2015年,隨著無人機(jī)爆發(fā)式的增長,國內(nèi)外無人機(jī)企業(yè)紛紛展開了全方位的角逐,各種層出不窮的新技術(shù)也相繼登場。市場上的競爭說白了還是技術(shù)上的積累與比拼,那么,問題來了,今年無人機(jī)企業(yè)在技術(shù)發(fā)展上做出了哪些創(chuàng)新與實(shí)踐呢?哪些技術(shù)能在無人機(jī)技術(shù)瑯琊榜上留下一筆呢?
2020-05-11 08:25:02
正在影響和改變這個(gè)社會(huì)。無人機(jī)集多種傳感器與一身,無人機(jī)技術(shù)與當(dāng)前最火的人工智能、物聯(lián)網(wǎng)技術(shù)是相同的,更符合當(dāng)前技術(shù)潮流和趨勢。它一個(gè)數(shù)模混合軟硬結(jié)合,且具有系統(tǒng)性的工程項(xiàng)目,能培養(yǎng)初學(xué)者系統(tǒng)架構(gòu)的能力
2017-11-15 11:57:36
,一個(gè)一個(gè)的法律文件下發(fā),加強(qiáng)無人機(jī)的管控和實(shí)名登記。這里我們不對政治進(jìn)行任何評論,只就無人機(jī)防御、無人機(jī)反制技術(shù)手段進(jìn)行分析;無人機(jī)管控手段有以下幾種:1、用槍打。此種方法看似比較過癮,不僅管住了還
2022-08-23 12:03:32
,拘留所等地方,都能起到很好的保護(hù)作用。目前世界上的反無人機(jī)技術(shù)有三大類型。一、電磁干擾:通過信號(hào)干擾、聲波干擾等手段進(jìn)行干擾。二、直接摧毀,激光武器、無人機(jī)打擊無人機(jī)。三、監(jiān)控控制,主要由控制和截獲
2022-09-13 11:03:53
無人機(jī)在快遞服務(wù)、倉儲(chǔ)服務(wù)領(lǐng)域不斷有新的進(jìn)展,除科技公司、物流企業(yè)之外,亦不乏零售商家的身影。美國聯(lián)邦航空管理局8月底推出了商用無人機(jī)新規(guī)定,當(dāng)下無人機(jī)監(jiān)管環(huán)境已開始轉(zhuǎn)向,但大范圍實(shí)現(xiàn)無人機(jī)商用仍有諸多障礙需要克服。
2020-05-13 06:35:22
路無人機(jī)巡檢作業(yè)技術(shù)導(dǎo)則》的電力行業(yè)標(biāo)準(zhǔn)草案,公開征求意見。我們預(yù)計(jì)電力聯(lián)合會(huì)的無人機(jī)行業(yè)標(biāo)準(zhǔn)在今年有望正式出臺(tái)。 圖:人工、載人直升機(jī)、無人機(jī)三種方式進(jìn)行店里巡查對比。我國110kV以上高壓輸電線
2018-10-12 10:12:57
` 無人機(jī)是如何上升的?`
2019-08-28 16:27:19
` 無人機(jī)應(yīng)用技術(shù)專業(yè)前景怎么樣?`
2019-08-28 16:38:40
` 誰來闡述一下無人機(jī)應(yīng)用技術(shù)專業(yè)如何?`
2019-08-28 16:31:41
` 誰來闡述一下無人機(jī)應(yīng)用技術(shù)專業(yè)屬于什么大類?`
2019-08-28 16:48:27
` 誰知道無人機(jī)應(yīng)用技術(shù)專業(yè)是找什么工作的?`
2019-08-28 16:42:18
杜克大學(xué)教授和該所大學(xué)人類和自治實(shí)驗(yàn)室主任米西·卡明斯經(jīng)常想象無人機(jī)快遞到來的那一刻,她喜歡想象自己八歲的兒子看到無人機(jī)落在自己家后院時(shí)的反應(yīng)。卡明斯說:“如果無人機(jī)出現(xiàn)的話,他一定會(huì)向無人機(jī)扔石頭,這是人的本性。”
2020-05-06 08:27:33
誰知道無人機(jī)怎么懸停的嗎?
2019-08-27 15:50:10
` 雷達(dá)系統(tǒng)很難識(shí)別出小型無人機(jī)和緊貼地面飛行的無人機(jī)。“事實(shí)證明,使用現(xiàn)有技術(shù)很難識(shí)別和減輕無人機(jī)威脅。” 那么針對無人機(jī)的探測存在哪些難點(diǎn)呢?電磁干擾會(huì)降低射頻傳感器探測能力。在城市環(huán)境中,有
2020-07-29 07:36:49
。當(dāng)然某些特殊用途的無人機(jī)可以采用諸如地形匹配、圖像識(shí)別以及高精度慣性導(dǎo)航的辦法來確定自己的位置,并且自主的完成任務(wù),但在民用領(lǐng)域尚未普及。既然無人機(jī)必須使用無線電技術(shù),就可以對無線電進(jìn)行干擾,從而
2019-07-11 07:50:38
在過去十年中,很少有新興技術(shù)像無人駕駛飛行器(UAV)或者更簡單的無人機(jī)那樣強(qiáng)烈地吸引了公眾的想象力。這些技術(shù)的開發(fā)和使用以前主要限于軍事目的,但從21世紀(jì)后期開始,智能手機(jī)的巨大商業(yè)成功和廣泛普及
2019-02-21 18:18:23
如今,我們經(jīng)常在很多公園或空曠場所看到有人玩那種小型無人機(jī),每次看它們拿著手里的遙控器,讓無人機(jī)自由翱翔于空中,這種感覺很“酷炫”,可是您知道無人機(jī)的工作原理嗎?
2021-01-13 06:34:07
實(shí)在太陌生。目前除消費(fèi)級無人機(jī)外,相當(dāng)一部分的無人機(jī)廠商正是生產(chǎn)這些有針對性的行業(yè)無人機(jī)。但因?yàn)?b class="flag-6" style="color: red">無人機(jī)行業(yè)仍處于發(fā)展初期,可改進(jìn)的空間還有很多,所以更應(yīng)開發(fā)多特殊用途的無人機(jī),并且快速提升行業(yè)需求的指標(biāo),這才是眾多無人機(jī)廠商發(fā)展的目標(biāo)。
2020-08-20 07:59:22
控,來實(shí)現(xiàn)噴灑作業(yè),可以噴灑藥劑、種子、粉劑等。目前國內(nèi)植保無人機(jī)技術(shù)和產(chǎn)品性能參差不齊,眾多產(chǎn)品中絕少有能夠滿足大面積高強(qiáng)度植保噴灑要求的。 二、植保無人機(jī)有哪些特點(diǎn)? 植保無人機(jī)具有作業(yè)高度低
2019-06-28 10:06:03
上周,第十七屆高交會(huì)無人系統(tǒng)展分會(huì)場——中國(深圳)國際無人系統(tǒng)技術(shù)成果交易展覽會(huì)在深圳完美落幕。素有高新技術(shù)領(lǐng)域的“行業(yè)風(fēng)向標(biāo)”、“技術(shù)風(fēng)向標(biāo)”和“創(chuàng)新風(fēng)向標(biāo)”之稱的高交會(huì),點(diǎn)燃了無人機(jī)世界
2020-08-20 06:58:58
` 誰知道無人機(jī)表演是通過什么進(jìn)行控制的?`
2019-08-27 15:25:28
1、無人機(jī)遙感簡介無人機(jī)遙感(UnmannedAerialVehicleRemoteSensing),既是利用先進(jìn)的無人駕駛飛行器技術(shù)、遙感傳感器技術(shù)、遙測遙控技術(shù)、通訊技術(shù)、GPS差分定位技術(shù)
2018-11-01 11:22:47
無人機(jī)遙感(Unmanned Aerial Vehicle Remote Sensing ), 即利用先進(jìn)的無人駕駛飛行器技術(shù)、遙感傳感器技術(shù)、遙測遙控技術(shù)、通訊技術(shù)、GPS差分定位技術(shù)和遙感應(yīng)用技術(shù)
2016-03-11 07:59:06
`圖片來自新浪軍事現(xiàn)在無人機(jī)越來越多,現(xiàn)在經(jīng)常可以看到有一架無人機(jī)在窗口晃來晃去,如何對這種無人機(jī)進(jìn)行處理?打下來的話可能會(huì)砸到人,可以誘捕嗎?`
2015-06-05 11:54:05
眼下,全球正處在新一輪科技革命與產(chǎn)業(yè)變革的前夜,以互聯(lián)網(wǎng)技術(shù)、AI技術(shù)、無人技術(shù)等的突破為代表,集中推動(dòng)著人們生產(chǎn)與生活的快速發(fā)展。這其中,作為無人技術(shù)的重要組成之一,無人機(jī)展現(xiàn)出了顯著作用價(jià)值
2021-07-12 07:22:36
本人非常喜歡無人機(jī),現(xiàn)做了一架空機(jī),目前用的是一般航模的飛控,但這已經(jīng)不能滿足我的需求,看了單片機(jī)之后突發(fā)奇想,能不能用單片機(jī)做個(gè)飛控(機(jī)載端和PC端),實(shí)現(xiàn)超視距飛行和可編程自主飛行,用計(jì)
2012-10-26 13:43:47
摘要:無人機(jī)(UAV)是無人駕駛飛機(jī)的簡稱,是指利用無線電遙控設(shè)備和自備的程序控制裝置操縱的不載人飛行器。無人機(jī)最初誕生在一戰(zhàn)時(shí)期,作為靶機(jī)使用。而經(jīng)過幾十年的發(fā)展,由于通信技術(shù)的飛速發(fā)展,無人機(jī)
2021-07-21 08:03:24
裝備主要采用相位干涉儀測向、旋轉(zhuǎn)天線測向和時(shí)差測向等,它們都是采用多點(diǎn)交叉定位技術(shù)進(jìn)行定位。該方法定位速度慢,精度低,與國外先進(jìn)的高精度快速無源定位裝備相比差距較大。在國內(nèi)相位差變化率快速定位技術(shù)仍處于理論研究階段和試驗(yàn)中,工程中全文下載
2010-05-06 09:04:50
你好,我想用FPGA解決以下問題。信號(hào)通過兩條單獨(dú)的線傳播,因此它們具有相位差。獲得這種相位差異的直接方法是:1:保存兩個(gè)信號(hào)2:用Hilbert變換使兩個(gè)信號(hào)復(fù)雜化3:乘法:e ^ j
2019-03-26 10:34:21
這個(gè)是labview相位差檢測的一些網(wǎng)絡(luò)資料,挺有用,分享給大家
2015-06-22 07:45:05
本帖最后由 eehome 于 2013-1-5 09:54 編輯
相位差測量與虛擬相位差計(jì)---相關(guān)資料
2012-05-08 17:30:02
想用adf4351做一個(gè)鎖相環(huán)提取載波,但是每次鎖定后輸出都和參考有一個(gè)隨機(jī)的相位差,請問如何才能消除這個(gè)相位差,使輸出與參考輸入同頻同相。寄存器配置如下:
2018-08-09 06:48:18
申請理由:以前參加電子設(shè)計(jì)大賽的時(shí)候,鼓搗過一段時(shí)間無人機(jī),一直對無人機(jī)非常感興趣。ELF-VRDrone靈翼航拍無人機(jī)通過手機(jī)遙控,體積較小,可以實(shí)現(xiàn)自主定高,實(shí)現(xiàn)航拍功能,非常吸引人。項(xiàng)目描述
2016-04-19 18:02:09
值保持固定值的結(jié)果。圖4利用參數(shù)Track功能(波形F1)進(jìn)行動(dòng)態(tài)相位差測量,以顯示作為時(shí)間函數(shù)的相位差周期變化相位參數(shù)讀出的最小值和最大值提供整個(gè)調(diào)制周期內(nèi)的相位偏移的范圍。其他相位測量技術(shù)相位參數(shù)在
2020-02-11 12:11:18
自主巡航。右搖桿的下方是“急停”自鎖按鍵,實(shí)現(xiàn)無人機(jī)急停降落。如下圖所示為無人機(jī)遙控手柄整體示意圖。圖6各個(gè)單元功能如下表所示:手柄功能圖7圖8OLED 菜單顯示及其功能操作如下表所示。OLED 菜單
2022-08-19 18:16:13
://www.1cnz.cn/soft/study/ms/2017/20170131479263.html5.基于無人機(jī)遙感技術(shù)的環(huán)境監(jiān)測研究進(jìn)展http://www.1cnz.cn
2017-02-15 21:06:18
采用模擬圖傳?》的文章在微信里經(jīng)多個(gè)公號(hào)轉(zhuǎn)載,無人機(jī)圖傳系統(tǒng)是什么?對于大多數(shù)無人機(jī)愛好者來說是一知半解的。
2019-08-09 08:20:07
>八臂四饋零相位技術(shù)、高精度 >設(shè)計(jì)巧妙、結(jié)構(gòu)輕小(19克)>批量用于無人機(jī)、車載、手持裝備 2、差分GPS模塊(可自帶電臺(tái)數(shù)據(jù)鏈路) >支持GPS/北斗雙星
2016-05-26 15:54:54
/導(dǎo)航系統(tǒng)干擾是當(dāng)下反無人機(jī)技術(shù)的主流方式之一。通過實(shí)施干擾,使無人機(jī)的通信/導(dǎo)航設(shè)備受到影響或失靈。考慮到當(dāng)前各國出現(xiàn)的小型偵察無人機(jī)大多通過地面控制站、采用無線電實(shí)時(shí)遙控的方式獲取戰(zhàn)場信息,我們通過
2022-09-08 10:10:18
特殊用途的無人機(jī)可以采用諸如地形匹配、圖像識(shí)別以及高精度慣性導(dǎo)航的辦法來確定自己的位置,并且自主地完成任務(wù),但在民用領(lǐng)域尚未普及。既然無人機(jī)必須使用無線電技術(shù),就可以對無線電進(jìn)行干擾,從而達(dá)到使無人機(jī)
2022-08-25 11:57:01
由交通部和美國聯(lián)邦航空管理局成立的特別小組錦衣新的和現(xiàn)存的無人機(jī)到聯(lián)邦***注冊。該任務(wù)小組包括無人機(jī)行業(yè)和航空安全社區(qū)的成員,提出重量超過250克的無人機(jī)必須注冊。
2020-05-12 06:23:14
基于A40i平臺(tái)在RTK接收主機(jī)上的應(yīng)用 2020年9月8日一. 了解RTK1、什么是RTK?RTK(Real - time kinematic,實(shí)時(shí)動(dòng)態(tài))載波相位差分技術(shù),是實(shí)時(shí)處理兩個(gè)測量站載波
2021-02-21 10:10:25
的時(shí)候經(jīng)過的路線長度相同,功分器的輸出同樣處理,以保證相位差值不變。AD8302部分版圖的如圖5所示。腔體使用SolidWorks設(shè)計(jì)軟件進(jìn)行設(shè)計(jì),同樣分兩個(gè)腔體設(shè)計(jì)。最終的設(shè)計(jì)實(shí)物圖如圖6所示。采用
2018-10-22 09:53:57
``最近看到一款無人機(jī)能實(shí)現(xiàn)整機(jī)防水,是全球首家能量產(chǎn)發(fā)型的防水無人機(jī), 就連當(dāng)初火爆一時(shí)的Lily主打防水,最終計(jì)劃流產(chǎn)。看來無人機(jī)做防水,確實(shí)是有點(diǎn)技術(shù)難點(diǎn)!推薦課程:張飛四旋翼飛行器視頻套件
2018-01-06 15:25:15
通過對平均值相位差計(jì)原理的分析和程序設(shè)計(jì)、仿真,用FPGA芯片實(shí)現(xiàn)了一個(gè)高精度、寬頻率范圍的相位差計(jì)。該測量方法的最大優(yōu)點(diǎn)是系統(tǒng)電路簡單,不需要鎖相環(huán),占用的邏輯資源少,選用低端FPGA芯片完全能滿足要求,大大提高了被測信號(hào)的頻率范圍及測量精度,具有一定的應(yīng)用價(jià)值。
2021-05-10 06:04:50
如何使用相關(guān)技術(shù)測量相位差?
2021-05-07 06:34:19
如何設(shè)計(jì)出一個(gè)利用PPM控制無人機(jī)動(dòng)作的四軸無人機(jī)?
2021-09-23 06:47:19
去北方藍(lán)天無人機(jī)培訓(xùn)學(xué)校啊4大優(yōu)勢:1、包學(xué)包會(huì)、學(xué)會(huì)為止2、免費(fèi)復(fù)訓(xùn)3、尊享優(yōu)惠,創(chuàng)業(yè)支持4、百分之百取證就業(yè),多旋翼就業(yè),直升機(jī)就業(yè),固定翼就業(yè)。可從事工作:無人機(jī)航拍,無人機(jī)電力巡線,無人機(jī)
2016-12-15 09:46:19
FPGA輸出兩路具有相位差的高頻方波信號(hào),怎樣實(shí)現(xiàn)?用延時(shí)可以嗎?怎么實(shí)現(xiàn)呢?我是這樣做的,可是看不到效果呀!!!reg[1:0] state;reg[30:0] cnt;always
2013-08-12 00:42:19
求無人機(jī)入門技術(shù)推薦課程:張飛四旋翼飛行器視頻套件,76小時(shí)吃透四軸算法http://t.elecfans.com/topic/40.html?elecfans_trackid=bbs_post
2017-03-12 13:17:04
正弦波進(jìn)行相位調(diào)制(PM)。跡線C2(從頂部開始的第二個(gè))是10 MHz正弦,沒有調(diào)制。相位參數(shù)讀取兩個(gè)波形之間的相位差。源波形的每個(gè)周期的測量的相位差繪制在從頂部(F1)的第三跡線中作為相位參數(shù)
2018-09-14 21:00:42
了解無人機(jī)反制技術(shù)與應(yīng)用,為您揭開這一神秘領(lǐng)域的面紗。
一、無人機(jī)技術(shù)概述
1 無人機(jī)的定義與分類
無人機(jī),即無人駕駛飛行器,是一種通過無線電遙控或自主飛行控制系統(tǒng)操縱的飛行器。根據(jù)其用途和性能,無人機(jī)
2024-03-12 10:42:46
,農(nóng)業(yè)生產(chǎn)者通過無人機(jī)進(jìn)行精確噴灑,提高作業(yè)效率。此外,無人機(jī)還廣泛應(yīng)用于環(huán)境監(jiān)測、動(dòng)物保護(hù)、新聞報(bào)道等多個(gè)領(lǐng)域,為我們的生活帶來便利和新的視角。
在商用領(lǐng)域,無人機(jī)同樣大放異彩。快遞公司通過無人機(jī)實(shí)現(xiàn)快速
2024-03-12 11:13:32
隨著科技的飛速發(fā)展,無人機(jī)技術(shù)日益成為當(dāng)今社會(huì)的熱門話題。從最初的軍事偵察到如今的民用消費(fèi),無人機(jī)憑借其靈活性和高效性,在航拍、農(nóng)業(yè)、物流等多個(gè)領(lǐng)域大放異彩。然而,無人機(jī)技術(shù)的廣泛應(yīng)用也帶來
2024-03-12 10:56:16
GPS等導(dǎo)航設(shè)備獲取位置信息,實(shí)現(xiàn)精確定位。在復(fù)雜環(huán)境下,無人機(jī)還可以利用視覺識(shí)別、激光雷達(dá)等技術(shù)進(jìn)行導(dǎo)航。
無線通信:無人機(jī)與地面控制站通過無線通信進(jìn)行數(shù)據(jù)交換。地面控制站可以發(fā)送控制指令給無人機(jī)
2024-03-12 11:28:20
中科聯(lián)航科技股份有限公司是以民用無人機(jī)駕駛員培訓(xùn)認(rèn)證及民用無人機(jī)領(lǐng)域?qū)I(yè)應(yīng)用為主的培訓(xùn)機(jī)構(gòu)。為滿足無人機(jī)駕駛技術(shù)在民用領(lǐng)域中的快速發(fā)展和專業(yè)人才的匱乏;結(jié)合國際航空器擁有者及駕駛員協(xié)會(huì)中國分支協(xié)會(huì)
2017-06-07 15:39:09
無人機(jī)測控系統(tǒng)的現(xiàn)有技術(shù)和新技術(shù),對艦載無人機(jī)測控系統(tǒng)的關(guān)鍵技術(shù)進(jìn)行綜述,主要包括艦載無人機(jī)數(shù)據(jù)鏈通信技術(shù)、艦面測控站技術(shù)和天線設(shè)計(jì)技術(shù)。
2019-07-18 06:54:16
無人機(jī)越來越受歡迎,用于拍攝震撼的的片段、運(yùn)送救援物資,甚至用于競賽。大多數(shù)無人機(jī)使用各種傳感技術(shù)實(shí)現(xiàn)自主導(dǎo)航、碰撞檢測和許多其他功能。超聲波傳感尤其有助于無人機(jī)著陸、懸停和地面跟蹤。無人機(jī)降落輔助
2022-11-11 08:12:22
無人機(jī)技術(shù)和設(shè)備對那些想進(jìn)行環(huán)境勘測的人們來說很有實(shí)用價(jià)值。10.管道和電線巡檢配備激光雷達(dá)或熱成像傳感器的直升機(jī)常用于檢測大型公用事業(yè)建筑,例如管道和電線。配備類似傳感器的無人機(jī)也可以執(zhí)行這樣的巡檢任務(wù)。無人機(jī)在這個(gè)領(lǐng)域的應(yīng)用日益流行,因?yàn)?b class="flag-6" style="color: red">無人機(jī)比直升機(jī)更安全便宜。``
2017-02-17 15:28:42
高精度相位差計(jì)的設(shè)計(jì)本文介紹的高精度相位差計(jì)由單片機(jī)控制模塊、放大整形模塊部分、數(shù)碼顯示模塊、分頻模塊、簡單的數(shù)字邏輯控制門等組成。采用了鎖相倍頻技術(shù),實(shí)現(xiàn)了相位差測量高精度性達(dá)0.1度。 [hide][/hide]
2009-12-14 17:04:55
樣/取樣說明。服務(wù)范圍產(chǎn)品/行業(yè)服務(wù)范圍:無人機(jī)整機(jī)系統(tǒng)、無人機(jī)機(jī)巢、無人機(jī)搭載的相關(guān)傳感器等。無人機(jī)、飛行器研發(fā)生產(chǎn)廠家。檢測標(biāo)準(zhǔn)可以做的標(biāo)準(zhǔn)均列出(包含上方套
2023-09-21 17:17:23
本文介紹的高精度相位差計(jì)由單片機(jī)控制模塊、放大整形模塊部分、數(shù)
2010-07-22 16:46:06 53
53 什么是正弦交流電的相位,初相角和相位差?
2008-10-04 15:46:53 17002
17002 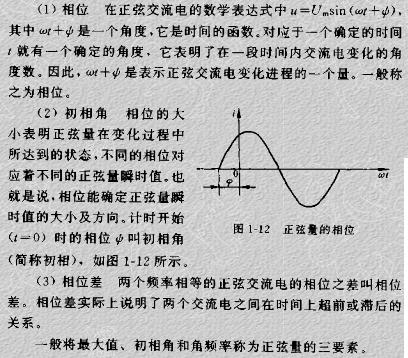
90度相位差基準(zhǔn)電路
2009-02-09 12:44:182239 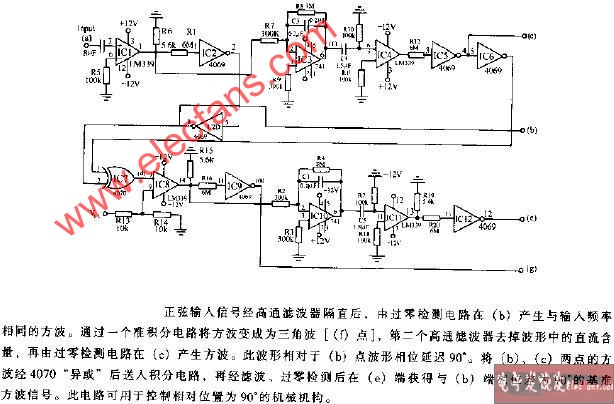
90度相位差基準(zhǔn)電路
2009-02-09 12:44:191291 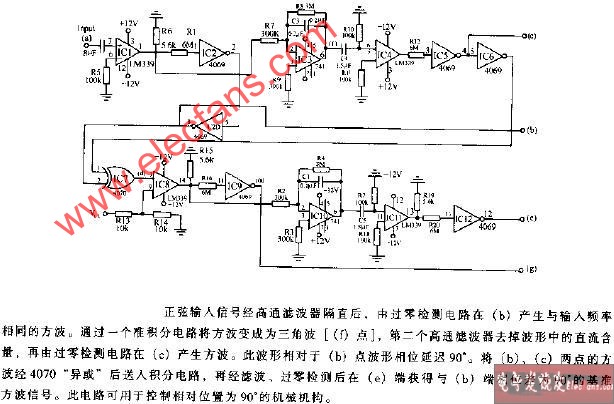
相位差測量電路
2009-02-10 09:09:467682 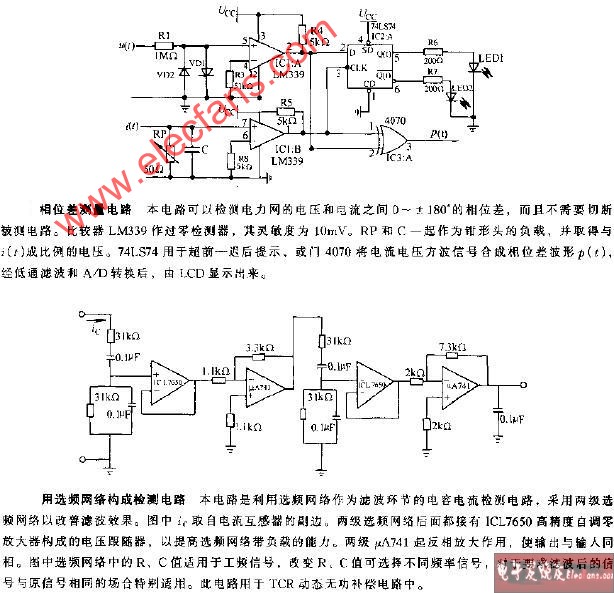
信號(hào)相位差輸出電路
2009-04-21 21:14:131080 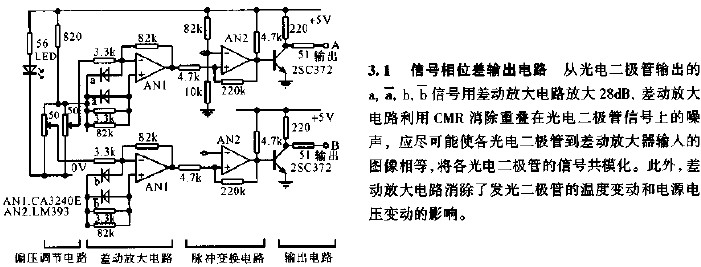
2信號(hào)相位差輸出電路圖
2009-07-09 11:52:17843 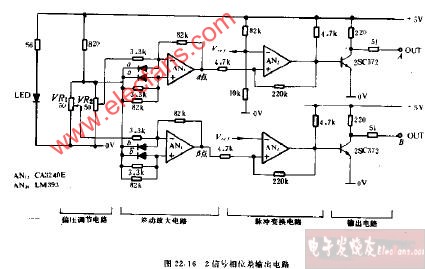
基于STM32的全相位FFT相位差測量系統(tǒng)
2015-11-09 17:51:2572 相位差精準(zhǔn)測量電路的設(shè)計(jì)
2017-01-22 13:26:5368 兩個(gè)頻率相同的交流電相位的差叫做相位差,或者叫做相差。 這兩個(gè)頻率相同的交流電,可以是兩個(gè)交流電流,可以是兩個(gè)交流電壓,可以是兩個(gè)交流電動(dòng)勢,也可以是這三種量中的任何兩個(gè)。兩個(gè)同頻率正弦量的相位差
2017-08-21 00:34:0046721 無人機(jī)巡檢作為一種使用可見光及紅外熱像儀等巡檢設(shè)備對輸電線路進(jìn)行巡視檢查的全新巡檢技術(shù),與人工巡檢相比具有許多優(yōu)點(diǎn)。
2018-01-17 10:13:059040 ,實(shí)現(xiàn)安全、成本、效能整體最優(yōu)。至2020年,持續(xù)完善直升機(jī)機(jī)群配置和基地建設(shè),實(shí)現(xiàn)直升機(jī)巡檢能力的優(yōu)化配置;優(yōu)化完善無人機(jī)巡檢管理和技術(shù)支撐體系建設(shè),各省(區(qū)、市)公司無人機(jī)巡檢系統(tǒng)按需配置,全面實(shí)現(xiàn)標(biāo)準(zhǔn)化作業(yè);全面開展輸電線路直升機(jī)、無人機(jī)和人工協(xié)同巡檢。
2018-04-01 09:50:286678 
相位差的測量在研究網(wǎng)絡(luò)特性中具有重要作用,如何快速、精確地測量相位差已成為生產(chǎn)科研中的重要課題。測量相位差的方法很多,有集成電路設(shè)計(jì)的,也有采用數(shù)字信號(hào)處理(DSP)實(shí)現(xiàn)的,現(xiàn)在普遍采用電子計(jì)數(shù)式的方法。
2019-02-06 08:38:003014 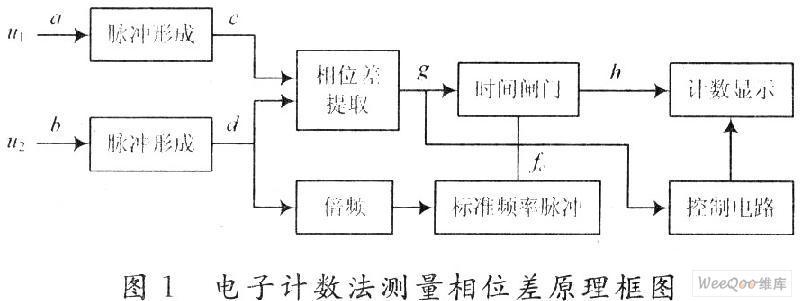
南方電網(wǎng)廣東電網(wǎng)公司通過自主研發(fā)的多旋翼無人機(jī)自動(dòng)駕駛技術(shù),實(shí)現(xiàn)“站到站”的自動(dòng)高精度繞塔巡視。
2018-11-25 10:42:062760 為滿足輸電線的巡檢需求,提高輸電線巡檢效率、安全性以及自動(dòng)化程度,提出了一種基于攝像頭的輸電線無人機(jī)自主巡線方案。無人機(jī)采用STM32F407為主控制芯片,用黑白攝像頭采集輸電線與背景的灰度圖像信息
2019-03-04 08:00:0015 測繪無人機(jī)采用RTK差分定位系統(tǒng)(可實(shí)現(xiàn)厘米級定位),這樣也是為了加快作業(yè)效率。
2019-06-21 17:00:306099 實(shí)時(shí)動(dòng)態(tài)差分法(Real-time kinematic,RTK)又稱為載波相位差分技術(shù)。
2019-07-17 17:44:434936 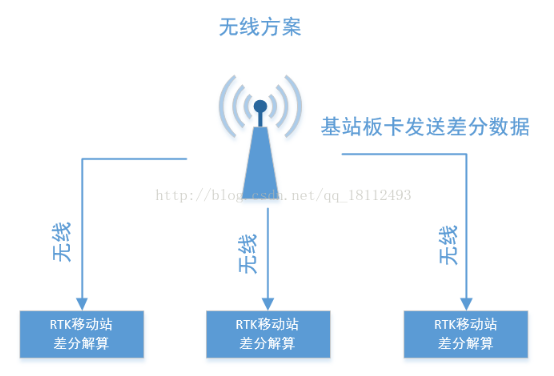
今年 7 月,應(yīng)西藏拉薩供電公司邀請,國網(wǎng)泰州供電公司輸電無人機(jī)巡檢團(tuán)隊(duì)對藏中電力聯(lián)網(wǎng)工程 500 千伏朗許線等線路進(jìn)行無人機(jī)全自主智能巡檢測試。測試全程采用大疆無人機(jī),成功達(dá)成各項(xiàng)考驗(yàn)指標(biāo)。這是我國首次在雪域高原實(shí)現(xiàn)無人機(jī)全自主電力巡檢,充分驗(yàn)證了高海拔地區(qū)自主巡檢的可行性。
2019-08-13 10:42:093702 12月4日,在河北省灤平縣金溝屯鎮(zhèn)220千伏金鐵一、二線35號(hào)—36號(hào)雙回鐵塔及線路上空,一架EWZ—S8多旋翼無人機(jī)按照既定RTK坐標(biāo),完成了“塔到塔”的自主飛行、自主巡檢、自動(dòng)拍照等輸電線路桿塔
2019-12-07 09:14:56722 自主巡檢成套裝備及無人機(jī)現(xiàn)場交接驗(yàn)收會(huì)在南京舉行,國家電網(wǎng)設(shè)備部、國網(wǎng)江蘇省電力公司設(shè)備部、中國電科院、江蘇省各地市供電公司及DJI大疆行業(yè)應(yīng)用、眾芯漢創(chuàng)齊聚南京,300臺(tái)大疆精靈4RTK及自主巡檢裝備將由江蘇方天電力技術(shù)有限公司交付給國網(wǎng)江蘇電力公司。
2020-01-13 10:42:005104 隨著近年來電網(wǎng)飛速發(fā)展,采用多旋翼無人機(jī)巡檢變電站設(shè)備也有效的提高了巡檢工作質(zhì)量。
2020-07-30 10:22:542408 業(yè)內(nèi)習(xí)慣將2015年稱為無人機(jī)在電力巡檢應(yīng)用的元年,這一年國家電網(wǎng)和南方電網(wǎng)相繼出臺(tái)無人機(jī)巡檢作業(yè)規(guī)范,如DL/T 1482-2015《架空輸電線路無人機(jī)巡檢作業(yè)技術(shù)導(dǎo)則》,無人機(jī)真正投入到電力
2020-10-12 11:59:261817 
等全過程自主巡檢任務(wù),實(shí)現(xiàn)了空中巡檢“人工操控巡檢”到“無人機(jī)自主巡檢”的跨越。這是無人機(jī)自主巡檢技術(shù)在承德地區(qū)縣區(qū)級供電公司首次可靠推廣應(yīng)用。
2020-11-05 11:40:14803 近日,國網(wǎng)金昌供電公司聯(lián)合復(fù)亞智能共同研發(fā)的輕客式無人機(jī)移動(dòng)機(jī)場投入使用,對轄區(qū)500多公里的線路進(jìn)行巡線。國網(wǎng)金昌供電公司作為甘肅省無人機(jī)自主飛行應(yīng)用示范先行單位,率先建成無人機(jī)全自主巡檢體系
2021-02-19 11:49:351303 音圈馬達(dá)無人機(jī)助力寧夏電力巡檢。近日,國網(wǎng)寧夏電力有限公司無人機(jī)自主巡檢樣板間壓力測試在國網(wǎng)寧夏高壓公司成功開展。無人機(jī)自主巡檢樣板間正式實(shí)體化落地運(yùn)用,標(biāo)志著寧夏全域無人機(jī)自主巡檢規(guī)模化應(yīng)用工
2022-01-06 15:59:06643 。此次應(yīng)用固定翼無人機(jī)巡檢輸電線路,在省內(nèi)電網(wǎng)系統(tǒng)尚屬首次。 據(jù)小編音圈馬達(dá)所知,輸電運(yùn)檢中心在現(xiàn)場用電腦,結(jié)合衛(wèi)星地圖,對所要巡視的雍歸線鐵塔進(jìn)行了精準(zhǔn)GPS定位,分上下左右劃定了4條飛行航線,又結(jié)合適時(shí)溫度、風(fēng)速和周邊環(huán)境,對
2022-06-30 14:21:28471 ?全相位FFT測相位差可通過取兩段存在延時(shí)關(guān)系的樣本分別進(jìn)?FFT(可加窗)譜分析,再取兩次譜分析的峰值譜線的相位值,并取其差值,即可提取相位差信息。但這種?法由于頻譜泄漏的原因,精度不?。我們
2022-12-06 20:45:427 實(shí)時(shí)動(dòng)態(tài)差分法(Real-time kinematic,RTK)又稱為載波相位差分技術(shù)。 這是一種新的常用的GPS測量方法。 以前的靜態(tài)、快速靜態(tài)、動(dòng)態(tài)測量都需要事后進(jìn)行解算才能獲得厘米級的精度
2023-02-08 09:31:024632 為進(jìn)一步深化無人機(jī)在海岸電臺(tái)的場景應(yīng)用,助推構(gòu)建“陸海空天”一體化水上交通運(yùn)輸安全保障體系,廣州通信中心聯(lián)同大疆無人機(jī)授權(quán)專業(yè)服務(wù)公司到蘿崗發(fā)信天線場地進(jìn)行無人機(jī)技術(shù)的應(yīng)用演示和深入交流,積極探索無人機(jī)自主巡檢天線的智能模式。
2023-02-08 10:42:38345 采用真實(shí)遙控器操作御2、M300RTK等無人機(jī),搭載可見光、紅外相機(jī),基于《變電站無人機(jī)巡檢技術(shù)規(guī)范》,模擬變電站巡檢流程,實(shí)現(xiàn)無人機(jī)起飛、飛行控制、巡檢、拍照、降落等全過程仿真。
2023-06-19 10:54:49330 北斗RTK(Real-Time Kinematic)高精度定位技術(shù)是一種利用衛(wèi)星導(dǎo)航系統(tǒng)進(jìn)行實(shí)時(shí)定位的方法,它通過測量衛(wèi)星信號(hào)的相位差來獲得非常精確的位置信息。其原理和優(yōu)勢如下: 原理: 載波相位差
2023-08-21 15:12:20690 雙頻RTK(Real-Time Kinematic)定位技術(shù)是一種利用衛(wèi)星導(dǎo)航系統(tǒng)進(jìn)行高精度實(shí)時(shí)定位的方法,它通過同時(shí)使用兩個(gè)不同頻率的載波信號(hào)來測量載波相位差,從而提高定位精度和抗干擾能力。以下
2023-08-25 18:19:21516 分技術(shù),是實(shí)時(shí)處理兩個(gè)測站載波相位觀測量的差分方法,英文全稱Real Time Kinematic,譯為實(shí)時(shí)動(dòng)態(tài),然后這個(gè)實(shí)時(shí)動(dòng)態(tài)是怎么來的,RTK現(xiàn)如今在智能駕駛中處于什么地位? RTK是將基準(zhǔn)站采集的載波相位發(fā)給用戶接收機(jī),進(jìn)行求差解算坐標(biāo)。載波相位差分可使定位精度達(dá)到
2023-08-28 10:34:59662 RC電路中相位差是如何引起的?電路中的相位差與哪些因素有關(guān)? RC電路中的相位差是由電容和電阻的不同特性所引起的。在RC電路中,電容器和電阻器的響應(yīng)時(shí)間不同,導(dǎo)致信號(hào)到達(dá)兩者之間相位發(fā)生變化。 首先
2023-11-21 16:00:361377 為了加快作業(yè)效率,測繪無人機(jī)采用RTK差分定位系統(tǒng)。據(jù)悉,如果采用普通GPS定位,為了校正誤差還需要派人去實(shí)地布設(shè)若干個(gè)像控點(diǎn);而RTK可實(shí)現(xiàn)厘米級定位,用了RTK則可以基本不用,或者只需要少量
2024-01-08 10:45:423120 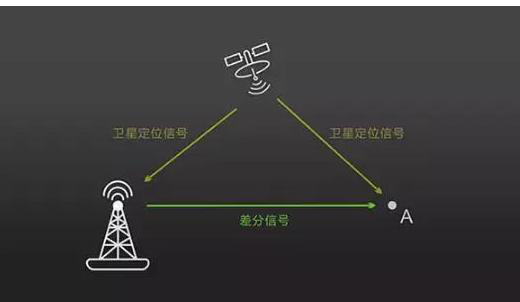
移相電路是指對輸入信號(hào)的相位進(jìn)行調(diào)整,以便實(shí)現(xiàn)對信號(hào)的相位移動(dòng)。相位差是指兩個(gè)或多個(gè)信號(hào)波形之間的相位差異。要了解引起相位差的原因,我們需要先了解相位、頻率和波形之間的關(guān)系。 相位是指用于描述信號(hào)
2024-03-11 15:49:29221
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論