 電子發(fā)燒友App
電子發(fā)燒友App


原理:
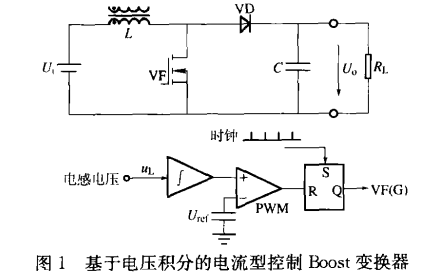
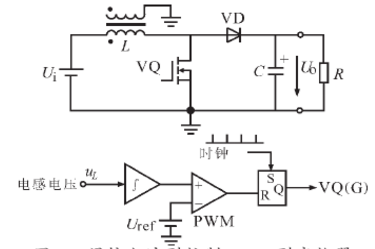
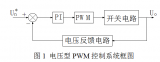
電流型脈寬調(diào)制(PWM)控制器是在普通電壓反饋PWM 控制環(huán)內(nèi)部增加了電流反饋的控制環(huán)節(jié),因而除了包含電壓型PWM 控制器的功能外,還能檢測開關(guān)電流或電感電流,實(shí)現(xiàn)電壓電流的雙環(huán)控制。控制原理框圖如下圖(圖1)所示。
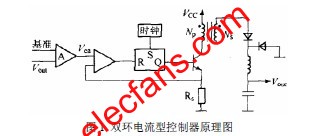
圖 1 雙環(huán)電流型控制器原理圖
從圖 1 可以看出,電流型控制器有兩個(gè)控制閉合環(huán)路:一個(gè)是輸出電壓反饋誤差放大器A,用于與基準(zhǔn)電壓比較后產(chǎn)生誤差電壓;另一個(gè)是變壓器初級(jí)(電感)中電流在Rs 上產(chǎn)生的電壓與誤差電壓進(jìn)行比較,產(chǎn)生調(diào)制脈沖的脈寬,使得誤差信號(hào)對(duì)峰值電感電流起著實(shí)際控制作用。系統(tǒng)工作過程如下:假定輸入電壓下降,整流后的直流電壓下降,經(jīng)電感延遲使輸出電壓下降,經(jīng)誤差放大器延遲Vca 上升,占空比變化,從而維持輸出電壓不變,在電流環(huán)中電感的峰值電流也隨輸入電壓下降,電感電流的斜率di/dt 下降,導(dǎo)致斜坡電壓推遲到達(dá)Vca,使PWM 占空比加大,起到調(diào)整輸出電壓的作用。由于既對(duì)電壓又對(duì)電流起控制作用,所以控制效果較好在實(shí)際中得到廣泛應(yīng)用。
特點(diǎn):
a)由于輸入電壓Vi 的變化立即反映為電感電流的變化,不經(jīng)過誤差放大器就能在比較器中改變輸出脈沖寬度(電流控制環(huán)),因而使得系統(tǒng)的電壓調(diào)整率非常好,可達(dá)到0.01%V, 能夠與線性移壓器相比。
b)由于雙環(huán)控制系統(tǒng)內(nèi)在的快速響應(yīng)和高穩(wěn)定性,反饋回路的增益較高,不會(huì)造成穩(wěn)定性與增益的矛盾,使輸出電壓有很高的精度。
c)由于Rs 上感應(yīng)出峰值電感電流,只要Rs 上電平達(dá)到1V,PWM 控制器就立即關(guān)閉,形成逐個(gè)脈沖限流電路,使得在任何輸入電壓和負(fù)載瞬態(tài)變化時(shí),功率開關(guān)管的峰值電流被控制在一定范圍內(nèi),在過載和短路時(shí)對(duì)主開關(guān)管起到有效保護(hù)。
d)誤差放大器用于控制,由于負(fù)載變化造成的輸出電壓變化,使得當(dāng)負(fù)載減小時(shí)電壓升高的幅度大大減小,明顯改善了負(fù)載調(diào)整率。
e)由于系統(tǒng)的內(nèi)環(huán)是一個(gè)良好的受控電流放大器,所以把電流取樣信號(hào)轉(zhuǎn)變成的電壓信號(hào)和一個(gè)公共電壓誤差放大器的輸出信號(hào)相比較,就可以實(shí)現(xiàn)并聯(lián)均流,因而系統(tǒng)并聯(lián)較易實(shí)現(xiàn)。
二、峰值電流控制與平均電流控制的比較
峰值電流模式控制和平均電流模式控制相比主要具有以下缺點(diǎn):
(1)對(duì)噪聲敏感,峰值電流模式控制是將電感電流的上升沿(即開關(guān)電流)同設(shè)定的電流值相比較,當(dāng)瞬態(tài)電流達(dá)到設(shè)定值,PWM比較器輸出翻轉(zhuǎn)將功率開關(guān)管關(guān)斷。電感電流上升到設(shè)定值的坡度即(Vin-Vout)/L 很小,特別是Vin 小時(shí)坡度更小,所以這種控制方法易受噪聲干擾。每次開關(guān)管通斷時(shí)都會(huì)產(chǎn)生噪聲尖峰,并且耦合到控制電路的一個(gè)小電壓就能使開關(guān)管迅速關(guān)斷,使電路處于次諧波運(yùn)作模式產(chǎn)生很大的紋波,所以對(duì)于峰值電流控制模式,電路布局和噪聲旁路設(shè)計(jì)對(duì)電路的正常工作很重要,平均電流模式控制可以簡化這部分工作。
(2)需斜坡補(bǔ)償,對(duì)于峰值電流控制,當(dāng)占空比大于50%時(shí)擾動(dòng)電流引起的電流誤差越變?cè)酱蟆K约夥咫娏髂J娇刂圃谡伎毡却笥?0%時(shí),電路工作不穩(wěn)定,需給PWM比較器加坡度補(bǔ)償以使電路穩(wěn)定。內(nèi)部電流環(huán)的增益尖峰會(huì)使相移超出范圍,導(dǎo)致電路工作不穩(wěn)定,使電壓環(huán)進(jìn)入次諧波振蕩。這時(shí)在連續(xù)固定的驅(qū)動(dòng)脈沖時(shí),輸出占空比卻在變化,這時(shí)也需斜坡補(bǔ)償來抑制次諧波振蕩。
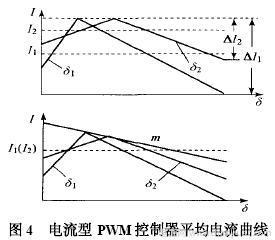
(3)具有尖峰值/平均值誤差,在尖峰電流控制模式中,隨著占空比的不同,電感電流的平均值亦不同,通過斜坡補(bǔ)償可以獲得不同占空比下一致的電感電流,但這也增加了電路的復(fù)雜性。另外電感電流的平均和峰值間也存在差值,在BUCK 電路中由于電感電流的紋波相對(duì)電感電流的平均值很小,并且存在電壓外環(huán)的校正作用,所以峰值和平均值的這種誤差可以忽略;在BOOST 電路中,峰值要跟隨輸入電網(wǎng)的正弦波,所以和平均值間的誤差很大,在小電流時(shí),尤其是電流不連續(xù)時(shí),如每半周期輸入電流過零時(shí),這種誤差最大,它會(huì)使輸入電流波形畸變。這時(shí)就需要一個(gè)大電感來使電感電流的紋波變小,但這將使電感電流的坡度變窄,減小抗干擾能力。
平均電流控制和峰值電流控制相比的優(yōu)點(diǎn)是:
① 具有高增益的電流放大器,平均電流可以精確地跟蹤電流設(shè)定值。這點(diǎn)應(yīng)用在高功率因數(shù)控制電路中尤其重要,此時(shí)用一個(gè)小電感就能獲得小于3%的諧波畸變,并且即使電路模型由連續(xù)電流模式過渡到不連續(xù)電流模式,平均電流法也能很好地工作;
② 噪聲抑制能力強(qiáng),因?yàn)楫?dāng)時(shí)鐘脈沖使功率開關(guān)管開通后,晶振幅度迅速降到了一個(gè)低值;
③ 無須斜坡補(bǔ)償,但為了電路工作穩(wěn)定,在開關(guān)頻率附近必須限定環(huán)路增益;
④ 平均電流法可應(yīng)用在任意電路拓?fù)渖?既能控制BUCK和Flyback 電路的輸入電流,又能控
制Boost 和Flyback 電路的輸出電流。若加入到PWM比較器輸入端的波形坡度不合適,功率開關(guān)控制電路就會(huì)發(fā)生次諧波振蕩。峰值電流控制通過外加斜坡補(bǔ)償來防止這種振蕩;平均電流控制是由晶振幅度來提供足夠的補(bǔ)償坡度的。
所以,用平均電流模式解決次諧波問題更為合適。在平均電流模式中為了抑制次諧波和限定開關(guān)頻率附近電流放大器增益,在電路設(shè)計(jì)中必須遵循的一條標(biāo)準(zhǔn)是:接到PWM比較器的一個(gè)輸入端的電感電流下降沿不能大于接到PWM 比較器的另一個(gè)輸入端的晶振幅值坡度。這也間接設(shè)定了最大電流環(huán)路增益的交越頻率。












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論