 電子發燒友App
電子發燒友App


一、項目背景
門禁系統是現代社會中非常重要的安全控制系統之一,其功能是在保障建筑物安全的同時,為合法用戶提供便利。當前設計一種基于STM32+RC522的門禁系統設計方案,通過RFID-RC522模塊實現了對用戶卡的注冊、識別及身份驗證,通過控制SG90舵機實現門鎖的開關,具有較高的安全性和可靠性。實驗結果表明,該門禁系統可以有效地保障建筑物的安全性。
門禁系統廣泛應用于各種建筑物、企事業單位,用于管理人員的進出、控制人員活動范圍、實現安全監控等功能。傳統的門禁系統采用密碼輸入或刷卡的方式進行身份驗證,但存在易被破解的風險。基于RFID的門禁系統已經成為一種相對先進的安全控制方案。
本次設計的STM32+RC522門禁系統,通過RFID-RC522模塊對用戶的卡進行注冊、識別完成身份識別,對門鎖進行開關。系統帶了OLED顯示屏,輸入用戶密碼登錄之后,可以對新卡片進行注冊,添加新卡片,對不使用的卡片進行注銷。在系統里,IC卡的數據都存儲在卡的內部扇區里,通過卡的內部空間進行管理。
采用5V-步進電機的版本:

二、系統設計
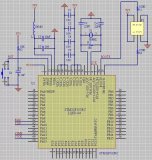
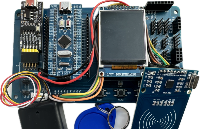
門禁系統由STM32F103C8T6單片機、RFID-RC522模塊、SG90舵機、LCD1602液晶顯示屏、鍵盤模塊等組成。其中,STM32F103C8T6單片機作為系統的核心控制器,控制程序的執行;RFID-RC522模塊作為識別用戶卡片的設備;SG90舵機作為門鎖控制設備;OLED顯示屏提供用戶輸入信息和系統信息的顯示;鍵盤模塊方便用戶進行密碼和卡片信息的輸入。
2.1 軟件設計
【1】RFID卡信息管理
本系統采用卡的內部空間進行IC卡信息的管理。每個IC卡可以分為多個扇區,每個扇區包含多個塊,每個塊包含16個字節。扇區0是廠家已經預留好的,用于存儲卡片的序列號,扇區1-15可以由用戶自己配置,用于存儲一些私有數據,如用戶身份、車牌號、員工編號等。
在本系統中,IC卡信息的管理主要包括三個方面:新卡片注冊、卡片識別和注銷卡片。
對于新卡片的注冊,用戶需要按下鍵盤上的“#”鍵進入注冊模式,接著輸入管理員密碼,然后將新卡放到RFID讀寫器上,系統將讀取卡片序列號,并在卡片的扇區中存儲用戶名和密碼信息等。
對于卡片的識別,當用戶按下門禁系統的確認鍵時,系統將讀取RFID模塊中讀取的卡片序列號,并去卡片扇區中查詢用戶名和密碼信息,進行身份驗證。如果卡片識別成功,系統將控制舵機旋轉一圈實現開鎖功能。
對于注銷卡片,管理員需要輸入密碼進行身份驗證后,再將要注銷的卡片放到RFID讀寫器上,系統將清空該卡片的扇區內所有數據。
【2】門禁系統安全控制
本門禁系統采用密碼驗證和卡片識別相結合的方式,提高了系統的安全性。具體來說,系統要求用戶輸入密碼或刷卡進行身份驗證,只有在驗證成功后才能控制門鎖進行開關操作。同時,系統還可以記錄每一次開啟門鎖的時間和用戶信息,以便管理員進行安全監控。
【3】門鎖控制
本門禁系統采用SG90舵機控制門鎖的開關,具有結構簡單,控制方便的優點。在門鎖控制過程中,系統對舵機控制信號的頻率和占空比進行精細控制,以實現門鎖的準確開關。
2.2 硬件設計
【1】STM32F103C8T6單片機
STM32F103C8T6單片機是ST公司推出的一款基于Cortex-M3內核的可編程32位單片機,常常被廣泛應用于工業控制、智能家居、嵌入式控制等領域。

它的主要特點包括:
?
?1. Cortex-M3內核:STM32F103C8T6使用Cortex-M3內核,具有高性能、低功耗、硬實時等特點,可支持多個串口、I2C、SPI、USB等外設,為使用者帶來更大的靈活性。 ?2. 32位處理能力:STM32F103C8T6是一款32位單片機,具有比8位、16位單片機更高的數據運算能力、編程靈活度和計算精度。 ?3. 較強的系統時間管理能力:STM32F103C8T6內部具備RTC實時時鐘模塊,可實現精準的時間管理和時間標記功能,在一些需要時間同步的應用場景下具有較大的優勢。 ?4. 大存儲容量:STM32F103C8T6內置64K字節的閃存和20K字節的SRAM,能夠滿足大型嵌入式應用的存儲需求。 ?5. 豐富的外設接口:STM32F103C8T6支持多個外設接口,如SPI、I2C、CAN總線等,方便開發者擴展相關應用場景。 ?6. 代碼可移植性強:由于該芯片應用廣泛,可以使用多種開發工具進行開發,例如Keil、STM32CubeMX等,而且支持多種編程語言,如C語言、C++等,因此優點很容易在不同的平臺、不同開發者之間實現代碼的移植。
?
【2】RFID-RC522模塊
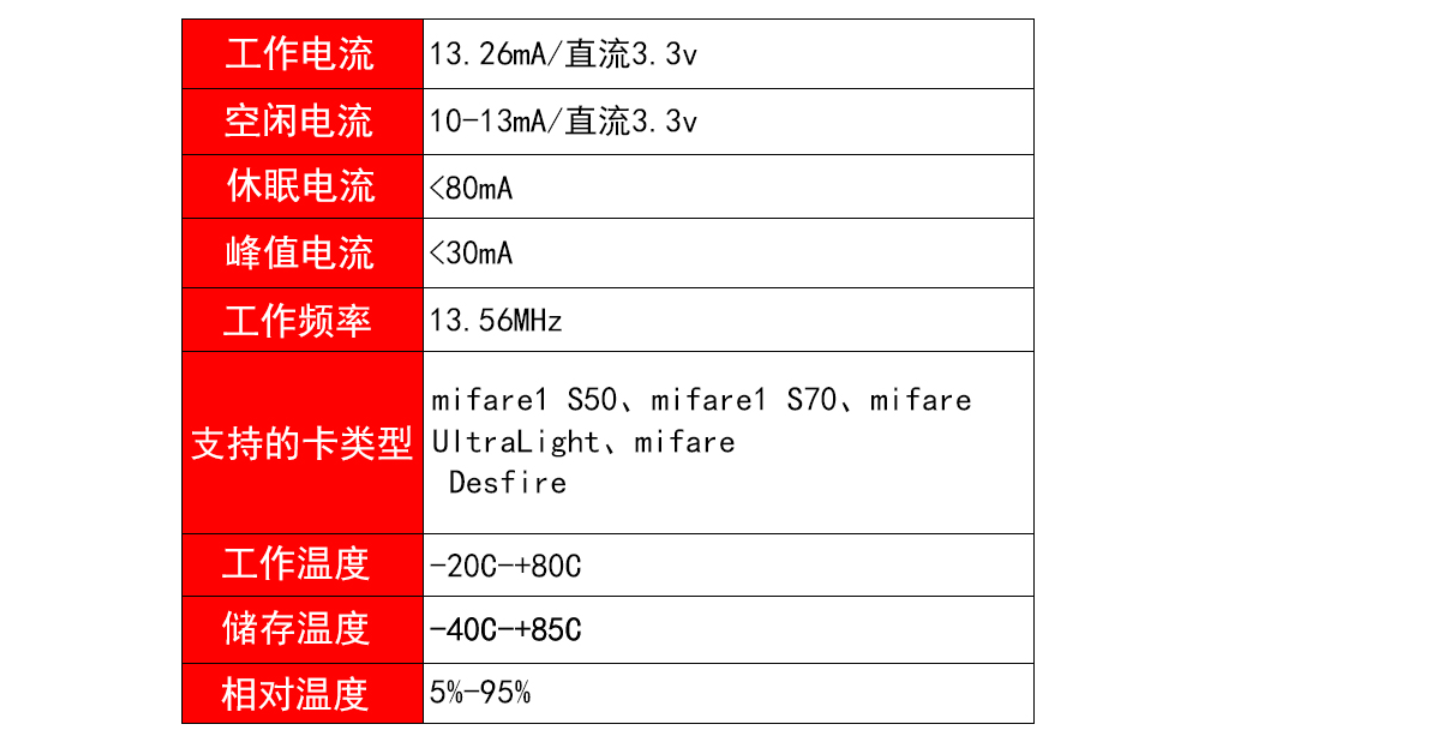
RFID-RC522模塊是一種低成本、高性價比的RFID讀寫模塊。它具有高精度、快速讀取等特點,廣泛應用于門禁系統、智能卡管理、物流追蹤等領域。

RFID-RC522模塊的特點如下:
?
?1. 高精度:RFID-RC522模塊采用射頻感應技術進行信號傳輸和讀寫,具有高精度、穩定性強等優點。 ?2. 快速讀取:RFID-RC522模塊讀取速度快,一般只需0.1秒左右就可以完成讀取操作。 ?3. 支持多種協議:RFID-RC522模塊支持ISO14443A/B、FeliCa等多種RFID協議,可滿足不同應用場合的需求。 ?4. 低功耗:RFID-RC522模塊功耗低,工作電流為13-26mA,待機電流為10A。 ?5. 接口簡單:RFID-RC522模塊采用SPI接口進行通信,模塊上的引腳有7個,具有很好的兼容性。 ?6. 支持多種開發語言:RFID-RC522模塊支持多種開發語言,如C++、Python等,方便開發者進行二次開發。
?
RFID-RC522模塊的使用需要配合相關的庫文件,在Arduino、Raspberry Pi等開發板上進行代碼編寫和開發。常見的使用場景包括門禁系統、智能卡管理、出入庫管理、物流追蹤等領域。
【3】SG90舵機
該舵機小巧耐用,可以精確地控制門鎖的開關。
SG90舵機是一種小型舵機,體積小、重量輕、價格低廉,常常被用于模型飛機、小型機械臂、玩具模型等領域。它采用了直流電機,利用PID控制技術,以及精密的小齒輪減速箱實現轉向角的控制。

SG90舵機的特點如下:
?
1. 采用IIC總線通信:IIC接口的4x4電容矩陣鍵盤模塊通過IIC總線通信連接到MCU,簡化了連接方式,方便使用。 2. 采用電容式按鍵設計:每個按鍵上放置一個電容器,當手指觸摸到按鍵時,電容器的電容值發生變化,通過檢測電容的變化實現按鍵檢測。 3. 4x4矩陣排列式設計:4x4電容矩陣鍵盤模塊采用矩陣排列式設計,一共有16個按鍵,可以滿足較為復雜的應用場景。 4. 接口簡單:IIC接口的4x4電容矩陣鍵盤模塊只需要SCL和SDA兩條線連接到MCU即可。 5. 高靈敏度:電容式按鍵設計使得按鍵檢測更加靈敏,而且不會產生按鍵輕微彈起的誤觸情況,使用更加舒適。 6. 代碼簡潔:使用該模塊并不需要編寫復雜的按鍵掃描程序,只需要通過讀取IIC總線上的按鍵值即可。
?
SG90舵機在使用時需要通過PWM信號進行控制。
【4】0.96寸OLED顯示屏
0.96寸SPI接口OLED顯示屏是一種小型化的屏幕,屬于OLED顯示技術,采用SPI接口連接,外觀尺寸約為12mm * 12mm,分辨率一般為128 * 64或者128 * 32。它可以用于各種小型電子設備,例如手持設備、小型儀器、智能家居控制面板等等。
OLED即有機發光二極管,與傳統的液晶顯示屏相比,OLED具有響應速度快、視角范圍廣、色彩鮮艷、亮度高等優勢。SPI接口則是一種串行外設接口,具有簡單、靈活、高速等特點。

0.96寸SPI接口OLED顯示屏的驅動芯片一般為SSD1306,有128個列和64個行的像素,還有一些有128個列和32個行的像素。其中,128 * 64像素的屏幕顯示面積較大,在顯示圖像和文字時更加清晰和細膩。0.96寸SPI接口OLED顯示屏具有小巧、高清、高速等優點,被廣泛使用在各種小型電子設備中。
【5】鍵盤模塊
該模塊可以方便地輸入密碼和卡片信息。
IIC接口的4x4電容矩陣鍵盤模塊是一種基于IIC總線通信的電容式按鍵模塊,常常被應用在工控、家電、醫療器械等領域。

它的主要特點包括:
?1. 采用IIC總線通信:IIC接口的4x4電容矩陣鍵盤模塊通過IIC總線通信連接到MCU,簡化了連接方式,方便使用。 ?2. 采用電容式按鍵設計:每個按鍵上放置一個電容器,當手指觸摸到按鍵時,電容器的電容值發生變化,通過檢測電容的變化實現按鍵檢測。 ?3. 4x4矩陣排列式設計:4x4電容矩陣鍵盤模塊采用矩陣排列式設計,一共有16個按鍵,可以滿足較為復雜的應用場景。 ?4. 接口簡單:IIC接口的4x4電容矩陣鍵盤模塊只需要SCL和SDA兩條線連接到MCU即可。 ?5. 高靈敏度:電容式按鍵設計使得按鍵檢測更加靈敏,而且不會產生按鍵輕微彈起的誤觸情況,使用更加舒適。 ?6. 代碼簡潔:使用該模塊并不需要編寫復雜的按鍵掃描程序,只需要通過讀取IIC總線上的按鍵值即可。
IIC接口的4x4電容矩陣鍵盤模塊是一種方便易用、高靈敏度的按鍵模塊,通過電容式按鍵設計實現按鍵的檢測和響應,并且通過IIC總線通信簡化了連接方式。它適合于應用于許多領域,如工控、家電和醫療器械等,能夠為使用者的產品帶來更為方便和高效的控制方式。
三、核心代碼
3.1 SG90舵機控制代碼
下面是基于GPIO模擬時序控制STM32F103C8T6驅動SG90舵機旋轉指定的角度的代碼,并封裝成子函數調用。
?
#include "stm32f10x.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
#include "delay.h"
?
#define Servo_pin GPIO_Pin_5
#define Servo_port GPIOA
?
void SG90_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
?
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = Servo_pin;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(Servo_port, &GPIO_InitStructure);
}
?
void SG90_SetAngle(uint8_t angle)
{
if(angle>180) angle=180;
if(angle<0) angle = 0;
?
uint8_t temp = angle/2 + 15;
?
for(int i=0;i<5;i++)
{
GPIO_SetBits(Servo_port, Servo_pin);
delay_us(temp);
GPIO_ResetBits(Servo_port, Servo_pin);
delay_us(20000-temp);
}
}
?
int main(void)
{
SystemInit();
?
delay_init();
?
SG90_Init();
?
while(1)
{
for(int i=0;i<=180;i+=10)
{
SG90_SetAngle(i);
delay_ms(500);
}
}
}
?
其中,SG90_Init()函數用于初始化PA5口,并將其配置為輸出模式。SG90_SetAngle()函數用于驅動舵機旋轉到指定角度。在該函數中,首先根據所給的角度值計算出延時的時間temp(單位為微秒),然后使用GPIO口控制SG90舵機在temp延時時間內輸出高電平,其余時間輸出低電平。通過調整延時時間和按角度分配脈沖寬度,達到驅動SG90舵機旋轉的目的。
main()函數中的for循環控制舵機從0度到180度的循環旋轉。代碼中用到了delay_init()函數和delay_ms()、delay_us()函數。它們是自行編寫的延時函數,可以實現毫秒和微秒級別的延時,具體代碼如下:
?
#include "stm32f10x.h"
?
void delay_init(void)
{
if (SysTick_Config(SystemCoreClock / 1000000)){
while(1);
}
}
?
static __IO uint32_t delay_us_tick;
void delay_us(uint32_t nUs)
{
delay_us_tick = nUs;
while (delay_us_tick);
}
?
static __IO uint32_t delay_ms_tick;
void delay_ms(uint32_t nMs)
{
delay_ms_tick = nMs;
while (delay_ms_tick);
}
?
void SysTick_Handler(void)
{
if (delay_us_tick > 0){
delay_us_tick--;
}
?
if (delay_ms_tick > 0){
delay_ms_tick--;
}
}
?
其中,delay_init()函數用于配置系統時鐘源和SysTick定時器,實現每個SysTick時鐘產生一個中斷的功能。delay_us()函數和delay_ms()函數分別用于實現微秒級別和毫秒級別的延時,通過限制delay_us_tick和delay_ms_tick的值實現延時的效果。SysTick_Handler()為中斷處理函數,每次SysTick定時器計數減1,當減到0時,相應的delay_us_tick或delay_ms_tick也減1,通過循環等待該值為0實現延時。
在代碼中的SG90_SetAngle()函數中,需要精確控制GPIO的電平時間,使其產生相應的脈沖寬度,從而控制舵機轉動角度。因此,需要配置GPIO口的輸出模式和速度、設定delay_us()函數中根據角度計算的電平時間,使得舵機能夠準確地執行旋轉。
3.2 RC522讀寫代碼
下面是基于SPI接口控制STM32F103C8T6驅動RFID-RC522模塊完成卡片識別和扇區讀寫的代碼示例。在該代碼中,使用的是SPI1的接口,RFID-RC522模塊通過SPI1接口連接到STM32F103C8T6。
代碼中通過封裝SPI相關操作和MFRC522庫函數,實現了讀取卡片信息和完成扇區讀寫的功能。
?
#include "stm32f10x.h"
#include "stm32f10x_spi.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
#include "delay.h"
#include "mfrc522.h"
#include "stdio.h"
#define SPI_CE_LOW() GPIO_ResetBits(GPIOA,GPIO_Pin_4)
#define SPI_CE_HIGH() GPIO_SetBits(GPIOA,GPIO_Pin_4)
void SPI1_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
SPI_InitTypeDef SPI_InitStructure;
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_2;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI1, &SPI_InitStructure);
SPI_Cmd(SPI1, ENABLE);
}
uint8_t SPI1_SendByte(uint8_t byte)
{
while(SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET);
SPI_I2S_SendData(SPI1, byte);
while(SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) ==
RESET); return SPI_I2S_ReceiveData(SPI1); }
void MFRC522_Reset(void) { SPI_CE_LOW(); SPI1_SendByte(0x1B); SPI_CE_HIGH(); }
uint8_t MFRC522_ReadRegister(uint8_t addr) { SPI_CE_LOW(); uint8_t data; SPI1_SendByte(0x80 | addr); data = SPI1_SendByte(0x00); SPI_CE_HIGH(); return data; }
void MFRC522_WriteRegister(uint8_t addr, uint8_t val) { SPI_CE_LOW(); SPI1_SendByte(0x7F & addr); SPI1_SendByte(val); SPI_CE_HIGH(); }
void MFRC522_ReadRegisters(uint8_t addr, uint8_t count, uint8_t *values) { SPI_CE_LOW(); SPI1_SendByte(0x80 | addr); for(uint8_t i=0;i
?
測試。。。
詳細流程:
1. 創建 RtcEngine 對象
該對象管理了整個的視頻等場景,是一個非常核心的對象。
?
try {
RtcEngineConfig config = new RtcEngineConfig();
config.mContext = getBaseContext();
config.mAppId = appId;
config.mEventHandler = mRtcEventHandler;
config.mAudioScenario = Constants.AudioScenario.getValue(Constants.AudioScenario.DEFAULT);
mRtcEngine = RtcEngine.create(config);
} catch (Exception e) {
throw new RuntimeException("Check the error.");
}
?
2. 創建 RtcEngine 屬性
?
// 視頻默認禁用,你需要調用 enableVideo 啟用視頻流。
mRtcEngine.enableVideo();
// 錄音默認禁用,你需要調用 enableAudio 啟用錄音。
mRtcEngine.enableAudio();
// 開啟本地視頻預覽。
mRtcEngine.startPreview();
?
3. 將本地攝像頭內容顯示到 local_video_view_container 上
?
FrameLayout container = findViewById(R.id.local_video_view_container); // 創建一個 SurfaceView 對象,并將其作為 FrameLayout 的子對象。 SurfaceView surfaceView = new SurfaceView (getBaseContext()); container.addView(surfaceView); // 將 SurfaceView 對象傳入聲網,以渲染本地視頻。 mRtcEngine.setupLocalVideo(new VideoCanvas(surfaceView, VideoCanvas.RENDER_MODE_FIT, KeyCenter.RTC_UID));
?
4. 設置當前的模式
?
ChannelMediaOptions options = new ChannelMediaOptions();
// 將用戶角色設置為 BROADCASTER。
options.clientRoleType = Constants.CLIENT_ROLE_BROADCASTER;
// 視頻通話場景下,設置頻道場景為 BROADCASTING。
options.channelProfile = Constants.CHANNEL_PROFILE_LIVE_BROADCASTING;
?
其中 clientRoleType 有兩種,如果是 CLIENT_ROLE_BROADCASTER 就是可以播和收,如果是 CLIENT_ROLE_AUDIENCE 就只能收看,當前就成了主播模式。
5. 加入頻道
?
// 使用臨時 Token 加入頻道。
// 你需要自行指定用戶 ID,并確保其在頻道內的唯一性。
int res = mRtcEngine.joinChannel(token, channelName, KeyCenter.RTC_UID, options);
if (res != 0)
{
// Usually happens with invalid parameters
// Error code description can be found at:
// en: https://docs.agora.io/en/Voice/API%20Reference/java/classio_1_1agora_1_1rtc_1_1_i_rtc_engine_event_handler_1_1_error_code.html
// cn: https://docs.agora.io/cn/Voice/API%20Reference/java/classio_1_1agora_1_1rtc_1_1_i_rtc_engine_event_handler_1_1_error_code.html
Log.e("video","join err:"+RtcEngine.getErrorDescription(Math.abs(res)));
}
?
joinChannel 方法有返回值,可以看到我們加入頻道是否成功了,如果不成功的話,我們可以看下錯誤原因,并對照解決;如果成功了,就可以觀察 IRtcEngineEventHandler 對象的回調方法,重點關注下 onError (int err) 和 onJoinChannelSuccess (String channel, int uid, int elapsed) 如果收到 onJoinChannelSuccess 方法的回調,我們就可以關注 onUserJoined (int uid, int elapsed) 方法,我們可以在這個方法里開始顯示遠端內容。
6. 顯示遠端內容
?
@Override
// 監聽頻道內的遠端主播,獲取主播的 uid 信息。
public void onUserJoined(int uid, int elapsed) {
Log.e(TAG, "onUserJoined->" + uid);
runOnUiThread(new Runnable() {
@Override
public void run() {
// 從 onUserJoined 回調獲取 uid 后,調用 setupRemoteVideo,設置遠端視頻視圖。
setupRemoteVideo(uid);
}
});
}
private void setupRemoteVideo(int uid) {
FrameLayout container = findViewById(R.id.remote_video_view_container);
SurfaceView surfaceView = new SurfaceView (getBaseContext());
surfaceView.setZOrderMediaOverlay(true);
container.addView(surfaceView);
mRtcEngine.setupRemoteVideo(new VideoCanvas(surfaceView, VideoCanvas.RENDER_MODE_FIT, uid));
}
?
最終,遠端的視頻會顯示在 remote_video_view_container 上。
1、接口遺漏
通過精準平臺確認通過商家用戶 id 查詢退貨地址接口也存在對應的改動,開發少梳理了一個,并同步開發在清單中進行補充。
2、代碼分支合并
商家核心服務識別出了一個非地址相關的改動,跟開發確認之后發現是因為當前提測分支沒有合并當前線上最新的 master 分支,導致跑出了非地址相關的功能數據。告知開發進行對應代碼合并之后,QA 需要重新部署重新拉取接口再次確認。

3、接口重載
商家核心服務有一個重載方法精準平臺沒有識別出這個根據商家 id 查詢商家地址的接口,跟開發進行確認,最終結論是根據商家 id 查詢商家地址的 V2 接口是重載了以下接口:平臺沒有看到重載的方法名,最終確認重載方法還是原來的方法名,只是在入參上作區分,一個只有商家 ID,一個需要傳商家 ID、訂單類型、商品 ID。最終在精準平臺確認了對應的入參區別,平臺沒有作為兩個接口進行識別。
4、內部調用方法也被識別
在使用精準平臺進行新增接口拉取的時候,發現平臺會將一些私有方法識別出來,這些方法是內部調用,沒有注冊,接口測試平臺也看不到對應的接口信息,無法覆蓋。
3.6 最終接口確認
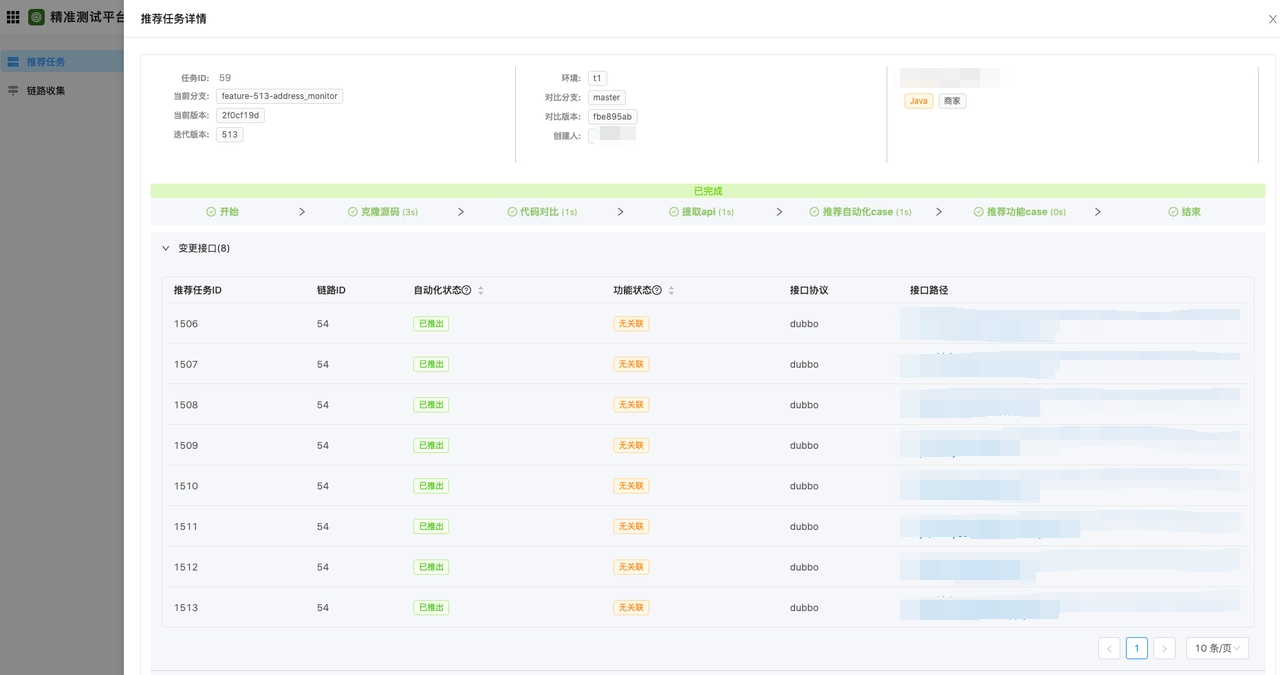
1、商家拆分服務
本次涉及 8 個改動接口,并補充缺少的 4 個接口的自動化之后,正常識別且狀態正常,說明此服務接口都正常覆蓋。

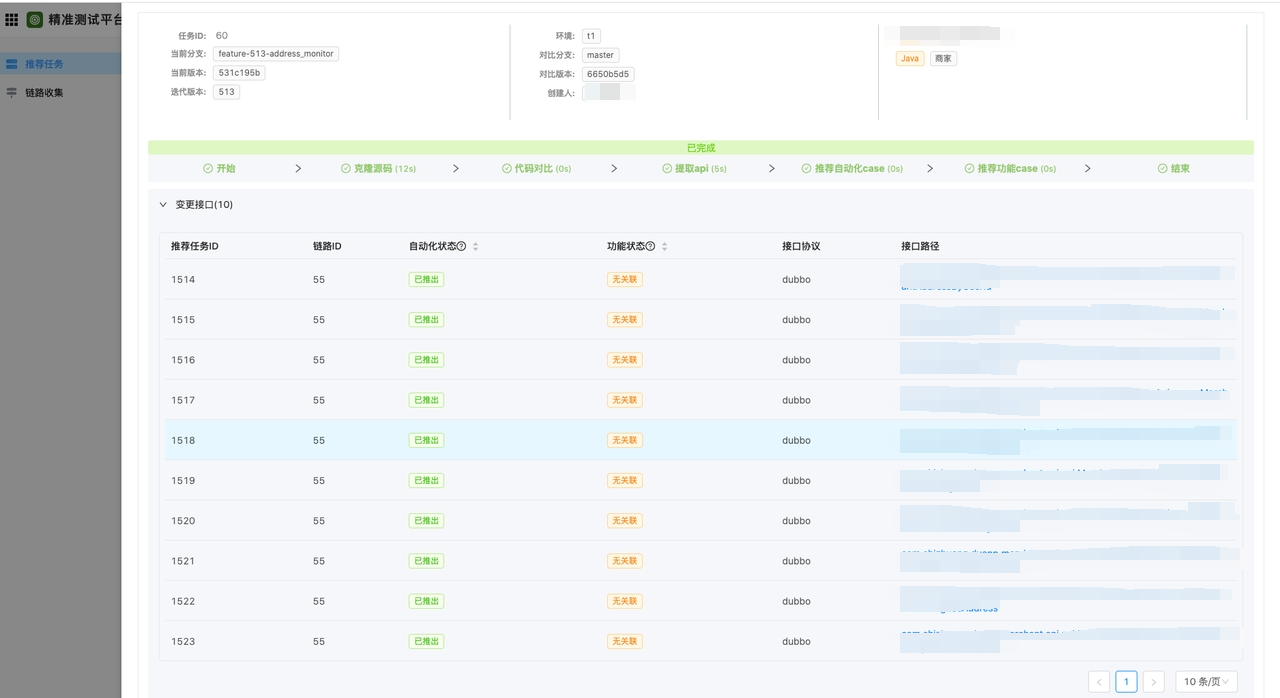
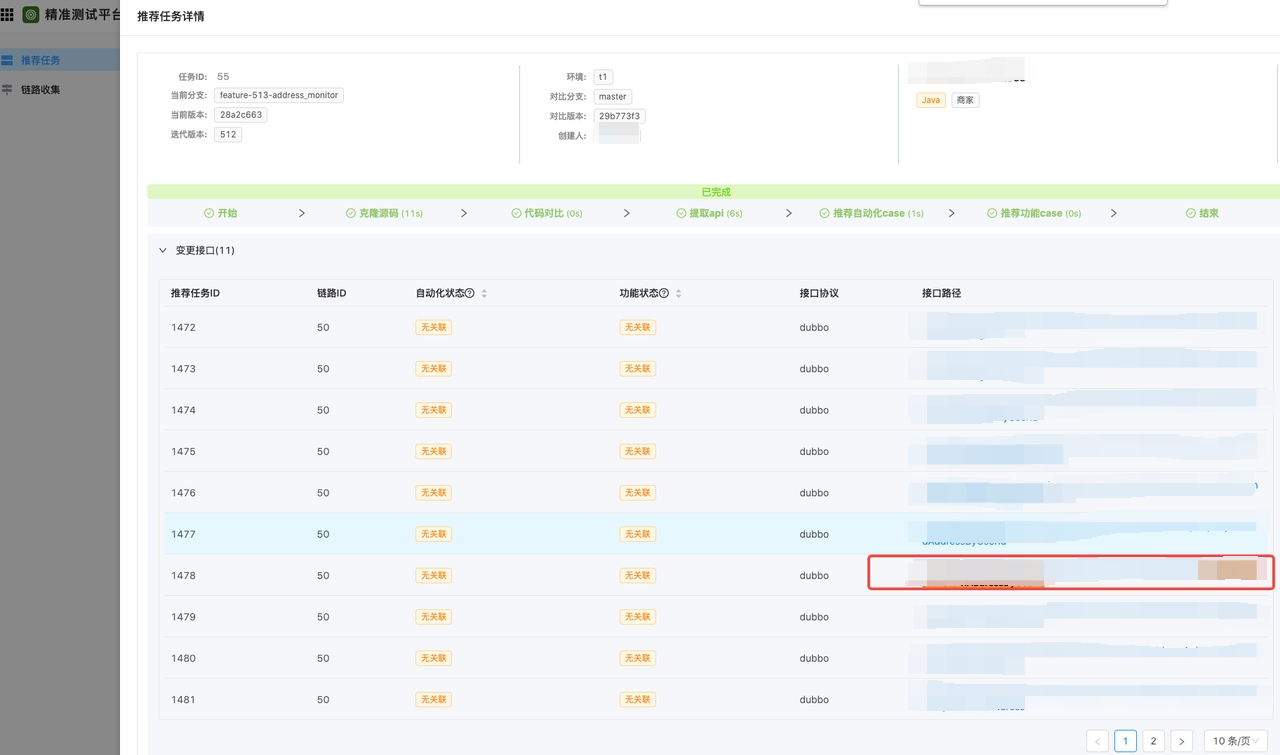
2、商家核心服務
本次涉及 10 個接口改動,并補充缺少的接口自動化之后,對應接口都能正常識別且狀態正常,說明此服務接口都正常覆蓋。

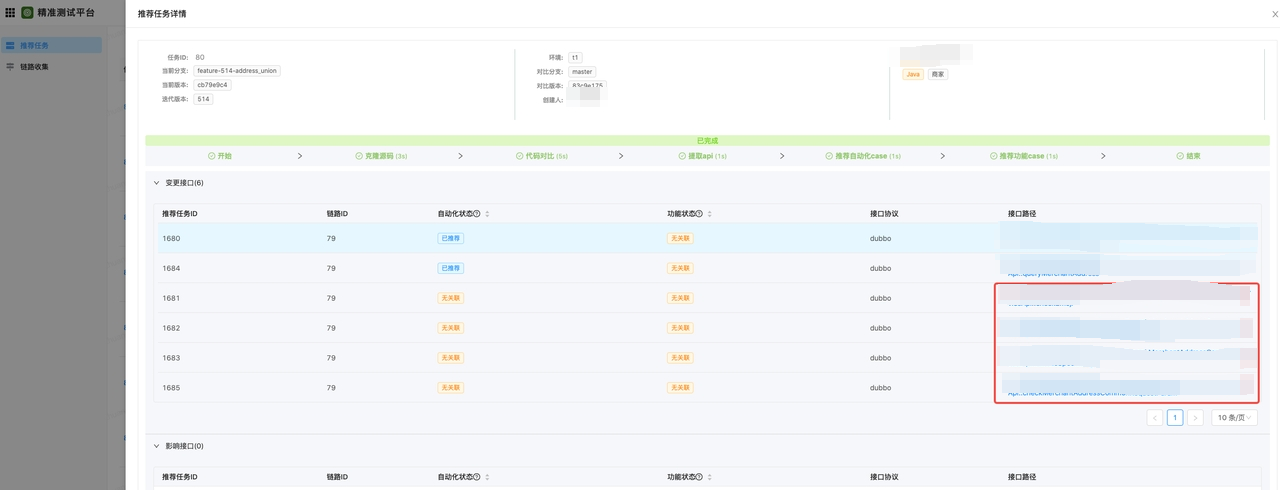
3、商家下單鏈路服務
本次涉及 4 個接口改動,并補充缺少的 2 個接口自動化之后,對應接口都能正常識別且狀態正常,說明此服務接口都正常覆蓋。


四、結果
4.1 各個服務觸發自動化結果
1、商家拆分服務

2、商家核心服務


3、商家下單鏈路服務

五、探索心得
5.1 總結
借助于精準測試平臺,發現一個開發梳理遺漏的接口,有效避免了梳理遺漏導致的測試遺漏,一定程度上規避了風險,是 QA 從經驗型的主觀判斷向精準的數據可視化轉變。
借助精準平臺識別出一些沒有進行自動化覆蓋的接口,讓 QA 能針對這些清單進行接口自動化的查缺補漏,從另一層面提升了自動化用例集的完整性。
精準平臺與自動化平臺、測試用例平臺、覆蓋率平臺打通,從正向追溯和逆向追溯兩個核心進行測試,確保數據的準確性、完整性,方便 QA 持續跟蹤,提高測試效率。
5.2 優化
在接入精準測試平臺的過程中,對平臺有了進一步的了解,當然在使用的過程中也發現一些問題,并給開發提了相關建議,從而不斷完善精準測試平臺開發,也幫助 QA 更好更高效得完成質量保障工作。










 工商網監
工商網監
評論