 電子發(fā)燒友App
電子發(fā)燒友App


PX4是與平臺無關(guān)的自動駕駛儀軟件(或稱為固件),可以驅(qū)動無人機或無人車。它可以被燒寫在某些硬件(如Pixhawk v2),并與地面控制站在一起組成一個完全獨立的自動駕駛系統(tǒng)。 ? ?
PX4地面控制站被稱為QGroundControl,是PX4自駕系統(tǒng)不可分割的一部分,可以運行在Windows,OS X或Linux等多個平臺。 ? 使用QGroundControl,您可以將PX4固件燒寫到硬件,設置機器,改變不同的參數(shù),獲得實時航班信息,創(chuàng)建和執(zhí)行完全自主的任務。
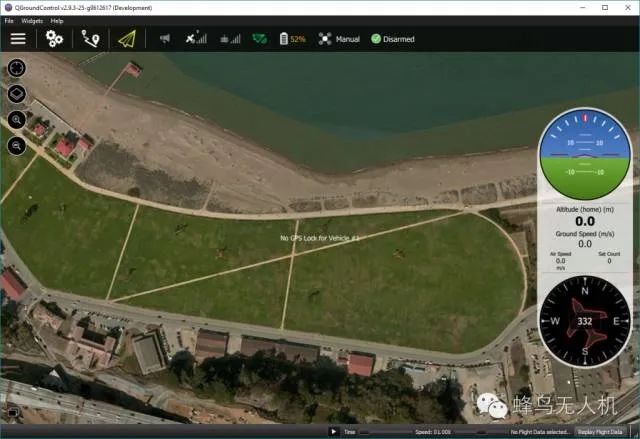
圖1 QGroundControl 主界面 ? 
(一)無人機PX4基本概念
機器頭朝向 不論是船還是飛行器都應該有機器頭朝向或定義其前向運動的方向為機器頭方向。清楚機器頭方向,以保證自駕儀同機器運動向量相一致極為重要!
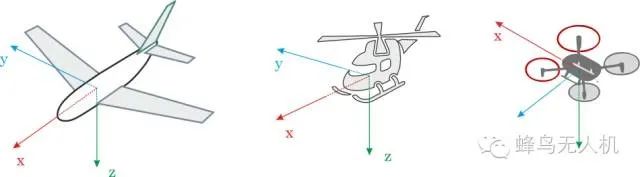
圖2 不同飛行器頭機體坐標 盡管對于多軸無人機來講自身因為有較高的對稱性而導致機器頭方向不明顯,但通常制造商會通過使用有顏色的槳或機臂來標示機器頭朝向。本文的插圖我們使用紅色槳來標示多軸飛行器頭朝向。 ?
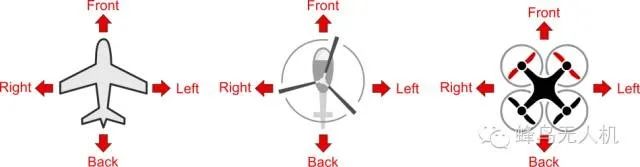
圖3 不同飛行器頭朝向
PX4連接
為了能夠?qū)δ腜X4無人駕駛儀進行配置、控制及交互,需要先對其進行連接。對于Pixhawk硬件有三種類型的連接: (1)遙控連接 – 通過無線電實現(xiàn)遙控器對飛控的連接。 (2)數(shù)據(jù)連接 – 使用數(shù)傳、WiFi或者USB線對QGroundControl地面站和無人機進行的連接。 (3)機外連接 – PX4和外部能夠控制PX4的微機之間的數(shù)據(jù)連接。 ? 遙控 對于無人機最基本的控制形式就是使用遙控器。目前有很多類型的遙控器,這里我們將通過使用最流行的飛行器遙控器進行講解。遙控器“MODE 1”和遙控器“MODE 2”之間的區(qū)別是根據(jù)不同人的用手偏好,將油門通道放在左側(cè)或右側(cè)。建議您進行嘗試后再決定購買以上兩種類型遙控器中的哪一種。
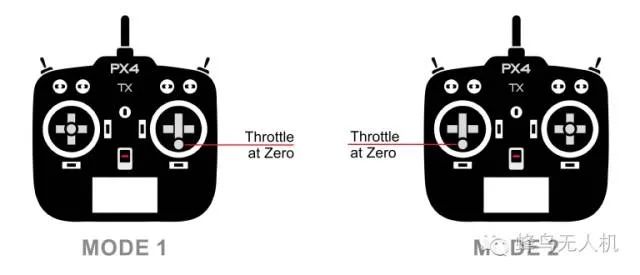
圖4 左圖右手油門,右圖左手油門
基本的飛行
為了控制您的飛行器,您需要知道并深刻理解基本的橫滾(Roll)、俯仰(Pitch)、偏航(Yaw)和油門(Throttle)指令及這些指令在三維空間施加到飛行器上所產(chǎn)生的運動效果。
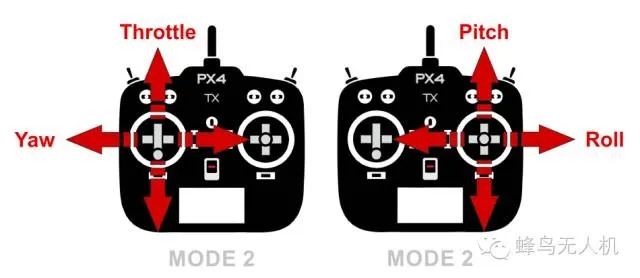
圖5 橫滾、俯仰、偏航、油門指令對應通道 以上指令被施加可懸停飛行器如直升機、多旋翼上和被施加到前向飛行飛行器如固定翼飛行器上,飛行器會產(chǎn)生不同的響應。 可懸停飛行器(如直升機、多旋翼或垂直起降無人機)的基本運動:

圖6 控制指令對四旋翼控制效果圖 需要牢記的是對于可懸停飛行器(多軸無人機,直升機)而言,橫滾指令會產(chǎn)生左移/右移飛行效果;俯仰指令會產(chǎn)生前進/后退飛行效果;偏航指令會產(chǎn)生基于飛行器中心點左旋轉(zhuǎn)/右旋轉(zhuǎn)飛行效果。
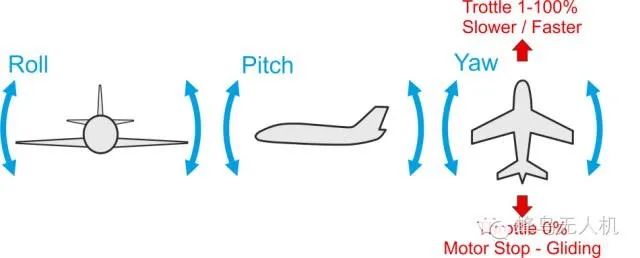
圖7 控制指令對固定翼控制效果圖 需要牢記的是對于前向飛行飛行器(固定翼無人機)而言,橫滾指令會產(chǎn)生左旋轉(zhuǎn)/右旋轉(zhuǎn)及轉(zhuǎn)彎飛行效果;俯仰指令會產(chǎn)生上升/下降飛行效果;偏航指令會產(chǎn)生尾翼的左旋轉(zhuǎn)/右旋轉(zhuǎn)及轉(zhuǎn)彎飛行效果。 使用以上4種基本的命令您可以在空中任何方向操控您的無人機進行飛行。最重要的是您將可以進行飛行器中最重要的飛行操作 - 起飛和降落。 ?
(二)PX4無人機機架選擇
機架選型 如果您計劃在無人機上使用PX4.在選機架之前,首先您應該回答的問題就是您的無人機的用途是什么。是用來完成某種工作還是只是為了娛樂?續(xù)航時間和覆蓋范圍要求是多少? 如果需要精準的懸停功能并且可以接受較短的續(xù)航時間,建議選用多旋翼無人機; 如果對續(xù)航時間和覆蓋范圍要求較高的話,建議選用固定翼無人機; 有一種混合類型的飛行器叫“垂直起降飛行器”,它可以像多旋翼一樣垂直起飛,起飛完成后變成像固定翼飛行器一樣前向飛行。 垂直起降飛行器集多旋翼無人機和固定翼多旋翼無人機優(yōu)點于一身,具有比多旋翼無人機更長的續(xù)航、更大的覆蓋范圍以及與固定翼無人機相比具有精準懸停的能力。 越來越多類型的機架已經(jīng)被調(diào)整地可以使用PX4進行完美飛行,例如DJI F450也就是風火輪F450機架。 具體有哪些飛控參數(shù)需要被調(diào)整以及如何調(diào)整這些參數(shù)以達到完美飛行,我們會在逐步深入講解中一一道來。
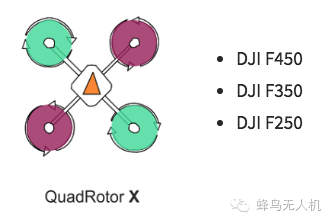
圖1 四旋翼無人機機架示意圖 (橙色三角指向為機器頭朝向,四個電機箭頭方向為電機轉(zhuǎn)向) ?
機架配置
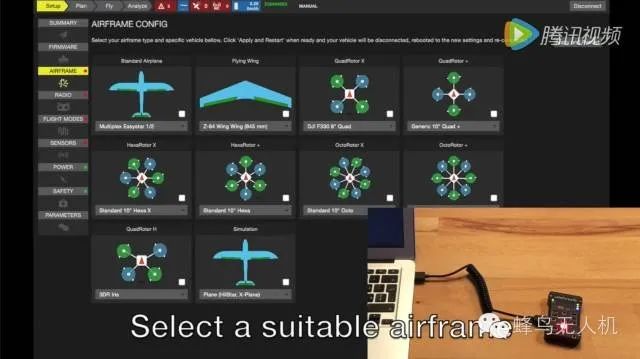
一旦選中并購買或組裝了機架后,在對無人機的飛控初始化階段,你需要從地面站QGroundControl中眾多的機架模板中選擇一款和你使用的構(gòu)造類似的機架。
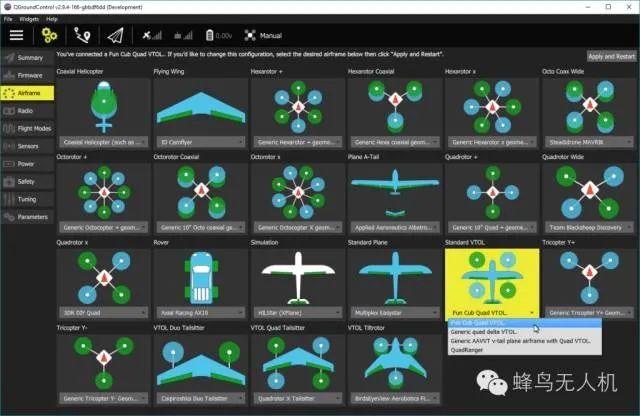
圖2 地面站QGroundControl中機架模板 ?
(三)PX4無人機飛控選擇
Pixhawk飛控
第一代Pixhawk飛控 所謂無人機的飛控,就是無人機的飛行控制系統(tǒng)。無人機飛控能夠穩(wěn)定無人機飛行姿態(tài),并能控制無人機自主或半自主飛行,是無人機的大腦。 Pixhawk是第一款專門為PX4自駕軟件而設計的無人機飛控。第一個版本的Pixhawk被命名為Pixhawk v1.也被稱作FMUv1.它包含PX4FMU和PX4IO兩部分。PX4FMU是Pixhawk v1飛控的核心控制部分,主要負責姿態(tài)解算等等算法的執(zhí)行;PX4IO主要負責飛控各外設接口的管理。

?
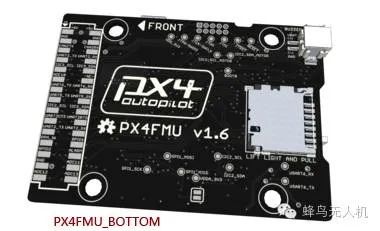
PX4FMU

?

PX4IO 第二代Pixhawk飛控 繼FMUv1飛控之后,第二代飛控被稱為Pixhawk v2或FMUv2. 在FMUv2這個版本飛控中,第一代中的PX4FMU和PX4IO被合并到了一個PCB上,成為了真正的一體化飛控。

Pixhawk v2 Pixhawk v2是當前最流行的Pixhawk飛控。 Pixhawk v2.4.5是Pixhawk v2的子版本。 開源硬件概念 Pixhawk飛控是開源硬件架構(gòu),所以全世界很多公司出品了基于Pixhawk的飛控產(chǎn)品。他們都有共同的硬件架構(gòu)和相同的連接方式、輸出接口及功能,僅僅是具體形式不同而已,例如接口的位置不同、外殼不同等等。 下面是一些衍生的Pixhawk控制器。 HKPilot32

Pixfalcon

AUAV-X2

所有的Pixhawk飛控都有同樣的連接方式和設置流程。 注:除了PX4這款自駕儀軟件,還有一種飛行協(xié)議棧(或稱自駕儀軟件)可以被燒寫到Pixhawk飛控,那就是非常流行的ArduPilot或稱為APM的自駕儀軟件。因此很多人覺得很困惑并以為把Pixhawk同APM相提并論是不對的。 請牢記,Pixhawk飛控是硬件平臺,而PX4和APM都是開源的可以燒寫到Pixhawk飛控中的自駕儀軟件。 高通驍龍無人機飛控

無人機畢竟只是飛行平臺,在飛行過程中,通常有很多的如圖像分析、避障以及許多的在線服務和系統(tǒng)集成等任務需要處理。 在驍龍飛控誕生之前,通常是使用樹莓派之類的微處理器與飛控協(xié)同工作,這種通常的集成方式有時很繁瑣,對于普通用戶而言很難成功實現(xiàn)。 高通公司解決了這個集成難的問題,并且真正地實現(xiàn)了把用于處理多任務的微處理器和飛控處理器集成到了一塊電路板上。 高通驍龍無人機飛控 這款飛控擁有四核CPU、一個功能的GPU以及很多的攝像頭和傳感器。它可以在使用PX4自駕儀軟件控制飛行器飛行的同時,還可以作為微機處理很多額外的任務。 ?
(四)PX4無人機傳感器選擇
無人機傳感器簡介 由于Pixhawk飛控已經(jīng)內(nèi)置了傳感器,PX4自駕儀完全可以在飛控沒有任何外部傳感器的情況下完成對無人機的飛行控制。 Pixhawk飛控內(nèi)置了三軸陀螺儀+三軸加速度計+三軸磁力計+氣壓計傳感器(氣壓計被用于獲取無人機高度信息)。 強烈建議在機上安裝GPS來釋放飛行器的全部潛力,并且安裝GPS后無人機可以在全自動模式下完成任務。 GPS/COMPASS ? 由于Pixhawk內(nèi)置的磁力計非常靠近其他的電子器件,所以它很容易受到電磁干擾。 為了減小這種干擾,通常可在飛控上再外接一個磁力計,并且盡量將該磁力計遠離飛行器上其他電子器件。 空速傳感器對于大部分的固定翼無人機及垂直起降無人機而言都是必須配備的。空速傳感器之所以如此重要,是因為除了空速計外PX4自駕儀沒有其他的手段來檢測失速。推薦使用數(shù)字空速傳感器。 空速計 ? 無人機測距 隨著時間的推移,市場上出現(xiàn)了越來越多廉價的激光雷達測距儀。這些傳感器通常被用于在無人機降落的最后階段進行高度精準測量,也可以被用于無人機避障。 PulsedLight發(fā)布了型號為Lidar-Lite2激光雷達測距儀,這款很經(jīng)濟的測量設備被廣泛運用在無人機等各種應用場景。它可以測量距離、速度和從0到40米距離內(nèi)的合作及非合作目標的信號強度。與同類發(fā)射單一光束的測距傳感器相比,該設備性能較好。 Lidar-Lite2 ? 無人機定位 在飛控外接了GPS模塊,且GPS信號良好的情況下,無人機可以融合GPS信號信息進行定位。但在沒有GPS信號的的情況下,通常光流傳感器被用來作為定位設備。 PX4FLOW

集成了聲吶傳感器的光流智能攝像頭可以進行運動跟蹤。聲吶和攝像頭的信息被送到Pixhawk飛控進行數(shù)據(jù)融合以實現(xiàn)定位功能。 ?
(五)PX4自駕儀初步配置
QGroundControl下載&安裝 環(huán)境 硬件:PC/Mac/移動終端、Pixhawk飛控 軟件:QGroundControl地面站 固件:PX4 QGroundControl支持列表

QGroundControl運行在以上列表平臺設備上,PX4固件運行在Pixhawk飛控上。 地面站連接飛控示意圖
使用電腦或移動終端下載對應平臺的QGroundControl地面站,完成QGroundControl安裝后,連接Pixhawk飛控,就可以開始對自駕儀PX4進行配置了。 ? 對PX4自駕儀的配置,請熟練掌握以下幾個知識: (1)機架選型,可以選擇直升機、多旋翼、垂直起降無人機等等; (2)校準自駕儀的傳感器并選擇正確的自駕儀放置方位; (3)校準遙控器; (4)配置遙控器上的開關(guān)來控制飛行模式。 除此之外,還有很多項是可以使用地面站進行配置的,但以上幾步是必不可少的。 ? ? QGroundControl視頻教程 視頻教程中主要內(nèi)容如下: 1、固件升級

2、機架選型
3、傳感器校準

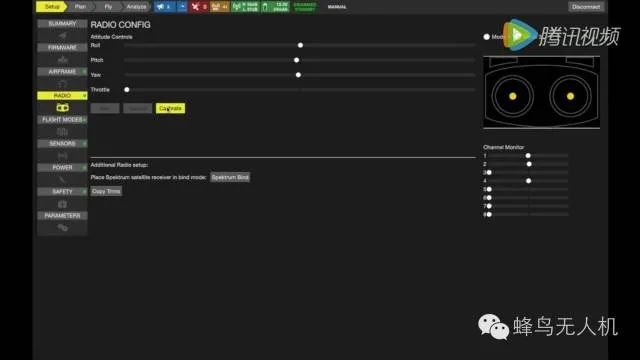
4、遙控器校準
5、飛行模式通道設置

注意:待地面站每一個選項卡右側(cè)的紅點變成綠點后表示該項校準完成,如未變成綠色,需要重復校準。 ?
(六)PX4無人機飛行模式配置
飛行模式配置步驟 環(huán)境 硬件:PC/Mac/移動終端、Pixhawk飛控、遙控器 軟件:QGroundControl地面站 固件:PX4 飛行模式?jīng)Q定了飛控如何響應用戶的控制信號。 PX4自駕儀支持多種飛行模式,但在實際使用中并需要配置那么多飛行模式,按需配置即可。 飛行模式配置步驟: 使用USB線或數(shù)傳連接pixhawk和QGroundControl; 使用QGroundControl配置所需PX4飛行模式(具體操作見下文); 使用遙控器或地面站控制PX4無人機飛行模式的切換。 注:如果遙控器和地面站同時連接了飛控,遙控器和地面站都可以切換飛控飛行模式。 ? 針對上文配置步驟中的第2點:使用QGroundControl配置所需PX4飛行模式。在此進行詳細講解。 使用QGroundControl可以指定遙控器的一個或多個通道來實現(xiàn)pixhawk飛控飛行模式的切換。通常把遙控器三段開關(guān)的每一段分配一種飛行模式,通過撥動該開關(guān)達到切換飛行模式的目的。 如下圖所示,選中通道,并指定該通道在不同數(shù)值范圍的飛行模式即可。 單通道控制飛行模式
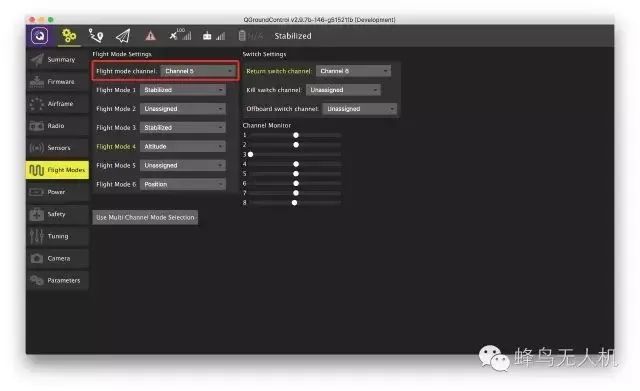
多通道控制飛行模式

在地面站中的飛行模式界面中為每種飛行模式選擇對應的遙控器通道,通過改變遙控器的通道值達到對飛行模式控制的目的。 飛行模式通道設置截圖
注意:待地面站每一個選項卡右側(cè)的紅點變成綠點后表示該項配置完成,如未變成綠色,需要重復操作。 ?
(七)PX4無人機硬件連接
PX4無人機硬件連接
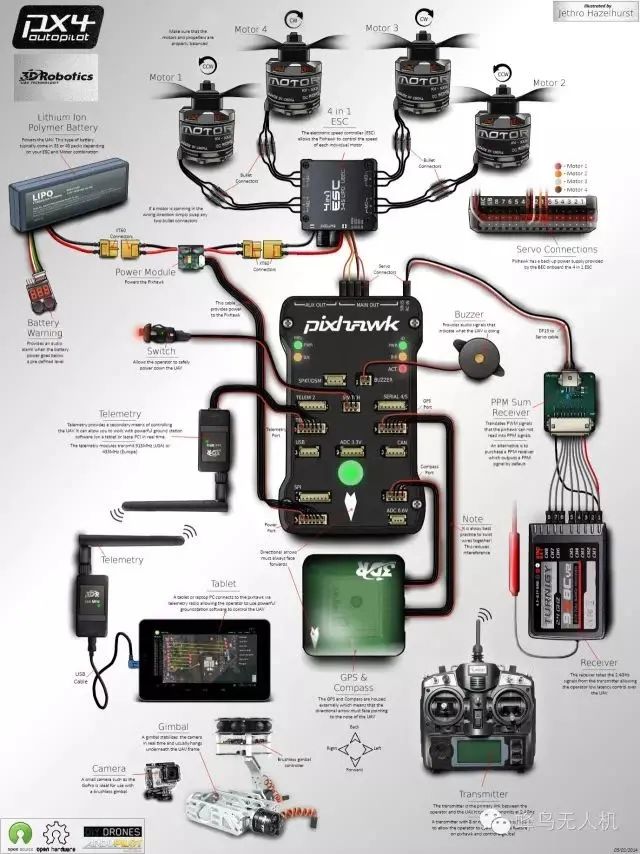
Note: The image above is from 3DR. 飛控(Pixhawk) 電源模塊(Power Module) 電池(Battery) 電池報警器(Battery Warning) 電調(diào)(ESC) 電機(Motor) 脈位調(diào)制信號接收器(PPM Sum Receiver) 遙控器接收器(Remote Controller Receiver) 遙控器發(fā)射器(Transmitter) 全球定位系統(tǒng)接收器和電子羅盤(GPS & Compass) 蜂鳴器(Buzzer) 安全開關(guān)(Switch) 數(shù)傳(Telemetry) 平板電腦(Tablet) 云臺(Gimbal) 相機(Camera) ? 以上設備清單中各項設備的作用和工作原理都比較容易理解,這里只對清單中標綠的幾項進行重點說明,破除知識盲點,避免入坑。 電池報警器 作用:本質(zhì)上是電壓檢測器,其主要目的是防止鋰電池過放; 工作原理:電池報警器可以自動檢測鋰電池總電壓和每個電芯的電壓,當電壓低于該報警器設定電壓值,就會觸發(fā)蜂鳴器鳴叫報警。 電機 作用:為無人機提供動力; 說明:上圖是一個航拍四旋翼的方案,所以只有4個電機,但Pixhawk飛控目前最多支持接入8個電機。一旦確定飛控的位置后,電機的轉(zhuǎn)向就確定了,如果出現(xiàn)非理想電機轉(zhuǎn)向,只需交換電機三根線中的任意兩根即可。 脈位調(diào)制信號接收器 作用:將遙控器接收器的多路PWM信號轉(zhuǎn)換成一路PPM信號并輸出給Pixhawk; 工作原理:通常遙控器接收器輸出的信號是PWM信號,而Pixhawk無法解碼PWM信號,所以需要PPM模塊將遙控器接收器的PWM信號轉(zhuǎn)換成PPM信號并輸出給Pixhawk。但這個單獨的PPM模塊并不是必須的,因為有些遙控器接收器本身就可以輸出Pixhawk可以解碼的PPM信號。 電子羅盤 作用:為無人機提供方位數(shù)據(jù); 說明:Pixhawk飛控本身具有電子羅盤,然而內(nèi)置電子羅盤易受電機及其他電路干擾,外接電子羅盤通常被放置在電磁干擾比較小的位置,以獲得更可信的方位數(shù)據(jù),強烈推薦安裝外置羅盤。 平板電腦 作用:無人機地面站軟件運行硬件平臺; 工作原理:地面站可以通過數(shù)傳對無人機進行設置和控制,由于地面站支持多平臺,所以也可以使用PC或Mac等代替平板電腦。 ?
(八)PX4無人機任務規(guī)劃與執(zhí)行
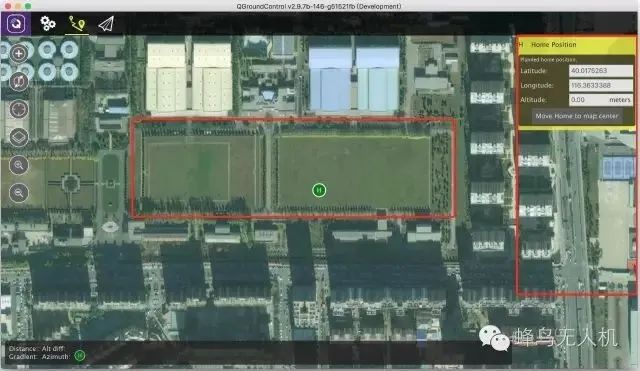
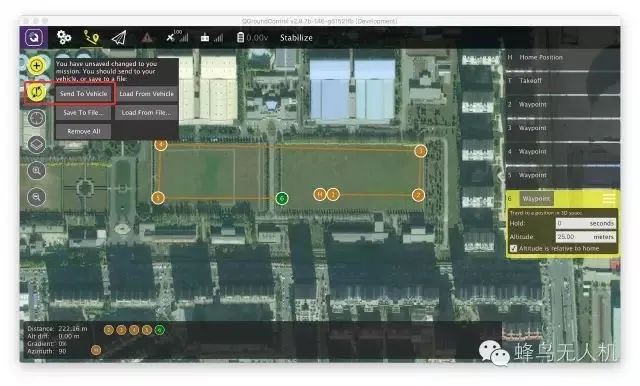
飛行任務規(guī)劃 PX4無人機飛行任務規(guī)劃非常簡單,只需要點擊QGroundControl地面站最上面一排選項卡切換到任務視圖(選項卡變成黃色表示被選中),點擊左上角的(加號)圖標,然后點擊屏幕地圖即可進行任務規(guī)劃。 任務規(guī)劃前任務視圖
需要注意的是,只需要點擊一次左上角加號,就可以通過在屏幕上進行連續(xù)多次點擊設置多個航點,按照航點順序會自動生成航線。 每個航點信息會顯示在地面站右側(cè),同時可以編輯航點的停留時間、相對高度等信息。 例如下圖中無人機將在航點6停留0秒,相對歸航點(Home Position)的高度為25米。
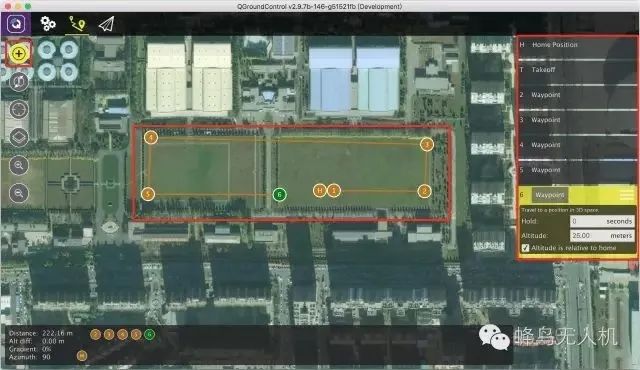
任務視圖底部顯示的是每個航點和上一個航點的相對距離(Distance)、相對高度(Alt diff)、傾斜度(Gradient)等信息。 例如航點1和航點2的相對距離為176.76米,相對高度為25米,則傾斜度為tanα=25/176.76≈14%。 以上操作后,點擊左上角任務發(fā)送按鈕(Send To Vehicle),即可將規(guī)劃好的任務發(fā)送給無人機。 發(fā)送飛行任務到無人機
完成上述任務規(guī)劃及任務上傳后,將地面站切換到飛行視圖,解鎖PX4無人機,無人機即可自動按照規(guī)劃好的任務路徑進行飛行,地面站將實時顯示無人機飛行軌跡。 ? QGroundControl地面站進行任務規(guī)劃相對比較簡單,但在飛行任務執(zhí)行階段需要確保場地滿足飛行要求,以保證安全飛行。 ?
編輯:黃飛
?









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論