 電子發燒友App
電子發燒友App


數字化是開關電源的發展趨勢,它可以實現快速、靈活的控制設計,改善電路的瞬態響應性能,使之速度更快、精度更高,可靠性更強。因此,本文基于Saber仿真軟件對采用數字控制的大功率移相控制全橋ZVS電源系統( 12 V /5 000 A)進行了建模、仿真,并對仿真結果進行了分析。
1 主電路的建模
移相控制全橋ZVS2PWM變換器電路實現簡單、工作可靠,而且充分利用了器件的寄生參數,不需要加入輔助電路,比較適合大功率低壓大電流的應用場合,其主電路結構如圖1所示。

?
圖1 移相控制全橋ZVS2PWM電源系統主電路
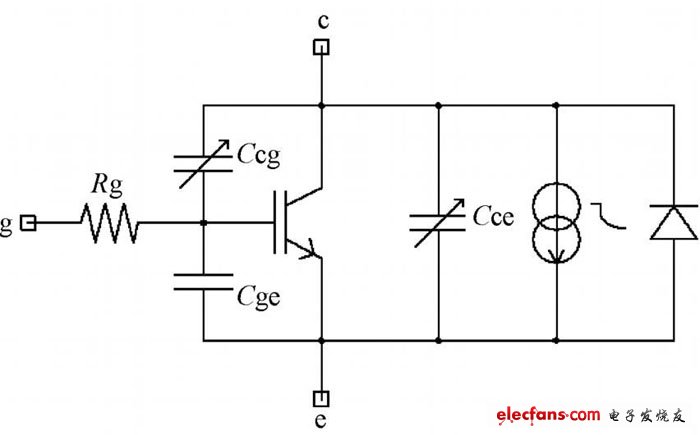
Saber軟件提供了功率器件建模工具Model Ar2chitect,如圖2所示為該工具提供的IGBT等效電路模型,根據實際器件的參數調整圖2中的各個參數值即可完成建模。本系統采用IGBT 的型號為CM400HA-24E,其額定參數為1 200 V /400 A.電容c1~c4為外接諧振電容,其中c1 = c3, c2 = c4。
高頻變壓器采用兩個單元變壓器串并聯的組合方式,它可以使并聯的輸出整流二極管之間實現自動均流,并且使得變壓器的設計模塊化,簡化變壓器的制作工藝,降低損耗。原邊用串聯電感lr作為變壓器的等效漏感, 用電流控制電壓源(CCVS)模塊來代替具有電流采樣作用的霍爾電流傳感器。
?
圖2 IGBT等效結構圖
次級輸出采用倍流整流電路結構,該結構中電感電流和變壓器次級電流小,整流管導通損耗及變壓器銅損較小;該結構具有雙電感交錯濾波,可在電感值較小的前提下,減小電流紋波,提高動態響應性能。
2 數字控制器的建模
2.1 峰值電流型控制方式
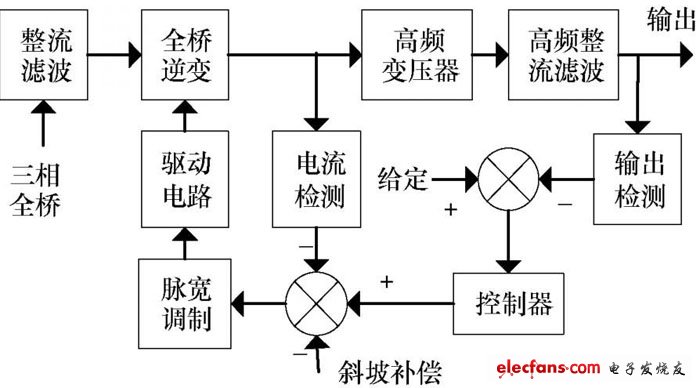
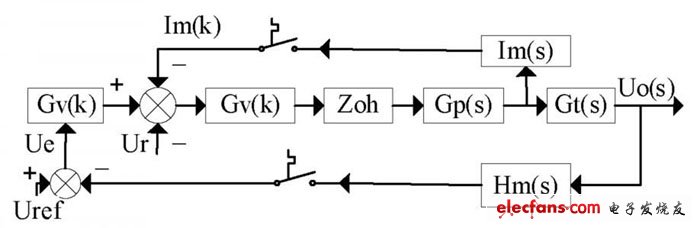
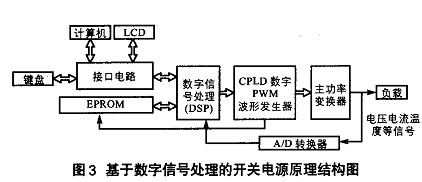
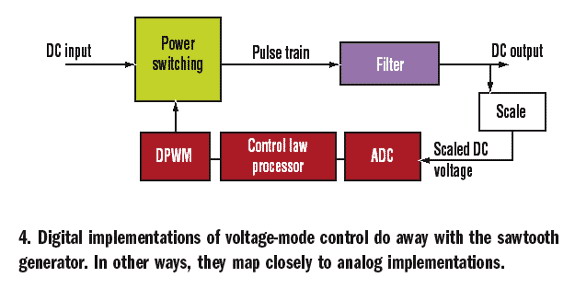
開關電源功率開關器件導通電流等內部變量的瞬態值具有相對獨立性,只有直接控制電流瞬態峰值,才能有效快速地保護功率開關器件,同時克服全橋變換器的偏磁問題,提高其動態反應速度和可靠性,因此,本系統采用峰值電流控制模式。峰值電流型控制模式開關電源的系統結構圖見圖3所示,系統控制數學模型見圖4所示。
?
圖3 開關電源系統結構圖
?
圖4 系統控制數學模型
2.2 P I調節器建模
P I調節是控制系統中最成熟,應用范圍最廣的一種調節方式,離散型P I控制器表達式為:

?
采用峰值電流模式控制的系統,當占空比大于0. 5時,會產生不穩定現象,采用斜坡補償可以改善系統性能,增加系統穩定性。依據其他資料,在控制工程實踐中,斜坡補償電壓的上升率一般設計為輸出電感電流檢測信號下降率折算值的70%~80%.
式(1)中: k為采樣序號; U ( k)為第K次采樣時P I調節器輸出的偏移量; Kp 為P I調節器的比例系數;T為采樣周期; Ti 為PI調節器積分時間; E ( k)為第k次采樣的偏差值。由式(1)可推出其離散P I增量式為:

?
式(2)中:U ( k - 1)為第k - 1次采樣時PI調節器輸出的偏移量; E ( k - 1)為第k - 1次采樣的偏差值;Ki 為P I調節器的積分參數。
P I調節器模型見圖5所示,其實現過程為:
AD電壓采樣環節由一個模數轉換接口"a2z"實現,采樣值為Z0 ( k ) , 電壓基準Zref由給定信號模塊"zdata"提供,兩者的差值為誤差項E ( k) ;利用放大模塊"zamp"將偏差值E ( k)放大積分系數Ki 倍,可得積分修正量ΔI ( k) ;將偏差值E ( k)通過減法模塊"zsub"減去由延遲模塊"zdelay"所保持的第k - 1次的偏差值E ( k - 1) ,再用放大模塊將上述差值放大比例參數Kp 倍,可得比例矯正值為ΔP ( k) ;最后由加法模塊"zadd"將積分修正量ΔI ( k) ,比例修正量ΔP ( k) ,以及由延遲模塊所保持的第k - 1 次結果U ( k - 1)相加可得第K次采樣結果U ( k)。

?
圖5 峰值電流型控制原理圖
電流環控制采用P調節,其實現過程為:霍爾電流傳感器采樣之后,由模數轉換接口將采樣值轉換為離散信號,經過一定倍數的放大之后,進行斜坡補償。斜坡補償環節由"z_pulse"模塊依據前述補償法則產生一定頻率一定斜率的三角波實現。
經過斜坡補償的電流信號與電壓P I調節產生的結果相比較得到最終的誤差調整值,最后由比較模塊"zcmp"構成飽和環節,用于防止輸出的移相值超出所能達到的移相范圍。
2.3 移相全橋PWM 波形調制
Saber和Simulink之間可以實現協同仿真,這樣可以發揮Simulink在軟件算法方面的優勢,通過自定義S函數產生移相PWM信號。以Saber為主機,調用Simulink,兩者以固定時間步長交換數據。
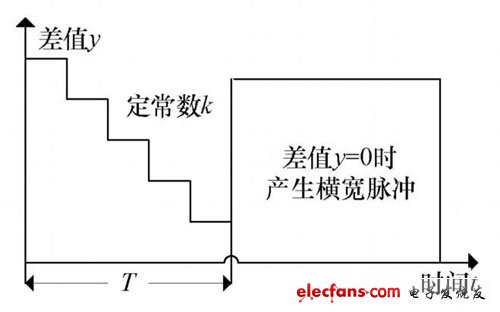
圖6所示為移相PWM脈沖實現原理圖。其主要原理為:當所對應的前驅動波形跳變為高時,由數字P I控制器得出的移相值U ( k)在遠小于周期的定時間減去一定常數k,當差值為零時產生一對與所對應前橋臂驅動等寬的脈沖波,圖中所示t即為移相時間。
?
圖6 移相原理。
圖7所示為實現移相過程的Saber模型,由"z_pulse"模塊產生固定頻率、占空比為50%的PWM信號,該信號與系統超前臂的驅動時序一致。圖中"switchpwm1"模塊相當于一個多路開關,其工作過程為:在超前臂脈沖由低變高時,接通輸入端,采樣反饋的偏移量,然后立刻脈沖模塊由高變低接通有離散保持作用的延時模塊"zdelay",最后通過減法模塊"zsub"減去固定常數k (由"z_ dc"模塊產生) ,經過延時模塊所設定的保持時間t后,所減結果再減去常數k,相減后的結果傳送到移相模塊"shiftpwm1"。

?
圖7 移相PWM調制模型。
"switchpwm1"和"shiftpwm1"兩個模塊都是通過Saber與Simulink協同工作的,它們通過調用S 2fuctiON來實現具體功能。將S函數樣本文件中的sys =mdlOutputs( t, x, u)作簡單修改即可。
3 仿真結果
系統輸入直流電壓為580 V,工作頻率20 kHz,開關管并聯電容c1~c4取47 nF,設定漏感lr = 10μH,比例參數Kp = 1,積分參數Ki = 0. 15,輸出濾波電感lo1 = lo2 = 0. 5μH,濾波電容co = 82 mF,變壓器匝數比n = 10.設定負載為2. 4 m歐,輸出電壓vo = 12 V,輸出電流io = 5 000 A.
?
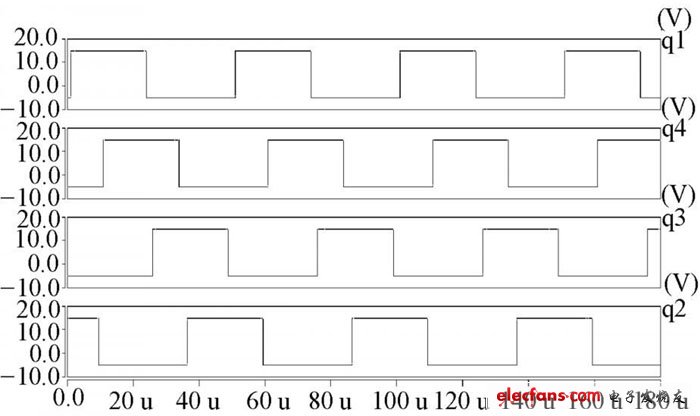
圖8 開關管驅動波形圖
圖8所示為開關管的驅動波形圖。q1和q3為超前臂開關管,互補導通180°(具有一定的死區時間) , q2和q4為滯后臂開關管,它們分別對q1和q3有一定的移相時間。
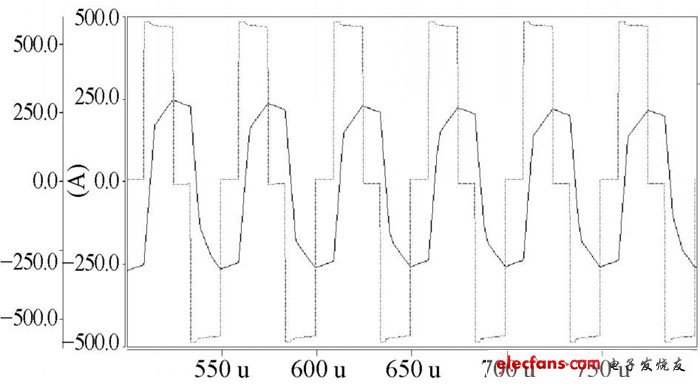
圖9所示為變壓器原邊電壓和電流波形,分析可得,該仿真系統的原邊電壓與電流波形與移相控制全橋ZVS2PWM變換器的工作原理是一致的。
?
圖9 變壓器原邊電壓與電流波形
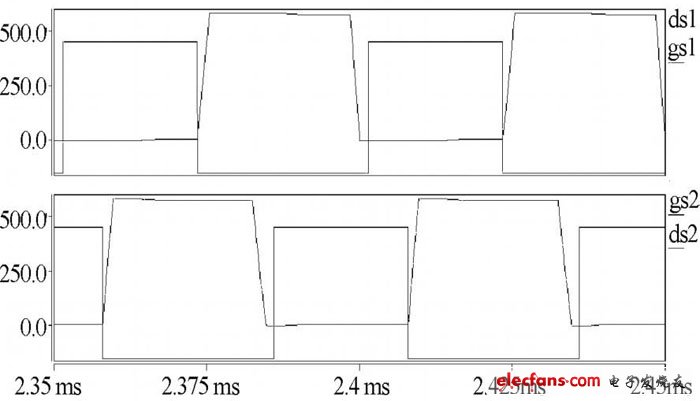
圖10所示為輸出為12 V /5 000 A時,超前臂開關管q1和滯后臂開關管q2的導通和關斷情況。
為便于分析,將驅動電壓ugs1 和ugs2 放大30 倍。
?
圖10 開關管q1、q2的導通和關斷情況。
從圖10中可以看出,無論開關管q1和q2,在導通之前,D、S兩端的電壓uds已降為零,說明開關管實現了零電壓導通;在開關管關斷之后, uds開始線性上升,說明開關管實現了零電壓關斷。
?
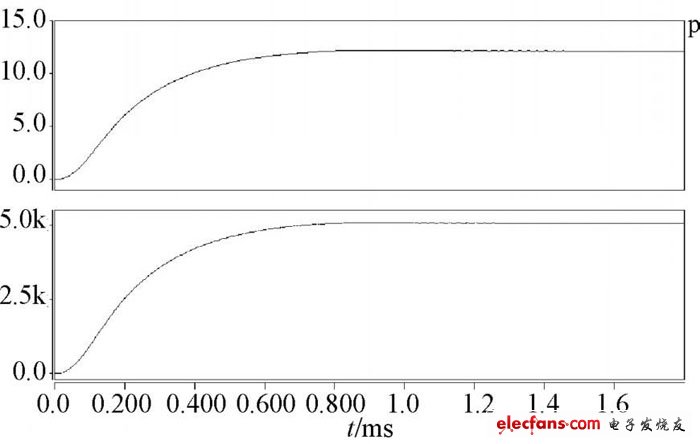
圖11 輸出電壓電流波形。
圖11所示為本仿真系統的輸出電壓和電流波形。由該結果可知,在112 ms左右輸出電壓達到12V穩態值,輸出電流達到5 000 A穩態值。電壓波形超調量小于0124 V,電流波形超調量小于100 A,滿足電壓上下波動2%的性能指標。
5 結論
通過仿真研究清楚的了解大功率開關電源系統的工作過程和工作特性,為數字電源的開發提供了重要參考依據,并能有效節省開發成本,縮短研發周期。











 工商網監
工商網監
評論