常用的A/D轉(zhuǎn)換器主要存在:失調(diào)誤差、增益誤差和線性誤差。這里主要討論失調(diào)誤差和增益誤差。提出一種用于提高TMS320F2812ADC精度的方法,使得ADC精度得到有效提高。
2016-08-05 15:21:37 21928
21928 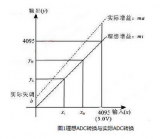
在上一篇文章中,我們討論了失調(diào)誤差如何影響單極性 ADC 的傳遞函數(shù)。考慮到這一點(diǎn),單極 ADC 的輸入只能接受正電壓。相比之下,雙極 ADC 的輸入可以處理正電壓和負(fù)電壓。在本文中,我們將探討雙極性和差分 ADC 中的失調(diào)和增益誤差規(guī)范;并了解失調(diào)誤差的單點(diǎn)校準(zhǔn)。
2022-09-13 10:31:192782 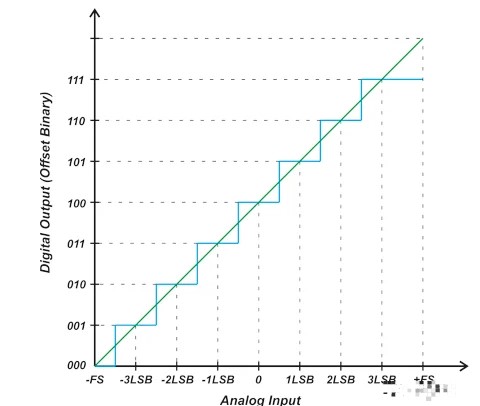
模數(shù)轉(zhuǎn)換器(ADC)有多種規(guī)格描述(specification)。根據(jù)應(yīng)用需求,其中一些規(guī)范可能比其他規(guī)范更重要。比如:在直流規(guī)格中,如失調(diào)誤差、增益誤差、積分非線性(INL)和差分非線性(DNL),在使用ADC對(duì)慢速移動(dòng)信號(hào)(如應(yīng)變片和溫度傳感器的信號(hào))進(jìn)行數(shù)字化處理的儀器儀表應(yīng)用中尤為重要。
2022-11-29 10:04:16679 本篇文章列出了影響模數(shù)轉(zhuǎn)換精度的主要誤差。這些類型的誤差存在于所有模數(shù)轉(zhuǎn)換器中,轉(zhuǎn)換質(zhì)量將取決于它們的消除情況。STM32微控制器數(shù)據(jù)手冊(cè)的ADC特性部分規(guī)定了這些誤差 值。規(guī)定了STM32 ADC
2023-08-04 10:35:201199 
激光波長(zhǎng)是激光技術(shù)中的重要參數(shù),對(duì)于激光的應(yīng)用和性能有著重要影響。因此,準(zhǔn)確測(cè)量激光波長(zhǎng)是非常重要的。然而,在實(shí)際測(cè)量過(guò)程中,由于各種因素的影響,可能會(huì)產(chǎn)生一定的誤差。本文將詳細(xì)分析激光波長(zhǎng)測(cè)定
2023-12-14 14:29:03460 要測(cè)量弱電流,就必須理解各種潛在的誤差源,這些誤差會(huì)造成人們所不希望出現(xiàn)的測(cè)量誤差。影響多種類型的納米電子器件的測(cè)量結(jié)果的兩種極為常見(jiàn)的誤差源是摩擦生電效應(yīng)和電化
2012-01-04 17:09:25617 
誤差放大器是接受一個(gè)比例的輸出電壓信號(hào),與其內(nèi)部標(biāo)準(zhǔn)電壓信號(hào)比較,輸出信號(hào)控制開(kāi)關(guān)管的導(dǎo)通使其接收信號(hào)和參考信號(hào)無(wú)限接近,請(qǐng)問(wèn)誤差放大器內(nèi)部電路結(jié)構(gòu)也是類似于差分放大器的結(jié)構(gòu)嗎,其電路原理和結(jié)構(gòu)
2024-01-16 19:14:43
在電路中經(jīng)常遇到誤差放大器,該電路的原理是什么,如何實(shí)現(xiàn)其誤差放大功能的?對(duì)于具體的誤差放大器電路分析?
和差分放大器、比較器的區(qū)別是什么?
2024-01-26 21:53:10
用MC33035搭配AD5621驅(qū)動(dòng)直流無(wú)刷電機(jī),采用增量式PID速度閉環(huán)控制,為什么電機(jī)高速(600rpm以上)運(yùn)行誤差小,低速(600rmp以下)誤差大?
2021-01-19 15:21:08
CMV誤差的產(chǎn)生原因是什么?消除CMV誤差有哪些方法?
2021-04-12 06:20:40
所謂PID指的是Proportion-Integral-Differential。翻譯成中文是比例-積分-微分。 記住兩句話: 1、PID是經(jīng)典控制(使用年代久遠(yuǎn)) 2、PID是誤差控制() 對(duì)電機(jī)
2021-09-03 08:50:12
我想請(qǐng)問(wèn)一下在處理數(shù)據(jù)的隨機(jī)誤差時(shí)計(jì)算極限誤差時(shí)已知置信概率在matlab中如何利用正太分布積分表求t希望大佬可以幫忙解答~萬(wàn)分感謝
2017-10-07 21:08:31
文章目錄1 電源完整性1.1 電源分配系統(tǒng)(Power Distribution Network,PDN)1.2 為什么要重視電源的噪聲1.3 電源的輸出誤差及噪聲誤差1.4 PDN系統(tǒng)的噪聲來(lái)源
2021-12-31 07:51:19
一、儀表的誤差分類儀表的誤差是指無(wú)論哪種電工儀表,也不論其質(zhì)量多高,它的測(cè)量結(jié)果與被測(cè)量的實(shí)際值之間總會(huì)存在一定的差值。誤差值的大小可以用來(lái)反映儀表本身的準(zhǔn)確程度,在技術(shù)參數(shù)中,儀表的準(zhǔn)確度被用來(lái)
2018-02-08 09:25:02
手頭有一個(gè)剔除粗大誤差的程式。當(dāng)粗大誤差為一個(gè)時(shí),可以正常剔除,但是當(dāng)有兩個(gè)及以上粗大誤差的時(shí)候就會(huì)出現(xiàn)錯(cuò)誤,無(wú)法正常剔除,有沒(méi)有人能幫忙看一下啊
2016-11-14 22:48:17
在mahnoy互補(bǔ)濾波算法中,是通過(guò)把加速度傳感器測(cè)得的重力加速度和姿態(tài)矩陣計(jì)算出的重力加速度進(jìn)行向量叉乘得到誤差,再將該誤差經(jīng)過(guò)PI計(jì)算補(bǔ)償陀螺儀測(cè)量得到的角速度。我的問(wèn)題是,叉乘求誤差中,是通過(guò)
2019-05-17 03:38:02
哪位大神可以幫忙下啊我要用LABVIEw做一個(gè)數(shù)據(jù)處理系統(tǒng) 要求算出數(shù)據(jù)的系統(tǒng)誤差 隨機(jī)誤差 和 粗大誤差哪個(gè)大神可以教教我啊小的不勝感激··比較急看到的好心人回復(fù)下吧
2014-05-28 15:58:06
delay_ms(1000),延時(shí),3.2 秒,怎么誤差會(huì)這么大????是我哪里搞錯(cuò)了,還是,硬件仿真,本來(lái)誤差就這么大???????求解呀。64腳實(shí)驗(yàn).rar (3.65 MB )
2020-05-22 09:37:15
本文將重點(diǎn)關(guān)注相電流測(cè)量引起的扭矩紋波。我們將對(duì)每種誤差進(jìn)行分析,并討論最大限度地減小測(cè)量誤差影響的方法。
2019-08-12 06:37:22
計(jì)算系統(tǒng)的總誤差是一件需要些技巧的工作,特別是在技術(shù)規(guī)格的單位變化很大時(shí)更是如此。當(dāng)計(jì)算總體誤差時(shí),在合并前,所有技術(shù)規(guī)格必須被轉(zhuǎn)換為一個(gè)共同的單位。這篇博文將告訴你如何在伏特、百分率和百萬(wàn)分率
2018-09-11 14:49:48
在數(shù)據(jù)轉(zhuǎn)換系統(tǒng)中校準(zhǔn)增益誤差的方法如何通過(guò)調(diào)整電壓基準(zhǔn)校準(zhǔn)增益誤差?怎么實(shí)現(xiàn)電壓基準(zhǔn)微調(diào)?
2021-04-09 06:13:12
轉(zhuǎn)貼一、測(cè)量誤差的幾個(gè)名詞術(shù)語(yǔ)1.真值在一定的時(shí)間、空間條件下,被測(cè)量的大小是一個(gè)客觀存在的確定數(shù)值,即真值。真值是客觀存在的,但是不可測(cè)量的。隨著科學(xué)技術(shù)的不斷發(fā)展,人們對(duì)客觀事物認(rèn)識(shí)的不斷提高
2017-11-28 10:14:46
在給定信號(hào)鏈中累積的直流誤差的類型
2021-03-10 08:32:30
算法對(duì)比誤差公式 D
2021-09-17 08:38:29
系統(tǒng)誤差具有確定的變化規(guī)律,不論其變化規(guī)律如何,根據(jù)對(duì)系統(tǒng)誤差的掌握程度,可分為已定系統(tǒng)誤差和未定系統(tǒng)誤差。由于這兩種系統(tǒng)誤差的特征不同,其合成方法也不相同。 01、已定系統(tǒng)誤差的合成 已定
2021-03-22 16:34:40
系統(tǒng)誤差有確定的客觀規(guī)律,要在掌握其來(lái)源的基礎(chǔ)上采取有關(guān)技術(shù)措施消除或削弱。對(duì)于系統(tǒng)誤差的處理只能根據(jù)具體情況采取不同的措施,因而需要測(cè)量者充分發(fā)揮其學(xué)識(shí)、經(jīng)驗(yàn)和技巧水平進(jìn)行處理。由實(shí)踐經(jīng)驗(yàn)
2017-12-04 11:24:56
隨機(jī)誤差的合成形式包括標(biāo)準(zhǔn)差合成和極限誤差合成。 01、標(biāo)準(zhǔn)差合成 合成標(biāo)準(zhǔn)差表達(dá)式: q個(gè)單項(xiàng)隨機(jī)誤差,標(biāo)準(zhǔn)差 ; 誤差傳播系數(shù) 若各個(gè)誤差互不相關(guān),即相關(guān)系數(shù)
2021-03-22 16:36:39
今天看到一個(gè)運(yùn)放誤差計(jì)算方法,在這上面有一個(gè)失調(diào)電流產(chǎn)生的電壓誤差,這個(gè)電壓怎么計(jì)算?
2013-08-19 11:24:34
研究了在考慮副瓣情況下的GPS多徑碼相跟蹤誤差和載波相位跟蹤誤差以及不同早減遲間距的影響。基于非相關(guān)早減遲延時(shí)鎖定環(huán)和反正切載波跟蹤環(huán),得出了由一般形式的誤差解
2009-03-03 23:19:19 14
14 本文介紹了數(shù)控機(jī)床的螺距誤差補(bǔ)償原理和基于激光干涉儀的螺距誤差測(cè)量系統(tǒng),并且討論了在螺距誤差測(cè)量中所出現(xiàn)的問(wèn)題和解決方案,最后介紹了螺距誤差補(bǔ)償?shù)倪m用范圍。
2009-05-05 22:01:0574 齒輪副的安裝誤差1.軸線的平行度誤差△fx 、△fy :≤平行度公差fx 、fy 2.齒輪副的中心距偏差△fa:實(shí)際中心距與公稱中心距之差。即:a’-a=△ fa規(guī)定:-fa ≤△fa
2009-05-14 23:33:2216 研究了一種智能電子羅盤的誤差補(bǔ)償問(wèn)題。把誤差的形成過(guò)程假設(shè)為從圓到橢圓的變化過(guò)程(橢圓假設(shè)) ,其逆過(guò)程就是誤差補(bǔ)償?shù)倪^(guò)程。研究了基于橢圓假設(shè)求解誤差系數(shù)算法和誤差
2009-06-22 11:55:3241 現(xiàn)代測(cè)量誤差概念的內(nèi)涵與外延:]誤差和精度是測(cè)量平差與數(shù)據(jù)處理研究的最基本單元。文章對(duì)現(xiàn)代測(cè)量學(xué)科中的誤差重新進(jìn)行定義與分類,依據(jù)誤差的分類對(duì)精度作更加明確而直觀
2010-01-08 18:14:467 在相同的觀測(cè)條件下,對(duì)某一量進(jìn)行一系列測(cè)量,如果測(cè)量誤差在大小和符號(hào)上呈現(xiàn)一致性,即按一定的規(guī)律變化或保持為常數(shù),這種誤差稱之為系統(tǒng)誤差。系統(tǒng)誤差具有積累性
2010-10-22 16:23:3215 誤差從性質(zhì)上分類、特點(diǎn) 誤差從性質(zhì)上可分為三大類,即:系統(tǒng)誤差 隨機(jī)(偶然)誤差 疏失誤差(粗大誤差、過(guò)失誤差)
2008-09-18 01:12:5711846 系統(tǒng)誤差的分類
系統(tǒng)誤差按照它服從的規(guī)律 . 可以分成以下兩種類型:
1、 恒定系統(tǒng)誤差 ( 又稱固定系統(tǒng)誤差或定值系統(tǒng)誤差 ) . 它的特點(diǎn)是在
2008-11-24 15:46:5811493 
新型誤差放大電路圖
更詳細(xì)的介紹:
2008-12-14 11:09:38770 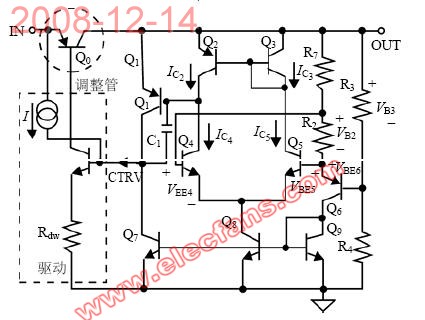
誤差分析及處理技術(shù)
測(cè)量誤差的基本概念
1. 絕對(duì)誤差絕對(duì)誤差是示值(或稱測(cè)量值)與被測(cè)量真值之間
2009-05-19 08:41:00875 
電流互感器誤差與校驗(yàn)
本文簡(jiǎn)述電流互感器的主要誤差特性,并闡述了影響電流互感器誤差的因素及減小誤差的措施;說(shuō)明了繼電保護(hù)
2009-07-11 22:53:461945 影響電流互感器誤差的因素
1.電流互感器的內(nèi)部參數(shù)是影響電流互感器誤差的主要因素。 ⑴ 二次線圈內(nèi)阻R2和漏抗X2對(duì)誤差的影
2009-07-12 10:24:526311
如何巧算萬(wàn)用表測(cè)量電壓誤差
2009-08-13 17:33:161320 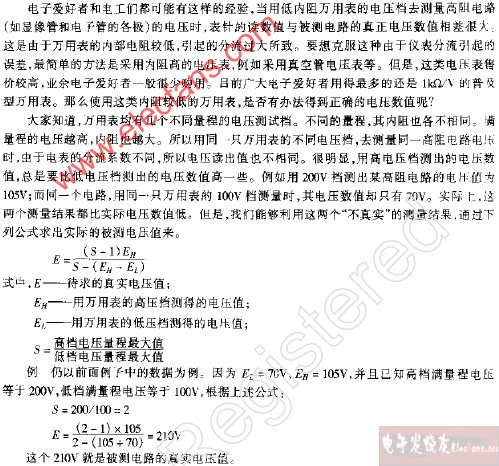
萬(wàn)用表直流電流誤差大,且名量程都是比例相同的正誤差(負(fù)誤差)故障修理
原因:對(duì)于誤差為正誤差:①與表頭串聯(lián)的電阻值變小
2009-08-24 18:10:431232
調(diào)整兆歐表誤差的技巧
2009-08-25 17:08:121471 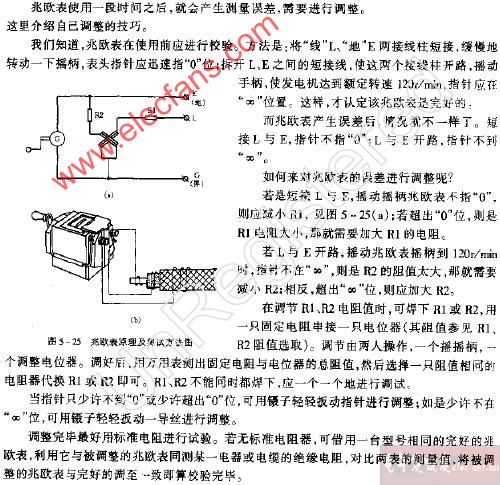
誤差、偏差、修正值的關(guān)系
誤差:測(cè)量結(jié)果減去被測(cè)量的真值。偏差:一個(gè)值減去其參考值。修正值:用代數(shù)
2010-05-05 11:58:167466 3.1 誤差的概念與分類 3.1.1 測(cè)量誤差的概念及表達(dá)式 3.1.2 測(cè)量誤差的分析 3.2 隨機(jī)誤差的處理 3.2.1 隨機(jī)誤差的概率分布 3.2.2 被測(cè)量真值和測(cè)量方差的估計(jì)值 3.2.3 測(cè)量結(jié)果的置信度與表示方法 3.3 系統(tǒng)誤差的處理 3.3.1 系統(tǒng)誤差的分類 3.3.2 判斷系統(tǒng)誤
2011-03-13 20:19:090 本文提出一種采用電消隙技術(shù)減小回程誤差的方法。通過(guò)對(duì)回程誤差進(jìn)行分析,從結(jié)構(gòu)和電路兩方面分別介紹減小回程誤差的措施,并結(jié)合船載雷達(dá)設(shè)備重點(diǎn)對(duì)電消隙技術(shù)進(jìn)行研究分析
2011-04-28 10:46:1438 針對(duì)衛(wèi)星定位信息誤差形成的原因和組成,分析了幾何精度因子在誤差形成中的影響,在對(duì)誤差分析的基礎(chǔ)上提出了一種誤差處理的數(shù)學(xué)模型,采用卡爾曼濾波的方法對(duì)誤差進(jìn)行處理。實(shí)驗(yàn)
2011-11-04 11:25:0271 在原油動(dòng)態(tài)計(jì)量和靜態(tài)計(jì)量過(guò)程中,造成油品計(jì)量誤差主要有立式金屬罐容積計(jì)量誤差、計(jì)量器具誤差、人為操作誤差、化驗(yàn)過(guò)程造成的誤差等4個(gè)方面的因素。本文在分析各種誤差產(chǎn)生
2012-10-24 10:59:1234 本文針對(duì)半閉環(huán)伺服壓裝系統(tǒng)的誤差特點(diǎn),設(shè)計(jì)使用剛性塊作為輔助裝置進(jìn)行誤差標(biāo)定,并通過(guò)最小二乘法擬合和誤差表格插值,實(shí)現(xiàn)誤差的補(bǔ)償。經(jīng)過(guò)對(duì)隨機(jī)選取的實(shí)際生產(chǎn)數(shù)據(jù)進(jìn)行誤差補(bǔ)償并與數(shù)顯千分表實(shí)測(cè)值進(jìn)行對(duì)比分析后得,補(bǔ)償后的誤差可以控制在1%左右,極大地提高了零部件壓裝合格判定的準(zhǔn)確度。
2015-12-24 16:05:2512 基于四叉樹(shù)包圍球和屏幕誤差的LOD算法_王倩
2017-01-07 18:56:130 計(jì)算系統(tǒng)的總誤差是一件需要些技巧的工作,特別是在技術(shù)規(guī)格的單位變化很大時(shí)更是如此。當(dāng)計(jì)算總體誤差時(shí),在合并前,所有技術(shù)規(guī)格必須被轉(zhuǎn)換為一個(gè)共同的單位。這篇博文將告訴你如何在伏特、百分率和百萬(wàn)
2017-04-17 20:58:321386 
針對(duì)用于激光焊接的關(guān)節(jié)型工業(yè)機(jī)器人運(yùn)動(dòng)誤差控制問(wèn)題,根據(jù)關(guān)節(jié)型工業(yè)機(jī)器人伺服控制和運(yùn)動(dòng)學(xué)原理,分析了機(jī)器人運(yùn)動(dòng)誤差的積累過(guò)程,并對(duì)運(yùn)動(dòng)誤差和伺服系統(tǒng)誤差分別進(jìn)行了測(cè)量和比較。結(jié)果表明,伺服系統(tǒng)誤差是運(yùn)動(dòng)誤差的重要組成部分。該結(jié)論對(duì)機(jī)器人激光焊接的路徑控制具有一定參考意義。
2017-10-12 18:19:066 使用任何儀器進(jìn)行測(cè)量時(shí),都存在測(cè)量誤差。測(cè)量結(jié)果與測(cè)量的真值之間的差異,稱為測(cè)量誤差。真值就是一個(gè)量所具有的真實(shí)數(shù)值。真值是一個(gè)理想概念,實(shí)際應(yīng)用中通常用實(shí)際值來(lái)替代真值。實(shí)際值是根據(jù)測(cè)量誤差的要求
2017-11-23 15:51:182205 星點(diǎn)質(zhì)心的精確提取是提高星光制導(dǎo)精度的關(guān)鍵。本文針對(duì)單星點(diǎn)成像過(guò)程中影響質(zhì)心提取精度的誤差因素進(jìn)行分析,詳細(xì)推導(dǎo)與分析了由于離散化與敏感區(qū)域缺失等原因引起的亞像素級(jí)別成像誤差并給出相應(yīng)的誤差曲線,對(duì)于進(jìn)一步提高星點(diǎn)質(zhì)心坐標(biāo)的精度具有重要作用。
2017-12-22 15:17:081 提出了一種信號(hào)一誤差恒模(CM)算法。用Godard恒模算法推導(dǎo)出來(lái)的權(quán)值迭代公式中的誤差用一個(gè)變化的信號(hào)來(lái)代替。信號(hào)一誤差恒模算法的優(yōu)點(diǎn)是權(quán)值計(jì)算公式的乘積被一個(gè)信號(hào)變化代替,并且如果步長(zhǎng)選擇
2017-12-29 17:19:551 分析陣面安裝誤差對(duì)相控陣?yán)走_(dá)測(cè)角精度的影響,對(duì)研究和設(shè)計(jì)高精度相控陣?yán)走_(dá)非常重要。建立了相控陣?yán)走_(dá)陣面安裝誤差測(cè)角精度誤差模型,分別仿真分析了陣面傾角安裝誤差、陣面方位法向誤差和陣面不水平度對(duì)相控陣
2018-02-27 10:24:170 時(shí),這意味著該裝置不存在疊加誤差或“疊加保持”。對(duì)于一個(gè)具有很少或沒(méi)有疊加誤差的DAC,任何給定碼的線性誤差都與T有關(guān)。o在某些不同的代碼中的線性誤差。這允許您確定最壞情況的線性誤差,以及發(fā)生錯(cuò)誤的數(shù)字代碼,通過(guò)一個(gè)非常簡(jiǎn)單的測(cè)試。
2018-05-18 17:56:149 空偏置誤差只是慣性傳感器偏離零時(shí)的誤差正在經(jīng)歷無(wú)刺激 - 加速度計(jì)為零g或陀螺儀無(wú)旋轉(zhuǎn)。通常,所有傳感器都表現(xiàn)出至少兩種形式的零偏差誤差:初始零偏差誤差和由于溫度引起的零偏差誤差。
2019-04-10 10:04:113553 流量計(jì)測(cè)量結(jié)果減去被測(cè)量的真值所得的差,稱為測(cè)量誤差,簡(jiǎn)稱誤差。 當(dāng)儀表發(fā)生誤差時(shí)可以采用以下方法進(jìn)行修正。
2019-06-25 16:14:053780 形位公差包括形狀公差和位置公差。任何零件都是由點(diǎn)、線、面構(gòu)成的,這些點(diǎn)、線、面稱為要素。機(jī)械加工后零件的實(shí)際要素相對(duì)于理想要素總有誤差,包括形狀誤差和位置誤差。這類誤差影響機(jī)械產(chǎn)品的功能,設(shè)計(jì)時(shí)應(yīng)規(guī)定相應(yīng)的公差并按規(guī)定的標(biāo)準(zhǔn)符號(hào)標(biāo)注在圖樣上。形狀公差和位置公差簡(jiǎn)稱為形位公差。
2019-06-26 13:55:107977 系統(tǒng)誤差,指的就是測(cè)量器具或方法引起的有規(guī)律的誤差,體現(xiàn)為與真值之間的偏差,如儀器零點(diǎn)誤差,經(jīng)年變化誤差,溫度、電磁場(chǎng)等環(huán)境條件引起的誤差,動(dòng)力源引起的誤差等。這種誤差的值和符號(hào)保持不變,或測(cè)量條件
2019-07-01 16:25:17751 根據(jù)測(cè)量誤差的性質(zhì)(或出現(xiàn)的規(guī)律),產(chǎn)生的原因,測(cè)量誤差可分為系統(tǒng)誤差、隨機(jī)誤差和粗大誤差三類。
2019-11-02 06:12:0067661 任何測(cè)量的設(shè)備都會(huì)或多或少的產(chǎn)生些無(wú)可避免的誤差,像其他的設(shè)備一樣,傳感器也會(huì)出現(xiàn)誤差。為了維持一致性,誤差定義為測(cè)量值和真實(shí)值之間的差。
2019-11-29 16:04:554381 當(dāng)我們知道電流互感器的誤差主要是由于勵(lì)磁電流Ie引起的之后,就有必要根據(jù)實(shí)際運(yùn)行情況來(lái)檢驗(yàn)所使用的電流互感器的誤差是否符合要求。互感器的誤差包括角度誤差和幅值誤差。
2020-01-23 14:31:009243 本文檔的主要內(nèi)容詳細(xì)介紹的是如何消除穩(wěn)態(tài)誤差。
2019-12-30 08:00:000 三坐標(biāo)測(cè)量?jī)x除了定位誤差,直線度誤差,角運(yùn)動(dòng)誤差,垂直度誤差這四個(gè)幾何誤差之外,還有由于力變形、熱變形、測(cè)量系統(tǒng)、測(cè)頭系統(tǒng)、控制系統(tǒng)、數(shù)據(jù)記錄和處理系統(tǒng)產(chǎn)生的誤差。
2020-05-15 10:36:395844 隨機(jī)誤差是許多微小的、獨(dú)立的、不可分割的系統(tǒng)誤差的統(tǒng)計(jì)綜合。或者說(shuō),它是多種因素造成的許多微小誤差的總和。
2020-08-24 15:00:561933 任何刀具在切削過(guò)程中都不可避免要產(chǎn)生磨損,并由此引起工件尺寸和形狀地改變。刀具幾何誤差對(duì)機(jī)械加工誤差的影響隨刀具種類的不同而不同:采用定尺寸刀具加工時(shí),刀具的制造誤差會(huì)直接影響工件的加工精度;而對(duì)一般刀具(如車刀等),其制造誤差對(duì)機(jī)械加工誤差無(wú)直接影響。
2020-09-08 11:33:463239 雙輪差速驅(qū)動(dòng)搬運(yùn)AGV 在運(yùn)動(dòng)過(guò)程中,由于傳感器的累積誤差、機(jī)械傳動(dòng)誤差以及裝配誤差等因素,會(huì)導(dǎo)致AGV 通過(guò)傳感器讀數(shù)計(jì)算的位姿與實(shí)際位姿之間產(chǎn)生累積誤差。具體表現(xiàn)在短時(shí)間內(nèi)AGV 定位精度下降,隨著時(shí)間的增加,累積誤差會(huì)越來(lái)越大,最后導(dǎo)致AGV 運(yùn)動(dòng)出錯(cuò)。
2021-03-20 09:29:072108 
本技術(shù)簡(jiǎn)介對(duì) ADC 中的增益誤差和失調(diào)誤差進(jìn)行了簡(jiǎn)要介紹。它還介紹了一種在帶有 Arm? Cortex?-M0+內(nèi)核的 SAM 系列單片機(jī)(MCU)中校準(zhǔn)增益誤差和失調(diào)誤差的方法。在 SAM
2021-04-01 10:14:4342 誤差向量分析是一種用幅度誤差和相位誤差定量表示發(fā)射機(jī)或接收機(jī)性能的方法。通過(guò)采用具有誤差向量分析功能的向量信號(hào)分析儀,工程師可以在線研究信號(hào)空間的幅度值和相位誤差,同時(shí)可以調(diào)整接收機(jī)鏈路參數(shù)。
2021-06-23 16:17:402684 
本文總結(jié)了燃?xì)獗頇z定出現(xiàn)誤差的幾點(diǎn)影響因素,為了提高燃?xì)獗頇z定的準(zhǔn)確度,保障燃?xì)庥脩舻睦妫瑫r(shí)避免燃?xì)夤九c燃?xì)庥脩舢a(chǎn)生經(jīng)濟(jì)糾紛,必須合理的控制燃?xì)獗頇z定的誤差。本文根據(jù)燃?xì)獗頇z定誤差的原因,例舉
2021-12-13 09:22:24778 頻率誤差的要求之前我們已經(jīng)學(xué)習(xí)過(guò)不少。今天我們先把5G終端在不同模式下的頻率誤差要求總結(jié)一下。順便再對(duì)比一下其他系統(tǒng)的要求。
2022-10-31 10:53:581138 摘要:在陣列天線的工程設(shè)計(jì)中,各種形式的誤差影響著天線方向圖。本次推文主要分析理論上的隨機(jī)相位誤差以及量化相位誤差對(duì)陣列方向圖的影響。
2022-11-09 10:45:041094 關(guān)于模數(shù)轉(zhuǎn)換器(ADC),了解雙極性ADC和差分ADC中的失調(diào)誤差和增益誤差以及失調(diào)誤差單點(diǎn)校準(zhǔn)。 在上一篇文章中,我們討論了如何 失調(diào)誤差可能會(huì)影響單極性ADC的傳遞函數(shù)。 考慮到這一點(diǎn),單極
2023-01-27 16:57:005130 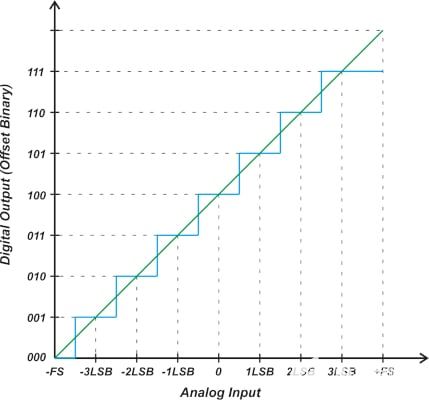
誤差補(bǔ)償技術(shù)分為硬件補(bǔ)償和軟件補(bǔ)償。其中,硬件補(bǔ)償主要是通過(guò)機(jī)床的機(jī)械結(jié)構(gòu)進(jìn)行調(diào)整,減少機(jī)械上的誤差,如制作校正尺補(bǔ)償螺距誤差、制作凸輪校正傳動(dòng)鏈誤差等。硬件補(bǔ)償不適用于隨機(jī)誤差且缺乏柔性。軟件補(bǔ)償是指通過(guò)計(jì)算機(jī)對(duì)所建立的數(shù)學(xué)模型進(jìn)行運(yùn)算后,發(fā)出運(yùn)動(dòng)補(bǔ)償指令,由數(shù)控伺服系統(tǒng)完成誤差補(bǔ)償動(dòng)作。
2023-02-08 11:42:442769 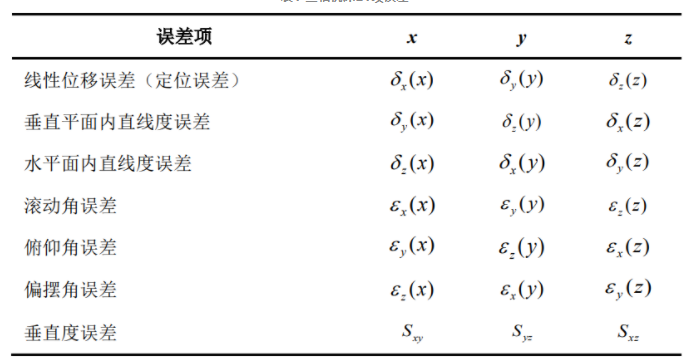
一、電氣測(cè)量誤差的形式 電氣測(cè)量誤差的形式分為絕對(duì)誤差、相對(duì)誤差和引用誤差三種。 1、絕對(duì)誤差 測(cè)量值與被測(cè)量真值之差稱為絕對(duì)誤差。 令測(cè)量值為A x ,測(cè)量真值為A 0 ,絕對(duì)誤差
2023-09-14 11:07:53703 1、絕對(duì)誤差 絕對(duì)誤差是指儀表的指示值A(chǔ) X 與被測(cè)量真值A(chǔ) 0 之間的差值,用符號(hào)Δ表示。即 Δ=A X -A 0 例:用甲、乙兩只電壓表測(cè)負(fù)載電壓,其讀數(shù)分別為202V和199V,而用標(biāo)準(zhǔn)表測(cè)量
2023-09-21 11:20:07997 電子發(fā)燒友網(wǎng)站提供《基于Arm Cortex-M0+的MCU上的ADC增益誤差和失調(diào)誤差校準(zhǔn).pdf》資料免費(fèi)下載
2023-09-25 10:08:470 就拿電子元件—薄膜電容來(lái)說(shuō),雖然買到的薄膜電容是同一批次生產(chǎn)的,但在外界因素和生產(chǎn)環(huán)節(jié)的影響下,同一批次的薄膜電容其電容值與標(biāo)稱電容值是不一樣的,這種情況就稱為誤差。
2023-09-25 17:30:34509 運(yùn)放輸出結(jié)果產(chǎn)生誤差原因有很多,對(duì)于圖中的應(yīng)用來(lái)說(shuō),最主要的2個(gè)誤差源是運(yùn)放的失調(diào)電壓Vos.和運(yùn)放的偏置電流Ib-. 本應(yīng)用中,輸入共模電壓為0V. 故可以忽略共模電壓對(duì)運(yùn)放造成的誤差影響,而且輸出電壓也很小,所以也可以忽略運(yùn)放開(kāi)環(huán)增益對(duì)失調(diào)電壓的影響。
2023-10-18 16:40:28290 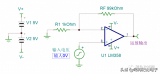
電路設(shè)計(jì)中偏置電流是如何引起誤差的呢? 在電路設(shè)計(jì)中,偏置電流是一種非常重要的參考電流,它被用來(lái)控制電路的工作狀態(tài)。然而,偏置電流也會(huì)引起誤差,這些誤差可能會(huì)對(duì)電路的性能和精度產(chǎn)生不利影響。 偏置
2023-10-30 09:12:08338 直線導(dǎo)軌的誤差匹配度是評(píng)估導(dǎo)軌之間配合精度的重要指標(biāo),導(dǎo)軌之間的配合精度越高,誤差匹配度就會(huì)越好,反之則越差。
2023-10-31 17:48:05620 
相信大部分人在使用運(yùn)放時(shí)會(huì)忽略運(yùn)放的輸入誤差信號(hào)eid,忽略的原因往往是因?yàn)檩斎?b class="flag-6" style="color: red">誤差信號(hào)eid所引起的輸出電壓誤差很小,對(duì)實(shí)驗(yàn)或者項(xiàng)目本身影響不大。
2023-11-02 10:07:57815 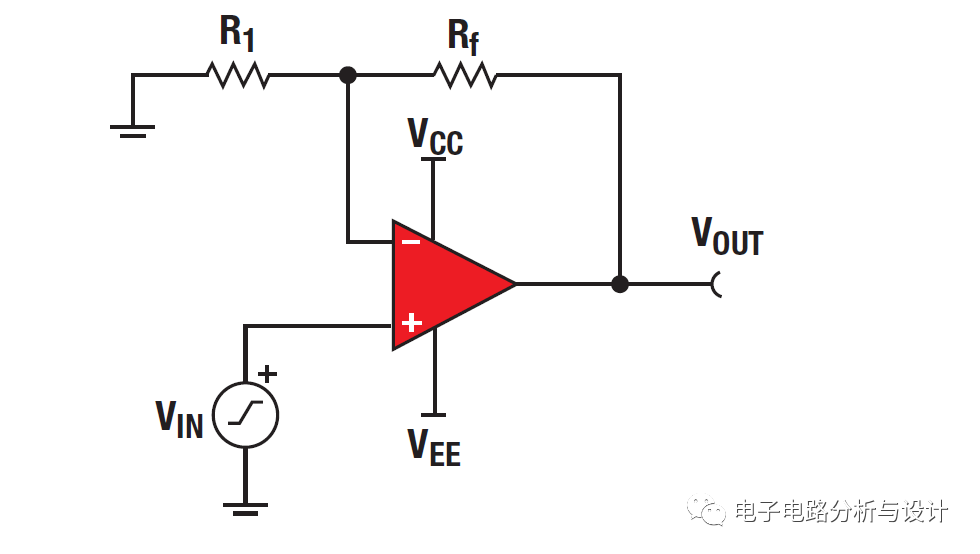
后驗(yàn)誤差按照實(shí)現(xiàn)方式,可以分為:基于恢復(fù)梯度的后驗(yàn)誤差;基于殘差的后驗(yàn)誤差;基于物理場(chǎng)規(guī)律的后驗(yàn)誤差;以及試測(cè)的基于純粹梯度的后驗(yàn)誤差。
2023-11-08 12:33:47302 
噪聲分析、誤差分析中,什么類型的噪聲、誤差可以用均方根計(jì)算?什么類型的噪聲需要直接加在總噪聲中? 在噪聲分析和誤差分析中,我們常常使用均方根(Root Mean Square, RMS)來(lái)計(jì)算和描述
2023-11-09 09:50:50700 負(fù)反饋放大電路是一種常用的電子放大器電路,在實(shí)際的應(yīng)用中存在著誤差。本文將對(duì)負(fù)反饋放大電路的誤差來(lái)源進(jìn)行分析,包括輸入誤差、放大器內(nèi)部誤差以及反饋誤差,并探討各種誤差對(duì)放大電路性能的影響。 首先是
2023-12-01 11:51:161749 元器件的誤差百分比 元器件的誤差百分比在電子行業(yè)中扮演著重要的角色。無(wú)論是在電子產(chǎn)品的設(shè)計(jì)、制造還是維修過(guò)程中,我們都需要考慮元器件的誤差百分比對(duì)電路性能的影響。下面,我將從何為元器件的誤差百分比
2023-12-20 10:46:32234 伺服位置誤差大的原因及解決方法 伺服電機(jī)是一種精密控制裝置,可以實(shí)現(xiàn)高精度、高穩(wěn)定性的位置控制。然而,伺服電機(jī)在使用過(guò)程中常常出現(xiàn)定位誤差過(guò)大的問(wèn)題。本文將從機(jī)械結(jié)構(gòu)、控制系統(tǒng)、環(huán)境因素、測(cè)量誤差
2023-12-25 13:57:521844 AD轉(zhuǎn)換器具有很高的精度和準(zhǔn)確性,但它們?nèi)匀粫?huì)存在誤差。本文將詳細(xì)探討AD轉(zhuǎn)換器產(chǎn)生誤差的原因。 第一,量化誤差是AD轉(zhuǎn)換器最主要的誤差源之一。當(dāng)模擬信號(hào)被離散化為數(shù)字信號(hào)時(shí),模擬信號(hào)的連續(xù)幅度范圍會(huì)被劃分為一系列的離散量化級(jí)別。量化誤差是指模擬信號(hào)的實(shí)際值與離
2024-01-09 11:02:48455 漂移誤差、隨機(jī)誤差、系統(tǒng)誤差這三種誤差到底是怎么引發(fā)的?如何對(duì)矢量網(wǎng)絡(luò)分析儀校準(zhǔn)呢? 漂移誤差、隨機(jī)誤差和系統(tǒng)誤差是在矢量網(wǎng)絡(luò)分析儀(簡(jiǎn)稱VNA)測(cè)量過(guò)程中可能出現(xiàn)的三種誤差類型。它們的引發(fā)原因和解
2024-01-19 15:42:16203 應(yīng)變片產(chǎn)生溫度誤差的原因及減小或補(bǔ)償溫度誤差的方法是什么? 溫度誤差是指應(yīng)變片在測(cè)量過(guò)程中所得到的溫度與實(shí)際溫度之間的差異。應(yīng)變片產(chǎn)生溫度誤差的原因有很多,主要包括材料的熱膨脹、溫度梯度引起的位移
2024-02-04 17:31:04810
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論