 電子發燒友App
電子發燒友App


我們將組裝我們的無人機框架,加載電機和電調,然后,我們將通過連接我們創建的飛行控制器和無線電接收器來完成電路部分。 我們將在這里使用的框架是 DJI F450 Quadcopter 框架。
除此之外,我們將使用 1400 kV 額定值的 BLDC 電機和一些螺旋槳。要記住的一件事是,每當我們將它們與 Quadcopter 一起使用時,我們都會使用兩種不同類型的螺旋槳。兩個螺旋槳屬于一種類型,每兩個螺旋槳又屬于不同類型。
了解組件
在進入裝配部分之前,首先需要了解我們將使用的組件,以便更好地了解您在做什么。因此,首先從組件部分:
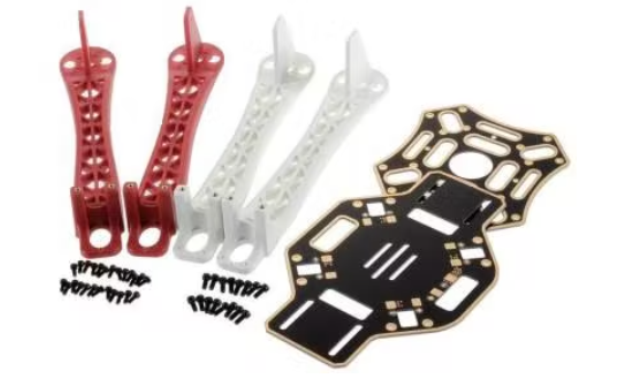
DJI F450 框架:我們使用的框架是四軸飛行器質量最好的框架之一。DJI F450 車架之所以如此命名,是因為它的對角軸距,即車架對角線對角端點之間的距離為 450 毫米。框架由超強材料制成,可抵抗碰撞。無人機的手臂旨在支持無人機的飛行。除此之外,還有一個集成配電板,可以輕松地在 ESC 之間分配電力,而無需為所有電調單獨連接。
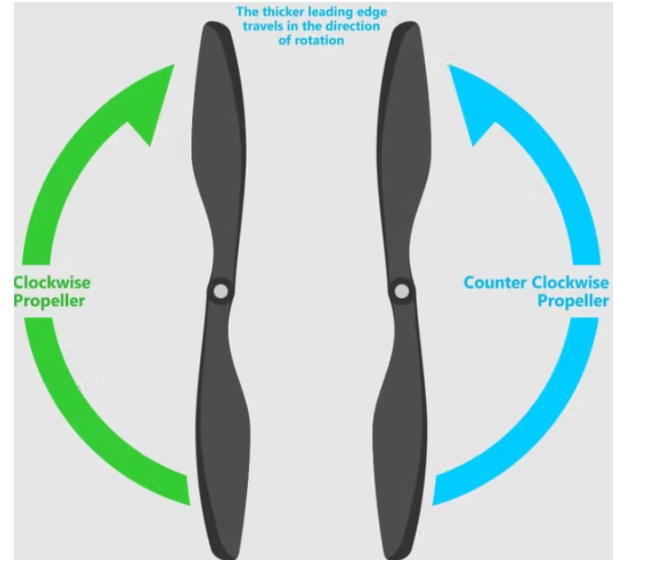
螺旋槳:螺旋槳是將旋轉運動轉化為線性推力的裝置。無人機螺旋槳通過旋轉和產生氣流為飛機提供升力,從而導致螺旋槳頂部和底部表面之間的壓力差。您可以獲得最大 3 英寸、3 英寸至 7 英寸、8 英寸至 10 英寸、11 英寸及以上的玻璃纖維螺旋槳以及螺旋槳配件。如果您想要輕量級和額外的強度,您也可以選擇碳纖維螺旋槳。螺旋槳有兩種類型。這些螺旋槳的葉片對齊方式有所不同,如果你比較它們,可以觀察到這一點。

BLDC 電機:無刷直流電機(也稱為 BLDC 電機或 BL 電機)是一種沒有電刷的電子換向直流電機。控制器向控制同步電機速度和轉矩的電機繞組提供電流脈沖。這些類型的電機在廣泛的速度范圍內產生大量扭矩方面非常高效。在無刷電機中,永磁體圍繞固定電樞旋轉并克服了將電流連接到電樞的問題。無刷電機的 Kv 額定值是指每伏特轉多少 RPM。BLDC 電機的 kV 額定值等于電機每 VOLT 的 RPM。因此,當施加 1 V電壓時,額定電壓為 1000 kV 的 BLDC 電機將以 1000 RPM 旋轉,如果施加 12 V電壓,電機將以 12000 RPM 旋轉。
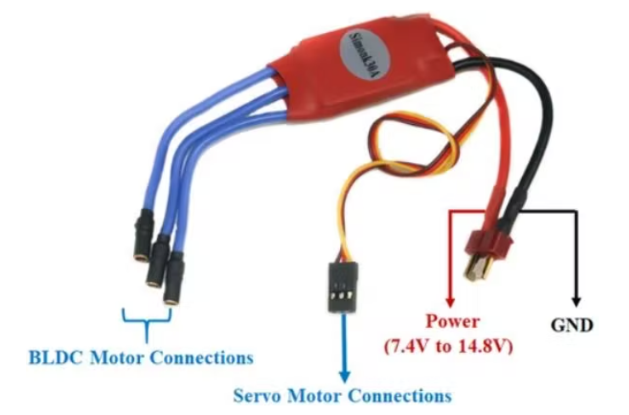
電子速度控制器:電子速度控制器 (ESC) 是一種控制和調節電動機速度的電子電路。它還可以提供電機反轉和動態制動。電子速度控制跟隨速度參考信號并改變場效應晶體管網絡的開關速率。通過調整晶體管的占空比或開關頻率,可以改變電機的速度。它的一側有兩個端子,為電調供電,另一側有三根線用于連接電機,另外三根線用于連接飛控,用于接收控制信號。使用 ESC,我們還可以提供 5V 的電源,我們將在這里進行。
組裝無人機框架
在這一步中,將完成無人機框架的組裝。連同框架,電機放置及其與 ESC 的連接將完成。因此,您需要按照以下說明準備好框架:
在框架配件中,您應該已經收到了兩個需要連接在框架臂之間的板。從這兩個盤子中,抓住較大的一個。您會觀察到板上有焊盤,上面有一些正負號。這塊板是無人機的配電板。
所以現在拿起這個配電板,將框架的四個腿連接到板上并用螺絲擰緊。現在在放置第二個盤子之前,您還需要完成一些其他事情。
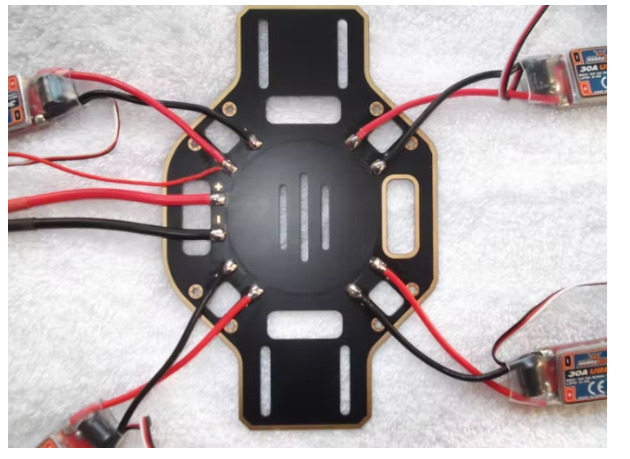
拿起電調,拆下連接在電調電源線上的連接器。您可以通過觀察連接到該連接器的電線數量以及連接器的尺寸來識別它。取下連接器后,拿起烙鐵,將電調的紅線連接到帶有“+”符號的焊盤,黑線連接到帶有“-”符號的焊盤。
對所有四個 ESC 重復該過程,然后以類似的方式連接 LiPo 電池,但通過一個開關連接電池,您可以在需要時打開或關閉該開關。
現在,借助電纜扎帶將 ESC 放置在無人機臂下,并將框架的頂板也放置好。

連接電調后,現在您需要將電機安裝到位,即無人機臂的末端,并用螺絲將它們擰緊。完成后,您將看到 BLDC 電機引出三根電線。您需要將這三根電線連接到從 ESC 出來的三根電線上。

取電機的中間線,即黃色線,將其連接到電調的中間線。根據需要連接其余兩根電線,我們稍后會對其進行調整。對所有四個電機重復相同的步驟,但記住此時不要連接螺旋槳。
至此,框架組裝完成。現在在下一步中,您需要校準 ESC 并調整電機旋轉方向。如何做到這一點將在下一步中具體討論。
校準電子速度控制器
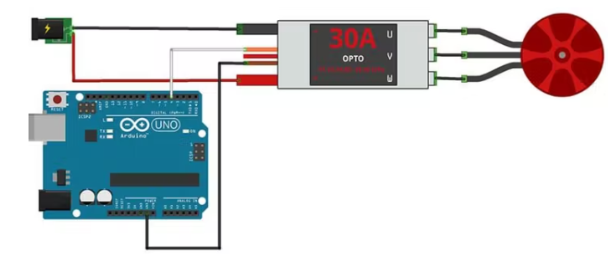
在此步驟中,您需要校準電調。通過在此處進行校準,我們的意思是說我們將通知我們的 ESC 它將在其之間運行的最大和最小限制。電調校準是必要的,以防止一些問題,例如電機不能一起啟動或某些電機的速度不是應該的。這些問題可以通過校準 ESC 來避免。這是一個非常簡單的過程,對于這個過程,我們需要一些跳線、一個 Arduino UNO 和我們在最后一步中制作的無人機框架組件。您需要按照以下步驟校準您的 ESC:
在開始該過程之前,請記住一件事,在此校準過程中,您不應將螺旋槳連接到電機上。
您應該已經注意到從您的 ESC 出來的連接器連接了三根細線。這些是您需要在此步驟中使用的電線。在三根電線中,一根是紅色的,一根是黑色的,一根是棕色/橙色的。
棕色線是信號線。從 ESC 上取下那根電線,并將其連接到 Arduino UNO 的數字引腳 6。同樣,將其他電調的信號線連接到數字引腳7、8和9,黑線即每個電調的GND線需要連接到Arduino UNO的GND引腳。
這將完成校準的連接。要記住的一件事是,此時不要將 LiPo 電池連接到 ESC,或者如果您已通過開關將它們連接,則暫時將開關置于 OFF 狀態,因為我們需要從 LiPo 向 ESC 供電ESC 在接下來的步驟中。

現在將 Arduino UNO 連接到 PC 并在本文下方跳轉至 Github 下載所需的代碼及庫文件。在 Github 存儲庫中,您將看到一個名為“ ESC_Calibrate.ino ”的文件。這是電調校準的代碼。在 Arduino IDE 中打開代碼。選擇正確的板和 COM 端口,然后點擊上傳按鈕。
代碼上傳后,打開串行監視器。在串行監視器上,您將看到程序已開始,之后將顯示打開電源。此時,您需要使用鋰聚合物電池為電調供電。連接鋰電池后。等待兩秒鐘,然后按 Enter。
串口監視器將顯示“電調已校準”,這意味著我們的電調已成功校準。現在要測試我們需要在串行監視器中輸入從 1000 到 2000 的任何值并按回車鍵。這將啟動電機,您將能夠看到電機是否已完美校準。要停止電機,您需要發送 1000 的值并以最大速度運行電機,您需要發送 2000 的值。介于兩者之間的任何值都會改變電機的速度。
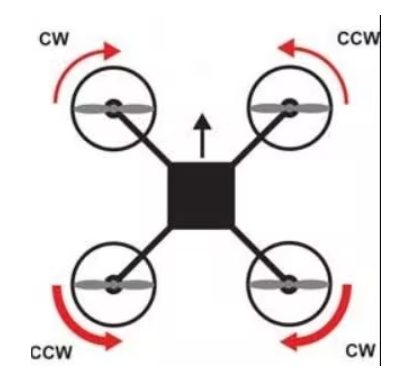
由于我們已經校準了電機,現在我們需要檢查電機旋轉方向是否正確。為此,您需要選擇無人機的前部。一旦你決定了無人機的前部,你需要確保無人機前部的左側電機和與之對角的電機,即在無人機后端右側的電機無人機順時針方向旋轉,另外兩個電機逆時針方向旋轉。只需交換 BLDC 電機中間信號線以外的兩根線,即可改變電機的旋轉方向。
完成此操作后,您可以移除用于校準 ESC 的 Arduino UNO,然后繼續下一步,將飛行控制器和無線電接收器連接并放置在無人機上。
將飛行控制器和無線電接收器連接到無人機

到目前為止,我們已經組裝了無人機框架并為我們的無人機校準了 ESC。現在在這一步中,我們將把我們制作的飛行控制器和無線電接收器放在無人機上,并進行最后的連接以完成無人機的設置。
首先,您需要將飛控盡可能放在中間,飛控的前端朝向無人機的前端。飛行控制器的前部可以通過 Multiwii 應用程序找到。在該應用程序中,當我們移動飛行控制器時,右側的動畫無人機會移動。因此,當動畫無人機上的箭頭朝向我們時,Flight Controller 面向筆記本電腦屏幕的一側就是 Flight Controller 的正面。
現在你有了飛行控制器的前部,所以把它相應地放在無人機上。將飛行控制器放置在無人機上后,將 Arduino 接收器也放置在無人機上。現在連接飛行控制器 Arduino 的 5V 引腳,并將其連接到接收器 Arduino 的 Vin 引腳。連接兩個 Arduino 的 GND 引腳。完成此連接是為了從飛行控制器上的 Arduino 向接收器上的 Arduino 供電。
電源共享連接后,我們需要將接收器的 PPM 引腳連接到飛行控制器。PPM 管腳是接收器 Arduino 的 D3 管腳,它在代碼中預先聲明,需要連接到飛行控制器的 Arduino 的 D2 管腳。
飛控和接收機對接后,需要將電調連接到飛控上,需要用到電調校準電調的線。將黑線(即所有電調的 GND 線)連接到飛行控制器電路的公共 GND 引腳。

連接 GND 引腳后。將棕色線即信號線從連接到左前電機的 ESC 連接到飛行控制器的 Arduino 的 D3 引腳。同樣,右前電機連接到 D10,左后電機連接到 D11,右后電機連接到 D9 引腳。這樣就完成了信號連接。
現在您需要將 ESC 出來的細紅線連接到 Arduino UNO 的 Vin 引腳。您只需要連接一根電線,它可以來自任何 ESC。該線用于為 ESC 能夠使用的 Arduino 提供 5V 電源。
現在您需要將 LiPo 電池連接到 ESC,并將飛控 Arduino 的一個單獨的 GND 引腳連接到 LiPo 電池的 GND。
這將完成無人機組裝的所有連接,我們可以說我們的無人機已經準備好飛行了。在下一步中,您將了解如何啟動無人機以及如何駕駛它。
啟動無人機

在這一步之前,我們一直在將無人機組裝、連接和一些裝置本身的的事情。但在這一步中,我們需要給我們的無人機做最后的潤色并嘗試讓它飛起來。所以現在,您需要做的是拿起螺旋槳并將它們連接到電機上。需要有一個類型的兩個螺旋槳和另一個類型的兩個螺旋槳,類似類型的螺旋槳應該連接到對角相對的電機上。螺旋槳應適當擰緊,因為電機旋轉非常快,螺旋槳仍有可能飛出,可能造成損壞。安裝好螺旋槳后,需要打開電調的電源。這個時候就能夠打開無人機了,但你可能會看到電機沒有運行。
這是因為我們需要在飛行之前布防我們的無人機。布防意味著啟動無人機,當無人機布防時,電機開始旋轉,但速度較慢。要給無人機布防,首先我們需要給發射器上電,并確保無人機放置在一個大而開闊的空間,。正確控制它以避免任何形式的損壞,請確保無人機處于開放和空曠的空間。現在要布防無人機,你需要握住左側操縱桿并將其帶到左下方位置并保持一兩秒鐘。確保將其帶到正確的位置,否則無人機將無法布防。一旦無人機電機開始運行,慢慢增加油門,即向上移動左操縱桿,這將增加無人機的速度,之后無人機就可以緩慢起飛了!

通過這種方式,我們已經能夠使用我們自己的四軸無人機了。根據我的個人經驗,我想補充幾句,那就是最好多帶 2 套螺旋槳,因為這些部件在有人制造無人機時肯定會壞掉。之后,使用 LiPo 電池測試儀。當 LiPo 電池接近設定的閾值時,它會發出聲音,并保護 LiPo 電池免受永久損壞,就好像電池電量低于某個值時,它會對電池造成不可逆轉的損壞。仔細進行連接,并始終在萬用表的幫助下仔細檢查它們是否存在一些可能的短路,并且只有在確保電路中沒有連接短路后才能連接電源。之前由于這個錯誤,我把一個 Arduino Nano 變為廢物了,所以要小心。盡可能使框架穩定且無振動,因為這可能會導致無人機失衡。確保所有螺釘和螺旋槳都足夠緊,以保持無人機穩定且無損壞。
最后一點,當你親手嘗試制作時,永遠不要失去希望,你可能還需要付出額外的一點努力。我自己在過程中也遇到了很多問題,但盡管如此,最后我還是完成了它,也飛了起來。至此,我將結束這篇文章。享受飛行!










 工商網監
工商網監
評論