 電子發燒友App
電子發燒友App


該項目描述了如何設計能夠測量低至千分之三度的角度的定制傾斜計子系統。
這是我們在 AAC 上設計的項目和子系統之一,旨在嘗試向您展示新的思想、想法和技術。
該項目創建了一個可用于精密儀器的測斜儀子系統。通過這種設計,我可以記錄低至百分之一度的角度,并且知道它是準確的。我可以將其到千分之一度,并以 99.999999% 的置信度知道它與實際傾斜值的千分之三度之內。
項目的終構建
該項目創建了一個用于科學儀器或機械的單軸數字機械傾斜儀。該電路板采用了來自不同制造商的 IC,并演示了您可以將其納入設計中的幾種不同技術。
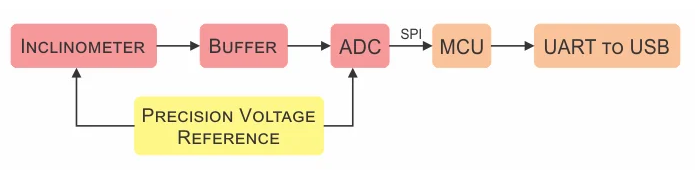
一個非常簡單的項目框圖
本文是系列文章中的篇,介紹了使用 muRata SCA103T-D04(一款基于 ±15° MEMS 的傾斜計 IC)創建精密傾斜計電路所需的一些機械和電氣注意事項。未來的文章將更詳細地介紹原理圖設計、PCB 布局注意事項以及器件操作分析。
1. 選擇組件
以下是復制我的設計所需的主要組件的簡化 BOM:
SCA103T-D04 ±15°傾角儀
LTC2380IDE SAR ADC
LT1027LS8 精密電壓基準
設計如何運作?
該設計以SCA103T-D04 ±15° 傾斜計 IC為中心 。出于披露的目的,讓我提一下,為了本文的目的,muRata 向我發送了這個傾斜儀。遺憾的是,我得知(為時已晚)該特定組件將被停產。muRata 網站目前聲明 SCA103T-D04 的“購買日期”是 2019 年 6 月 15 日。
傾斜計的傳感器輸出通過 Analog Devices AD8244單位增益放大器發送至 Linear Technology(現屬于 Analog Devices)的LTC2380IDE 逐次逼近寄存器 (SAR) 模數轉換器( ADC)。我選擇了 24 位 SAR ADC 而不是 16 位器件,因為我深知它在物理上和實際上不可能解析到 0.00000001°。我將目標設為 17-18 位,即 0.0001°。這是一個有點昂貴的選擇,因此如果有人想稍后使用 16 位 ADC 重新創建此設計,您會很高興知道我選擇了具有可用引腳兼容的 16 位版本。
然而,我只會制作其中一塊板,所以我寧愿擁有比我懷疑我能夠使用的更多的分辨率,也不愿擁有太少的分辨率。此外,我選擇的 ADC 具有集成的數字平均濾波器,因此應該可以通過重復測量從測斜儀中統計出超過 16 位的分辨率。
ADC 值由 TI MSP430 微控制器讀取。TI 的MSP430微控制器是我在過去幾個項目中選擇的 MCU。我本可以選擇MSP430FR2433來訪問額外的 GPIO 線,但該項目不需要其他引腳。MSP430FR2633具有電容式觸摸引腳功能,允許在未來的控制板上實現外部校準按鈕。
然后該值被傳遞到 Silicon Labs CP2102N UART 至 USB 轉換器。
關于傾角儀
muRata SCA103T-D04 ±15°模擬高性能差分1軸傾角儀的模擬分辨率為0.001°(16位),輸出噪聲密度為0.0004°/√Hz,偏移溫度依賴性為±0.002°/° C。
集成的 11 位 ADC 通過 SPI 引腳提供直接數字轉換輸出。每個內部傳感元件提供 0.5-4.5VDC 范圍內的單端輸出,并保留 0-0.5VDC 和 4.5-5.0VDC 來指示錯誤情況。
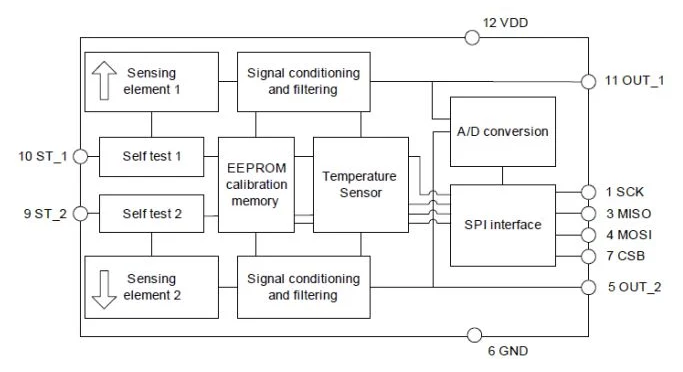
數據表中的 SCA103T-D04 功能框圖
IC 內部有兩個相同的加速度計,沿同一軸排列并指向相反的方向。輸出旨在為差分放大器或差分輸入 ADC 供電。這種差分測量技術有助于降低噪聲并消除共模測量誤差。
muRata 的數據表指出,該設備能夠以 0.001° 的分辨率識別角位移,相當于約 14 位。低溫依賴性(可校正)和低噪聲密度(不可校正),以及 muRata 在設備的整個工作范圍內發布差規格的政策,使我相信性能可能比在某些情況下指定的要好。
作為“艱難休斯”,如果可能的話,我想突破上限。
2、方案設計
成功項目的步是創建功能原理圖設計。這涉及研究所涉及 IC 的引腳排列并進行適當的連接。
我逐個組件地接觸我的董事會。
傾斜計:由于 SCA103T-D04 的自檢功能的設置方式,我在 BOM 中添加了另一個 IC,以防止兩個引腳同時處于活動狀態。
信號緩沖器和模數轉換器:我需要考慮如何通過各種濾波器和放大器路由信號以確保信號完整性。
微控制器:為 MSP430 分配引腳將在固件寫入階段進行。
您可以在有關如何設計功能原理圖的文章中閱讀這部分設計過程的更詳細說明。
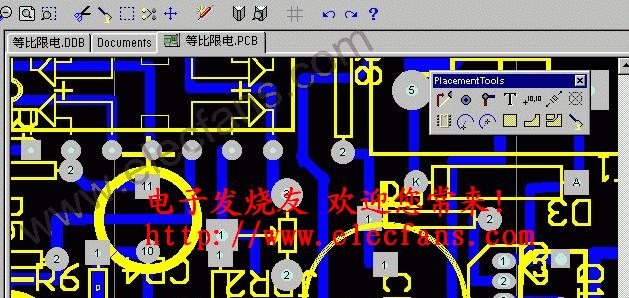
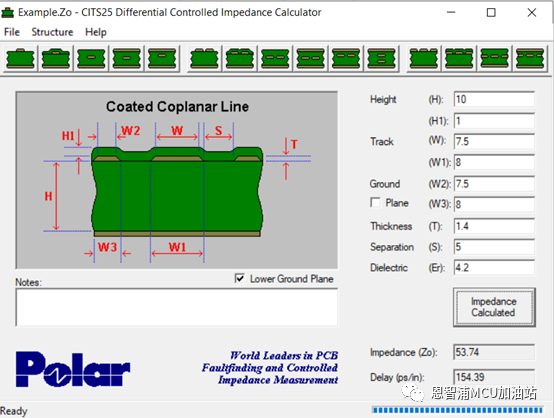
3. PCB 布局
將原理圖轉變為電路板布局時需要考慮多種因素。在這種情況下,我特別需要確保電壓參考 IC 的機械隔離和熱隔離。我還決定采用保護環以限度地減少泄漏電流。
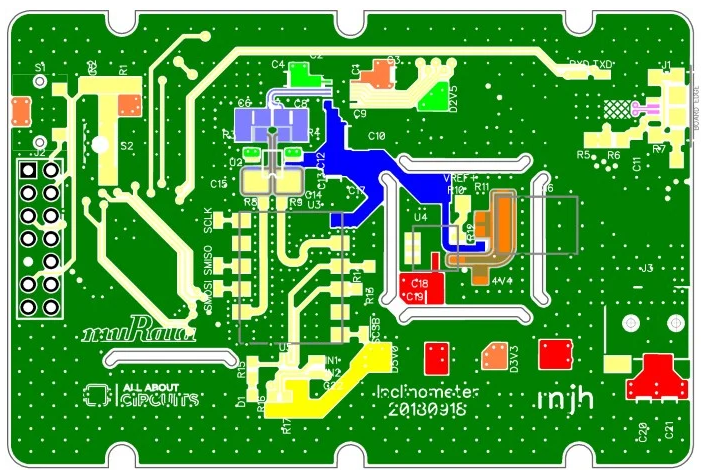
板的頂層
確定組件的布局、走線的長度和路徑以及噪聲排除設計對于該設計都很重要。
我創建了一個 4 層板,其中兩層外層用于組件和信號,一層用于接地,一層用于混合電源。
板層按順序排列
可能產生大量熱量的組件(LDO、MCU)被放置在板的底部,組件的頂部可以機械連接到鋁制 PCB 載體上的突出部分。其想法是在 IC 產生的過多熱量有機會擴散到 PCB 的其他部分之前通過金屬將其消散。
我在另一篇文章中詳細介紹了設計該 PCB 時的具體考慮因素。如果您想了解有關此過程的更多信息,包括我的電路板切口如何用于隔離電路板內部免受熱和應力損壞,請閱讀有關我如何將原理圖轉換為 PCB 布局的信息。
4. 燒寫固件
對定制板進行編程的步是考慮哪些引腳連接到哪些設備。
為了給自己提供盡可能多的信息,我在代碼中添加了 ASCII 連接圖。此步驟不是必需的,但我發現將圖表作為源代碼中的參考很有幫助。
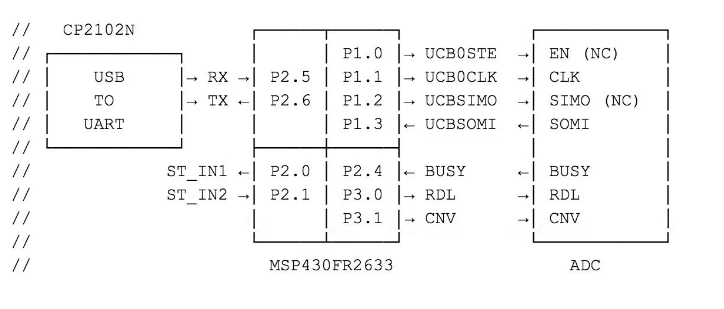
我在代碼中包含的引腳分配表示以供參考
將我們的注意力轉向 MSP430,在配置之前您無法使用微控制器執行任何操作。為此,您必須確定引腳、時鐘源、電源模式等。這就是使用高質量評估套件值得您投入的每一分鐘和每一美元的地方。就我而言,我之前有足夠的 MSP430 經驗,使程序接近正確,并且論壇貢獻者的一些幫助使我能夠快速完成任務。
除了引腳分配等之外,考慮到該子系統能夠收集多少數據,我還需要考慮如何管理數據。為了實現這一目標,我選擇以二進制值的形式查看串行監視器中的數據,以便快速評估我的設備是否遇到噪音。
如果您想了解有關此主題的更多信息,包括寄存器是什么以及如何使用它們等信息,請查看我關于MSP430 固件設計的文章。
5. 機械考慮:設計外殼
0.001° 的分辨率意味著 PCB 一側的高度改變約 1 ?m(接觸點之間的距離約為 9.5 cm)。這是一個非常小的位移,基本上保證了每次調整板固定器內的板后都必須執行數字校準。
我沒有在板支架內調整板,而是選擇將板牢固地固定到板支架上并調整支架。
如果我選擇按照數據表的建議使用簡單的數字校準,我可能會失去辦公室里“Hard-way Hughes”的綽號。由于我的“街頭信譽”受到威脅,我選擇通過安裝在板一端的差動驅動螺桿機構將機械調節納入板支架中,并在板的另一端安裝兩個額外的 M3 拋光蓋形螺母。董事會持有人。
您可以在以后的文章中看到我對設計外殼的機械考慮因素的完整分解。
6. 開始生產
請記住,AAC 板用于教育目的,因此我們通常只對每個板進行旋轉。您對制造要求和原型訂單的體驗會有所不同。
您可以在下面我的設計文件:
測斜儀_201809131600.zip
7. 表征器件
現在我們的傾角計已經完成制造,我們可以開始表征我們的設備。
我們閃亮的新板(顯示在其板架中)
噪音
我關心的電路部分是電壓參考,所以這是我首先關注的測量。這是如果我重新制作 PCB 的話我會重新設計的電路部分。我將電路板連接到示波器并開始測試。
在測試過程中,我發現了一個“問題”——重復的異常現象。
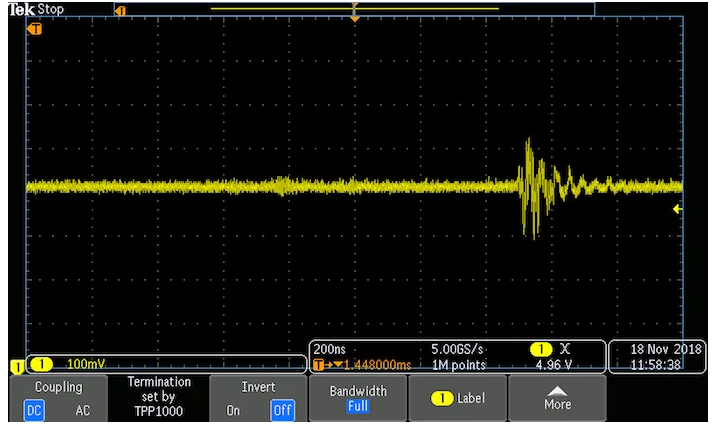
示波器捕獲顯示有問題的偷偷摸摸的“打嗝”
如果該板用于大規模生產,這肯定是我需要解決的一個問題,特別是因為我目前無法判斷噪音是良性的還是表明存在更嚴重的情況。然而,這種特殊的噪聲事件似乎并未對設備的性能產生負面影響。
這是一個很好的例子,說明設計的下迭代將包括更多測試點,包括同軸測試連接,以實現更完整的測試和測量。
有關我如何創建測試環境以及噪聲密度如何影響組件選擇的更多信息,請查看我以后關于該主題的文章。
8. 數據分析
總而言之,我需要一種方法來查看和分析傾角儀收集的數據。我在固件部分提到了這一點,但下一步是處理數據。我選擇使用 Mathematica 來創建此設置:
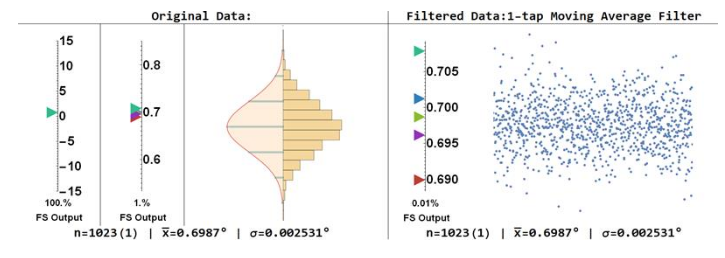
然后我進行了試驗以確定我是否可以解釋和表示數據集。
如果您熱衷于統計和數據建模,您可以在我即將發表的文章中詳細了解我在數據分析方面的冒險經歷,我在其中描述了這些試驗。















 工商網監
工商網監
評論