 電子發燒友App
電子發燒友App


【摘 要】介紹了通過圖像處理方法實現傳送帶上運動物體的圖像恢復及幾何參數測量,并將其應用到羽毛球生產中毛片的在線彎度、粗細測量中。詳細敘述了線性運動圖像恢復的原理、幾何參數計算方法及改進措施,最后給出了實現系統方案和測量的結果。
?? 關鍵詞:視頻捕捉 圖像恢復 在線測量
1 引 言
在自動化生產過程中,傳送帶和物流系統是生產線的重要組成部分。通常情況下為了實現物品的分類處理或完成產品的質量控制等,我們需要了解物品的某些細節情況如幾何參數,因此,基于圖像處理的測量方法得到越來越多的應用。測量方式主要有靜態和動態兩種,靜態是指目標對象相對攝像機靜止,用這種方式可以獲得清晰的圖像,而動態方式下則得不到清晰的圖像。
在某些場合下,無法獲得靜態圖像,而運動目標的成像又會造成圖像質量的下降, 為避免出現圖像的降質,或者考慮到其它因素如機械傳動系統、運動特性等,我們一般采用運動狀態下的圖像捕捉和處理的方法。雖然采用平穩運動系統可以減少傳動過程中的振動,提高系統的運轉效率,簡化系統的設計,但同時圖像處理的時間也會加長。
本文將動態的圖像測量方法應用于羽毛球生產過程中的毛片彎度等參數的測量,介紹了整個系統的組成和運行的情況,并提供了過程的主要結果。
2 運動圖像的恢復原理
了解運動圖像的恢復原理,首先應了解圖像的運動模型。
根據Gonzalez水平圖像運動模型〔1〕,設原圖像為f(x,y),在曝光時間T內原圖像沿水平方向移動距離為a,移動速度恒定且曝光線性,則
?
?? 這是一個遞推關系式,說明當前位置的恢復圖像可以由離當前位置a處的恢復圖像推算得出,模糊圖像g(x)的導數總可以求得。只要求出長度為a的圖像,整個圖像都可以根據上述遞推關系獲得。
?? 設m為x/a的整數部分,恢復圖像可以由下式近似得出〔2〕
?? 圖像恢復的質量取決于恢復關系式中各參數的選取。A和γ對恢復圖像的背景和對比有影響,而a對恢復圖像的質量起決定作用。通常情況下采用搜索方法獲得合適的值。在參考文獻〔2〕中采用均方誤差準則下實現自動搜索的方法。本文的測量環境下,由于運動速度恒定,參數a一旦確定后當作一個參數來處理。
3 基于圖像處理的幾何參數計算
3.1 羽毛球毛片參數
羽毛球質量的重要指標是其飛行的穩定性,即在飛行中不出現搖擺或變線。羽毛球飛行的氣動機理十分復雜,這里不作研究。只要能保證形狀相同的毛片插在同一個球上,則在正常工序下生產出來的羽毛球就會具有良好的飛行穩定性。傳統的測量方法不僅速度慢而且夾具對軟性材料的測量結果產生影響。本文嘗試利用圖像捕捉設備對傳送帶上的毛片進行動態捕捉和處理,獲得毛片的形狀參數后按形狀參數分檔,保證具有相同形狀的16根毛片插在同一個羽毛球上。
毛片的主要幾何參數有毛桿的彎度、拱度和毛桿頂部的粗細等。這里的彎度指的是毛桿中心線與其切線在頂部位置處的水平距離,拱度為毛片在平放時的拱高。這里主要介紹彎度的測量方法,先提取毛桿的邊緣并計算中心位置,然后擬合毛桿中心線,最后計算彎度值。在此過程中粗細也同時得出。
3.2 圖像的邊緣提取和邊緣數據的采集
物體的邊緣在圖像上反映出局部特性的不連續性。理想的邊緣有階躍型、房頂型和凸緣型,由于圖像噪聲的存在,實際的邊緣變得十分復雜。
? 邊緣檢測通常采用微分類算子實現。這類算子有Sobel算子、Kirsh算子和Laplacian算子等,前兩個算子為梯度算子,后者為二階微分算子。Sobel梯度算子在兩個方向上選取微分大的值作為其梯度值,顯然當兩個方向上微分值大小相等時梯度的誤差最大;而Kirsh則在八個方向上計算微分并以最大制作為梯度值〔3〕,算子法的計算結果作為邊緣判別的依據;Laplacian算子則是不依賴邊緣方向的二階算子,具有旋轉不變性。
由于微分類算子的固有特性,邊緣檢測都會受到噪聲影響。采用濾波方法可以有效地抑制噪聲的干擾,但同時也給邊緣產生一定程度的鈍化,這種鈍化作用會影響邊緣的提取 ,因此關鍵在于濾波方案的選擇。上述微分類算子都采用了濾波方法 。Sobel算子采用了三點加權平均,當邊緣在水平或豎直方向時,實際的濾波沿著邊緣進行,因此濾波對邊緣的鈍化作用最小;而當邊緣在45°或135°方向時,濾波點與邊緣在方向上相差最大,此時濾波對邊緣的鈍化作用也最大。因此,選擇與邊緣較為一致的核(kernel)能在噪聲抑制和邊緣保持方面獲得滿意的結果。
3.3 毛片參數測量
從圖像處理獲得的毛桿形狀會因為圖像噪聲和測量環節的誤差而帶有毛刺,通過處理得到的毛桿中心往往不光滑而且會出現不連續點。
曲線上某一點的切線用相近兩點的連線來近似。當兩點的距離接近時,連線就可以看作切線。這一方法實現時簡單,但在噪聲環境下測量結果誤差非常大。本文采用的方法是將毛桿中心上采樣得到的有限個點進行曲線擬合,然后從擬合后的曲線獲得某一點的切線,并計算出毛片的彎度。
曲線擬合采用多項式的最小二乘法。對每一根毛桿,沿著Y方向選取N組坐標(Xi ,Yi),以X作為變量,Y為自變量選定曲線的方程為
對上述線性方程組,可獲得多項式系數。
最后要考慮的問題是拱度對彎度的視角修正。每根羽毛都存在不同程度的拱度,而在彎度測量時將毛桿投影在水平面內進行測算,因此不同視角下同一彎度的毛片存在測量值的差異 。視角修正的目的在于還原實際的參數。
4 動態圖像捕捉和幾何參數測量在羽毛分揀中的應用
4.1 測量系統組成
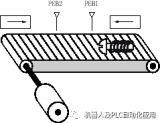
羽毛幾何參數動態測量系統包括以下幾個部分:(1)傳送帶。由穩速電機驅動,使擺放在上面的羽毛能夠以恒定速度平穩進入攝像區域。采用減振機構以減少傳送帶的上下振動。(2)攝像頭和視頻捕捉設備。圖像捕捉部分由攝像頭、捕捉卡和計算機組成。采用480線CCD攝像頭、精工16mm手動光圈鏡頭和LifeView視頻捕捉卡,攝像及捕捉速度為15~30fps,設計傳送帶移動速度為每幀2s。(3)圖像處理軟件及計算機。圖像處理軟件包括運動補償濾波,圖像特征參數提取,毛桿輪廓擬合和圖像參數輸出。計算機采用PⅢ微機。
圖像特征參數來源于毛桿邊緣輪廓及中心位置的提取。邊緣提取采用微分類算子檢測。由于毛桿邊緣方向通常在豎直方向附近的一個小范圍內變化,根據實際毛片的擺放情況毛桿邊緣方向一般在豎直偏左右10°以內,因此采用5×3豎向的條形核。??
?? 毛桿中心線的擬合采用前面敘述的方法,沿毛桿頂部到根部選取15個點,擬合出三階多項式的四個系數。事實上,三階多項式對毛桿的彎度計算已經足夠。
在實時測量中,處理的速度尤為重要,它將影響整個系統的效率和效益。根據上述分析,運動圖像的恢復只需要在有限行進行,這樣能夠減少圖像恢復所需要的時間。
減少計算時間的主要途徑是采用遞推關系。由(4)式可知,恢復圖像是以寬度a分組的,各組內相同位置的點進行累加實現恢復運算。在編程時,開辟a個單元存貯,將會節省大量時間。
為提高處理的速度,在視頻圖像捕捉時將圖像轉存到內存,并由程序訪問已存圖像完成處理運算。這樣可以避免外設訪問,減少一個循環內的處理時間。
?????????????????????
4.2 主要結果
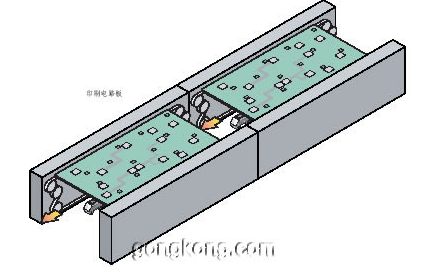
對傳送帶上均勻擺放的毛片進行動態捕捉后獲得模糊的圖像,如圖2所示。捕捉的時刻由傳送帶定位裝置觸發產生。中間部分為恢復后的圖像,這里A取50,a為15。a的大小可以由實驗方法獲得,也可以由估計得出〔4〕。右邊為彎度測量結果的情況 ,實際上用作系統調試時作參考,如鏡頭光圈設定、處理中閾值設定等。在實際應用中,圖像的恢復和參數計算作為一個任務執行,恢復圖像作為中間結果不在屏幕上出現。
在圖像恢復方面,采用前面介紹的圖像恢復方法能夠獲得比較清晰的圖像,但也存在較大的噪聲,這一噪聲顯然與差分運算有關。毛桿的參數測量也會受到噪聲的影響,但在5×3豎向核的濾波作用下將會得到一定程度的改善。黑色背景中存在較大的噪聲,這主要是由CCD的電子噪聲引起的。采用適當的門限值抑制低亮度下的噪聲能夠獲得好的效果。這樣得到的測量結果與靜態條件下的結果較為接近,能滿足毛片參數測量及分揀方面的要求。??????
?????
???
2 陸俊,舒志龍,阮秋琦.基于尺度旋轉的圖像恢復研究.通信學報,2000年7期
3 Castleman K R.DigitalImage Processing.北京:清華大學出版社,1998
4 Tekalp A M.數字視頻處理.北京:電子工業出版社,1998
?? 關鍵詞:視頻捕捉 圖像恢復 在線測量
1 引 言
在自動化生產過程中,傳送帶和物流系統是生產線的重要組成部分。通常情況下為了實現物品的分類處理或完成產品的質量控制等,我們需要了解物品的某些細節情況如幾何參數,因此,基于圖像處理的測量方法得到越來越多的應用。測量方式主要有靜態和動態兩種,靜態是指目標對象相對攝像機靜止,用這種方式可以獲得清晰的圖像,而動態方式下則得不到清晰的圖像。
在某些場合下,無法獲得靜態圖像,而運動目標的成像又會造成圖像質量的下降, 為避免出現圖像的降質,或者考慮到其它因素如機械傳動系統、運動特性等,我們一般采用運動狀態下的圖像捕捉和處理的方法。雖然采用平穩運動系統可以減少傳動過程中的振動,提高系統的運轉效率,簡化系統的設計,但同時圖像處理的時間也會加長。
本文將動態的圖像測量方法應用于羽毛球生產過程中的毛片彎度等參數的測量,介紹了整個系統的組成和運行的情況,并提供了過程的主要結果。
2 運動圖像的恢復原理
了解運動圖像的恢復原理,首先應了解圖像的運動模型。
根據Gonzalez水平圖像運動模型〔1〕,設原圖像為f(x,y),在曝光時間T內原圖像沿水平方向移動距離為a,移動速度恒定且曝光線性,則
?
?? 這是一個遞推關系式,說明當前位置的恢復圖像可以由離當前位置a處的恢復圖像推算得出,模糊圖像g(x)的導數總可以求得。只要求出長度為a的圖像,整個圖像都可以根據上述遞推關系獲得。
?? 設m為x/a的整數部分,恢復圖像可以由下式近似得出〔2〕
?? 圖像恢復的質量取決于恢復關系式中各參數的選取。A和γ對恢復圖像的背景和對比有影響,而a對恢復圖像的質量起決定作用。通常情況下采用搜索方法獲得合適的值。在參考文獻〔2〕中采用均方誤差準則下實現自動搜索的方法。本文的測量環境下,由于運動速度恒定,參數a一旦確定后當作一個參數來處理。
3 基于圖像處理的幾何參數計算
3.1 羽毛球毛片參數
羽毛球質量的重要指標是其飛行的穩定性,即在飛行中不出現搖擺或變線。羽毛球飛行的氣動機理十分復雜,這里不作研究。只要能保證形狀相同的毛片插在同一個球上,則在正常工序下生產出來的羽毛球就會具有良好的飛行穩定性。傳統的測量方法不僅速度慢而且夾具對軟性材料的測量結果產生影響。本文嘗試利用圖像捕捉設備對傳送帶上的毛片進行動態捕捉和處理,獲得毛片的形狀參數后按形狀參數分檔,保證具有相同形狀的16根毛片插在同一個羽毛球上。
毛片的主要幾何參數有毛桿的彎度、拱度和毛桿頂部的粗細等。這里的彎度指的是毛桿中心線與其切線在頂部位置處的水平距離,拱度為毛片在平放時的拱高。這里主要介紹彎度的測量方法,先提取毛桿的邊緣并計算中心位置,然后擬合毛桿中心線,最后計算彎度值。在此過程中粗細也同時得出。
3.2 圖像的邊緣提取和邊緣數據的采集
物體的邊緣在圖像上反映出局部特性的不連續性。理想的邊緣有階躍型、房頂型和凸緣型,由于圖像噪聲的存在,實際的邊緣變得十分復雜。
? 邊緣檢測通常采用微分類算子實現。這類算子有Sobel算子、Kirsh算子和Laplacian算子等,前兩個算子為梯度算子,后者為二階微分算子。Sobel梯度算子在兩個方向上選取微分大的值作為其梯度值,顯然當兩個方向上微分值大小相等時梯度的誤差最大;而Kirsh則在八個方向上計算微分并以最大制作為梯度值〔3〕,算子法的計算結果作為邊緣判別的依據;Laplacian算子則是不依賴邊緣方向的二階算子,具有旋轉不變性。
由于微分類算子的固有特性,邊緣檢測都會受到噪聲影響。采用濾波方法可以有效地抑制噪聲的干擾,但同時也給邊緣產生一定程度的鈍化,這種鈍化作用會影響邊緣的提取 ,因此關鍵在于濾波方案的選擇。上述微分類算子都采用了濾波方法 。Sobel算子采用了三點加權平均,當邊緣在水平或豎直方向時,實際的濾波沿著邊緣進行,因此濾波對邊緣的鈍化作用最小;而當邊緣在45°或135°方向時,濾波點與邊緣在方向上相差最大,此時濾波對邊緣的鈍化作用也最大。因此,選擇與邊緣較為一致的核(kernel)能在噪聲抑制和邊緣保持方面獲得滿意的結果。
3.3 毛片參數測量
從圖像處理獲得的毛桿形狀會因為圖像噪聲和測量環節的誤差而帶有毛刺,通過處理得到的毛桿中心往往不光滑而且會出現不連續點。
曲線上某一點的切線用相近兩點的連線來近似。當兩點的距離接近時,連線就可以看作切線。這一方法實現時簡單,但在噪聲環境下測量結果誤差非常大。本文采用的方法是將毛桿中心上采樣得到的有限個點進行曲線擬合,然后從擬合后的曲線獲得某一點的切線,并計算出毛片的彎度。
曲線擬合采用多項式的最小二乘法。對每一根毛桿,沿著Y方向選取N組坐標(Xi ,Yi),以X作為變量,Y為自變量選定曲線的方程為
對上述線性方程組,可獲得多項式系數。
最后要考慮的問題是拱度對彎度的視角修正。每根羽毛都存在不同程度的拱度,而在彎度測量時將毛桿投影在水平面內進行測算,因此不同視角下同一彎度的毛片存在測量值的差異 。視角修正的目的在于還原實際的參數。
4 動態圖像捕捉和幾何參數測量在羽毛分揀中的應用
4.1 測量系統組成
羽毛幾何參數動態測量系統包括以下幾個部分:(1)傳送帶。由穩速電機驅動,使擺放在上面的羽毛能夠以恒定速度平穩進入攝像區域。采用減振機構以減少傳送帶的上下振動。(2)攝像頭和視頻捕捉設備。圖像捕捉部分由攝像頭、捕捉卡和計算機組成。采用480線CCD攝像頭、精工16mm手動光圈鏡頭和LifeView視頻捕捉卡,攝像及捕捉速度為15~30fps,設計傳送帶移動速度為每幀2s。(3)圖像處理軟件及計算機。圖像處理軟件包括運動補償濾波,圖像特征參數提取,毛桿輪廓擬合和圖像參數輸出。計算機采用PⅢ微機。
圖像特征參數來源于毛桿邊緣輪廓及中心位置的提取。邊緣提取采用微分類算子檢測。由于毛桿邊緣方向通常在豎直方向附近的一個小范圍內變化,根據實際毛片的擺放情況毛桿邊緣方向一般在豎直偏左右10°以內,因此采用5×3豎向的條形核。??
?? 毛桿中心線的擬合采用前面敘述的方法,沿毛桿頂部到根部選取15個點,擬合出三階多項式的四個系數。事實上,三階多項式對毛桿的彎度計算已經足夠。
在實時測量中,處理的速度尤為重要,它將影響整個系統的效率和效益。根據上述分析,運動圖像的恢復只需要在有限行進行,這樣能夠減少圖像恢復所需要的時間。
減少計算時間的主要途徑是采用遞推關系。由(4)式可知,恢復圖像是以寬度a分組的,各組內相同位置的點進行累加實現恢復運算。在編程時,開辟a個單元存貯,將會節省大量時間。
為提高處理的速度,在視頻圖像捕捉時將圖像轉存到內存,并由程序訪問已存圖像完成處理運算。這樣可以避免外設訪問,減少一個循環內的處理時間。
?????????????????????
4.2 主要結果
對傳送帶上均勻擺放的毛片進行動態捕捉后獲得模糊的圖像,如圖2所示。捕捉的時刻由傳送帶定位裝置觸發產生。中間部分為恢復后的圖像,這里A取50,a為15。a的大小可以由實驗方法獲得,也可以由估計得出〔4〕。右邊為彎度測量結果的情況 ,實際上用作系統調試時作參考,如鏡頭光圈設定、處理中閾值設定等。在實際應用中,圖像的恢復和參數計算作為一個任務執行,恢復圖像作為中間結果不在屏幕上出現。
在圖像恢復方面,采用前面介紹的圖像恢復方法能夠獲得比較清晰的圖像,但也存在較大的噪聲,這一噪聲顯然與差分運算有關。毛桿的參數測量也會受到噪聲的影響,但在5×3豎向核的濾波作用下將會得到一定程度的改善。黑色背景中存在較大的噪聲,這主要是由CCD的電子噪聲引起的。采用適當的門限值抑制低亮度下的噪聲能夠獲得好的效果。這樣得到的測量結果與靜態條件下的結果較為接近,能滿足毛片參數測量及分揀方面的要求。??????
?????
???
參 考 文 獻
1 Gonzalez R,Woods R.DigitalImage Processing.Ad-dison-Wesley Publishing,19922 陸俊,舒志龍,阮秋琦.基于尺度旋轉的圖像恢復研究.通信學報,2000年7期
3 Castleman K R.DigitalImage Processing.北京:清華大學出版社,1998
4 Tekalp A M.數字視頻處理.北京:電子工業出版社,1998













 工商網監
工商網監
評論