 電子發(fā)燒友App
電子發(fā)燒友App


無人機(UAV)是一種無人機駕駛的空中飛行器,通常由無線電遙控或自身程序控制。由于無需安裝飛行員相關的設備,無人機除了具備常用空中飛行器活動空域大、運動速度快的普遍特征以外,還具有尺寸小,重量輕、隱蔽性好、適應性強等特點。
在軍用領域,無人機能全天候、全空域執(zhí)行偵察、預警、通信、精確打擊、戰(zhàn)斗支援、救援、補給甚至自殺性攻擊等多種任務,在現(xiàn)代戰(zhàn)爭中的作用越來越顯著。在民用領域,無人機也可廣泛應用于航拍、警力、城市管理、農(nóng)業(yè)、地質(zhì)、氣象、電力、搶險救災等領域[1]。
但是,制約無人機在軍事和民用各個領域推廣應用面臨的飛行安全問題十分突出。隨著無人機的大量使用,中低空以及超低空的空域越來越“擁擠”,無人飛行器與其他物體發(fā)生碰撞的風險與日俱增,造成了極大的安全隱患[2]。
由于無人機上無飛行人員承擔障礙物檢測以及規(guī)避的職責,無人機系統(tǒng)只能依靠機載傳感器來完成障礙規(guī)避,這個過程就是“感知與規(guī)避”,承擔這一職能的系統(tǒng)被稱之為“感知與規(guī)避系統(tǒng)”。
感知與規(guī)避系統(tǒng)對無人機系統(tǒng)的自主飛行安全至關重要。世界各國都已認識到無人機自主感知與規(guī)避技術是推動無人機應用發(fā)展的關鍵因素[3]。2017年10月25日,美國啟動了無人機系統(tǒng)整合試點項目(The Unmanned Aircraft Systems Integration Pilot Program),旨在將無人機系統(tǒng)快速整合至國家空域,無人機感知與規(guī)避能力就是該項目的重點評估科目之一。
1.無人機自主感知與規(guī)避系統(tǒng)
“感知與規(guī)避”是指無人機能夠探測在其安全鄰域或空域監(jiān)視范圍內(nèi)是否存在障礙物(包括靜止地物或運動的其它飛行器),通過分析自身和障礙物的相對運動狀態(tài),由操作手或自動進行分析決策,從而解除潛在的碰撞危險[4]。
無人機自主感知與規(guī)避系統(tǒng)通常包含感知系統(tǒng)、決策系統(tǒng)、航路規(guī)劃系統(tǒng)三部分[5],工作過程一般是:首先通過感知系統(tǒng)來探測是否存在障礙物,當存在障礙物,則檢測出障礙物的距離、角度、速度等信息;然后由決策系統(tǒng)根據(jù)感知系統(tǒng)獲取的信息,判斷障礙物是否影響飛行安全,并決定是否需要對航路進行重新規(guī)劃;如果需要進行重新規(guī)劃,則由航路規(guī)劃系統(tǒng)通過綜合本機以及外部信息,調(diào)整航路以規(guī)避碰撞,整個流程如圖1所示。
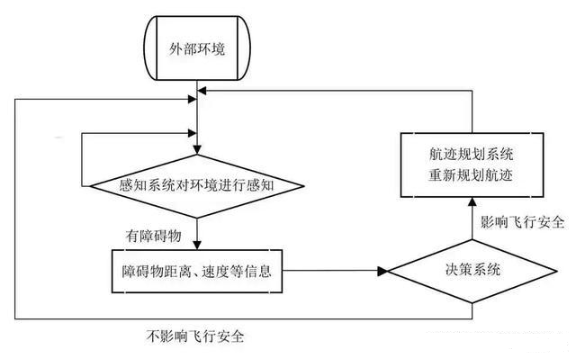
圖1 感知與規(guī)避系統(tǒng)工作流程圖2.感知系統(tǒng)
感知系統(tǒng)是無人機感知與規(guī)避系統(tǒng)中第一個環(huán)節(jié),需要檢測并獲取障礙物信息,為決策系統(tǒng)提供支撐。感知系統(tǒng)按工作方式的不同,可分為合作式和非合作式兩種。
2.1 合作式感知系統(tǒng)
合作式感知系統(tǒng)要求空中飛行器都攜帶協(xié)同式傳感器,以完成目標檢測,如飛機交通警戒和防撞系統(tǒng)(TCAS)、廣播式自動相關監(jiān)視系統(tǒng)(ADS-B)等。
(1)飛機交通警戒和防撞系統(tǒng)(TCAS)
TCAS是獨立運行的交通防撞和告警系統(tǒng),飛機上需裝備A/C詢問應答機和TCAS天線。TCAS會主動發(fā)出詢問信號,當其他飛機的應答機接收到詢問信號時,會發(fā)射應答信號;詢問方接收到應答信號后,TCAS處理機根據(jù)發(fā)射信號和應答信號的時間間隔來計算距離,同時根據(jù)天線指向確定方位,從而確定目標飛機的位置。但由于TCAS系統(tǒng)的探測范圍局限于加載有應答機的飛行器進行通信,且受TCAS天線尺寸限制,角度測量誤差較大,單獨的TCAS系統(tǒng)并不能完成無人機空域障礙感知的任務。
(2)廣播式自動相關監(jiān)視系統(tǒng)(ADS-B)
廣播式自動相關監(jiān)視系統(tǒng)(ADS-B)是一種裝載于飛行器上的監(jiān)視系統(tǒng),它將全球衛(wèi)星定位系統(tǒng)(GPS)、慣導系統(tǒng)(INS)等機載航電設備獲取飛機的四維位置信息(經(jīng)度、緯度、高度、時間),以及飛機自身的狀態(tài)信息(速度、方向等)等數(shù)據(jù),以廣播方式向外發(fā)送,提供給周圍的飛機或地面用戶接收和顯示。
ADS-B系統(tǒng)不僅能夠監(jiān)視空域中裝載有ADS-B設備的飛行器,而且通過與空中交通管制系統(tǒng)(ATC)的交聯(lián),能夠獲取飛行空域的天氣、地形、空域限制等飛行信息[6]。因此,根據(jù)ADS-B系統(tǒng)提供的飛行規(guī)程、ATC信息、空域內(nèi)其他飛行器詳細信息,能夠?qū)崿F(xiàn)無人機的路徑規(guī)劃、空域目標感知、威脅評估、沖突規(guī)避等。另外,ADS-B系統(tǒng)可以將無人機納入ATC的監(jiān)管和管理,有利于飛行空域安全。國際民航組織(ICAO)已將其確定為未來空域監(jiān)管技術發(fā)展的主要方向,國際航空界正在積極推進該項技術的應用。
2.2 非合作式感知系統(tǒng)
當載機與障礙物之間無法進行信息交互時,需要通過非合作式感知系統(tǒng)進行自主檢測,非合作式感知系統(tǒng)通常采用雷達、激光和光電等傳感器。
(1)雷達
雷達系統(tǒng)是一種主動探測設備,利用電磁波的反射來檢測障礙物,該電磁回波中包含有障礙物目標方向大小、相對距離等信息,并具有探測范圍廣、全天候、全天時工作的特點,然而雷達系統(tǒng)通常體積、功耗較大,無法適用于中小型無人機系統(tǒng),且目標精確識別能力有限。
(2)激光
激光傳感器具有精度高、單向性好等優(yōu)點,機載激光感知系統(tǒng)通過向目標發(fā)射激光光束,將接收到的反射光束與發(fā)射光束對比分析得到目標的距離,進一步處理后,可得到目標的方位、速度、形狀等參數(shù)。激光傳感器不易受氣流影響,但易受到煙霧、灰塵和雨滴的干擾。目前,激光傳感器在軍用和民用感知與避障系統(tǒng)中都有一定的應用。
激光雷達結構簡單,速度快重量輕。文獻7中作者對日本Hokuyo公司的URG-04LX雷達進行了分析:URG-04LX工作波段為785nm,掃描半徑為4m的240°扇形區(qū)域,角分辨率0.36°,距離測量精度10mm并采用一種基于角度對應關系的估計算法(Polar Scan Matching,PSM),可以得到四旋翼無人機在復雜情況下的相對位置與姿態(tài)信息。該算法的收斂速度快,迭代時間短。此外,經(jīng)典算法還包括迭代最近點算法(Iterative Closest Point,ICP)、基于迭代的最小方差算法(Iterative Dual Correspondence,IDC)等。其中PSM算法在部分的三維空間內(nèi)計算速度優(yōu)于ICP算法。
以上算法都是基于即時定位與地圖構建(Simultaneous Localization and Mapping,SLAM)思想的路徑規(guī)劃方法,而在應用于隨機出現(xiàn)的運動物體情況下,也可以直接基于成像點云進行伺服動作以規(guī)避,而不必迭代計算無人機相對位置。
(3)光電
光電傳感器采用光電元件將目標場景的光信號轉化為電信號,具有被動無源的特點,且所獲取的圖像中含有豐富的細節(jié)消息,對操作手而言是最直觀的一種傳感器系統(tǒng),也是當前軍用大型無人機非合作目標感知與規(guī)避系統(tǒng)必不可少的傳感器[8]。高分辨率可見光CCD相機作用距離遠、分辨率高、隱蔽性好,是無人機感知障礙物的首選,但其無法全天候、全天時工作,因此目前主流的機載光電系統(tǒng)通常包含一個高分辨率的可見光 CCD傳感器和一個較低分辨率的紅外熱像儀。紅外熱像儀能根據(jù)各類目標和背景輻射特性的差異,完成對障礙物的全天候探測和識別。
由于單個光電傳感器所獲取的圖像丟失了深度信息,無法直接獲取目標的距離信息,因此需要采用多個傳感器采用立體視覺的方法實現(xiàn)障礙物精確信息的獲取,或與激光、雷達傳感器配合使用[9]。
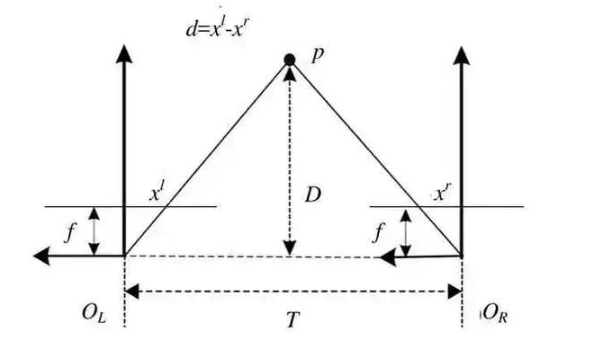
圖2 雙目視覺算法原理圖2所示的是雙目視覺算法的基本原理,其中P代表目標,OL和OR分別代表鏡頭光心,f代表鏡頭焦距,D代表目標到兩個鏡頭連線的垂直位置,T代表基線距離,d表示左右兩個鏡頭的視差值,d = x l - x r 。通過公式 D = T * f/d可以算出目標距離。
雙目視覺的最大優(yōu)點在于三維匹配技術[10],它能夠用來感受空間中場景的深度和距離信息。因此,有關雙目視覺的算法層出不窮。在文獻 11中作者對一些最優(yōu)估計的理論方法進行了討論。匹配算法一般可以分為局部立體匹配算法和全局立體匹配算法。局部立體匹配算法是基于窗口的算法,選擇圖像的局部特征作為最優(yōu)估計的依據(jù);全局立體匹配算法的最優(yōu)化依據(jù)不局限于窗口之內(nèi)。其中基于動態(tài)規(guī)劃的立體匹配(Dynamic Programming)、棘突圖割法的立體匹配(Graph Cuts)比較有代表性。
但是,這些算法所能實現(xiàn)的高精度定位和導航,嚴重依賴圖像攝像機的精度、立體匹配算法的高準確性和實時性、測距和目標識別的精度等,目前還存在不小的挑戰(zhàn)。
大疆科技的精靈4無人機采用了立體視覺的方式實現(xiàn)感知與規(guī)避,無人機裝有兩套雙目立體視覺系統(tǒng),一套向前看,一套向下看,一共 4個相機,向下看的一套雙目立體視覺系統(tǒng)可以探測下方地面上物體的三維位置,并計算無人機的準確飛行高度;向前看的一套雙目立體視覺系統(tǒng)可以用來探測前方場景中物體的深度,產(chǎn)生深度圖進行障礙感知。
2.3 多源信息融合的感知系統(tǒng)
有效的無人機感知系統(tǒng)通常包含多種傳感器,多源信息融合可以對來自于多個傳感器的數(shù)據(jù)進行多層次、多級別和全方位的綜合處理,得到對環(huán)境的最佳描述。無人機上的各種感知系統(tǒng)都可獲取障礙物的部分信息,通過多源信息融合,將各種實時或者非實時、速變或漸變、模糊或準確、相似或矛盾等不同特征的傳感器信息、測量數(shù)據(jù)、統(tǒng)計數(shù)據(jù)、經(jīng)驗數(shù)據(jù)進行融合處理,通過聚類方法或卡爾曼濾波對空間或時間上的冗余或互補信息進行處理,以獲得空中潛在威脅目標的一致性的解釋或描述。
多源信息融合的感知系統(tǒng)綜合了無人機機載導航信息、雷達/光電數(shù)據(jù)、TCAS、ADS-B信息,有效地利用了多傳感器資源信息的互補性,從而可以獲得空中潛在威脅目標更為全面的信息,確保實現(xiàn)更安全更可靠的規(guī)避。
3. 決策系統(tǒng)
決策系統(tǒng)主要負責根據(jù)感知系統(tǒng)提供的信息,判定障礙物對自身的威脅程度,常用的判定依據(jù)包括:
(1)相對高度差;
(2)相對距離;
(3)相對距離變化率,即相對速度;
(4)預留時間,即相對距離與相對速度之商。
預留時間至關重要,按空中交通管理系統(tǒng)規(guī)定,可將障礙物威脅等級劃分為4級[4]。
(1)其他交通目標級別:相對距離大于 6海里或相對高度差大于1200英尺,無碰撞危險;
(2)接近交通目標級別:相對距離小于 6海里或相對高度差小于1200英尺,無碰撞危險;
(3)交通警戒級別:預留時間為35~45s,存在潛在碰撞危險,需提前做出規(guī)避決策;
(4)規(guī)避決策級別:預留時間為20~30s,存在潛在碰撞危險,必須做出規(guī)避決策。
4. 航路規(guī)劃系統(tǒng)
基于障礙規(guī)避目的的航路規(guī)劃是指無人機根據(jù)感知信息得到的威脅目標的運動狀態(tài),以及碰撞規(guī)避點、碰撞預留時間等,同時考慮燃油、無人機機動特性確定一條最優(yōu)路徑的過程。其本質(zhì)是一類多約束優(yōu)化問題,算法種類繁多,人工勢場法是應用較為廣泛的一種算法。
人工勢場法是一種虛擬力場法。它通過引入物理學中場的概念,在任務空間中構造勢場。在勢場中無人機受到目標位置的引力作用向目標點移動,障礙物對無人機的作用是斥力場作用,使其不碰撞障礙物。沿著勢場函數(shù)下降的方向搜索無碰撞、安全路徑。作用在無人機上的力為引力與斥力的合力,根據(jù)合力的作用確定無人機的運動方向,同時計算出無人機的位置。人工勢場算法計算簡單快速,適用于動態(tài)和靜態(tài)障礙環(huán)境[12]。
與其他三維航路規(guī)劃算法相比,其具有顯著的優(yōu)點:首先,人工勢場法在規(guī)劃航路時只需根據(jù)勢力場計算當前位置受到的合力,結合當前無人機運動狀態(tài)進行避障規(guī)劃,所以其最顯著的特點是計算量小、運算速度快。其次,利用人工勢場法可以得到平滑而安全的航路,而其他航路規(guī)劃算法不僅需要對航路進行平滑操作,可能還需要重新進行最小直飛距離、最大爬升角度等飛行安全性能檢測。
5. 總結與展望
無人機自主感知與規(guī)避技術涉及傳感器設計、信號與信息處理、環(huán)境感知、目標檢測/識別與跟蹤、障礙物威脅評估、航路規(guī)劃等諸多領域,同時也涉及空域管理、飛行安全規(guī)劃等政策法規(guī),是一個復雜的系統(tǒng)工程。隨著無人機在軍民領域的廣泛應用,自主感知與規(guī)避能力會成為無人機必不可少的功能。
當前合作式感知系統(tǒng)和非合作式感知系統(tǒng)都得到了很大的發(fā)展,TCAS可以獲得更多、更準確的信息,雷達和光電都可探測得更遠、更準,多源數(shù)據(jù)的實時融合將是下一階段的主要發(fā)展方向。
航路規(guī)劃系統(tǒng)主要依據(jù)感知系統(tǒng)的信息進行推導,因此如何充分發(fā)揮感知系統(tǒng)各種傳感器的特性是接下來要解決的問題。
從無人機感知與規(guī)避系統(tǒng)的整體結構來看,外部信息首先由傳感器獲得并進行處理,然后處理后的信息將被傳輸?shù)經(jīng)Q策系統(tǒng)進行判斷,最后決策系統(tǒng)發(fā)出的指令將傳輸?shù)胶铰芬?guī)劃系統(tǒng)。在整個過程中,任何一個環(huán)節(jié)上信息傳輸?shù)难舆t都有可能降低感知與規(guī)避系統(tǒng)的總體表現(xiàn)。因此,如何提升感知與規(guī)避系統(tǒng)對于信息傳輸延遲的魯棒性也是非常重要的一點。
從整個系統(tǒng)功能上來看,無人機自主感知與規(guī)避系統(tǒng)應主要朝著以下方向發(fā)展,以提高系統(tǒng)的智能化程度。
(1)可規(guī)避的障礙類別更廣;
(2)可適應各種使用環(huán)境;
(3)縮短系統(tǒng)判定周期,避免無人機突然的機動。
參考文獻:
[1]朱立華。無人機自主檢測與避障技術研究[D]。東南大學,2016.
[2]閆曉東。基于視覺的四軸飛行器自主避障系統(tǒng)的研究與實現(xiàn)[D]。電子科技大學,2018.
[3]惠國騰。基于性能的旋翼無人機避障關鍵技術研究與應用[D]。中國民用航空飛行學院,2018.
[4]李耀軍,潘泉等。基于多源信息融合的無人機感知與規(guī)避研究[A]。第二十九屆中國控制會議論文集[C]。北京,2010.
[5]畢紅哲,張洲宇等。無人機感知與規(guī)避技術研究進展[J]。電子測量與儀器學報,2016,30(5):661-668.
[6]朱海峰。基于立體視覺的無人機感知與規(guī)避研究[D]。西安:西北工業(yè)大學,2016.
[7]郭芳。復雜環(huán)境下四旋翼無人機定位研究[D]。天津大學,2012.天津
[8]韓靜雅,王宏倫等。基于視覺的無人機感知與規(guī)避系統(tǒng)設計[J]。戰(zhàn)術導彈技術,2014,5:11-19.
[9]何守印。基于多傳感器融合的無人機自主感知與避障研究[D]。北京理工大學,2016.
[10]王淏。基于雙目視覺的無人機障礙物檢測研究[D]。蘭州理工大學,2018.
[11]蘇東。基于雙目視覺的小型無人飛行器的導航與避障[D]。電子科技大學,2014.
[12]李竺袁。民用無人機自主飛行避讓算法研究[D]。中國民用航空飛行學院,2018.










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論