 電子發燒友App
電子發燒友App


1 基本理論
開關電源的輸出電壓Vo是由一個控制電壓Vc來控制的,即由Vc與鋸齒波信號比較,產生PWM波形。根據鋸齒波產生的方式不同,開關電源的控制方式可分為電壓型控制和電流型控制。電壓型的鋸齒波是由芯片內部產生的,如LM5025,電流型的鋸齒波是輸出電感的電流轉化成電壓波形得到的,如UC3843。對于反激電路,變壓器原邊繞組的電流就是產生鋸齒波的依據。 信息來自:輸配電設備網
輸出電壓Vo與控制電壓Vc的比值稱為未補償的開環傳遞函數Tu,Tu=Vo/Vc。一般按頻率的變化來反映Tu的變化,即Bode圖。 信息來自:輸配電設備網
電壓型控制的電源其Tu是雙極點,以非隔離的BUCK為例,形式為: 
信息來源:http://tede.cn
電流型控制的電源其Tu是單極點,以非隔離的BUCK為例,形式為: ![]()
信息請登陸:輸配電設備網
各種電路的未補償的開環傳遞函數Tu可以從資料中找到。本講座的目的是提供一種直觀的環路設計手段。
信息來自:輸配電設備網
2 計算機仿真開關電源未補償的開環傳遞函數Tu 信息來自:輸配電設備網
2.1 開關平均模型
開關電源的各個量經平均處理后,去掉高頻開關分量,得到低頻(包括直流)的分量。開關電源的建模、靜態工作點、反饋設計、動態分析等都是基于平均模型基礎之上的。若要得到實際的工作波形,應按實際電路進行時域仿真(Time Transient Analysis)。
信息來自:輸配電設備網
將開關電路中的開關器件經平均化處理后,就得到開關平均模型,用開關平均模型可以搭建各種電路。
以下是幾個開關電源的平均模型仿真例子,從電路波形中看不到開關量,只是平均量,比如電感中流過的電流是實際電感中的電流平均值,電容兩端的電壓是實際電容兩端電壓的平均值等等。
2.1.1 CCM BUCK(連續模式BUCK)
信息請登陸:輸配電設備網
先直流掃描Vc,得到所需的輸出電壓,即得到了電路的靜態工作點。然后交流掃描,得到Tu的Bode圖。Tu為雙極點。此處Vc等同于占空比d。 信息請登陸:輸配電設備網
2.1.2 DCM BUCK(斷續模式BUCK)
按以上方法得到Tu,在DCM下,Tu變成單極點函數。模型CCM-DCM即可用于連續模式,也可用于斷續模式。此處Vc仍等同于占空比d。
2.1.3 CCM BOOST(連續模式BOOST)
可以用模型搭建各種電路,如連續模式BOOST。 信息來源:http://tede.cn
2.1.4 Flyback
n是變壓器變比,原邊比副邊;L是變壓器原邊電感量。此處V6等同于d。 信息請登陸:輸配電設備網
2.2 受反饋電壓控制的仿真
實際電路中,占空比d的產生主要有兩種方法:電壓控制和電流控制。仿真時,電壓控制中d的產生方式如下: 信息來源:http://tede.cn
信息來源:http://tede.cn
Vc是反饋回路的輸出電壓,GAIN的放大倍數等于鋸齒波幅值的倒數,若鋸齒波幅值為Vm,則GAIN=1/Vm。
信息來自:輸配電設備網
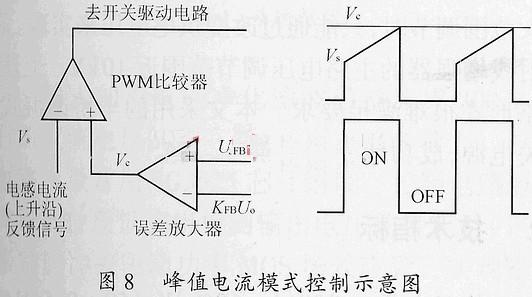
電流型控制中d的產生方式如下:
同上,Vc是反饋回路的輸出電壓;IL是用于產生鋸齒波的電流信號,例如在BUCK電路中是輸出電感電流,在Flyback中是變壓器原邊電流;V1是使電流上升的電壓,V2是使電流下降時的電壓;占空比d及d2是輸出變量。 信息來源:http://tede.cn
至此,我們可以得到控制電壓Vc到輸出電壓Vo的傳遞函數Tu。下面是幾個仿真Tu的例子。
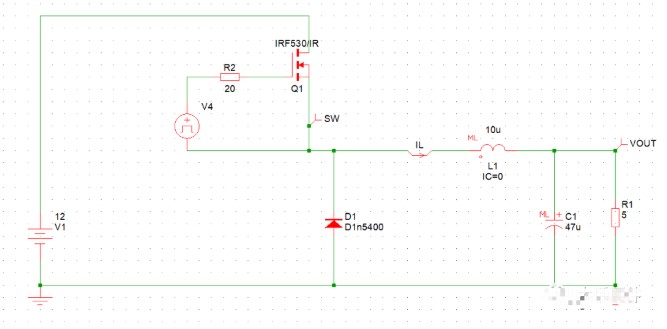
2.2.1 電壓型控制的CCM BUCK
上述幾個例子中加入GAIN就變成電壓型控制的仿真電路了。
2.2.2 電流型控制的CCM BUCK 信息來源:http://tede.cn
電流互感器將輸出電感的電流信號變成電壓信號IL,產生鋸齒波,模型CPM將控制電壓Vc與鋸齒波比較產生占空比d的PWM波。MOS開通時,L1中的電流上升,使其電流上升的電壓V1是Vg-Vo;Mos關斷時,Vo加在L1上,使其電流下降的低電壓V2=Vo。參數Rs是檢流電阻,mva是斜坡補償的斜率,單位是V/S,L是輸出電感,fs是開關頻率。
2.2.3 帶變壓器隔離的電流型BUCK電路
由于電路帶變壓器,所以平均開關模型也要用帶變壓器的模型CCM-T(帶變壓器的電流連續模式的模型)。參數Rs是原邊檢流電阻,n是變壓器變比(原邊:副邊),mva是斜坡補償的斜率,單位是V/S。
2.3 仿真實例 信息來自:輸配電設備網
實際電路中,選用不同的控制芯片,控制電壓Vc的產生方式是不同的。以下是幾個我們在工作中經常用到的幾種控制芯片的仿真實例。
信息請登陸:輸配電設備網
2.3.1 帶變壓器隔離的電流型CCM(UC3843)
UC3843自帶的運放歸為反饋回路,運放輸出的電壓作為控制電壓Vc。V9芯片內部的兩個二極管壓降,GAIN的放大倍數等于芯片內的電阻分壓。
此電路采用電流互感器采樣原邊電流,對于如下的采樣電路,Rs=R/n,n是電流互感器的匝比(n:1)。 信息來自:輸配電設備網
UC3843的斜率補償,對于下圖電路,補償斜率 ![]() (V/s)
(V/s)
2.3.2 帶隔離和電壓前饋的電壓型CCM(LM5025)
V6對應于芯片內部反饋信號的1V壓降,R、C為產生鋸齒波的參數。
信息來源:http://tede.cn
2.3.3準諧振反激電路 (UCC28600)
有時候用DC掃描來找靜態工作點時,往往不收斂,此時可以預先算出Vc值,然后用偏置點掃描(bias point)來得到靜態工作點。為改善收斂性,可以在關鍵點加NOTESET或IC,兩者的區別是:NOTESET只是給定某點地初始電壓,在偏置點掃描后,該點電壓可能會變化;IC是將某點電壓固定住,偏置點掃描后保持不變。上圖中Rs是原邊檢流電阻,eff是電源效率,Ctot是MOS管的DS端電容。按準諧振反激電路的特點,占空比d、原邊電流峰值Ip、開關頻率fs都由模型算出,不用給定。[來 信息來源:http://tede.cn
3 補償網絡設計
3.1 基本理論 信息來源:http://tede.cn
常用的開關電壓電源未補償的開環傳遞函數Tu可分為單極點和雙極點兩種,對于單極點一般采用PI(比例積分)補償,雙極點一般采用PID(比例積分微分)補償。也可以大致理解為電流型控制的采用PI補償,電壓型控制的采用PID補償。
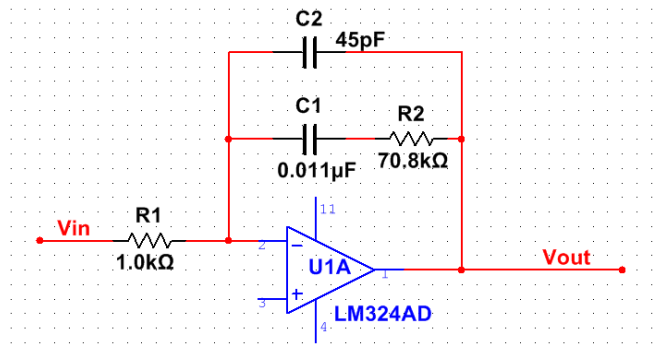
PI補償可以用如下電路實現:
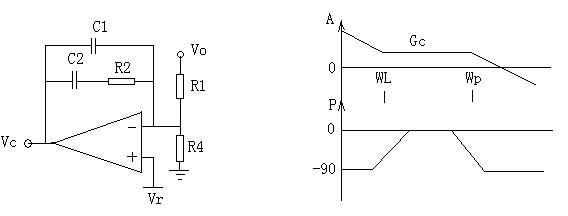
WL=1/(R2C2) Wp=1/(R2C1) Gc=R2/R1 (C2>>C1)
Gc是比例因子;零點WL引入積分,當頻率小于WL,增益增加,直流增益提高,意味著穩壓精度提高;極點Wp使高頻的干擾信號迅速衰減。需要注意的是上面的等式是在C2>>C1的假設下得到的,實際選擇反饋參數時要注意滿足這個條件。 信息來源:http://tede.cn
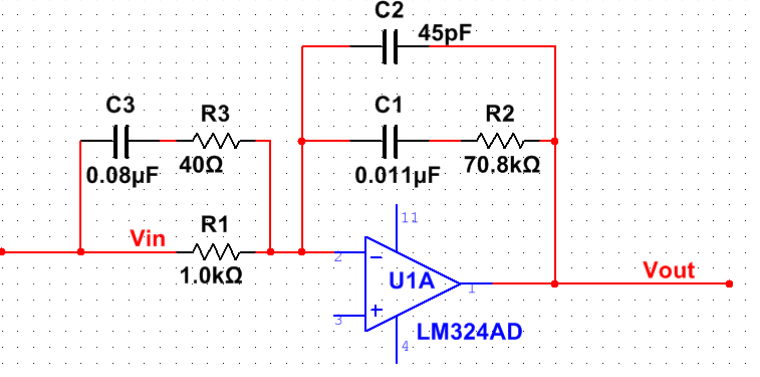
PID補償可以采用如下方式:
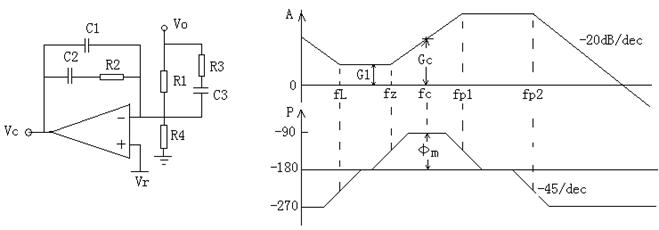
若R1>>R3,C2>>C1,有:![]()
![]()
![]()
![]()
![]() 信息來自:輸配電設備網
信息來自:輸配電設備網
為在fc點獲得θ的超前補償,有:
fL使低頻增益加大,提高穩壓精度;fz引入相位超前補償,增加相位裕度;fp1、fp2使高頻干擾衰減。注意滿足:R1>>R3,C2>>C1。
3.2補償網絡設計實例 信息請登陸:輸配電設備網
畫出Tu的Bode圖之后,就可以設計補償網絡了。下面對幾個實際電路進行分析。
3.2.1 非隔離的電壓型BUCK(TPS40007)
輸入5.5V,輸出3.3V/5A,開關頻率fs=300kHz。按照TPS40007的內部結構,鋸齒波的幅值是Vm=0.9V,所以控制電壓Vc到占空比D的傳遞函數Gain=1/Vm。補償網絡的設計步驟如下:
/psimu/ZXTJ/TJ6700/small signal 3V
第一步:去掉補償網絡,對控制電壓Vc(即補償網絡的輸出)進行直流掃描,找到使Vo=3.3V時的Vc值,將Vc的直流分量設為次值,即設置了電路的靜態工作點。 信息請登陸:輸配電設備網
第二步:對Vc進行交流掃描,得到未補償的Vc到Vo的傳遞函數Tu。Tu的直流增益為15.7dB,交越頻率為10.5kHz。 信息請登陸:輸配電設備網
第三步:設計補償網絡參數。由于是電壓型控制,所以采用PID補償。設補償后的交越頻率fc=20kHz,在fc處得到60°的相位補償;而Tu在fc處的增益是dbGc=-12.38;設置極點fp2=180kHz以抑制高頻干擾;R1=36K。按上述參數得到補償網絡的反饋參數:R2=40K(取39k), C2=7.4nF(取4.7nF),C1=53pF(取47pF),R3=1k, C3=820pF(取1nF)。
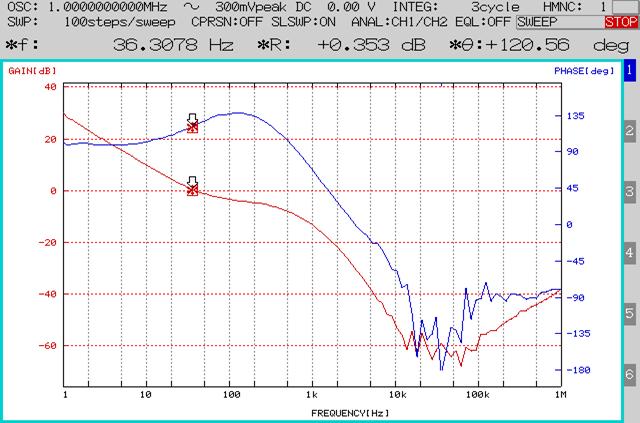
仿真結果:fc=24.7kHz, 相位裕度φm=43°。下面是實測的環路BODE 圖。 信息來源:http://tede.cn
實測的交越頻率及相位裕度都比仿真的大些,這是由于頻率高了以后,電路的分布參數影響的結果。
信息請登陸:輸配電設備網
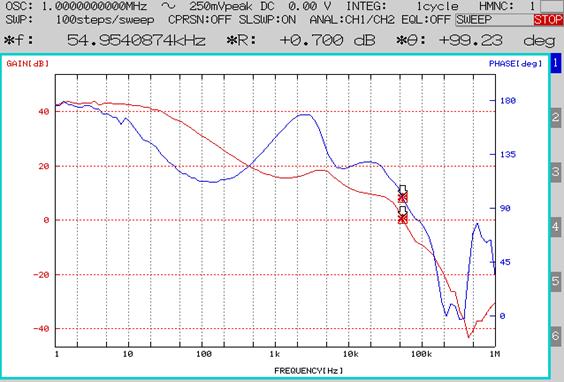
3.2.2 隔離的電流型BUCK(TDA16888)
輸入400Vdc,輸出54V/5A,開關頻率fs=100kHz。
信息來自:輸配電設備網
/psimu/zx500W/main/small signal1
為便于補償網絡的設計,將光藕部分也歸入未補償的傳遞函數Tu,即:只將補償網絡分開。那么Tu是光藕的輸入Vc(補償網絡運放的輸出)到輸出Vo的傳遞函數。
補償斜率mva的計算:芯片15腳的外接電容100pF,通過內部的10K電阻充電,時間常數只有1us,電源的開關頻率是100kHz,在電流信號與Vc比較的瞬間,外接電容已經基本充滿了電,對斜率補償沒有多大影響,實際上此處電容的作用只是消除電流檢測波形前端的尖峰。對環路特性有影響的斜率是指鋸齒波與Vc比較時的斜率。TDA16888芯片內部是將電流檢測信號放大了5倍,即加在電流鋸齒波信號上的補償斜率是電流信號本身斜率的4倍。根據實際電路結構,可以算出在變壓器原邊檢流電阻上的電流信號(實際是電壓信號)的斜率:
輸入電壓Vi=400V,變壓器變比n=2.875,輸出電感Lo=200uH,輸出電壓Vo=54V,輸出電感電流的上升斜率mi=(Vi/n-Vo)/Lo=0.425A/us,折合到原邊,電流上升斜率mip=mi/n=0.148A/us,在檢流電阻上的電壓上升率mv=mip*Rs(0.22)=0.0325V/us=32.5K V/s,也可以通過仿真直接得到電流斜率。由此得到補償斜率mva=4*mv=130K V/s。
信息來自:輸配電設備網
V9是芯片內部的壓降。
第一步:先得到Vc到Vo的傳遞函數Tu。方法是對Vc進行DC掃描,得到使輸出電壓為Vo時的Vc值,從而確定了電路的工作點(Bias point)。設定Vc的直流分量為工作點的值,然后進行AC掃描,得到Tu:DC增益32.84dB、轉折頻率fo=23.6Hz。
第二步:確定補償網絡的形式。因為是電流型控制,可以采用PI補償。補償前Tu的直流增益dbTuo=32.84dB,Tu的轉折頻率fo=23.57Hz,Tu的交越頻率fc’=1kHz。為提高系統的動態響應,將補償后的fc提高到2kHz(由于光藕的帶寬只有10kHz左右,所以在有光藕隔離的場合,很難將交越頻率提得很高);為提高穩壓精度,加入零點fL=fc/10;為抑制高頻干擾,加入極點fp=10*fc;在確定R1=33k后,可以算出反饋網絡的參數:R2=64k C2=12nF C1=120pF
第三步:將補償網絡加入環路中,此時得到的電路就和實際的一樣了。進行偏置點掃描(biaos point swip),得到電路各點的電壓,與實際的測試結果比較,保證電路的參數設計合適,比如可以看看光藕的If是否合適。將環路中各器件設計到合適的工作點是保證電路在各種環境下穩定工作及長的工作壽命的前提。注意:補償網絡的參數不會影響電路的靜態工作點。確定環路的靜態工作點后,加入Lf、Cf及Vsti進行AC掃描,得到整個系統補償后的開環傳遞函數T。
在上述仿真電路中,電感Lf很大,對直流信號相當于短路,所以不會影響整個環路的靜態工作點,Lf對交流信號來說相當于開路,所以仿真出的T是開環傳遞函數;Cf也很大,對激勵源Vsti來說相當于短路,從而引入激勵信號,Cf對直流信號相當于開路,Vsti的任何直流分量不會影響環路的靜態工作點。
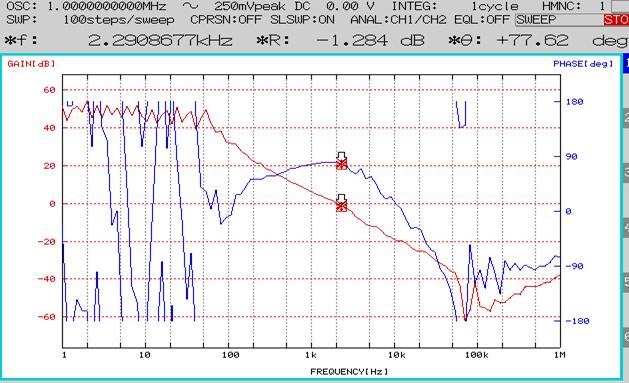
從仿真結果可以看出,交越頻率fc處的相位裕度φm=66°,且頻率低于fc的最低相位裕度也有36°,所以系統是穩定的。下面是實測的開環Bode圖。
3.2.3 帶前饋的電壓型隔離BUCK(LM5025)
輸入48V,輸出3.3V/40A,LM5025控制器,開關頻率fs=280kHz,下圖是實際電路參數,可以看出測試結果與仿真結果很相似,表示所建的仿真模型準確度是可以信賴的!
LM5025-2
信息來源:http://tede.cn
下面對此電路按上面的方法重新設計補償網絡。 信息來自:輸配電設備網
首先,將補償網絡移出,畫出從光藕輸入到Vo的未補償傳遞函數Tu。C8、C9、C6、R12不要,R6及Vr1是芯片內部參數,需保留。
信息來源:http://tede.cn
從仿真結果可以看出,Tu的直流增益很小,只有-0.44dB。原因是光藕的電阻R5接到了輸出Vo,從而降低了Vo對Vc的增益。若將R5接到一個固定電平VCC上,則整個增益增加了,Tu的直流增益增加到25.6dB!以此為基礎進行補償網絡設計。由于是電壓型控制,所以采用PID補償。由于本電源的開關頻率很高,達fs=280kHz,若沒有光藕隔離限制,補償后的交越頻率可取fc=0.2*fs=56kHz,但由于光藕的帶寬只有10kHz左右,且光藕引入的相位滯后在5kHz 以后急劇增加,所以為了得到盡可能大的帶寬,首先應對光藕進行適當補償以拓展其帶寬。此處在光藕的輸出加入RC零點。設補償后的交越頻率為fc=20kHz,Tu在fc處的增益dbGc=-8.67dB,希望在fc處得到60°的相位補償,設置極點fp2=180kHz以抑制高頻干擾,R1=100k//56k=35.9k,計算得到補償網絡如下:
補償后帶寬20kHz,相位裕度30°。仿真得到的相位裕度往往小于預期的值,這是由于補償網絡的運放及未完全補償的光藕造成的。
信息來源:http://tede.cn
3.2.4 準諧振Flyback(UCC28600)
信息來源:http://tede.cn
220Vac輸入、28V/2.3A輸出,光藕+TL431反饋。
UCC28600
先把補償網絡去掉,計算未補償的Vc到Vo的傳遞函數Tu,由于光藕直接接到輸出,所以Tu的直流增益很低。 信息來源:http://tede.cn
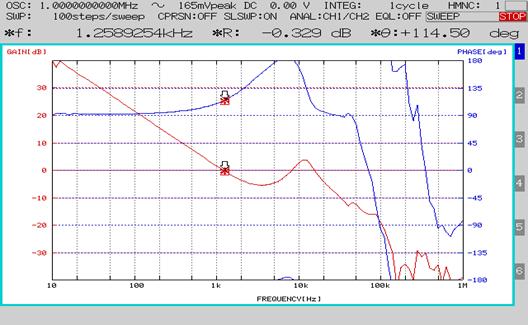
下面是實測的環路BODE圖,可見仿真結果與實測符合得很好。
將光藕的供電接15V穩壓電源后,Tu的直流增益增加到36.7dB,接上原有反饋網絡后,仿真值與實測值仍很相似。












 工商網監
工商網監
評論