想在PC104上用vxworks實現u***攝像頭的現實,是否很困難?群里還有誰做過的,求助!
2014-09-08 21:38:06
` 本帖最后由 shhgkjfzyxgs 于 2016-1-22 17:32 編輯
動態陀螺尋北儀特點 - 內置三軸光纖陀螺儀和伺服加速度計,可滿足高精度動態尋北- 初次上電對準后可無漂移連續
2016-01-22 17:30:08
請問各位大神,如何用公式節點讀取陀螺儀數據,陀螺儀型號是6050,謝謝!!!
2017-08-26 10:08:21
陀螺儀原理及應用
2019-07-20 15:42:35
陀螺儀原理及應用
2020-04-04 18:24:07
是靠電機驅動的,采用陀螺儀與驅動電路控制保持不倒。把身體向前傾斜就可以啟動。速度則是由傾斜程度來控制的,想要加速則向前傾,減速則向后傾。 陀螺儀是如何讓電動獨輪車做到動態穩定 有能力做到自身平衡
2018-11-09 16:10:59
系統。本文介紹該測試系統中陀螺儀測量用的數字式功率計的設計和精度分析。 由于陀螺馬達的功率變化量比較小,要對其功率變化進行分析,必須能分辨出10mW的功率變化[1]。根據公式P=UI可知測量功率需要
2019-06-04 06:37:56
文章目錄【實驗目的】【實驗原理】一、陀螺儀簡介二、MPU6050簡介【實驗環境】硬件設備:軟件環境:【實驗步驟】第一步 配置工程環境第二步 陀螺儀寄存器讀取函數和初始化函數第三步 編寫main.c
2021-08-06 06:08:22
陀螺儀的原理 以及怎么調 急求急求啊{:10:}{:10:}{:10:}{:10:}{:10:}{:10:}
2013-07-22 10:10:02
幫忙設計個陀螺儀控制的mp3,能控制暫停和開始。
2012-11-29 21:28:36
陀螺儀是什么來的?他有什么作用?在全國電設競賽中有什么例子嗎?求各位大伙幫幫忙解釋!十分感謝!
2017-07-30 17:06:12
陀螺儀漂移測試原理及其實驗技術
2016-08-17 12:09:47
`這陀螺儀和重力傳感器有什么區別呢?區別很多,但最大的區別就是重力傳感對于空間上的位移感受維較少,能做到6個方向的感應就已經很不錯了,而陀螺儀則是全方位的。這很重要,毫不夸張的說,這兩者不是一個級別
2020-09-03 07:29:47
設備當前的狀態,而這三個“鋼圈”所在的軸,也就是三軸陀螺儀里面的“三軸”,即X軸、y軸、Z軸,三個軸圍成的立體空間聯合檢測各種動作,然后用多種方法讀取軸所指示的方向,并自動將數據信號傳給控制系統。因此
2020-12-17 16:31:35
方法讀取軸所指示的方向,并自動將數據信號傳給控制系統。因此一開始,陀螺儀的最主要的作用在于可以測量角速度。 ●陀螺儀的基本組成 當前,從力學的觀點近似的分析陀螺的運動時,可以把它看成是一個剛體,剛體上有一個
2020-09-09 08:48:00
最近聽大牛的傳感器同事的陀螺儀專業講座,深入淺出的講解讓小編對陀螺儀的原理與應用有種頓悟趕腳,抽空整理部分內容,給對這個技術不太明了的小伙伴們科普下哦~陀螺儀是用來測量角速率的器件,在加速度功能基礎上,可以進一步發展,構建陀螺儀。
2019-07-25 06:15:32
`陀螺儀在航天航空中的應用 陀螺儀器最早是用于航海導航,但隨著科學技術的發展,它在航空和航天事業中也得到廣泛的應用。 陀螺儀器不僅可以作為指示儀表,而更重要的是它可以作為自動控制系統中的一個敏感
2020-09-04 07:52:53
說到陀螺儀有什么用,小編只能說,必不可缺吧!尤其是現在的智能終端已經大面積使用,之前因為成本較高,普遍用在飛機、航母及大型運作設備上,就用現在的智能手機來研究下陀螺儀吧,之后還會介紹清楚陀螺儀
2018-11-08 16:14:38
對于角速度傳感器,很多人可能會比較陌生,不過,如果說起陀螺儀,大家還是比較熟悉的。陀螺儀,是一種用來測量角速度的裝置。根據不同的工作原理,陀螺儀有哪些類型呢?
2019-09-12 09:05:05
` 本帖最后由 zwt_cn 于 2017-10-25 09:33 編輯
大家好!群里可有用過ADXRS453陀螺儀的大俠?遇到問題請教:這是檢測的兩個角度的比較,紅的是實際角度,綠色是陀螺儀測試到的角度明顯兩個測量的角速度誤差就是蠻大的所以到后來越積越多 `
2017-10-25 09:28:47
東哥好,請教一個問題:我在用CPLD做數字采集卡,AD芯片采集了的數據放到fifo里面,然后通過半滿信號告訴pc104總線取數據,二者之間加了hct245,可是控制hct245的傳輸數據方向的管腳DIR和PC104總線的讀數據的信號不怎么匹配的好,請教有什么好的解決辦法么?謝謝。。。
2013-07-22 10:12:25
陀螺儀開啟的時候會有偶發機器靜止的時候一抖動不停。我們這邊做過實驗,將一臺重沒出現這個問題的機器和一臺出現過這種問題機器對調陀螺儀。問題點是跟著陀螺儀走。主控是用的HI3559V200海思有大佬能解決問題嗎, 有償
2022-09-22 16:31:03
系統采用RSS調諧器環路,后者要求方位角和仰角保持在±1°范圍內,以便維持連續通信。在大多數動態情況下,PSC高度依賴y軸陀螺儀測量來控制仰角,以及依賴z軸陀螺儀測量來控制方位角。在此類動態情況下,航向
2018-10-17 10:39:42
系統采用RSS調諧器環路,后者要求方位角和仰角保持在±1°范圍內,以便維持連續通信。在大多數動態情況下,PSC高度依賴y軸陀螺儀測量來控制仰角,以及依賴z軸陀螺儀測量來控制方位角。在此類動態情況下,航向
2019-10-16 08:00:00
MEMS陀螺儀介紹
2020-05-14 09:31:29
3DM-GX5-25陀螺儀產品亮點集成有三軸加速度計,陀螺儀,磁力計和溫度傳感器,實現慣性導航最優解雙處理器運行自適應擴展卡爾曼濾波器(EKF),卓越的動態姿態估算優點同類性能最佳偏置跟蹤,誤差估計,閾值標志
2020-12-09 16:20:17
公司以前都使用pc104單板作為處理器,但是功耗和成本都偏高而我們使用時對資源的要求又不高,想用更低功耗的處理平臺但是我們公司沒有專業開發嵌入式平臺的隊伍問各位達人如何?
2009-02-04 15:06:29
mpu6050的陀螺儀采樣頻率為50hz,低通濾波為20HZ,陀螺儀的輸出頻率1kHZ或8HZ,為什么陀螺儀的輸出頻率比采樣頻率還高
2018-05-16 20:16:22
陀螺儀是分別感應Roll(左右傾斜)、Pitch(前后傾斜)、Yaw(左右搖擺)的全方位動態信息。 而6軸陀螺儀是指三軸加速器和三軸陀螺儀合在一起的稱呼。 三軸加速器就是感應XYZ(立體空間三個
2018-11-08 16:12:15
已經有很多大佬介紹過了MPU6050的協議、數據處理方式、濾波算法,所以這部分就不再復述了,本篇主要是針對看不懂長篇大論的小白的簡易上手的方法。首先呢還是得簡單介紹下什么是陀螺儀:MPU-60X0
2022-02-10 07:24:32
。因為工控機的總線為PC104,因此需要設計PC104與DSP之間的通信接口。系統中以Altera公司的一片FPGA芯片EPlK50來對該接口和數據采集過程中的邏輯控制與FIFO進行設計。下面主要闡述
2019-05-07 07:00:09
請教各位大神,這個陀螺儀如何接線?從陀螺儀出來只有9根黃線,每根線對應的如圖所示。我現在是2、3腳另外接穩壓電源,8、9腳接RS232串口的2、5腳,然后經過USB轉換插筆記本上,在串口工具里什么也接收不到,但是如果只接RS232的2腳,一直接收FF。
2017-05-06 21:38:31
本帖最后由 餅干11 于 2021-8-11 09:44 編輯
我想在一個比較大的平臺,分別安裝陀螺儀實現這個平臺穩定,平臺是三個吊輪吊著的,如何讓陀螺儀判斷哪個吊輪快了或者慢了,然后給單片機指令去控制吊輪,但是平臺太大了會不會導致陀螺儀不靈敏,比如人在地球上感覺不到地球自轉一樣。
2021-08-11 08:32:28
的工作壽命更長、成本更低和制造更簡單,這種陀螺也被稱為固態環形激光陀螺儀(固態RLG)。 目前,基于氦-氖環形激光陀螺儀的慣性導航系統已經廣泛應用在航空和航海導航、戰略導彈的導航、制導與控制領域,成為
2018-11-09 16:05:25
單片機溫度采集器與PC104分站的串行通信
2012-08-06 23:45:47
買了個F072 DISCO,上有純陀螺儀一個,不知道可以做什么應用呢,剛開始想做空中飛鼠,但是他是陀螺儀啊,沒加速度功能,所以解不出姿態啊.即便是斜著,只要不再移動板子,他的輸出就能保持為0,他測量的是動態中的轉動,所以,做防跌落還挺好的,但是其他東西還能做什么.
2019-03-26 18:33:20
本調制器是一種基于PC104總線的嵌入式系統的外圍設備,嵌入式計算機系統通過PC104總線將數據發送到端口,調制器接收數據并進行調制后,將信號輸出到受控設備,從而對相應設備起到控制的功能。在本調制器的硬件電路中使用FPGA,提高了系統的通用性。
2021-04-30 06:19:03
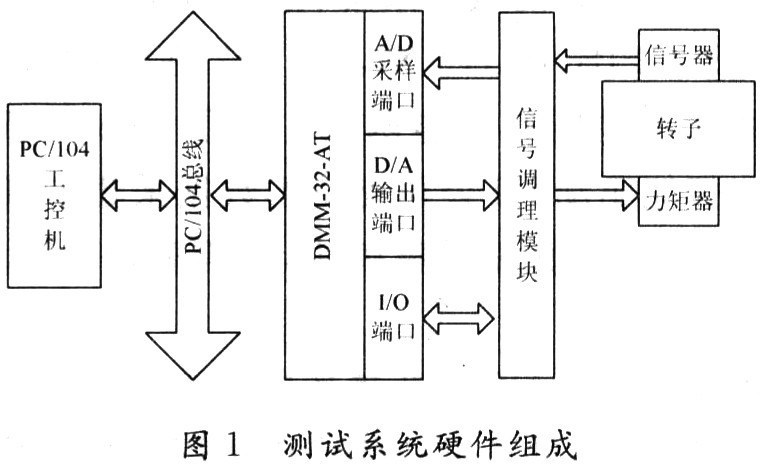
陀螺儀動態測試系統軟件是由哪些部分組成的? 硬件又是由哪些部分組成的?請問如何利用PC/104來設計陀螺儀動態測試系統?
2021-04-13 06:02:27
很多人可能都還不知道手機上陀螺儀的作用,甚至是手機上還有個叫陀螺儀的玩意兒。陀螺儀其實通常被叫做角速度傳感器,是通過測量物理量的偏轉與傾斜的轉動角速度來進行判定的。通過高速回轉體的動量矩敏感殼體相對
2018-11-07 09:53:37
本設計采用了復雜可編程器件CPLD,用CPLD完成了PC104總線與429總線通訊的主要電路,大大節省了硬件資源,本文著重介紹了CPLD部分的設計。
2021-04-29 06:47:46
本文設計了一種基于FPGA的測試系統,模擬光纖陀螺儀的表頭,并檢測調制解調電路的性能。
2021-05-08 07:30:39
擺式羅盤。21世紀發展為利用自動控制系統代替重力擺的電控陀螺羅盤,并創造出能同時指示水平面和子午面的平臺羅盤。 速率陀螺儀。用以直接測定運載器角速率的二自由度陀螺裝置。把均衡陀螺儀的外環固定在運載器上
2020-09-06 07:49:27
打擾各位一下,很想知道現在用PC104的人還多嗎?如果之前用現在沒用,你們現在用的啥?做個小調查,還希望各位帥哥不吝賜教。先謝過了
2017-10-23 14:48:52
本文設計了一種基于FPGA的測試系統,模擬光纖陀螺儀的表頭,并檢測調制解調電路的性能。
2021-05-10 06:03:49
PC104是嵌入式工控機的一種,其外部總線接口為PC104總線。使用堆疊的方式可以將多個PC104主板結合到一起,并通過螺栓固定,保證系統的牢固可靠,應對惡劣的使用環境。由于PC104具有功耗低,體積小,擴展性高,功能強大等優點,其已經在航空航天、軍用武器裝備、工業控制等領域得到了廣泛的使用。
2019-09-27 06:30:40
怎樣去實現MCS51單片機與PC104 ISA總線的并行通信?
2021-04-30 06:39:11
本文主要介紹了一種基于PC104無人機的視頻系統構建方法和流程。
2021-06-07 06:01:21
陀螺儀(角速率傳感器或角速度傳感器)是一種可以測量到物體角速度的裝置。陀螺儀可以感知旋轉運動和方向的變化。角速度不同,運動產生的電位差也不同。陀螺儀將角速度的變化轉換成電信號輸出。
2020-08-19 06:15:05
陀螺儀因其獨特的性質,被廣泛應用在導航系統(航空航海)、運動分析與控制、平臺的穩定性檢測與控制、滾動檢測、轉速控制、高要求的慣性測量單元、機器人控制系統等方面,而在電子領域則可以用于光學防抖
2018-12-05 15:25:46
陀螺儀測試系統硬件是怎樣設計的?如何去設計陀螺儀測試系統的軟件?怎樣去設計一款機載陀螺儀測試系統?并將其應用于哪些領域?
2021-04-13 06:19:00
傳統的航空機載陀螺儀測試系統采用分立儀器搭建,具有成本高、自動化程度低、擴展性差的缺點,因此,這里提出一種基于虛擬儀器技術的航空機載陀螺儀自動測試系統的設計方案。
2021-05-11 06:15:04
航向陀螺儀主要有陀螺電機、萬向支架、隨動托架系統、水平修正裝置、信號輸出裝置、輸電裝置、減震裝置、電連接器、外殼等組成。
2019-11-11 09:02:04
陀螺儀檢測有和缺陷?
2021-10-12 12:55:23
MEMS陀螺儀是如何工作的?
2021-03-18 06:48:50
RTA適用于測試微機電系統加速度計和陀螺儀的多軸定位器系列。它們允許同時對多達 140 個器件進行多站點測試,同時提供精確可靠的角位置、速率和加速度運動。加速度計使用恒定速度,陀螺儀測試則采用正弦角
2022-09-26 16:52:21
描述了Paradigm C++ IDE 嵌入式系統開發工具的功能和應用范圍,并介紹了PC104嵌入式計算機系統的性能和特點,重點說明了在Paradigm 環境下開發基于PC104 的應用系統的存儲空間
2009-05-30 08:58:42 15
15 描述了Paradigm C++ IDE 嵌入式系統開發工具的功能和應用范圍,并介紹了PC104嵌入式計算機系統的性能和特點,重點說明了在Paradigm 環境下開發基于PC104 的應用系統的存儲空間
2009-05-30 10:44:5029 軟件測試是軟件質量保證的重要手段。本文構建了基于軟件測試工具Testbed/RTInsight 針對PC104 系統的實時嵌入式軟件測試環境。以求方程根的c 程序為例進行PC104 系統的軟件動態測試,
2009-07-07 14:21:2814 本文介紹了基于 Windows CE 的PC104 模塊與基于MCS51 單片機的GPIB 接口構成自動測試儀器的實現方法,其中GPIB 接口與單片機間的數據傳輸和PC104 模塊與單片機之間的串行通信是系統實現
2009-08-13 08:15:0735 選用適當的VXI 硬件模塊和合理的軟件結構體系,構建了基于VXI 總線的動力調諧陀螺儀測試平臺,采用在陀螺儀力矩器上加指令電流的方法標定陀螺儀的角加速度動態誤差系數項。通
2009-08-17 09:12:3916 對一種采用捷聯技術的基于PC104 的路譜測量系統的構成和主要功能進行了介紹,對系統的信號處理電路進行了詳細的分析和設計,采用FPGA 設計實現了對傳感器輸出信號的處理和
2009-08-19 08:17:0313 論文簡要分析了Linux 操作系統啟動過程,介紹了Busybox、MiniGUI 等優秀的嵌入式專用軟件,以及以PC104 主板和CF(CompactFlash)卡構建帶圖象用戶界面(GU
2009-09-05 10:06:2438 單片機溫度采集器與PC104分站的串行通信:用PC104 模塊組建的礦井變電所采集分站,具有強大的以太網和CAN 總線通信功能。在PC104模塊底板上,設計了一個基于89C2051 單片機的溫度采集器,
2009-12-03 22:32:2333 論文簡要分析了Linux 操作系統啟動過程,介紹了Busybox、MiniGUI 等優秀的嵌入式專用軟件,以及以PC104 主板和CF(CompactFlash)卡構建帶圖象用戶界面(GUI)的嵌入式Linux 操作系統的
2010-06-24 15:37:3531 基于PC104的電纜通斷測試儀設計
0引言
電纜的應用非常廣泛,且長時間使用后經常會出現短路或者斷路的情況,目前我國許多行業的電纜通斷測試仍停留在手工階
2009-12-25 09:55:26 1616
1616 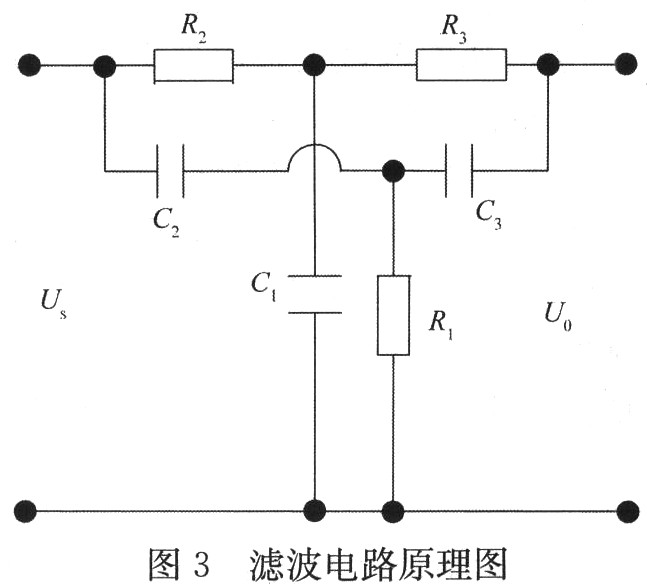
本文設計利用工控機上的PC104總線,通過共享雙端口RAM的方式,實現工控機與DSP之間的高速數據交換。本文詳細介紹了系統設計的基本思路,PC104與雙口RAM的硬件連接方式及其設計要點。
2011-04-15 15:02:2291 深度模擬器根據設定指令產生期望的壓力輸出,用來模擬水下航行器在不同深度所承受的水壓。利用PC104 總線產品體積小、嵌入式的特點,研制基于PC104 總線的小型化車載型深度模擬器
2011-06-17 17:30:4330 針對某型導彈隨動裝置在實際應用中的測試需求,設計了一種基于 PC104 嵌入式系統開發平臺的高可靠、高精度、小體積的檢測系統,詳細介紹了該系統各功能模塊的硬件電路設計,同時
2011-07-12 16:39:1544 設計開發了嵌入式實時操作系統VxWorks 的一種基于PC104 總線的板載支持包, 完成了相關的外圍驅動程序設計和調試工作。
2011-09-07 16:09:0454 介紹了一個基于PC104的數據采集與檢測電路的設計,它完成A/D數據采集、D/A數字/模擬轉換、數字量輸入/輸出、信號顯示卡以及LCD顯示器的控制等功能。PC104總線信號檢測電路對于改進裝
2011-09-19 15:32:1829 低空測試儀試驗需要把整個測試儀作為吊艙掛在直升機下工作,能適應各種惡劣的自然條件,用于某飛行部件地海雜波環境下的測試。以PC104嵌入式計算機為硬件平臺,標準C++為開發工
2013-01-08 18:24:1740 基于PC104總線的旋轉變壓器電路圖基于PC104總線的旋轉變壓器電路圖
2015-10-28 14:25:130 基于PC104和DSP的交流電量同步采集系統
2017-10-19 11:55:233 PC104總線是專為嵌入式控制系統定義的一種工業控制線,其應用廣泛,但是內部結構復雜,出現故障不易檢測。設計了一種基于FPGA的PC104總線故障自動監控平臺,對PC104總線信號進行實時監控和故障檢測。
2017-11-06 18:24:599140 
由于普通PC機在工業現場控制中存在著體積龐大、功耗高、可靠性差等缺點,美國Ampro 公司、德國Jeptec公司、瑞士的DigitalLogic公司等在1987年推出了PC104嵌入式模塊,而嚴格
2020-06-03 08:50:001818 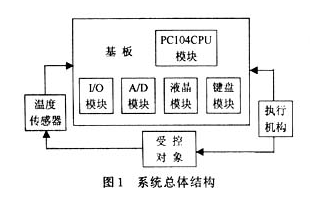
為了解決某型航空發動機排氣溫度無法地面實時監控的問題,研制了排氣溫度測量系統。該系統利用PC104嵌入式工業計
2021-06-12 22:16:002422 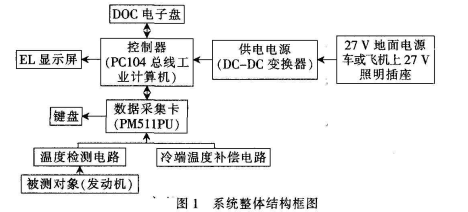
電子發燒友網站提供《基于PC104的實時信號采集處理系統設計.pdf》資料免費下載
2023-10-10 09:37:541 電子發燒友網站提供《基于PC104的放線車檢測系統硬件設計.pdf》資料免費下載
2023-10-24 10:54:260
正在加载...
 電子發燒友App
電子發燒友App













 工商網監
工商網監
評論