關于無人機的技術壁壘,目前民用方面主要是續(xù)航跟遙控兩部分,而這兩項技術瓶頸在軍用無人機方面并不存在,因為目前頂尖軍用無人機是是用航空燃料作為續(xù)航動力的,而且在遠程操控方面是通過衛(wèi)星遙控的。
2016-04-27 11:07:12 13744
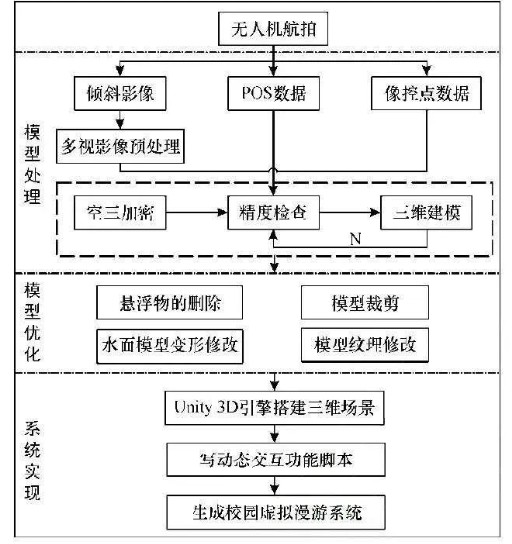
13744 本文將無人機傾斜攝影建模技術應用于在虛擬現(xiàn)實中,其應用系統(tǒng)設計流程如圖 1 所示。具體步驟為:
2020-09-27 11:40:451455 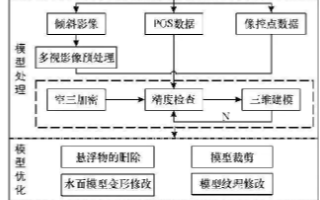
2015年,隨著無人機爆發(fā)式的增長,國內外無人機企業(yè)紛紛展開了全方位的角逐,各種層出不窮的新技術也相繼登場。市場上的競爭說白了還是技術上的積累與比拼,那么,問題來了,今年無人機企業(yè)在技術發(fā)展上做出了哪些創(chuàng)新與實踐呢?哪些技術能在無人機技術瑯琊榜上留下一筆呢?
2020-05-11 08:25:02
與無人機測控 無人機系統(tǒng)作為國家先進科技水平的綜合體現(xiàn),涉及眾多學科。如果寬泛分類考慮,這些學科為無人機產業(yè)提供了兩大類關鍵性技術,分別是航空技術以及信息技術。航空技術與信息技術的融合催生了無人機產業(yè)的興起
2019-08-15 08:00:00
無人駕駛分級無人駕駛汽車關鍵技術
2021-01-21 07:13:47
無人駕駛汽車開發(fā)的關鍵技術主要有兩個方面:車輛定位和車輛控制技術。這兩方面相輔相成共同構成無人駕駛汽車的基礎。
2020-03-18 09:02:01
由于無人機不必設置有人機那樣的很多設備(如彈射逃生系統(tǒng)),使得無人機的外形設計更為緊湊、體積更小,肉眼和雷達都難以發(fā)現(xiàn),從而也降低了損失率。在現(xiàn)代的高科技戰(zhàn)爭中,無人機成功地用于戰(zhàn)場偵察和電子對抗
2011-03-07 17:31:06
無人機開源程序
2016-04-11 16:28:39
` 本帖最后由 liuyongwangzi 于 2015-4-28 15:32 編輯
隨著科技不斷發(fā)展,無人機已然成為時下的熱點,相關電子設計也逐漸被工程師所親睞,如無人機遙感技術、無人機航
2015-04-28 15:19:35
正在影響和改變這個社會。無人機集多種傳感器與一身,無人機技術與當前最火的人工智能、物聯(lián)網(wǎng)技術是相同的,更符合當前技術潮流和趨勢。它一個數(shù)模混合軟硬結合,且具有系統(tǒng)性的工程項目,能培養(yǎng)初學者系統(tǒng)架構的能力
2017-11-15 11:57:36
項目需要調研一下無人機三維建模的信息無人機三維建模核心技術是三維重建,或者說基于圖片的建模(Image-Based Modeling)。項目需要是建立園區(qū)的三維模型,其他應用上可以用于古街道、文物
2021-09-16 06:55:27
無人機中基于stm 32的電機拉力測試系統(tǒng)怎么編程呀
2018-06-15 11:26:57
一般,可做旋轉運動或直線式移動。目前國內無人機攝影裝置產品,普遍使用無刷電機作為三軸云臺運動控制馬達,但是方案體積大,扭矩小,運動速度相對慢,應用的云臺拍攝視頻的過程中,由于無人機飛行過程中具有抖動
2021-09-01 07:09:55
的年均增長率將是整個領域中最高的。電子反無人機系統(tǒng)也非常適合用于公共地區(qū),相對激光以及傳統(tǒng)的反無人機系統(tǒng)而言,電子反無人機系統(tǒng)的成本也更低。當前,全球反無人技術與裝備發(fā)展逐漸成熟,對無人機的探測
2016-09-26 11:38:06
和反制系統(tǒng),反無人機,反無人偵測,無人機偵測,無人機反制 深圳市吉赫茲電子有限公司專注于電磁頻譜監(jiān)測、信號地理定位、無線通信的研發(fā)和應用。吉赫茲電子在無人機偵測和反制領域擁有多項核心技術,并擁有自主
2017-04-05 10:15:19
隨著科技的飛速發(fā)展,無人機技術已成為現(xiàn)代空域管理領域的一股新興力量。無人機全景監(jiān)測以其高效、精準的特點,正逐漸成為提升空域管理效率的關鍵。知語云智能科技在這一領域的前瞻性研究和應用,為航空安全和管理
2024-02-20 15:23:56
。那就是以大功率信號為能源,向目標發(fā)射設備,以暴力干擾無人機的飛行,只能在特殊情況下使用。目前反無人機系統(tǒng)普遍采用的技術方法是發(fā)射射頻信號干擾無人機,阻止無人機與地面遙控裝置的通信聯(lián)絡。深圳市特信電子
2022-09-13 11:03:53
摘要:介紹了飛行監(jiān)控系統(tǒng)軟件的組成、設計原理和工作流程,以及采用的關鍵技術,并說明了系統(tǒng)在聯(lián)試過程中出現(xiàn)的問題和處理方法﹔飛行試驗結果表明,本系統(tǒng)能夠實時顯示無人機的飛行姿態(tài)、飛行軌跡、位置及參數(shù),實現(xiàn)任務航線的編輯、裝訂與顯示,發(fā)送飛行控制指令,實時性高,操作方便,連續(xù)工作48小時無異常。
2023-09-18 08:43:48
` 無人機是如何上升的?`
2019-08-28 16:27:19
` 無人機應用技術專業(yè)前景怎么樣?`
2019-08-28 16:38:40
` 誰來闡述一下無人機應用技術專業(yè)如何?`
2019-08-28 16:31:41
` 誰來闡述一下無人機應用技術專業(yè)屬于什么大類?`
2019-08-28 16:48:27
` 誰知道無人機應用技術專業(yè)是找什么工作的?`
2019-08-28 16:42:18
杜克大學教授和該所大學人類和自治實驗室主任米西·卡明斯經(jīng)常想象無人機快遞到來的那一刻,她喜歡想象自己八歲的兒子看到無人機落在自己家后院時的反應。卡明斯說:“如果無人機出現(xiàn)的話,他一定會向無人機扔石頭,這是人的本性。”
2020-05-06 08:27:33
誰知道無人機怎么懸停的嗎?
2019-08-27 15:50:10
` 雷達系統(tǒng)很難識別出小型無人機和緊貼地面飛行的無人機。“事實證明,使用現(xiàn)有技術很難識別和減輕無人機威脅。” 那么針對無人機的探測存在哪些難點呢?電磁干擾會降低射頻傳感器探測能力。在城市環(huán)境中,有
2020-07-29 07:36:49
無人機控制系統(tǒng)原理是什么?
2021-11-08 08:24:27
程度產生了一次“完美風暴”,電子技術的進步以及大批量普及驅動成本降低,在過去幾年中見證了無人機的流行和快速增長。廉價、輕便的基于微控制器的飛行控制器、加速度計和陀螺儀等傳感器、全球定位系統(tǒng)和攝像頭
2019-02-21 18:18:23
如今,我們經(jīng)常在很多公園或空曠場所看到有人玩那種小型無人機,每次看它們拿著手里的遙控器,讓無人機自由翱翔于空中,這種感覺很“酷炫”,可是您知道無人機的工作原理嗎?
2021-01-13 06:34:07
的出現(xiàn)的確改變了我國的農藥防治現(xiàn)狀,如今國內的植保無人機在由于其卓越的性能,受到了各級***及企業(yè)的一直看好,所研發(fā)的機型也逐漸豐富、應用范圍變廣、推廣速度加快、技術研究越來越深入。那么到底什么是植保
2019-06-28 10:06:03
上周,第十七屆高交會無人系統(tǒng)展分會場——中國(深圳)國際無人系統(tǒng)技術成果交易展覽會在深圳完美落幕。素有高新技術領域的“行業(yè)風向標”、“技術風向標”和“創(chuàng)新風向標”之稱的高交會,點燃了無人機世界
2020-08-20 06:58:58
和遙感應用技術,具有自動化、智能化、專用化快速獲取國土、資源、環(huán)境等空間遙感信息,完成遙感數(shù)據(jù)處理、建模和應用分析的應用技術。無人機遙感系統(tǒng)由于具有機動、快速、經(jīng)濟等優(yōu)勢,已經(jīng)成為世界各國爭相研究的熱點
2018-11-01 11:22:47
,能夠實現(xiàn)自動化、智能化、專用化快速獲取國土資源、自然環(huán)境、地震災區(qū)等空間遙感信息,且完成遙感數(shù)據(jù)處理、建模和應用分析的應用技術。無人機遙感系統(tǒng)由于具有機動、快速、經(jīng)濟等優(yōu)勢,已經(jīng)成為世界各國爭相
2016-03-11 07:59:06
`圖片來自新浪軍事現(xiàn)在無人機越來越多,現(xiàn)在經(jīng)常可以看到有一架無人機在窗口晃來晃去,如何對這種無人機進行處理?打下來的話可能會砸到人,可以誘捕嗎?`
2015-06-05 11:54:05
摘要:無人機(UAV)是無人駕駛飛機的簡稱,是指利用無線電遙控設備和自備的程序控制裝置操縱的不載人飛行器。無人機最初誕生在一戰(zhàn)時期,作為靶機使用。而經(jīng)過幾十年的發(fā)展,由于通信技術的飛速發(fā)展,無人機
2021-07-21 08:03:24
BIM與GIS結合—無人機傾斜攝影三維建模方法詳解
2020-06-19 11:17:05
無人機的市場規(guī)模和范圍持續(xù)蓬勃發(fā)展,新應用程序不斷涌現(xiàn)。無人機的應用也越來越普遍,無論是運送郵件還是包裹、為兒童和老年人提供娛樂、安全監(jiān)控、農業(yè)或工業(yè)管理,或開辟航空攝影的新視野。
2019-08-01 06:13:06
無人機的市場規(guī)模和范圍持續(xù)蓬勃發(fā)展,新應用程序不斷涌現(xiàn)。無人機的應用也越來越普遍,無論是運送郵件還是包裹、為兒童和老年人提供娛樂、安全監(jiān)控、農業(yè)或工業(yè)管理,或開辟航空攝影的新視野。
2020-08-06 07:27:20
McWiLL系統(tǒng)概述McWiLL系統(tǒng)的關鍵技術McWiLL系統(tǒng)的優(yōu)勢McWiLL系統(tǒng)的應用
2020-11-24 06:57:16
的作用及無人機GPS模塊選型的問題,SKYLAB君都可以輕松為你解答。無人機無人機GPS模塊的作用對無人機有研究過的工程師們必然都清楚:GPS定位系統(tǒng)是支撐無人機安全飛行的關鍵技術之一。無人機在進行視頻
2017-06-22 17:00:46
申請理由:申請用來于《基于無線通信技術的無人機應急救援系統(tǒng)研究》,該課題研究經(jīng)費有限,但是社會意義重大,可以造福社會,建設和諧社會,希望得到該開發(fā)板,盡快完成該項課題。項目描述:利用無線通信技術
2015-07-07 08:46:03
申請理由:申請用于《基于無線通信技術的無人機應急救援系統(tǒng)研究》,該課題研究經(jīng)費有限,但是社會意義重大,可以造福社會,建設和諧社會,希望得到該開發(fā)板,盡快完成該項課題。項目描述:利用無線通信技術
2015-07-07 08:51:27
/20170131479278.html2.無人機遙感系統(tǒng)的研究進展與應用前景http://www.1cnz.cn/soft/study/ms/2017/20170131479275.html3.基于信息一致性
2017-02-15 21:06:18
“如果飛控被稱為無人機的大腦,那么圖傳系統(tǒng)就可以比做無人機的“眼睛”。”深圳優(yōu)鷹科技蔡英杰博士曾在接受宇辰網(wǎng)專訪的時候這樣形容無人機的圖傳系統(tǒng)。最近,一篇《摘掉有色眼鏡來聊一聊:為什么億航VR眼鏡
2019-08-09 08:20:07
技術不斷發(fā)展,大多反無人機技術都采取嚴格的保密措施,防止技術外泄。不過,從一些公開報道中仍可以對其有所了解。按照發(fā)揮作用的不同,當前的反無人機技術主要分為兩種:一是檢測跟蹤系統(tǒng),二是阻截系統(tǒng)。檢測跟蹤
2022-09-08 10:10:18
, 從而迫使無人機自行降落或者返航。信號干擾一般來說,干擾阻斷的最簡單直接的方式是信號干擾,這種方式技術含量相對較低,成本較少。目前市面上大多數(shù)無人機均采用GPS衛(wèi)星導航系統(tǒng)與慣性導航系統(tǒng)相結合的方式
2022-08-25 11:57:01
由交通部和美國聯(lián)邦航空管理局成立的特別小組錦衣新的和現(xiàn)存的無人機到聯(lián)邦***注冊。該任務小組包括無人機行業(yè)和航空安全社區(qū)的成員,提出重量超過250克的無人機必須注冊。
2020-05-12 06:23:14
``最近看到一款無人機能實現(xiàn)整機防水,是全球首家能量產發(fā)型的防水無人機, 就連當初火爆一時的Lily主打防水,最終計劃流產。看來無人機做防水,確實是有點技術難點!推薦課程:張飛四旋翼飛行器視頻套件
2018-01-06 15:25:15
無人機QX5.0-P圖)QX5.0-P搭載了天途航空研發(fā)的第二代測繪用無人機高精度傾斜攝影系統(tǒng),該航測無人機在天途第一代傾斜攝影系統(tǒng)的基礎上進行了技術性升級,采用高品質定焦鏡頭、優(yōu)化了相機鏡頭布局
2017-06-12 17:19:47
如何設計出一個利用PPM控制無人機動作的四軸無人機?
2021-09-23 06:47:19
測繪,無人機植保,無人機監(jiān)控,無人機生產,無人機研發(fā)等。無人機高薪就業(yè)是您最理想的選擇。北方藍天無人機培訓學校為企業(yè)培養(yǎng)有思想的技術型人才!!聯(lián)系電話4oo-885-0313,聯(lián)系地址:北京市昌平區(qū)白浮泉路l7號
2016-12-15 09:46:19
本文主要介紹了一種基于PC104無人機的視頻系統(tǒng)構建方法和流程。
2021-06-07 06:01:21
行業(yè)的進步離不開技術的創(chuàng)新,就在感知規(guī)避、GPS跟隨、室內視覺定位等技術的熱度還未消退之時,又一批新銳技術已經(jīng)登上歷史的舞臺。下面宇辰網(wǎng)獨家整理了無人機領域的五大新銳技術,看看你知道多少?
2020-08-21 06:59:20
求無人機入門技術推薦課程:張飛四旋翼飛行器視頻套件,76小時吃透四軸算法http://t.elecfans.com/topic/40.html?elecfans_trackid=bbs_post
2017-03-12 13:17:04
摘得的重要獎項。現(xiàn)在,新聞攝影界不得不承認一個事實的存在——短短幾年時間,無人機航拍就已成為崛起在新聞攝影領域的新勢力。可見,在新技術面前,誰敢于張開雙臂擁抱新事物,誰就有機會在時代浪潮中贏得主動和先機
2016-06-03 10:55:52
隨著科技的飛速發(fā)展,無人機技術在各個領域的應用日益廣泛,但隨之而來的是無人機威脅的不斷升級。為了有效應對這些新興威脅,知語云智能科技推出了先進的無人機防御系統(tǒng),為空中安全保駕護航。
無人機防御系統(tǒng)
2024-02-26 16:35:59
的準確性,也為后續(xù)的無線電干擾和激光打擊提供了精確的目標定位。
無線電干擾技術則是反制無人機系統(tǒng)的關鍵所在。通過發(fā)射特定頻率的無線電信號,能夠干擾無人機的通信鏈路,迫使其失去控制或返航。這一技術在保護重要
2024-02-23 11:37:07
,無人機反制技術可用于保護重要設施、維護公共秩序和保障航空安全。例如,在機場、核電站等關鍵設施周圍部署無人機反制系統(tǒng),可有效防范無人機威脅。
四、無人機反制技術的發(fā)展趨勢
隨著技術的不斷進步,無人機反制
2024-03-12 10:42:46
隨著科技的飛速發(fā)展,無人機技術已經(jīng)滲透到我們的日常生活中,無論是航拍美景、農業(yè)噴灑、快遞配送,還是災害救援、軍事偵察,無人機的身影都越來越常見。然而,隨著無人機使用的普及,其安全問題也日益凸顯
2024-03-12 11:13:32
隨著科技的飛速發(fā)展,無人機技術日益成為當今社會的熱門話題。從最初的軍事偵察到如今的民用消費,無人機憑借其靈活性和高效性,在航拍、農業(yè)、物流等多個領域大放異彩。然而,無人機技術的廣泛應用也帶來
2024-03-12 10:56:16
隨著科技的飛速發(fā)展,無人機已成為航空領域的一股新興力量,廣泛應用于軍事偵察、民用航拍、農業(yè)噴灑等多個領域。然而,隨著無人機技術的普及,無人機反制技術也愈發(fā)受到關注。今天,我們將通過知語云智能
2024-03-12 11:28:20
無人機測控系統(tǒng)的現(xiàn)有技術和新技術,對艦載無人機測控系統(tǒng)的關鍵技術進行綜述,主要包括艦載無人機數(shù)據(jù)鏈通信技術、艦面測控站技術和天線設計技術。
2019-07-18 06:54:16
近日,北京某研發(fā)團隊開發(fā)出了一套基于互聯(lián)網(wǎng)的遠程操控無人機系統(tǒng)“TeleUAS”,通過無人機、專用的網(wǎng)絡通道、遠程端控制軟件,可以讓用戶通過網(wǎng)絡遠程操控異地的無人機,通過機載攝像頭傳回的高清視頻
2020-05-12 07:38:04
,而且這種方式變得越來越流行。不使用無人機的婚禮攝影師的平均時薪是50磅左右,如果你用無人機拍攝婚禮現(xiàn)場,一定可以獲得不少薪酬。9.地形測繪無人機技術還可用于海岸、森林和環(huán)保監(jiān)控以及地理和考古勘測。所以
2017-02-17 15:28:42
非常困難并且價格昂貴的事情,所以目前無人機飛行當中,“黑飛”的現(xiàn)象非常普遍。從技術上看,無人機的續(xù)航時間極其的短,目前大部分的無人機,續(xù)航時間都在30分鐘以下。而且在惡劣天氣下,無人機的飛行穩(wěn)定性是會受
2016-06-08 10:29:24
了通訊功能強大、能夠自動避開障礙物的飛行器。無人機已然迅速成為現(xiàn)象級的熱門產品。那么如此備受注明的產品靠的什么呢?何以實現(xiàn)在無人操作的情況下達到精確目標?下面我們先從不同廠商的遙控系統(tǒng)來分析無人機技術
2016-06-23 11:30:40
樣/取樣說明。服務范圍產品/行業(yè)服務范圍:無人機整機系統(tǒng)、無人機機巢、無人機搭載的相關傳感器等。無人機、飛行器研發(fā)生產廠家。檢測標準可以做的標準均列出(包含上方套
2023-09-21 17:17:23
無人機飛行領域涉及無人機仿真系統(tǒng)建模,無人機系統(tǒng)半實物仿真等相關技術。
2015-11-24 18:27:41 38
38 本站提供無人機航拍傾斜攝影建模視頻教程和配套軟件。如有需要, 可面授培訓無人機操作和內業(yè)處理,教程獲取地址:http://www.bestterrain.cn/productinfo/2842.html
2017-02-15 23:08:1023 無人機傾斜攝影技術憑借快速高效、機動靈活、成本低等優(yōu)勢,正慢慢顛覆傳統(tǒng)測繪的作業(yè)方式,已成為測繪行業(yè)“新寵”,將傾斜攝影技術應用到無人機上,實際就是在做一個三維模型,而建立起來的這個模型更加真實,更加直觀,更加符合實際。
2018-07-19 14:35:2313664 不同的應用環(huán)境下,警用無人機的工作性能有所不同。為了充分發(fā)揮警用無人機應用效能,探索警用無人機的關鍵技術是非常有必要的。本文主要就警用無人機的飛行控制技術、通信技術、避障技術、發(fā)射和回收技術等關鍵技術以及發(fā)展趨勢進行分析,旨在深入理解警用無人機,使其在應用過程中發(fā)揮最大的應用效能。
2018-12-25 10:00:0013 傾斜航空攝影的航線設計采用深圳飛馬機器人科技有限公司的“無人機管家”軟件進行,該軟件集無人機數(shù)據(jù)獲取、處理、顯示、管理及無人機維護于一體,支持多種飛行器的航線設計、監(jiān)控、數(shù)據(jù)快速質檢、4D產品生產等。通過“無人機管家”設計的航線,其相對航高、地面分辨率及物理像元尺寸滿足三角比例關系
2019-01-29 11:30:2314860 
對無人機創(chuàng)始人們來說,需要開發(fā)出足夠強大的無人機交互技術,使得這些無人機即使在不受歡迎的情況下也能有效運作,而這可能將會是關鍵。
2019-09-26 14:40:32845 11月13日至15日,山東省地礦局青島地質工程勘察院采用無人機傾斜攝影測量技術,完成了對“臨朐縣城關街道廢棄采石場治理項目”治理區(qū)的山體建模和DLG的線劃圖等工作。
2019-11-22 16:05:52547 山東省地礦局青島地質工程勘察院采用無人機傾斜攝影測量技術,完成了對“臨朐縣城關街道廢棄采石場治理項目”治理區(qū)的山體建模和DLG的線劃圖等工作。
2019-11-23 09:16:41790 傾斜攝影是目前地理信息采集的重要手段,通過無人機搭載高像素可見光相機并配合自動飛行任務,可以完成三維建模所需數(shù)據(jù)的采集工作。
2020-04-05 17:05:001184 無人機傾斜攝影顧名思義,是無人機搭載了相機,采用了一定傾斜角度來拍攝的,目前比較常見的是搭載五相機和雙相機兩種搭配形式。那么傾斜攝影采用五相機和雙相機究竟哪個好呢?我們從幾個方面來一一分析。
2020-06-02 10:26:201343 攝影測量技術的現(xiàn)狀,對從航攝準備(硬件)到數(shù)據(jù)處理應用(軟件)整個作業(yè)流程的技術標準進行了論述,為無人機傾斜攝影測量技術的從業(yè)人員提供一些參考。
2020-06-03 10:28:333120 無人機的應用技術有很多種,航拍,傾斜攝影都屬于這類技術,下面來讓我們了解無人機傾斜攝影吧。
2020-06-03 10:35:312180 無人機傾斜攝影測量技術以大范圍、高精度、高清晰的方式全面感知復雜場景,通過高效的數(shù)據(jù)采集設備及專業(yè)的數(shù)據(jù)處理流程生成的數(shù)據(jù)成果直觀反映地物的外觀、位置、高度等屬性,為真實效果和測繪級精度提供保證
2020-06-08 14:41:3921254 的所有權和使用權狀況。航空、航天遙感技術手段相比衛(wèi)星和有人機測繪具有相當?shù)膬?yōu)勢,其中的無人機傾斜攝影測量技術已被越來越多的行業(yè)認可和應用。
2020-06-09 11:09:067708 隨著無人機的快速發(fā)展,傾斜攝影行業(yè)迎來了一個新的浪潮,越來越多的人利用無人機從事測繪行業(yè)的相關數(shù)據(jù)采集工作。在數(shù)據(jù)采集過程中遇到了各種各樣的問題,導致飛出來的數(shù)據(jù)不達標,無法完成模型重建工作。這里
2020-06-09 11:12:14708 近年來,隨著國家遙感、測繪技術的迅速發(fā)展,無人機低空攝影測量技術逐漸應用于國家基礎測繪、數(shù)字城市建設、生態(tài)環(huán)境監(jiān)測、國土資源治理等領域。無人機低空攝影測量技術具有快速高效、機動靈活、分辨率高、處理速度快、運行成本低等特點。
2020-08-18 11:52:543792 隨著無人機在空間信息行業(yè)的普遍應用,無人機傾斜攝影技術,憑借快速高效、機動靈活等優(yōu)勢,正慢慢顛覆傳統(tǒng)測繪的作業(yè)方式。
2020-09-28 11:14:491413 
立體圖形。而隨著無人機的普及以及無人機技術的創(chuàng)新和發(fā)展,無人機+傾斜攝影技術受到了越來越多人的關注,是目前市面上最熱門的城市三維建設的研究內容,通過在無人機上搭載微型傾斜相機,從垂直、傾斜等不同角度進行
2020-09-29 11:10:122466 傾斜攝影建模是目前新興的三維建模手段,大大加快了大場景下的精細三維模型的生產速度,真正意義上使得城市級別的三維模型應用于規(guī)劃設計成為可能。中科圖新專注于無人機傾斜攝影三維模型的應用、發(fā)布與展示,特別推出了傾斜攝影應用于規(guī)劃設計的解決方案。
2020-09-29 11:37:07920 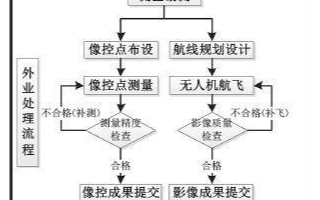
)3DGIS基于3D實景模型的綜合業(yè)務應用平臺使用的服務軟件,利用無人機傾斜攝影技術和建模,實現(xiàn)真實場景高度還原。讓奇妙的“活點地圖”成了真,甚至比它實現(xiàn)更多可能性。
2020-11-16 10:49:211903 得益于機械、材料、控制、通信、光學、軟件、算法等相關技術的進步,近年來,無人機系統(tǒng)的能力和關鍵技術成熟度得以不斷提升。且在技術推動和市場拉動的雙重作用下,無人機系統(tǒng)正逐步進入一種良性循環(huán)的迭代
2020-12-22 11:33:579662 總結分析各項能力和政策制度需求得出技術譜系,同無人機反制能力需求樹進行對比,得出無人機反制關鍵技術研究方向。
2021-04-12 11:11:141435 無人機反制系統(tǒng)關鍵應用在哪些行業(yè)? 無人機反制系統(tǒng)是一種新技術的反制系統(tǒng)。無人機反制的關鍵適用于機場、公安檢察院系統(tǒng)、牢房、拘留所、戒毒所、信息保密組織、軍隊、大中型比賽、巡回演唱、關鍵會議、反恐
2023-03-03 14:49:30714 不同的無人機反制系統(tǒng)依賴于各種探測或攔截無人機的技術。本篇,簡單介紹目前市場上的產品所采用的主要檢測和攔截方法,以及主要的平臺類型。根據(jù)2017《世界陸軍裝備技術發(fā)展報告》,反無人機作戰(zhàn)應當包括探測
2021-09-18 15:33:55508 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論