交流伺服系統(tǒng)包含交流伺服驅(qū)動(dòng)器和伺服電機(jī)。選用伺服系統(tǒng),主要為了進(jìn)行精密的定位控制,伺服驅(qū)動(dòng)器在位置控制模式下運(yùn)行,控制框圖如圖一所示。
2022-12-05 10:03:41 1734
1734 測試AD2S83芯片過程中發(fā)現(xiàn),當(dāng)輸入的信號由180°瞬時(shí)變至0°時(shí),AD2S83仍然輸出180°,使用示波器測量輸入的參考信號、余弦信號和正弦信號,發(fā)現(xiàn)信號正常,但AD2S83輸出的值保持180°。其他角度90°和270°不存在該問題。從181°順變值1°時(shí)也不存在該問題。
2018-08-07 08:06:24
測試AD2S83芯片過程中發(fā)現(xiàn),當(dāng)輸入的信號由180°瞬時(shí)變至0°時(shí),AD2S83仍然輸出180°,使用示波器測量輸入的參考信號、余弦信號和正弦信號,發(fā)現(xiàn)信號正常,但AD2S83輸出的值保持180°。其他角度90°和270°不存在該問題。從181°順變值1°時(shí)也不存在該問題。
2023-12-12 07:13:25
伺服系統(tǒng)的定義伺服系統(tǒng)是用來精確地跟隨或復(fù)現(xiàn)某個(gè)過程的反饋控制系統(tǒng)。它的主要任務(wù)是按控制命令的要求、對功率進(jìn)行放大、變換與調(diào)控等處理,使驅(qū)動(dòng)裝置輸出的力矩、速度和位置控制非常靈活方便。伺服系統(tǒng)定位
2023-03-08 09:37:19
伺服系統(tǒng)控制框架是由哪些部分組成的?伺服系統(tǒng)控制包括哪些參數(shù)?
2021-10-11 09:05:11
伺服系統(tǒng)的發(fā)展趨勢1、交流化伺服技術(shù)將繼續(xù)迅速地由DC伺服系統(tǒng)轉(zhuǎn)向AC伺服系統(tǒng)。從目前國際市場的情況看,幾乎所有的新產(chǎn)品都是AC伺服系統(tǒng)。在工業(yè)發(fā)達(dá)國家,AC伺服電機(jī)的 市場占有率已經(jīng)超過80
2021-09-10 07:56:26
伺服系統(tǒng)有哪幾種控制方式?伺服系統(tǒng)的工作原理是什么?有哪些性能?
2021-09-23 08:39:15
伺服系統(tǒng)由哪幾部分組成?伺服系統(tǒng)常用的參數(shù)有哪些?如何選擇伺服電機(jī)?伺服驅(qū)動(dòng)器控制原理是什么?
2021-09-26 08:26:53
完全數(shù)字化的伺服系統(tǒng)。全數(shù)字化的實(shí)現(xiàn),將原有的硬件伺服控制變成了軟件伺服控制,從而使在伺服系統(tǒng)中應(yīng)用現(xiàn)代控制理論的先進(jìn)算法(如:最優(yōu)控制、人工智能、模糊控制、神經(jīng)元網(wǎng)絡(luò)等)成為可能。 (3)采用新型
2019-06-24 05:00:50
伺服系統(tǒng)國內(nèi)外研究現(xiàn)狀如何?伺服系統(tǒng)的發(fā)展趨勢是怎樣的?伺服系統(tǒng)相關(guān)技術(shù)是什么?
2021-09-30 07:29:16
伺服系統(tǒng)的機(jī)械時(shí)間常數(shù)是什么?伺服系統(tǒng)的電氣時(shí)間常數(shù)是什么?求大神解答
2021-09-30 08:16:25
機(jī)器人是如何實(shí)現(xiàn)運(yùn)作的?伺服系統(tǒng)的特點(diǎn)和功用是什么?
2021-11-15 07:25:50
利用周期性的正余弦位置指令和轉(zhuǎn)矩指令實(shí)現(xiàn)轉(zhuǎn)動(dòng)慣量離線辨識(shí)。 李俊 電機(jī)與控制應(yīng)用 1 伺服系統(tǒng)動(dòng)力學(xué)模型 伺服電機(jī)的運(yùn)動(dòng)方程為 2 傳統(tǒng)轉(zhuǎn)動(dòng)慣量離線辨識(shí)算法的局限性 式(1)中,可以通過測量得到
2023-03-01 13:59:53
伺服系統(tǒng)的組成交流永磁同步伺服驅(qū)動(dòng)器主要有伺服控制單元、功率驅(qū)動(dòng)單元、通訊接口單元、伺服電動(dòng)機(jī)及相應(yīng)的反饋檢測器件組成,其結(jié)構(gòu)組成如圖1所示。其中伺服控制單元包括位置控制器、速度控制器、轉(zhuǎn)矩和電流
2021-07-12 09:22:02
交流伺服電機(jī)的工作原理伺服系統(tǒng)的組成及分類伺服馬達(dá)(交流)的特點(diǎn)伺服控制的選型步驟
2021-02-22 07:55:20
伺服系統(tǒng)配件有哪些?如何去安裝伺服系統(tǒng)?伺服驅(qū)動(dòng)器與伺服電機(jī)是如何進(jìn)行連接的?漏電開關(guān)有接地和沒接地的區(qū)別在哪?
2021-06-28 07:05:32
優(yōu)點(diǎn),在一些非線性和約束問題求解中該方法表現(xiàn)出一定優(yōu)越性[2]。本文采用粒子群優(yōu)化算法來優(yōu)化設(shè)計(jì)永磁同步電機(jī)伺服系統(tǒng)的控制器,以期取得更好的控制性能。[hide] [/hide]
2009-05-17 11:38:44
,在精度要求不太高的場合中得到較廣泛的應(yīng)用。 2.閉環(huán)控制系統(tǒng) 因?yàn)殚_環(huán)系統(tǒng)的精度不能很好地滿足數(shù)控機(jī)床的要求,所以為了保證精度,最根本的辦法是采用閉環(huán)控制方式。閉環(huán)控制系統(tǒng)是采用直線型位置檢測
2023-03-21 17:53:51
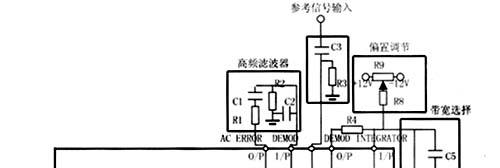
使用AD2S83進(jìn)行旋轉(zhuǎn)變壓器的角度與角速度采集,外圍電路中R6選用的是300k的電阻,C7選用150pF,R7選用3k,C6選用390pF,在常溫正常情況下,電路工作正常,但是在低溫-10度
2023-12-07 07:26:09
基于Labview的氣動(dòng)伺服系統(tǒng)辨識(shí)程序,哪位朋友做過的幫幫忙,搭建的系統(tǒng)跟論文《基于 LabVIEW 的氣動(dòng)比例伺服系統(tǒng)模型辨識(shí)研究》中的模型一樣。
2016-04-19 15:56:52
8 基于Simulink的伺服系統(tǒng)仿真一、實(shí)驗(yàn)?zāi)康?、掌握Simulink的工作環(huán)境及SimPowerSystems功能模塊庫的應(yīng)用;2、掌握Simulink的電力電子電路建模和仿真方法;3、掌握Si...
2021-09-17 08:31:27
如何用STM32控制一個(gè)三軸伺服系統(tǒng)?
2021-09-26 08:56:25
變頻器是什么?伺服系統(tǒng)又是什么?變頻器與伺服系統(tǒng)的工作原理是什么?變頻器與伺服系統(tǒng)有什么共同點(diǎn)?變頻器與伺服系統(tǒng)的區(qū)別在哪些地方?
2021-07-05 06:43:48
怎么實(shí)現(xiàn)伺服系統(tǒng)中的濾波器?
2021-10-09 06:27:28
和伺服機(jī)構(gòu)控制的重要部分。因而要了解機(jī)器人的運(yùn)作過程,必然繞不過伺服系統(tǒng)。伺服系統(tǒng)伺服系統(tǒng)是以變頻技術(shù)為基礎(chǔ)發(fā)展起來的產(chǎn)品,是一種以機(jī)械位置或角度作為控制對象的自動(dòng)控制系統(tǒng)。伺服系統(tǒng)除了可以進(jìn)行速度與轉(zhuǎn)矩控制
2018-10-12 11:01:08
剛性、慣量、響應(yīng)時(shí)間及伺服增益調(diào)整之間的關(guān)系 淺析伺服系統(tǒng)應(yīng)用中的慣量匹配問題-慣量匹配
2021-09-07 07:01:27
在電機(jī)控制的變頻伺服系統(tǒng)中,電流傳感器的采樣精度和實(shí)時(shí)性很大程度上決定了系統(tǒng)的動(dòng)、靜態(tài)性能。精確的電流檢測是提高系統(tǒng)控制精度、穩(wěn)定性和快速性的重要環(huán)節(jié),也是實(shí)現(xiàn)高性能閉環(huán)控制系統(tǒng)的關(guān)鍵。同時(shí),當(dāng)電機(jī)發(fā)生堵轉(zhuǎn)或負(fù)載過重時(shí),系統(tǒng)通過電流傳感器檢測到線路上發(fā)生過流,可以驅(qū)動(dòng)IPM模塊實(shí)現(xiàn)關(guān)斷保護(hù)功能。
2020-05-01 08:34:25
仿真研究。文獻(xiàn)[ 2 ] 研究了基于RBFNN 的PID控制在電液位置伺服系統(tǒng)中的應(yīng)用。文獻(xiàn)[ 3 ]對電液位置伺服系統(tǒng)采用滑模變結(jié)構(gòu)控制, 用最優(yōu)控制理論設(shè)計(jì)滑模平面, 均取得了良好效果。但大量文獻(xiàn)
2019-08-21 06:13:08
相連的兩根或多根轉(zhuǎn)軸自動(dòng)地保持相同的轉(zhuǎn)角變化,或同步旋轉(zhuǎn)。電機(jī)的這種性能稱為自整步特性。在伺服系統(tǒng)中,產(chǎn)生信號一方所用的自整角機(jī)稱為發(fā)送機(jī),接收信號一方所用自整角機(jī)稱為接收機(jī)。自整角機(jī)廣泛應(yīng)用于冶金、航海等位置和方位同步指示系統(tǒng)和火炮、雷達(dá)等伺服系統(tǒng)中。
2019-06-12 04:20:21
請問哪位大佬有伺服系統(tǒng)中電流環(huán)的PI參數(shù)計(jì)算的實(shí)現(xiàn)方案?求分享
2021-10-13 08:05:22
如何實(shí)現(xiàn)軸角編碼器在伺服系統(tǒng)中的應(yīng)用?ZSZ數(shù)字化軸角編碼器模擬速度反饋信號的處理方法是什么?怎么進(jìn)行ZSZ軸角編碼器數(shù)字位置信號的采集和遠(yuǎn)距離傳輸?
2021-04-20 06:49:44
電流傳感器是伺服控制必不可少的一部分,小功率系統(tǒng)可采用霍爾電流傳感器。通過ADC將模擬信號轉(zhuǎn)換成數(shù)字信號,然后參于數(shù)字伺服控制。本文主要介紹一款集成型霍爾電流傳感器MLX91210在伺服系統(tǒng)中的應(yīng)用要點(diǎn)及案例分析。
2020-05-08 06:16:23
數(shù)控機(jī)床的伺服系統(tǒng)一、 伺服系統(tǒng)的組成 數(shù)控機(jī)床的伺服系統(tǒng)按其功能可分為:進(jìn)給伺服系統(tǒng)和主軸伺服系統(tǒng)。 主軸伺服系統(tǒng)用于
2008-12-30 16:12:52 60
60 本章將詳細(xì)討論進(jìn)給伺服系統(tǒng)的軟件硬件結(jié)構(gòu);進(jìn)給伺服系統(tǒng)基本功能的原理及實(shí)現(xiàn)方法。進(jìn)給伺服系統(tǒng)是數(shù)控系統(tǒng)主要的子系統(tǒng)。如果說CNC裝置是數(shù)控系統(tǒng)的“大腦”,是發(fā)布
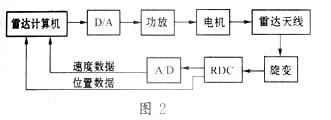
2009-02-16 00:21:310 伺服系統(tǒng)是雷達(dá)的重要組成部分,它對于搜索目標(biāo)、跟蹤目標(biāo)以及精確測量目標(biāo)的位置和其它參數(shù)起著重要作用,將性能優(yōu)良的模擬伺服系統(tǒng)進(jìn)行數(shù)字化,不僅可以繼承原模擬系統(tǒng)的優(yōu)
2009-04-21 15:33:0619 位置伺服系統(tǒng)中先由位置給定量與反饋量的差值經(jīng)過位置調(diào)節(jié)器的調(diào)節(jié)產(chǎn)生速度給定量,再由速度給定量與速度反饋量的差值經(jīng)過速度調(diào)節(jié)器的作用最終實(shí)現(xiàn)準(zhǔn)確的定位。由上述位
2009-07-02 08:53:3719 基于PMSM伺服系統(tǒng)的數(shù)學(xué)模型及其性能分析:在數(shù)控機(jī)床中,以交流永磁同步伺服電動(dòng)機(jī)(PMSM)為驅(qū)動(dòng)元件的伺服系統(tǒng)是數(shù)控裝置與機(jī)床之間的中間連接環(huán)節(jié)。文中討論P(yáng)MSM及其驅(qū)動(dòng)
2009-07-05 19:37:2844 轉(zhuǎn)角-線位移式全閉環(huán)位置伺服系統(tǒng)及誤差分析::在一些精度要求比較高的應(yīng)用場合,半閉環(huán)的位置伺服系統(tǒng)不能滿足要求。文中提出采用轉(zhuǎn)角-線位移式全閉環(huán)位置控制方法,光柵
2009-07-05 21:34:2121 對于感應(yīng)電機(jī),現(xiàn)在大多數(shù)的無位置傳感器伺服系統(tǒng)采用磁通積分法、波形檢測法等,但精度較差,且容易受到干擾。文章提供了一種基于Kalman 濾波的無位置傳感器感應(yīng)電機(jī)伺服系統(tǒng),
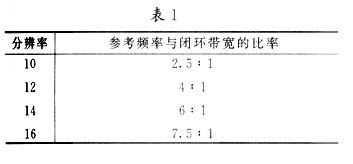
2009-07-07 08:46:5123 本文介紹了一種基于旋轉(zhuǎn)變壓器-數(shù)字轉(zhuǎn)換器芯片AD2S83 和DSP 的感應(yīng)同步器測角系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)。本設(shè)計(jì)中通過RC 振蕩電路為感應(yīng)同步器轉(zhuǎn)子提供單相激磁信號,定子上感應(yīng)出來
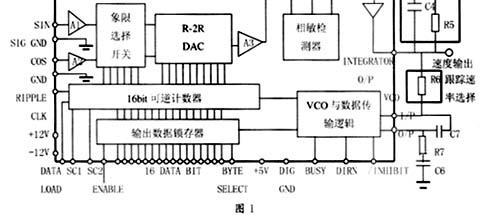
2009-08-14 17:08:2436 旋轉(zhuǎn)變壓器—數(shù)字轉(zhuǎn)換器AD2S83 在伺服系統(tǒng)中的應(yīng)用
在伺服系統(tǒng)中,需要實(shí)時(shí)地檢測出電機(jī)轉(zhuǎn)子的位置,包括轉(zhuǎn)子的絕對位置和增量式位置,同時(shí)還需檢測出
2009-11-26 11:45:4255 低速位置伺服系統(tǒng)中的非線性摩擦力、參數(shù)攝動(dòng)以及外部擾動(dòng)等因素都會(huì)降低系統(tǒng)的精度. 本文對無刷直流電機(jī)低速位置伺服控制方法進(jìn)行了研究. 簡要介紹了自抗擾控制器,利用Stribe
2010-03-01 16:31:4443 伺服系統(tǒng)的PID控制
伺服系統(tǒng)的摩擦動(dòng)態(tài)特性是非常復(fù)雜的,目前已經(jīng)提出了許多摩擦模型。
2010-05-04 16:05:5351 鑒幅式伺服系統(tǒng)的工作原理
圖5--25是鑒幅式伺服系統(tǒng)的方框圖。該系統(tǒng)由測量元件及信號處理線路、數(shù)模轉(zhuǎn)換器、比較器、驅(qū)動(dòng)環(huán)節(jié)
2009-05-06 23:52:592090 
【摘 要】 在無刷直流電動(dòng)機(jī)驅(qū)動(dòng)的雷達(dá)伺服系統(tǒng)中,采用了智能功率驅(qū)動(dòng)模塊(IPM)來實(shí)現(xiàn)功率驅(qū)動(dòng),它能夠滿足苛刻的環(huán)境要求,并能獲得比較滿意的系統(tǒng)性能。
2009-05-16 19:28:45948 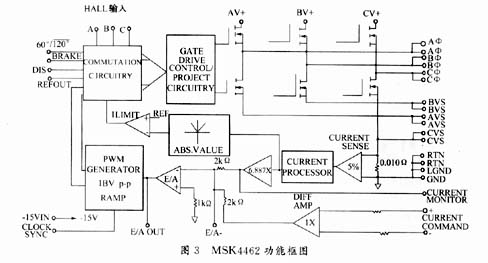
雙路伺服系統(tǒng)電路圖
2009-06-20 11:16:41444 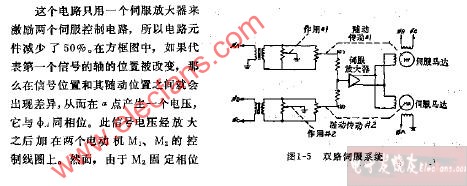
全數(shù)字伺服系統(tǒng)中位置環(huán)和電子齒輪的設(shè)計(jì)
摘要:分析了伺服系統(tǒng)中位置環(huán)和電子齒輪的工作原理,同時(shí)介紹了一種
2009-07-11 09:44:26992 
隨著計(jì)算機(jī)技術(shù)和現(xiàn)場總線技術(shù)的發(fā)展和成熟,也促使伺服系統(tǒng)的實(shí)現(xiàn)方式和體系結(jié)構(gòu)在不斷地發(fā)展,將現(xiàn)場總線應(yīng)用于運(yùn)動(dòng)控制,構(gòu)成分布式控制的數(shù)字控制伺服系統(tǒng)日益受到人們的重視。基于現(xiàn)場總線的分布式伺服系統(tǒng)有很多優(yōu)點(diǎn),如連線少、可靠性高、易于系統(tǒng)的維
2011-01-19 10:19:111513 
傳統(tǒng) PID控制 在伺服系統(tǒng)高精度位置跟蹤和改善系統(tǒng)品質(zhì)方面已露出諸多不足,且系統(tǒng)中存在的控制干擾和測量噪聲會(huì)在很大程度上影響伺服系統(tǒng)的跟蹤精度。提出一種帶有卡爾曼濾波器
2011-07-06 16:05:35114 伺服系統(tǒng)按其驅(qū)動(dòng)元件劃分,有步進(jìn)式伺服系統(tǒng)、直流電動(dòng)機(jī)伺服系統(tǒng)、交流電動(dòng)機(jī)伺服系統(tǒng)。按控制方式劃分,有開環(huán)伺服系統(tǒng)、閉環(huán)伺服系統(tǒng)和半閉環(huán)伺服系統(tǒng)等。
2011-07-10 17:15:042298 
伺服系統(tǒng)脈沖控制電路將產(chǎn)生用來控 制伺服系統(tǒng) 的脈沖。圖示的組件顯示這個(gè)伺服系統(tǒng)應(yīng)該產(chǎn)生一個(gè)90的總旋轉(zhuǎn)。
2011-11-03 16:33:193474 用液壓元件組成的伺服系統(tǒng)(什么是伺服系統(tǒng))稱為液壓伺服系統(tǒng),并且液壓伺服系統(tǒng)具有易于實(shí)現(xiàn)直線運(yùn)動(dòng)的速度位移及力控制,驅(qū)動(dòng)力、力矩和功率大,尺寸小重量輕,加速性能好,響
2012-02-09 10:05:337074 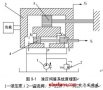
以TMS320F28335為核心,設(shè)計(jì)了一種高可靠性的雷達(dá)伺服系統(tǒng)。描述了伺服系統(tǒng)的組成及其工作原理,重點(diǎn)討論了伺服控制器的設(shè)計(jì),分析系統(tǒng)的安全控制策略,并給出具體實(shí)現(xiàn)的控制電路
2013-01-31 14:41:5082 針對傳統(tǒng)方法難以整定船載雷達(dá)伺服系統(tǒng)PID參數(shù)的問題,將模糊參數(shù)自整定PID控制技術(shù)應(yīng)用到伺服系統(tǒng)位置回路中,通過仿真實(shí)驗(yàn)表明該方法可以不依賴系統(tǒng)的數(shù)學(xué)模型,而根據(jù)輸入輸
2013-07-25 17:47:0328 伺服系統(tǒng)的PID控制技術(shù)下載
伺服系統(tǒng)的PID控制技術(shù)下載
2015-12-09 16:46:538 教學(xué)雷達(dá)伺服系統(tǒng)設(shè)計(jì)與制,教學(xué)雷達(dá)伺服系統(tǒng)設(shè)計(jì)與制作
2016-01-04 15:26:5818 位置伺服系統(tǒng)PID控制策略研究與應(yīng)用-2010。
2016-04-01 14:49:5617 交流永磁伺服系統(tǒng)技術(shù)講座第六講_九_(tái)交流永磁伺服系統(tǒng)的控制策略
2016-04-26 10:47:089 交流永磁伺服系統(tǒng)技術(shù)講座第六講_七_(dá)交流永磁伺服系統(tǒng)的控制策略
2016-04-26 10:47:0821 交流永磁伺服系統(tǒng)技術(shù)講座第六講_十_交流永磁伺服系統(tǒng)的控制策略
2016-04-26 10:47:0810 交流永磁伺服系統(tǒng)技術(shù)講座第六講_十二_交流永磁伺服系統(tǒng)的控制策略。
2016-04-26 10:47:0818 交流永磁伺服系統(tǒng)技術(shù)講座第四講_伺服系統(tǒng)的組成_三_
2016-04-26 10:47:0818 變加減速算法在位置伺服系統(tǒng)中的應(yīng)用與分析
2016-05-04 14:37:0110 電液伺服系統(tǒng)位置和力模糊切換控制方法_高炳微
2017-01-07 17:01:100 模糊控制及其在液壓伺服系統(tǒng)中的應(yīng)用_余兵
2017-02-07 16:59:251 步進(jìn)電機(jī)伺服系統(tǒng)是典型的開環(huán)控制系統(tǒng),指令信號是單向流動(dòng)的。開環(huán)系統(tǒng)沒有位置和速度反饋回路,省去了檢測裝置,其精度主要由步進(jìn)電機(jī)來決定,速度也受到步進(jìn)電機(jī)性能的限制,系統(tǒng)簡單可靠,不需要像閉環(huán)伺服系統(tǒng)那樣進(jìn)行復(fù)雜的設(shè)計(jì)計(jì)算與試驗(yàn)驗(yàn)證。
2017-06-12 15:32:5815216 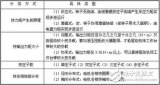
伺服系統(tǒng),亦稱隨動(dòng)系統(tǒng),是一種能夠跟蹤輸入的指令信號進(jìn)行動(dòng)作,從而獲得精確的位置、速度或力輸出的自動(dòng)控制系統(tǒng)。大多數(shù)伺服系統(tǒng)具有檢測反饋回路,因而伺服系統(tǒng)是一種反饋控制系統(tǒng)。
2017-06-12 16:01:227151 根據(jù)伺服系統(tǒng)的特點(diǎn)并結(jié)合PID控制算法設(shè)計(jì)了一種位置前饋控制器
2017-09-16 09:08:2120 基于DSP控制的電液位置伺服系統(tǒng)電模擬仿真研究
2017-10-19 14:33:268 以快速、精確跟蹤為主要目標(biāo)的位置伺服系統(tǒng),是現(xiàn)代高科技各領(lǐng)域中不可缺少、應(yīng)用十分廣泛的一種自動(dòng)控制系統(tǒng)。在歷經(jīng)開環(huán)、電氣.液壓、直流電氣伺服的發(fā)展歷程之后,現(xiàn)已進(jìn)入交流電氣伺服迅猛發(fā)展的時(shí)代。本章
2017-11-08 09:59:217 本文開始介紹了伺服系統(tǒng)的概念和伺服系統(tǒng)主要作用,其次闡述了伺服系統(tǒng)的分類與基本要求,最后闡述了伺服系統(tǒng)主要特點(diǎn)和基本組成結(jié)構(gòu)。
2018-03-27 08:43:2418095 本文主要介紹什么是伺服系統(tǒng),首先介紹了伺服系統(tǒng)的結(jié)構(gòu)及特點(diǎn),其次介紹了伺服系統(tǒng)作用、分類及性能要求和參數(shù),最后闡述了伺服系統(tǒng)的發(fā)展趨勢。
2018-04-28 17:08:5632919 本文首先介紹了伺服系統(tǒng)的組成,其次介紹了伺服系統(tǒng)的特點(diǎn)、作用及分類,最后闡述了伺服系統(tǒng)應(yīng)用領(lǐng)域、應(yīng)用趨勢及實(shí)例,具體的跟隨小編一起來了解一下。
2018-05-31 10:35:0315586 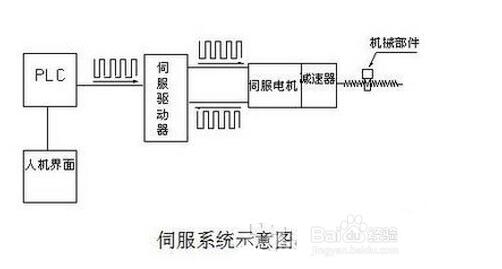
本文首先介紹了伺服系統(tǒng)工作原理及特點(diǎn),其次介紹了伺服系統(tǒng)在數(shù)控機(jī)床的應(yīng)用,最后介紹了數(shù)控伺服系統(tǒng)的作用。
2018-06-01 16:52:2910053 本文首先介紹了液壓伺服系統(tǒng)工作原理及組成,其次介紹了液壓伺服系統(tǒng)分類及工作特點(diǎn),最后介紹了液壓伺服系統(tǒng)的優(yōu)缺點(diǎn),具體的跟隨小編一起來了解一下。
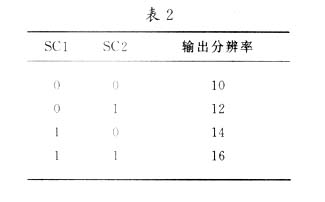
2018-06-04 10:09:4011162 電子發(fā)燒友網(wǎng)為你提供ADI(ti)AD2S83相關(guān)產(chǎn)品參數(shù)、數(shù)據(jù)手冊,更有AD2S83的引腳圖、接線圖、封裝手冊、中文資料、英文資料,AD2S83真值表,AD2S83管腳等資料,希望可以幫助到廣大的電子工程師們。
2019-02-22 12:45:34

伺服系統(tǒng)的執(zhí)行元件
2019-08-09 16:47:2214876 伺服系統(tǒng)(servomechanism)又稱隨動(dòng)系統(tǒng),是用來精確地跟隨或復(fù)現(xiàn)某個(gè)過程的反饋控制系統(tǒng)。伺服系統(tǒng)使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨輸入目標(biāo)(或給定值)的任意變化的自動(dòng)控制系統(tǒng)。
2019-10-30 09:44:475961 
伺服系統(tǒng)是一種自動(dòng)控制系統(tǒng),能使物體的位置、方位、狀態(tài)等輸出被控量跟隨輸入目標(biāo)(或給定值)的變化而變化。伺服驅(qū)動(dòng)器在接收下達(dá)的控制命令后,會(huì)發(fā)出信號給伺服電機(jī)驅(qū)動(dòng)其轉(zhuǎn)動(dòng);
2022-11-07 15:02:5113117 伺服系統(tǒng)的發(fā)展與伺服電機(jī)的發(fā)展緊密相聯(lián),經(jīng)歷了三個(gè)主要發(fā)展階段:20世紀(jì)60年代以前,以步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng)的液壓伺服馬達(dá)或以功率步進(jìn)電動(dòng)機(jī)直接驅(qū)動(dòng)為中心,伺服系統(tǒng)的位置控制為開環(huán)系統(tǒng)。
2022-11-30 12:36:30785 伺服系統(tǒng)的工作原理 伺服系統(tǒng)(servomechanism)又稱隨動(dòng)系統(tǒng),是用來精確地跟隨或復(fù)現(xiàn)某個(gè)過程的反饋控制系統(tǒng)。伺服系統(tǒng)使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨輸入目標(biāo)(或給定值)的任意
2023-02-08 14:11:461781 交流伺服系統(tǒng)通常由以下幾個(gè)主要組成部分構(gòu)成:
交流伺服電機(jī):交流伺服電機(jī)是伺服系統(tǒng)的核心部件之一,它的轉(zhuǎn)速、力矩和位置等運(yùn)動(dòng)狀態(tài)能夠受到精密控制。常用的交流伺服電機(jī)有感應(yīng)電機(jī)和永磁同步電機(jī)等。
2023-03-07 14:15:362659 交流伺服系統(tǒng)按照電機(jī)類型的不同可以分為兩種:異步伺服系統(tǒng)和同步伺服系統(tǒng)。根據(jù)控制器的不同,交流伺服系統(tǒng)又可以分為模擬伺服系統(tǒng)和數(shù)字伺服系統(tǒng)。
2023-03-07 14:20:44948 機(jī)電伺服系統(tǒng)廣泛應(yīng)用于各種機(jī)械設(shè)備中,其種類和形式多種多樣。以下列舉一些常見的機(jī)電伺服系統(tǒng):
伺服電機(jī)系統(tǒng):伺服電機(jī)系統(tǒng)是一種利用電機(jī)控制機(jī)械運(yùn)動(dòng)的伺服系統(tǒng),它通常包括電機(jī)、編碼器、控制器
2023-03-07 14:31:081421 伺服系統(tǒng)指經(jīng)由閉環(huán)控制方式達(dá)到對一個(gè)機(jī)械系統(tǒng)的位置、速度和加速度的控制。
一個(gè)伺服系統(tǒng)的構(gòu)成包括被控對象、執(zhí)行器和控制器(負(fù)載、伺服電動(dòng)機(jī)和功率放大器、控制器和反饋裝置)。
1. 執(zhí)行器的功能
2023-05-16 14:46:430 電子發(fā)燒友網(wǎng)站提供《用Stylophone控制伺服系統(tǒng):音高檢測.zip》資料免費(fèi)下載
2023-07-11 14:40:390 伺服系統(tǒng)主要由伺服控制器、驅(qū)動(dòng)電路、伺服電動(dòng)機(jī)及相應(yīng)反饋檢測器件組成。1.伺服系統(tǒng)原理當(dāng)人為的給定控制信號并被伺服控制系統(tǒng)接收時(shí),執(zhí)行機(jī)構(gòu)就會(huì)按照控制信號的指令進(jìn)行一系列的運(yùn)動(dòng)和動(dòng)作;如果不再
2023-08-27 08:08:421724 
伺服系統(tǒng)主要由伺服驅(qū)動(dòng)器、編碼器和伺服電機(jī)等部件構(gòu)成。伺服系統(tǒng)是一種自動(dòng)控制系統(tǒng),能使物體的位置、方位、狀態(tài)等輸出被控量跟隨輸入目標(biāo)(或給定值)的變化而變化。伺服驅(qū)動(dòng)器在接收下達(dá)的控制命令后,會(huì)發(fā)
2023-08-27 08:08:511258 伺服系統(tǒng)(servomechanism)又稱 隨動(dòng)系統(tǒng) ,是用來精確地跟隨或復(fù)現(xiàn)某個(gè)過程的反饋控制系統(tǒng)。伺服系統(tǒng)使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨輸入目標(biāo)(或給定值)的任意變化
2023-09-27 10:30:361293 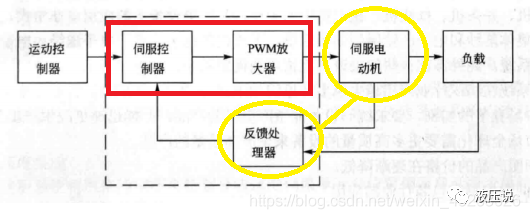
針對高動(dòng)態(tài)性能、高穩(wěn)態(tài)精度的伺服系統(tǒng),設(shè)計(jì)了有限時(shí)間位置控制器,實(shí)現(xiàn)了系統(tǒng)在變化的位置指令下,柔順地從當(dāng)前位置運(yùn)動(dòng)至目標(biāo)位置。
2023-10-18 11:39:47455 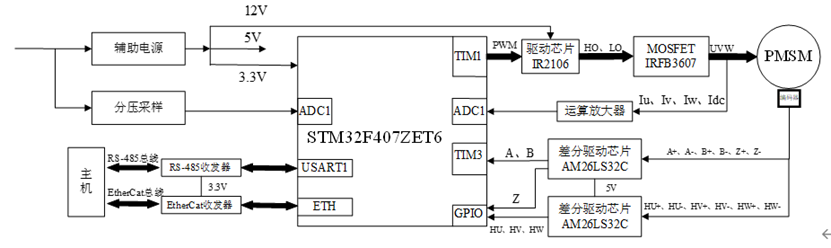
按傳遞信號(指輸入和偏差信號)的元件不同可分為:①電液伺服系統(tǒng)(傳遞信號的元件為電氣元件);②機(jī)液伺服系統(tǒng)(傳遞信號的元件是機(jī)械裝置);③氣液伺服系統(tǒng)(傳遞信號的元件是氣動(dòng)元件)。
2023-11-01 09:36:01401 交流伺服系統(tǒng)的分類及應(yīng)用場合交流伺服系統(tǒng)按照電機(jī)類型的不同可以分為兩種:異步伺服系統(tǒng)和同步伺服系統(tǒng)。根據(jù)控制器的不同,交流伺服系統(tǒng)又可以分為模擬伺服系統(tǒng)和數(shù)字伺服系統(tǒng)。異步伺服系統(tǒng):異步伺服系統(tǒng)
2023-11-03 08:07:41521 伺服系統(tǒng)(servomechanism)又稱隨動(dòng)系統(tǒng),是用來精確地跟隨或復(fù)現(xiàn)某個(gè)過程的反饋控制系統(tǒng)。伺服系統(tǒng)使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨輸入目標(biāo)(或給定值)的任意變化的自動(dòng)控制系統(tǒng)
2023-12-05 10:25:03478
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論