 電子發燒友App
電子發燒友App


(《指揮與控制學報》刊文精選)
引用格式:吳小太, 余金其, 唐漾, 張振華. 干擾攻擊下基于隨機通信的多智能體系統一致性分析[J]. 指揮與控制學報, 2023, 9(6): 726-733.
WU Xiaotai, YU Jinqi, TANG Yang, ZHANG Zhenhua. Concensus Analysis of Multi-agent Systems Based on Random Communication under Jamming Attack[J]. Journal of Command and Control, 2023, 9(6): 726-733.
摘要
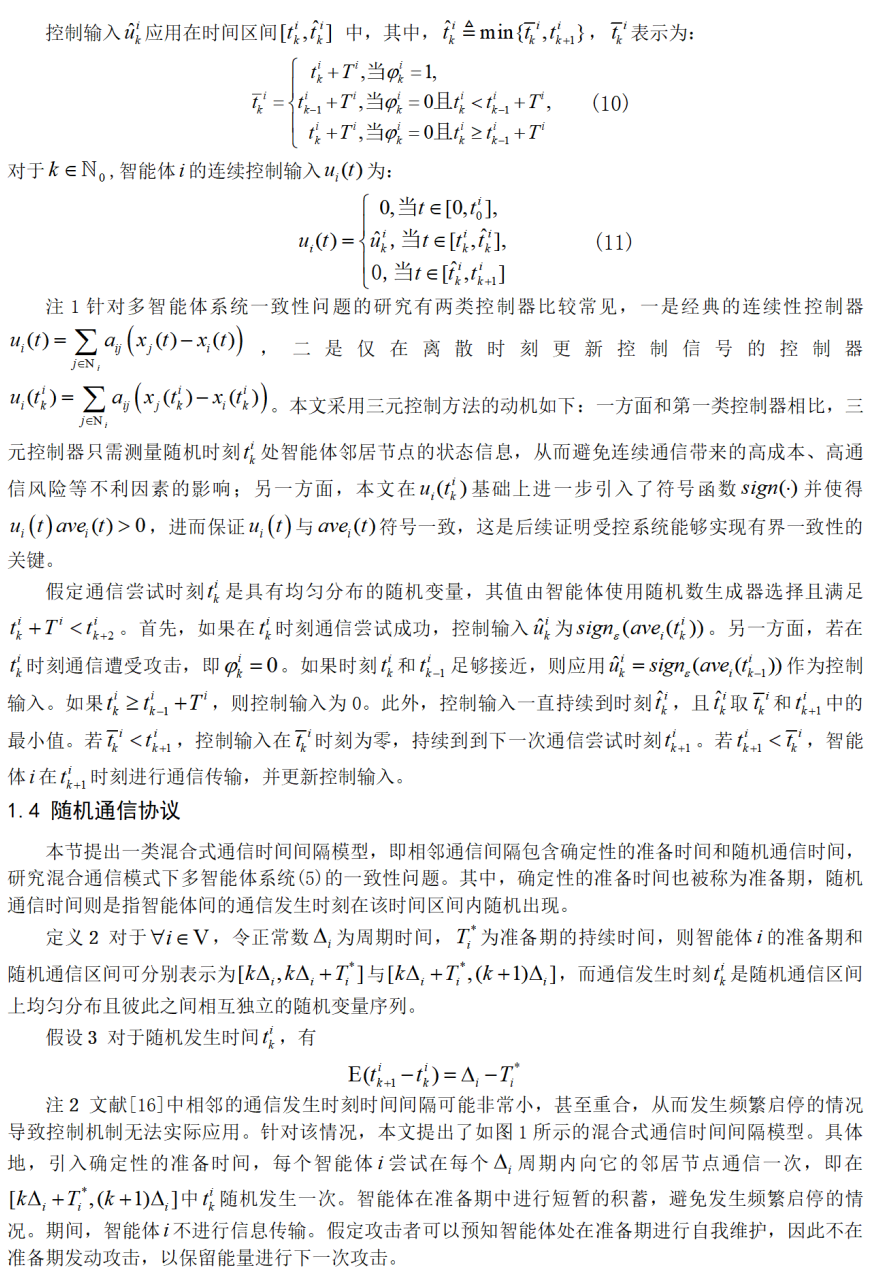
實際應用中,多智能體系統可能在一定時間段內受到惡意攻擊者持續或間歇性的攻擊,導致智能體間的通信信道被阻斷。針對這一現象,假定智能體間的通信發生時間具有隨機性,即通信時間間隔由確定性準備時間與隨機通信時間段共同組成,以降低信息在通信過程中被惡意攻擊的風險。通過采用三元控制方法和隨機分析技巧,得到了干擾攻擊下多智能體系統一致的充分條件。通過實例數值仿真驗證了所得結果的有效性。
隨著未來戰爭向信息化與網絡化對抗方向迅猛發展,以多智能體系統協同控制為代表的群體智能技術正在向軍事領域全面滲透[1],并在無人機蜂群戰術[2]、多導彈協同作戰[3]、協同偵察系統等方向得到廣泛應用。具體地,集群系統通過網絡和通信技術來實現智能體與其鄰居節點之間的信息傳遞與協同工作[4,5], 進而完成復雜的軍事任務。
在網絡技術應用于集群智能的同時,系統的指揮與控制模塊及信息傳輸途徑還面臨著來自于外界的惡意攻擊風險[6]。當系統遭受網絡攻擊時,合法操作員可能無法指揮與控制目標系統,導致控制命令傳輸失敗,使得多智能體系統的一致性無法得到保證、集群戰術目標無法完成。因而,確保被控系統的網絡通信安全已經成為一項重要挑戰。
網絡控制系統可能會受到不同類型的網絡攻擊威脅[10-12],主要包括拒絕服務(denial of service, DoS)攻擊[7]、欺騙攻擊[8]、干擾攻擊[9]等。文獻[10]研究了一類對抗性攻擊下網絡物理系統的安全評估與控制問題,且控制信號在被發送到執行器的過程中可被攻擊者惡意篡改。文獻[11]指出,攻擊者可以在不被系統監測到的情況下將特定的虛假數據注入系統。由文獻[12]可知,自身能量有限的攻擊者還可以利用DoS攻擊來阻斷通信網絡的信息傳輸。因此,研究網絡攻擊背景下多智能體系統的協同控制特別是一致性問題具有重要意義。
近年來,在假設網絡攻擊服從伯努利(Bernolli)分布[13-14]或馬爾可夫鏈(Markov Chain)[15]等隨機分布的基礎上,針對隨機網絡攻擊下多智能體系統一致性問題的研究已經取得豐碩成果。文獻[13]主要研究了DoS攻擊導致的網絡丟包現象對系統控制性能的影響,設計了最大化平均期望估計誤差的最優攻擊調度方案,以及最大化丟包網絡上的期望終端估計誤差的最優攻擊調度方案。文獻[14]設計了一類智能攻擊者,通過隨機向網絡中的某些通信信道注入DoS攻擊使得相應的被攻擊通信鏈路斷開,最終破壞目標系統的一致性狀態。文獻[15]則考慮了馬爾可夫調制DoS攻擊下的風險敏感隨機控制問題,其中攻擊者使用隱馬爾可夫模型隨機阻塞系統中的控制數據包。
然而,上述文獻通常從攻擊者角度研究如何設計攻擊手段以提高其攻擊效率,而從被攻擊者角度研究系統在被攻擊時如何正常運行的文獻則相對較少。當系統面臨可能的外部攻擊時,設計一種有效且易于實現的控制機制使得被攻擊系統仍能維持正常工作具有重要價值。對此,文獻[16]提出了一類與觸發機制相結合的隨機通信協議以降低干擾攻擊對多智能體系統一致性的不利影響。
基于通過智能體之間隨機通信或采樣來生成三種控制信號的三元控制方法[17],分別研究了攻擊者干擾攻擊發生和持續時間與隨機通信時間無關和相關兩種情形下的多智能體系統的一致性問題。該文提出的隨機通信協議可以在概率意義上確保系統在有限時間內實現有界一致性。然而,文獻[16]僅假定隨機通信序列服從均勻分布,這可能導致相鄰通信間隔過于接近甚至重合的不合理現象,從而限制了相關研究結果的實際應用范圍。
本文將考慮干擾攻擊下一類基于隨機通信協議的多智能體系統一致性問題。通過三元控制方法和隨機分析技巧,獲得了干擾攻擊下基于隨機通信的多智能體系統實現一致性需滿足的充分條件。不同于文獻[16],假定智能體間的通信發生時間具有隨機性,即通信時間間隔由確定性的準備時間與隨機時間間隔共同組成,從而進一步降低信息在通信過程中被惡意攻擊的風險。
值得指出的是,本文引入的確定性與隨機時間共同組成的混合時間間隔可以有效避免文獻[16]中通信發生時間間隔過小,甚至重合的不足,有效拓廣了文獻[16]中相關結論的適用范圍。相比于文獻[17-18]等采用的確定性通信策略,本文設置的通信機制使得采樣時刻具有隨機性,可在一定程度上避免攻擊者對被控系統具體采樣規律的偵測和預判。另一方面,相比于受控系統的狀態軌跡在時間無窮大尺度上的漸近或指數收斂[19],本文基于三元控制方法可以確保多智能體系統在有限時間內實現一致性。
?
?
?
?
?
?

?
?
References
[1] 田磊, 王曉東, 董希旺, 等. 基于時變編隊控制的有人-無人集群協同飛行策略 [J]. 指揮與控制學報, 2022, 8(1): 57-63.
TIAN L, WANG X D, DONG X W, et al. Cooperative?flight strategy for manned and unmanned swarm systems based on time-varying formation control[J].?Journal of Command and Control,?2022, 8(1): 57-63.
[2] 溫廣輝, 周佳玲, 呂躍祖, 等. 多導彈協同作戰中的分布式協調控制問題[J]. 指揮與控制學報, 2021, 7(2):137-145.
WEN G H, ZHOU J L, LYU Y Z, et al. Distributed coordinated control in multi-missile cooperative tasks[J]. Journal of Command and Control,2021, 7(2): 137-145.
[3]?谷海波, 劉克新, 呂金虎. 集群系統協同控制:機遇與挑戰 [J]. 指揮與控制學報, 2021, 7(1): 1-10.
GU H B, LIU K X, LYU J H. Cooperative control of swarm systems: opportunities and challenges[J]. Journal of Command and Control, 2021, 7(01): 1-10.
[4]?SABER R O, FAX J A, MURRAY R M. Consensus and cooperation in networked multi-agent systems[J]. Proceedings of the IEEE, 2007, 95(1): 215-233.
[5]?REN W. Distributed cooperative attitude synchronization and tracking for multiple rigid bodies[J]. IEEE Transactions on Control System Technology, 2010, 18(2): 383-392.
[6]?FENG Z, WEN G, HU G. Distributed secure coordinated control for multiagent systems under strategic attacks[J]. IEEE Transactions on Cybernetics, 2017, 47(5): 1273-1284.
[7]?FENG S, TESI P. Resilient control under Denial-of-Service: Robust design[J]. Automatica, 2017, 79:42-51.
[8] 王譽達, 查利娟, 劉金良, 等. 基于事件觸發和欺騙攻擊的多智能體一致性控制 [J]. 南京信息工程大學學報(自然科學版), 2019, 11(4):380-389.
WANG Y D, ZHA L J, LIU J L, et al. Event-based consensus of multi-agent systems with deception attacks[J]. Journal of Nanjing University of Information Science and Technology(Natural Science Edition), 2019, 11(4):380-389.
[9]?SENEJOHNNY D, TESI P, PERSIS C D. A jamming-resilient algorithm for self-triggered network coordination[J]. IEEE Transactions on Control of Network Systems, 2018, 5(3): 981-990.
[10]?HAMZA F, PAULO T, SUHAS N, DIGGAVI. Secure estimation and control for cyber-physical systems under adversarial attacks[J]. IEEE Transactions on Automatic Control, 2014, 59(6):1454-1467.
[11]?ZUO Z, CAO X, WANG Y, ZhANG W. Resilient consensus of multiagent systems against Denial-of-Service attacks[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(4): 2664-2675.
[12]?AWERBUCH B, CURTMOLA R, HOLMER D, et al. ODSBR: An on-demand secure byzantine resilient routing protocol for wireless Ad Hoc networks[J]. ACM Transaction on Information and System Security, 2007, 10(4):161-195.
[13]?QIN J H, Li M L, SHI L, Yu X H. Optimal Denial-of-Service attack scheduling with energy constraint over packet-dropping networks[J]. IEEE Transactions on Automatic Control, 2018,63(6):1648-1663.
[14]?SUN L, ZHANG Y , SUN C. Stochastic Denial-of-Service attack allocation in leader-following multiagent systems[J]. ?IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(5):2848-2857.
[15]?BEFEKADU G K, GUPTA V, ANTSAKLIS P J. Risk-sensitive control under Markov modulated Denial-of-Service (DoS) attack strategies[J]. IEEE Transactions on Automatic Control, 2015, 60(12):3299-3304.
[16]?AHMET C, KAITO K, TOMOHISA H, HIDEAKI I. Randomized transmission protocols for protection against jamming attacks in multi-agent consensus[J]. Automatica, 2020, 117:108960.
[17]?PERSIS C D, FRASCA P. Robust self-triggered coordination with ternary controllers[J]. IEEE Transactions on Automatic Control, 2013, 58(12):3024-3038.
[18]?SENEJOHNNY D, PERSIS C D,?TESI?P. A jamming-resilient algorithm for self-triggered network coordination[J]. IEEE Transactions on control of network systems, 2018, 5(3): 981-990.
[19]?ZHANG ?H, ?FENG ?G, ?YAN ?H. ?Consensus ?of ?multi-agent ?systems ?with ?linear ?dynamics ?using
Event-triggered control[J]. IET Control Theory & Applications, 2014, 8(18): 2275-2281.
[20] 王利, 王普, 閆崢. 無人機通信網絡安全綜述[J]. 網絡空間安全, 2019, 10(9): 13-19.
WANG L, WANG P, YAN Z. A survey on secure communication of unmanned aerial vehicles[J]. Cyberspace Security, 2019, 10(9): 13-19.
作者簡介
吳小太 (1982—) , 男, 博士, 教授, 主要研究方向為隨機混雜系統的穩定性分析、穩定化控制和多智能體網絡應用. 本文通信作者.
余金其 (1998—) , 男, 碩士研究生, 主要研究方向為多智能體系統的應用.
唐 漾 (1982—) , 男, 博士, 教授, 主要研究方向為自主群體智能系統感知、控制和決策、機器視覺和深度學習.
張振華 (1991—) , 男, 博士, 講師, 主要研究方向為多智能體系統和脈沖一致性.
審核編輯:黃飛
?












 工商網監
工商網監
評論