成功來自于先發優勢、技術儲備、資源整合等多個方面的綜合,目前市面是的其他廠家在整體競爭力上可能比大疆還有差距,但是各家都有各自的看家本領,比如零度主打的“軍轉民”高可靠性飛控技術等,那么在未來,未來在消費級自拍無人機市場經歷過爆發期后,市場趨于穩定,而行業級市場這片廣闊的天地還有待開發的背景下,不妨關注各家的行業級應用,或可成為下一個爆點。
從智東西的視角觀察行業,無人機領域各家公司都在尋找下一個機遇。
當業內人士均將目光瞄準小型無人機時,無疑這必將掀起行業新趨勢。然而小型無人機總體而言在產品技術上相較當前的主流機型差異化并不大,而性價比卻成了其關鍵的競爭因素。









 工商網監
工商網監
評論