三自由度直升機(jī)的嵌入式控制系統(tǒng)
三自由度直升機(jī)可以應(yīng)用于飛行器控制系統(tǒng)的半實(shí)物仿真試驗(yàn)和性能測試等場合,用以模擬橫列式直升機(jī),即傾轉(zhuǎn)旋翼機(jī)的直升機(jī)狀
2010-02-06 09:10:13 1238
1238 
英偉達(dá)在人工智能領(lǐng)域一騎絕塵,讓后面的企業(yè)望塵莫及,昨日,英偉達(dá)推出旗下Nvidia Isaac機(jī)器人平臺(tái),強(qiáng)勢布局機(jī)器人領(lǐng)域。
2018-06-05 08:54:31969 了。對(duì)于普通學(xué)生入門來說 一款合適的機(jī)器人平臺(tái) + 入門級(jí)的控制算法進(jìn)行試驗(yàn)。同時(shí)深入地學(xué)習(xí)相應(yīng)地理論知識(shí)。
2019-05-24 07:43:22
機(jī)器人運(yùn)動(dòng)控制技術(shù),盡管運(yùn)動(dòng)控制器需求增長迅速,但即便到明年,整體市場規(guī)模仍不到 10 億元。高性能工業(yè)機(jī)器人作為核心裝備,一直被國外品牌壟斷,而運(yùn)動(dòng)控制器的自主可控一直是國產(chǎn)機(jī)器人領(lǐng)域的一大痛點(diǎn)
2021-07-28 07:33:29
機(jī)器人的運(yùn)動(dòng)原理還是屬于最基本的簡單機(jī)械。機(jī)器人運(yùn)動(dòng)主要是依靠什么裝置?有些什么裝置是機(jī)器人用的比較多的?
2015-02-03 11:22:01
機(jī)器人平臺(tái)設(shè)計(jì)之a(chǎn)rduino基礎(chǔ)在構(gòu)建差分輪式機(jī)器人平臺(tái)時(shí),驅(qū)動(dòng)系統(tǒng)的常用實(shí)現(xiàn)有 STM32 或 Arduino,在此,我們選用后者,因?yàn)?Arduino 相較而言更簡單、易于上手。本節(jié)將介紹如下內(nèi)容:a
2021-09-10 08:17:36
本文從直升機(jī)衛(wèi)星通信系統(tǒng)的關(guān)鍵技術(shù)入手,結(jié)合工程應(yīng)用把問題一一展開。通過對(duì)系統(tǒng)全面的了解,對(duì)關(guān)鍵技術(shù)的確認(rèn),從而實(shí)現(xiàn)對(duì)系統(tǒng)的準(zhǔn)確測試。
2021-05-21 06:48:52
檢查、空域飛行、飛行中特情處理等。直升機(jī)CBT系統(tǒng)主要采用計(jì)算機(jī)仿真、計(jì)算機(jī)控制和圖像處理顯示等高新技術(shù),實(shí)現(xiàn)一個(gè)融圖形、圖像、文字、曲線、圖表、聲音為一體的多媒體仿真平臺(tái)。它可以為飛行員提供多方位
2019-06-10 05:00:05
直升機(jī)驅(qū)動(dòng)電路
2008-10-17 17:25:35
。重量應(yīng)足夠輕,以使直升機(jī)有機(jī)會(huì)像以前一樣有效運(yùn)作。如果可能的話,獲得原裝電池的更換將節(jié)省時(shí)間,并在更改后給直升機(jī)沒有任何情況。2.飛行時(shí)間這通常是您在主動(dòng)控制直升機(jī)時(shí)可能繼續(xù)飛行的時(shí)間。遙控直升機(jī)
2018-09-08 13:46:58
自動(dòng)或半自動(dòng)機(jī)器人常常需要嵌入式控制系統(tǒng),從而能夠結(jié)合高度智能化的確定性控制,并且可以方便地連接到不同的傳感器和執(zhí)行器上。NI提供了多種嵌入式硬件平臺(tái),以滿足復(fù)雜系統(tǒng)的需求。從尖端的機(jī)器人研究項(xiàng)目直至高級(jí)行業(yè)應(yīng)用,NI平臺(tái)被證實(shí)是高效的機(jī)器人解決方案。
2019-11-06 07:50:49
世界上第一架無人機(jī),無人機(jī)已經(jīng)經(jīng)歷了無人靶機(jī)、預(yù)編程序控制無人偵察機(jī)、指令遙控?zé)o人偵察機(jī)、復(fù)合控制和自主飛行多用途無人機(jī)的發(fā)展過程,現(xiàn)今無人直升機(jī)研究在于自主飛行控制。現(xiàn)今無人直升機(jī)任務(wù)多樣化和遠(yuǎn)距離作業(yè)需求,對(duì)無人直升機(jī)遠(yuǎn)距離通信和控制提出了更高要求。
2019-11-07 07:28:02
ZN-1AI工業(yè)機(jī)器人與智能視覺系統(tǒng)應(yīng)用實(shí)訓(xùn)平臺(tái)一、產(chǎn)品概述 ZN-1AI以工業(yè)機(jī)器人與機(jī)器視覺為核心,將機(jī)械、氣動(dòng)、運(yùn)動(dòng)控制、變頻調(diào)速、編碼器技術(shù)、PLC控制技術(shù)有機(jī)地進(jìn)行整合,結(jié)構(gòu)模塊化,便于
2021-07-01 10:07:13
` 元器件昨日,珠海航展極受關(guān)注的明星國產(chǎn)直-10和直-19武裝直升機(jī)均在航展現(xiàn)場亮相。 第九屆中國國際航空航天博覽會(huì)于13日在珠海舉行,中國軍隊(duì)MAX3232EUE+T多款戰(zhàn)機(jī)會(huì)亮相航展,這也
2012-11-12 15:40:47
基礎(chǔ)、機(jī)器人本體、電子控制設(shè)備、傳感器與導(dǎo)航和機(jī)器人電源系統(tǒng)等。《機(jī)器人設(shè)計(jì)與實(shí)現(xiàn)》是按照搭積木的方法指導(dǎo)機(jī)器人愛好者如何設(shè)計(jì)、制作機(jī)器人平臺(tái),如何賦予機(jī)器人智能,使機(jī)器人能夠運(yùn)動(dòng)、感知周圍的環(huán)境和服
2017-08-01 18:21:38
:使用該開發(fā)板作為機(jī)器人的主控板,在次平臺(tái)上添加網(wǎng)絡(luò)控制,藍(lán)牙控制。制作一個(gè)開放的機(jī)器人平臺(tái),可以對(duì)接上層的軟件控制,同時(shí)可以實(shí)現(xiàn)機(jī)器人算法的組合設(shè)計(jì),電腦通過藍(lán)牙手機(jī)通過APP與板子通信
2015-07-07 20:51:51
運(yùn)動(dòng)控制板卡,加上NXP芯片在汽車上應(yīng)用非常廣泛,強(qiáng)大的穩(wěn)定性非常適合做復(fù)雜的機(jī)器人邏輯,例如導(dǎo)航,路徑規(guī)劃,任務(wù)處理等。因?yàn)樘幚睚嫶蟮臄?shù)據(jù)庫,普通的單片機(jī)已經(jīng)不滿足使用,所以想在貴公司的開發(fā)板上實(shí)現(xiàn)
2018-01-22 10:32:40
申請理由:項(xiàng)目描述:根據(jù)NanoPi NEO開發(fā)板是Cortex-A7處理器,覺得可以應(yīng)用到我們開發(fā)的直升機(jī)飛行員用噴灑農(nóng)業(yè)作業(yè)控制器對(duì)藥液平衡配藥液和作業(yè)任務(wù)導(dǎo)航管理設(shè)備上去。我們了解linux系統(tǒng),在linux系統(tǒng)基礎(chǔ)上開發(fā)管理軟件,最后在飛機(jī)上試驗(yàn)調(diào)試。
2016-10-25 16:16:30
:使用該開發(fā)板作為機(jī)器人的主控板,在次平臺(tái)上添加網(wǎng)絡(luò)控制,藍(lán)牙控制。制作一個(gè)開放的機(jī)器人平臺(tái),可以對(duì)接上層的軟件控制,同時(shí)可以實(shí)現(xiàn)機(jī)器人算法的組合設(shè)計(jì),電腦通過藍(lán)牙手機(jī)通過APP與板子通信
2015-07-07 20:53:51
申請理由:看到你公司的機(jī)器人做工不錯(cuò)!想借助這個(gè)機(jī)器人平臺(tái),進(jìn)入這個(gè)行業(yè)!多向您們不習(xí)!項(xiàng)目描述:目前看市場上有好多掃地機(jī)器人,感到以后在做家務(wù)、陪護(hù)、護(hù)理方面機(jī)器人也會(huì)大有作為!
2015-10-29 14:14:42
`卡酷教育機(jī)器人是一款面向各個(gè)年齡段機(jī)器人愛好者為實(shí)現(xiàn)制作一款屬于自己的機(jī)器人而開發(fā)的教育機(jī)器人平臺(tái),迷你可愛的外形設(shè)計(jì),抓住每個(gè)愛好者的心靈體驗(yàn),采用Arduino Micro Robot 控制
2015-01-13 10:41:49
`上次說的那個(gè)直升機(jī)的圖片,最近忙,沒時(shí)間發(fā),今天送上`
2013-03-29 12:05:40
獨(dú)立控制一臺(tái)樂高機(jī)器人,表現(xiàn)出類似實(shí)際線蟲生物體的行為反應(yīng)。 在下方 demo 影片中,可以看見這臺(tái)灌了「虛擬線蟲」程式的樂高機(jī)器人,在前進(jìn)碰壁之後,它會(huì)跟真實(shí)世界的線蟲以「鼻尖」感應(yīng)到前方障礙
2015-03-04 16:50:09
什么是機(jī)器人控制系統(tǒng)?機(jī)器人的運(yùn)動(dòng)控制系統(tǒng)包含哪些方面?機(jī)器人控制系統(tǒng)的基本功能有哪些?
2021-10-11 09:38:12
ROVER C5 V0501 機(jī)器人控制系統(tǒng)采用國際流行的開放式軟硬件平臺(tái),配以自主研發(fā)的避障控制卡、牽引運(yùn)動(dòng)卡及機(jī)器人內(nèi)控專用編碼器和安全接口;
2019-09-12 09:00:12
《先進(jìn)機(jī)器人控制》從控制的角度系統(tǒng)地介紹了機(jī)器人學(xué)的基礎(chǔ)知識(shí)和當(dāng)前的發(fā)展?fàn)顩r。全書共分為12章,由基礎(chǔ)篇、控制結(jié)構(gòu)篇和先進(jìn)控制篇構(gòu)成。基礎(chǔ)篇著重介紹串聯(lián)關(guān)節(jié)機(jī)器人的運(yùn)動(dòng)學(xué)、運(yùn)動(dòng)規(guī)劃和動(dòng)力學(xué)。其中
2017-09-19 15:30:57
什么是機(jī)器人控制系統(tǒng)?機(jī)器人的運(yùn)動(dòng)控制系統(tǒng)包含哪些方面?機(jī)器人控制系統(tǒng)的基本功能有哪些?
2021-07-05 07:08:47
關(guān)于安川機(jī)器人平衡氣缸故障現(xiàn)象原創(chuàng)工業(yè)機(jī)器人輔導(dǎo)員工業(yè)機(jī)器人輔導(dǎo)員2019-10-12整理一個(gè)機(jī)械臂噪音的現(xiàn)象,如果現(xiàn)場發(fā)現(xiàn)此類現(xiàn)象請盡快對(duì)設(shè)備進(jìn)行檢修處理!具體視頻詳見公眾號(hào)安全事項(xiàng):這個(gè)還是要說
2021-09-07 08:21:54
無論時(shí)代如何變遷。在養(yǎng)育小孩的道路上。一直有一句8字真言。那就是“興趣是最好的老師。” 卡酷教育機(jī)器人平臺(tái)就是一款面向各個(gè)年齡段機(jī)器人愛好者為實(shí)現(xiàn)制作一款屬于自己的機(jī)器人而開發(fā)的教育機(jī)器人平臺(tái)
2015-01-13 11:06:26
實(shí)驗(yàn)名稱:直升機(jī)機(jī)身的多諧波多輸入多輸出振動(dòng)主動(dòng)控制試驗(yàn)研究
實(shí)驗(yàn)原理:首先采用一個(gè)由Z-11直升機(jī)地板模型縮比而來并且與Z-11直升機(jī)動(dòng)力學(xué)相似的框架模型作為研究對(duì)象,將壓電疊層作動(dòng)器整合
2024-02-27 17:12:00
我的天,當(dāng)時(shí)我正在運(yùn)動(dòng)場游玩,忽的一聲,來了一架直升機(jī),是一商人來我們學(xué)校了,很氣派呀!快畢業(yè)了,要工作了,真羨慕有錢人呀,所以我也要努力了,各位同仁都要加油喲!
2009-04-02 21:52:47
四足機(jī)器人屬于復(fù)雜機(jī)電系統(tǒng),需要綜合生物、機(jī)械、電子、控制等學(xué)科內(nèi)容,具體涉及仿生機(jī)構(gòu)設(shè)計(jì)、靈巧運(yùn)動(dòng)機(jī)構(gòu)設(shè)計(jì)、高性能驅(qū)動(dòng)器制造,行走穩(wěn)定性控制、強(qiáng)化學(xué)習(xí)等在內(nèi)的多個(gè)研究方向。其中,機(jī)構(gòu)設(shè)計(jì)是保障四足
2021-09-15 06:54:01
研究的前沿,它在一定程度上代表了一個(gè)國家的高科技發(fā)展水平。運(yùn)動(dòng)控制系統(tǒng)是機(jī)器人控制技術(shù)的核心,也是機(jī)器人研究領(lǐng)域的關(guān)鍵技術(shù)之一,在機(jī)器人控制中具有舉足輕重的地位,因此,各研究機(jī)構(gòu)都把對(duì)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)的研究作為首要任務(wù)。
2020-08-19 06:57:09
`最近這段時(shí)間做了一個(gè)基于樹梅派的視頻監(jiān)控機(jī)器人平臺(tái) Verybot 照片如下: 這個(gè)平臺(tái)的基本組成是:1、樹梅派 ( Raspberry pi ) 嵌入式計(jì)算機(jī);2、USB無線網(wǎng)卡( wifi
2014-01-21 21:17:04
驅(qū)動(dòng),它是一個(gè)機(jī)器人平臺(tái),上面裝有兩個(gè)單獨(dú)控制的輪式電動(dòng)機(jī)(見下圖)。 如果兩個(gè)電動(dòng)機(jī)均以相同的速度向前驅(qū)動(dòng),則機(jī)器人沿直線向前驅(qū)動(dòng)。 同樣,用于向后行駛。 如果一臺(tái)電動(dòng)機(jī)的運(yùn)行速度比另一臺(tái)電動(dòng)機(jī)快,例如,左馬達(dá)的運(yùn)行速度比右馬達(dá)快,則機(jī)器人將以曲線形式行駛-在這種情況下為右(或順時(shí)針)曲線。 最后,
2021-12-20 06:35:29
ZNAI-1工業(yè)機(jī)器人與智能視覺系統(tǒng)應(yīng)用實(shí)訓(xùn)平臺(tái)一、產(chǎn)品概述工業(yè)機(jī)器人與智能視覺系統(tǒng)應(yīng)用實(shí)訓(xùn)平臺(tái)以工業(yè)機(jī)器人與機(jī)器視覺為核心,將機(jī)械、氣動(dòng)、運(yùn)動(dòng)控制、變頻調(diào)速、編碼器技術(shù)、PLC控制技術(shù)有機(jī)地進(jìn)行
2021-07-01 11:48:31
ZN-RAI02工業(yè)機(jī)器人與視覺實(shí)訓(xùn)平臺(tái)一、概述1、ZN-RAI02工業(yè)機(jī)器人與視覺實(shí)訓(xùn)平臺(tái)以工業(yè)機(jī)器人與機(jī)器視覺為核心,將機(jī)械、氣動(dòng)、運(yùn)動(dòng)控制、變頻調(diào)速、PLC控制技術(shù)有機(jī)地進(jìn)行整合,結(jié)構(gòu)
2021-07-01 06:38:35
怎么實(shí)現(xiàn)三路超聲波避障移動(dòng)機(jī)器人平臺(tái)的設(shè)計(jì)?
2021-11-10 07:00:11
市場背景:近年來無人機(jī)掀起熱潮,多旋翼遍地開花,但無人直升機(jī)因較高的準(zhǔn)入門檻,控制系統(tǒng)開發(fā)難度較高,其配套產(chǎn)品始終不多。目前國內(nèi)無人直升機(jī)(非多旋翼)飛行控制器(以下簡稱飛控)商品化的產(chǎn)品只有DJI
2015-09-28 22:41:53
市場背景:近年來無人機(jī)掀起熱潮,多旋翼遍地開花,但無人直升機(jī)因較高的準(zhǔn)入門檻,控制系統(tǒng)開發(fā)難度較高,其配套產(chǎn)品始終不多。目前國內(nèi)無人直升機(jī)(非多旋翼)飛行控制器(以下簡稱飛控)商品化的產(chǎn)品只有DJI
2015-09-28 22:40:07
描述SwarmUS - 異構(gòu)機(jī)器人平臺(tái)該項(xiàng)目旨在打造一個(gè)全包平臺(tái),以使異構(gòu)群體機(jī)器人技術(shù)成為可能。PCB+展示代碼https://github.com/SwarmUS
2022-07-27 07:07:49
] ,神經(jīng)網(wǎng)絡(luò) [4] ,[13]和學(xué)習(xí)控制 [5],已用于設(shè)計(jì)無人直升機(jī)的飛行控制規(guī)律。提高自動(dòng)著陸,懸停和自動(dòng)飛行的性能。我們的動(dòng)機(jī)是為了發(fā)展一個(gè)無人直升機(jī),作為一個(gè)試驗(yàn)平臺(tái)驗(yàn)證我們提出非線性
2023-09-20 06:25:18
。由于旋翼式直升機(jī)具有一般直升機(jī)的可垂直起落、起降靈活,無需跑道、機(jī)動(dòng)性好、空中懸停等特性,使之較直翼無人機(jī)更適合作為空中中繼平臺(tái)。另外,它還具有結(jié)構(gòu)緊湊、機(jī)動(dòng)性更好等一般直升機(jī)不具有的特點(diǎn)。但它的結(jié)構(gòu)
2011-03-07 17:31:06
什么是機(jī)器人控制系統(tǒng)?機(jī)器人的運(yùn)動(dòng)控制系統(tǒng)包含哪些方面?機(jī)器人控制系統(tǒng)的基本功能有哪些?
2021-06-30 06:37:34
最近打算用樹莓派搞個(gè)機(jī)器人平臺(tái),原因如下: 1.樹莓派帶系統(tǒng) 帶個(gè)小顯示屏搞個(gè)鍵盤鼠標(biāo)就可以直接進(jìn)行編程調(diào)試不需要另外用電腦,畢竟單片機(jī)要用電腦設(shè)計(jì)然后上傳到單片機(jī) , 如果出門攜帶就沒有樹莓派方便
2015-11-10 10:19:02
驅(qū)動(dòng)電路板 7、用于驅(qū)動(dòng)電機(jī)的鋰電池 8、機(jī)器人底盤 目前在這個(gè)平臺(tái)上已經(jīng)實(shí)驗(yàn)的功能包括:1、基于wifi的機(jī)器人運(yùn)動(dòng)控制;2、基于wifi的視頻監(jiān)控;3、基于openCV的目標(biāo)檢測(目前只做了圓形目標(biāo)的檢測);4、基于openCV的色標(biāo)跟蹤;`
2014-09-18 15:33:45
什么是激光SLAM?激光SLAM技術(shù)在機(jī)器人運(yùn)動(dòng)控制系統(tǒng)中的應(yīng)用是什么?
2021-07-30 06:37:25
玩具直升機(jī)控制方案及IC 張s:***QQ:2873077376現(xiàn)有成熟遙控直升機(jī)方案,性價(jià)比優(yōu),含紅外遙控和無線遙控,可根據(jù)客人要求開發(fā),定制。
2016-04-06 10:10:44
1.2.7相撲機(jī)器人比賽1.3國內(nèi)的機(jī)器人比賽1.4競賽機(jī)器人平臺(tái)的主要功能思考題參考文獻(xiàn)第2章競賽機(jī)器人的控制器2.1引言2.2機(jī)器人控制器類型2.2.1串行處理結(jié)構(gòu)2.2.2并行處理結(jié)構(gòu)2.3三種
2019-12-25 07:00:00
請問一下四旋翼直升機(jī)姿態(tài)檢測與遙控電路該怎樣去設(shè)計(jì)呢?
2021-12-20 06:50:49
本項(xiàng)目通過飛思卡爾公司生產(chǎn)的 MMA7260QT 低 量程三軸向加速度傳感器和一片低功耗的MC9S08QG8 微控制器,配合極少量的外圍器件,無線遙控直升機(jī)接收控制電路。該電路能接收無線遙控發(fā)射機(jī)
2011-08-03 12:03:34
引言 本項(xiàng)目設(shè)計(jì)的是無線遙控直升機(jī)接收控制電路。本設(shè)計(jì)采用飛思卡爾公司生產(chǎn)的MMA7260QT低量程三軸向加速度傳感器和低功耗的MC9S08QG8 微控制器,并配合極少量的外圍器件。該電路能接
2018-10-29 14:55:14
存儲(chǔ)模塊中,當(dāng)遇到類似的計(jì)算的時(shí)候就可以判別事物,同時(shí)通過網(wǎng)絡(luò)模塊可以將這類信息傳遞出去分享給更多的機(jī)器人。單片機(jī)管理著機(jī)器人各類基礎(chǔ)的模塊,步進(jìn)電機(jī)控制機(jī)器人的運(yùn)動(dòng),各類傳感器讓機(jī)器人有了感知外界環(huán)境
2017-06-09 17:18:49
近距智能巡航直升機(jī)飛行器:遙控直升機(jī)。處理器:arduino單片機(jī)或avr單片機(jī)。模塊:gps定位模塊,gsm短信模塊,陀螺儀模塊,電源模塊,攝像頭模塊等。難點(diǎn):續(xù)航能力,障礙識(shí)別及規(guī)避,升降和盤
2012-07-18 12:34:43
`本人有塊遙控直升機(jī)的接收板,不知道板上的單片機(jī)是什么型號(hào),請論壇內(nèi)的大俠給鑒定一下。謝謝!`
2013-05-16 14:30:17
遙控直升機(jī)接收電路原理圖
2008-10-17 17:24:15
主要以多線數(shù)為主,作用與機(jī)器人領(lǐng)域相當(dāng),主要是幫助汽車自主感知道路環(huán)境,自動(dòng)規(guī)劃行車路線,并控制車輛到達(dá)預(yù)定的目標(biāo)。激光雷達(dá)是怎么幫汽車識(shí)別路口與方向呢?激光雷達(dá)使用的技術(shù)是飛行時(shí)間,就是根據(jù)激光遇到
2018-12-10 14:55:39
小型直升機(jī)LINUX 仿真系統(tǒng)構(gòu)建:無人直升機(jī)是一個(gè)極具挑戰(zhàn)性的多學(xué)科前沿性研究課題。介紹了小型直升機(jī)LINUX 仿真系統(tǒng)的構(gòu)建過程及其相關(guān)軟件實(shí)現(xiàn)。首先給出了小型直升機(jī)飛行控
2009-06-21 22:46:17 55
55 介紹了一個(gè)無人直升機(jī)監(jiān)控平臺(tái)的設(shè)計(jì)和實(shí)現(xiàn),重點(diǎn)是高精度定時(shí)器的實(shí)現(xiàn)和使用。以802.11b 協(xié)議實(shí)現(xiàn)無線網(wǎng)絡(luò)實(shí)現(xiàn)連接,以vc++ 6.0 作為開發(fā)平臺(tái)。通過多線程的引入,在接受圖形用
2009-08-10 09:21:3311 組建了一種基于嵌入式實(shí)時(shí)操作系統(tǒng)VxWorks 平臺(tái)的無人直升機(jī)控制系統(tǒng),實(shí)現(xiàn)遠(yuǎn)距離無人直升機(jī)飛行狀態(tài)信息傳輸,接收地面基站命令后完成自主定點(diǎn)飛行任務(wù)。主要利用基于優(yōu)先級(jí)
2009-08-14 15:58:1711 為提高武裝直升機(jī)的仿真逼真度,火控系統(tǒng)是仿真的關(guān)鍵。本文根據(jù)該型武裝直升機(jī)實(shí)際中的彈道性能參數(shù),以導(dǎo)彈運(yùn)動(dòng)規(guī)律模型為基礎(chǔ),對(duì)該型武裝直升機(jī)中的空地導(dǎo)彈仿真進(jìn)
2009-12-07 14:25:0215 為了在直升機(jī)模擬作戰(zhàn)平臺(tái)上實(shí)現(xiàn)任務(wù)規(guī)劃和戰(zhàn)法推演,使模擬直升機(jī)能夠具有和真實(shí)飛機(jī)相同的運(yùn)動(dòng)特性。從直升機(jī)戰(zhàn)法模擬這個(gè)工程應(yīng)用的角度出發(fā),通過直升機(jī)已知的部分
2009-12-14 15:08:3614 小型無人直升機(jī)是一個(gè)復(fù)雜的非線性系統(tǒng)。為了真正實(shí)現(xiàn)小型無人直升機(jī)的自主飛行,須對(duì)其進(jìn)行精確的數(shù)學(xué)建模。本文以Raptor90 小型無人直升機(jī)為研究平臺(tái),綜合考慮了直升機(jī)
2009-12-31 11:39:2556 本文論述了一種基于單片機(jī)的遙控機(jī)器人平臺(tái)設(shè)計(jì),著重論述了其控制系統(tǒng)軟硬件設(shè)計(jì)。此遙控平臺(tái)具有操作方便,控制靈活,成本低廉等特點(diǎn)。
2010-03-03 14:48:1968 小型無人直升機(jī)具有懸停、側(cè)飛、倒飛等獨(dú)特的飛行特性,能夠?qū)崿F(xiàn)固定翼飛機(jī)所不能完成的飛行動(dòng)作,在軍事和民用方面都有很大的應(yīng)用需求。飛行控制系統(tǒng)是小型無人直升機(jī)系
2010-10-27 16:44:14421 直升機(jī)電路圖
2008-10-17 13:18:124117 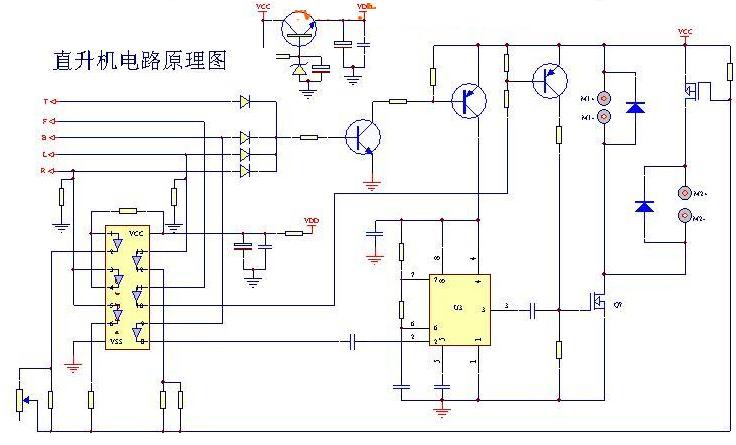
基于VxWorks的無人直升機(jī)控制系統(tǒng)設(shè)計(jì)
?? 摘? 要:??? 組建了一種基于嵌入式實(shí)時(shí)操作系統(tǒng)VxWorks平臺(tái)的無人直升機(jī)控制系統(tǒng),實(shí)現(xiàn)遠(yuǎn)距離無人直升機(jī)
2010-01-12 10:51:251269 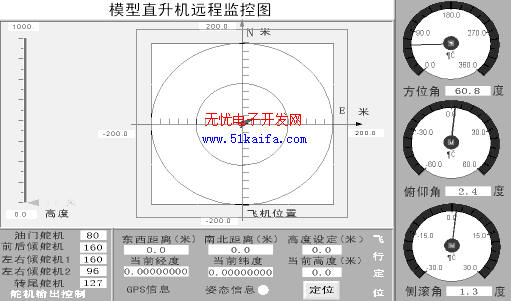
現(xiàn)有的簡單電動(dòng)遙控直升機(jī)絕大多數(shù)都是使用單一的手動(dòng)遙控方式,而采用單片機(jī)輔助控制的很少,我們設(shè)計(jì)的直升機(jī)克服了現(xiàn)有電動(dòng)遙控直升機(jī)簡單控制模式,在其基礎(chǔ)上增添了自動(dòng)飛行的功
2011-02-07 09:25:5640486 為滿足幕墻擦洗機(jī)器人平臺(tái)對(duì)控制系統(tǒng)實(shí)時(shí)性和并發(fā)性的要求,以C/OS-II實(shí)時(shí)操作系統(tǒng)(RTOS)為平臺(tái),針對(duì)本機(jī)器人的特定應(yīng)用開發(fā)了其軟硬件系統(tǒng)。介紹了擦洗機(jī)器人的功能結(jié)構(gòu)特征
2011-10-11 15:05:5041 設(shè)計(jì)了直升機(jī)著艦軌跡,采用動(dòng)態(tài)逆方法設(shè)計(jì)了直升機(jī)自動(dòng)著艦控制系統(tǒng),通過自適應(yīng)神經(jīng)網(wǎng)絡(luò),對(duì)動(dòng)態(tài)逆誤差進(jìn)行了補(bǔ)償,利用Matlab仿真工具箱,對(duì)無人直升機(jī)自主著艦的全過程進(jìn)行仿真驗(yàn)
2012-02-07 11:22:5018 中國浙江大學(xué)的研究人員研制出一款可用思想控制的四旋翼直升機(jī)。這款直升機(jī)能夠充當(dāng)殘疾人的眼睛,允許他們仔細(xì)觀察遠(yuǎn)處的物體。
2012-09-05 10:00:431295 四旋翼直升機(jī)具有4個(gè)呈交叉結(jié)構(gòu)排列的螺旋槳,其獨(dú)特的構(gòu)型能夠滿足復(fù)雜環(huán)境中的任務(wù)需求。文中設(shè)計(jì)了一種四旋翼直升機(jī)飛行控制系統(tǒng)軟硬件方案,通過傳感器實(shí)時(shí)采集四旋翼的姿
2013-07-25 17:09:54929 無人直升機(jī)的數(shù)學(xué)模型是設(shè)計(jì)先進(jìn)控制系統(tǒng)的基礎(chǔ),首先采用機(jī)理建模的方法分析了直升機(jī)的飛行力學(xué)特性,加入旋翼運(yùn)動(dòng),并得到了參數(shù)化狀態(tài)空間模型。辨識(shí)之前對(duì)實(shí)驗(yàn)數(shù)據(jù)進(jìn)行野
2013-09-18 10:44:450 制作小型直升機(jī)的詳細(xì)圖紙。
2015-11-09 17:57:550 嵌入式智能
機(jī)器人平臺(tái)研究!資料來源網(wǎng)絡(luò),如有侵權(quán),敬請?jiān)彛?/div>
2015-12-25 09:36:1611 無人直升機(jī)飛行控制系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)....
2016-01-06 11:41:1831 無人直升機(jī)旋翼轉(zhuǎn)速控制器設(shè)計(jì),喜歡的朋友可以下載來學(xué)習(xí)。
2016-01-15 17:52:5030 中型自主式足球機(jī)器人平臺(tái)設(shè)計(jì),感興趣的小伙伴們可以瞧一瞧。
2016-09-18 17:15:050 基于HRMRP機(jī)器人平臺(tái),可以完成豐富的機(jī)器人應(yīng)用,以較為典型的機(jī)器人導(dǎo)航為例,如何使用HRMRP來完成相應(yīng)的功能?本篇文章將詳細(xì)介紹如何將HRMRP應(yīng)用到實(shí)際的應(yīng)用當(dāng)中。
2017-02-08 11:40:111510 針對(duì)四旋翼直升機(jī)目標(biāo)跟蹤這一問題,提出并設(shè)計(jì)了一套基于視覺的四旋翼直升機(jī)系統(tǒng)和方法。首先,在Matlab中對(duì)四旋翼直升機(jī)建模仿真,使用經(jīng)典PID控制算法設(shè)計(jì)位置回路和姿態(tài)回路:其次,設(shè)計(jì)了一套
2017-11-14 10:25:379 如何實(shí)現(xiàn)無人直升機(jī)的穩(wěn)定控制是無人機(jī)學(xué)術(shù)研究領(lǐng)域所面臨的挑戰(zhàn)。 本文以X-Cell 60 SE直升機(jī)為研究平臺(tái),詳細(xì)介紹了模型直升機(jī)的動(dòng)力學(xué)方程,將各個(gè)因素考慮在內(nèi),并且將PID閉環(huán)控制方法應(yīng)用在模型直升機(jī)的建模中,使系統(tǒng)能夠
2018-01-13 10:54:161 飛行中的直升機(jī)上共有四個(gè)作用力,它們是升力,重力,推力和阻力。升力是旋翼在空氣中運(yùn)動(dòng)所產(chǎn)生的向上的力,重力與升力方向相反,是由地心引力產(chǎn)生 的。推力是驅(qū)動(dòng)直升機(jī)在空氣中前進(jìn)的力。阻力抵消升力和推力
2018-05-30 08:25:007292 針對(duì)水下機(jī)器人進(jìn)行水下檢測時(shí)的實(shí)時(shí)控制和監(jiān)控問題,對(duì)水下機(jī)器人的推進(jìn)器結(jié)構(gòu)、運(yùn)動(dòng)方式、通訊方式、機(jī)體狀態(tài)顯示方式、運(yùn)動(dòng)控制方法等方面進(jìn)行了研究,對(duì)水下機(jī)器人實(shí)現(xiàn)高效水下檢測所需的各功能需求進(jìn)行了歸納
2018-03-14 15:36:246 作為20世紀(jì)航空技術(shù)極具特色的創(chuàng)造之一,直升機(jī)極大的拓展了飛行器的應(yīng)用范圍。相對(duì)于固定翼而言,直升機(jī)的突出特點(diǎn)是可以做低空(離地面數(shù)米)、低速(從懸停開始)和機(jī)頭方向不變的機(jī)動(dòng)飛行,特別是可在小面積場地垂直起降。由于這些特點(diǎn)使其具有廣闊的用途及發(fā)展前景。
2018-08-16 11:24:265663 第一,就是它采用了共軸雙選翼結(jié)構(gòu)布局。這是俄羅斯卡-226T直升機(jī)的一個(gè)鮮明外在技術(shù)特征。其實(shí)提到直升機(jī)的共軸雙選翼結(jié)構(gòu)布局,人們第一時(shí)間會(huì)想到俄羅斯的直升機(jī),在一定程度上,共軸雙選翼結(jié)構(gòu)布局是俄羅斯直升機(jī)的代名詞。從結(jié)構(gòu)細(xì)節(jié)來看,卡-226T直升機(jī)的旋翼采用的是共軸反轉(zhuǎn)式3片槳葉的形式。
2018-08-27 14:13:385801 ANYbotics公司推出了一種名為ANYmal的四足機(jī)器人,它可以在海洋中的海上平臺(tái)上發(fā)揮作用。ANYmal在北海一個(gè)非常偏遠(yuǎn)的海上配電平臺(tái)測試了這種四足機(jī)器人。這種平臺(tái)本來需要兩個(gè)人在平臺(tái)上漫游并檢查設(shè)備,以確保一切正常。問題是人們不希望在如此遙遠(yuǎn)的地方工作。
2018-11-29 10:27:101334 近日,全球最大的消費(fèi)機(jī)器人公司iRobot宣布,已經(jīng)完成了對(duì)商用教育機(jī)器人平臺(tái)Root Robotics (簡稱Root) 的收購,將助力其加速布局教育機(jī)器人市場。
2019-06-26 15:02:092217 武裝直升機(jī)配有機(jī)載武器或火控系統(tǒng),是一種名副其實(shí)的攻擊性武器裝備,是直升機(jī)家族中的戰(zhàn)斗機(jī),被譽(yù)為“超低空空中殺手”、“坦克終結(jié)者”和“樹梢高度的威懾力量”。
2019-12-11 14:00:514642 它們既不是傳統(tǒng)的機(jī)器人,也不是已知的動(dòng)物物種。這是一種活的、可編程的有機(jī)體。
2020-01-14 16:58:35497 傾角傳感器在直升機(jī)上的應(yīng)用簡介 直升機(jī)是一種以動(dòng)力裝置驅(qū)動(dòng)的旋翼作為主要升力和推進(jìn)力來源,能垂直起落及前后、左右飛行的旋翼航空器。它主要由機(jī)體和升力、動(dòng)力、傳動(dòng)三大系統(tǒng)以及機(jī)載飛行設(shè)備等組成
2020-03-19 10:37:37924 空中客車直升機(jī)多用途雙發(fā)H160直升機(jī)獲得了歐洲航空安全局(EASA)的型號(hào)合格證,標(biāo)志著該項(xiàng)目正式進(jìn)入下一階段。空中客車直升機(jī)計(jì)劃在今年下半年獲得美國聯(lián)邦航空局(FAA)認(rèn)證后,將首架H160交付于未公開的美國客戶。
2020-07-22 08:26:402836 為了評(píng)估直升機(jī)杋體振動(dòng)水平,開展了槳轂交變載荷預(yù)估工作,以某型直升機(jī)為算例,采用綜合氣彈分析方法對(duì)其典型飛行狀態(tài)下進(jìn)行槳轂振動(dòng)載荷計(jì)算;通過模塊化方法建立某型直升機(jī)有限元模型,以計(jì)算一階通過頻率
2021-04-15 11:08:094 電子發(fā)燒友網(wǎng)站提供《SwarmUS群體機(jī)器人平臺(tái).zip》資料免費(fèi)下載
2022-07-21 09:18:022 電子發(fā)燒友網(wǎng)站提供《SwarmUS異構(gòu)機(jī)器人平臺(tái).zip》資料免費(fèi)下載
2022-07-25 14:37:522 電子發(fā)燒友網(wǎng)站提供《用于滅活生物有機(jī)體的紫外線機(jī)器人.zip》資料免費(fèi)下載
2022-11-24 09:20:400 已全部加載完成
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論