 電子發(fā)燒友App
電子發(fā)燒友App


1. IV范圍
針對(duì)設(shè)備選用具有適當(dāng)電壓電流范圍的源測(cè)量單元(SMU)對(duì)于應(yīng)用的成功至關(guān)重要。IV范圍通常由圖1中象限圖來(lái)表示,它指的是SMU可以拉或灌的電壓和電流值。拉和灌這兩個(gè)詞描述的是設(shè)備的功率流入和流出。拉電流的設(shè)備可為負(fù)載提供電流,而灌電流的設(shè)備就像一個(gè)負(fù)載,被動(dòng)吸收流入的電流,且可為電流提供返回路徑。
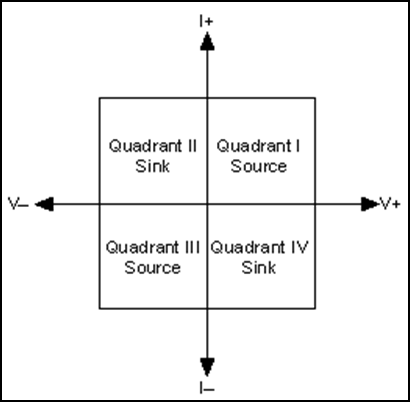
圖 1. 四個(gè)象限區(qū)域表示設(shè)備拉灌的電流或電壓值
在上面的象限圖中,I和III象限代表設(shè)備處于拉電流狀態(tài),而象限II和IV代表設(shè)備處于灌電流狀態(tài)。在象限I和III內(nèi)均能夠拉電流的設(shè)備有時(shí)也稱其具有兩極性,因?yàn)檫@些設(shè)備能夠既能產(chǎn)生正電壓和電流,也能產(chǎn)生負(fù)電壓和電流。“四象限SMU”這個(gè)詞通常用語(yǔ)描述可拉灌電流的雙極SMU。
例如,NI PXI-4132 四象限SMU的最大電壓輸出是100 V,最大電流輸出是100 mA;但是,它不能同時(shí)輸出100 V的電壓和100 mA的電流。在這種情況下,象限圖就提供了所需的信息,幫助您輕松地確定SMU可以提供或灌入的最大電壓和電流組合。僅僅是簡(jiǎn)單地列出具有多個(gè)量程的SMU的最大電壓和電流并無(wú)法為您提供足夠的信息來(lái)確定該儀器是否符合設(shè)備的IV要求。
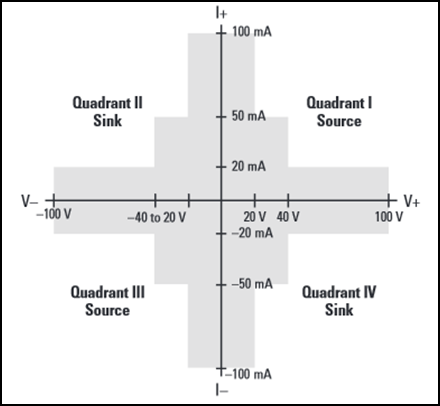
圖 2. NI PXI-4132 IV 范圍
表1 歸納了每種NI電源和SMU設(shè)備每個(gè)通道的輸入輸出能力。
DeviceChannel(s)Quadrant
IIIIIIIV
NI PXI-411006 W———
120 W———
2——20 W—
NI PXIe-41120 and 160 W———
NI PXIe-41130 and 160 W———
NI PXI-413006 W———
140 W10 W140 W10 W1
NI PXI-413202 W2 W2 W2 W
NI PXI-4138/4139020 W12 W120 W12 W1
NI PXIe-4140/41410 through 31 W1 W1 W1 W
NI PXIe-4142/41430 through 33.6 W3.6 W13.6 W3.6 W1
NI PXIe-4144/41450 through 33 W3 W13 W3 W1
NI PXIe-4154018 W1——18 W
112 W1——0.8 W1
1查看設(shè)備的規(guī)格參數(shù),了解詳細(xì)IV范圍。
表1. NI儀器產(chǎn)品每個(gè)通道的輸入輸出能力
2. 精確度
電源或SMU的測(cè)量分辨率是指電壓或電流測(cè)量中硬件可以檢測(cè)到的最小變化。電源或SMU輸出通道的輸出分辨率是指輸出電壓或電流電平的最小可能變化。這些測(cè)量通常以絕對(duì)單位表示,比如nV 或pA。分辨率通常是由測(cè)量所使用的模數(shù)轉(zhuǎn)換器(ADC)決定,但高精度SMU通常受限于噪聲等其他因素。
靈敏度是指儀器在規(guī)定的條件下能夠檢測(cè)到且有意義的給定參數(shù)的最小單位。這個(gè)單位通常等于電源或SMU最小量程內(nèi)的測(cè)量分辨率。
一般情況下,應(yīng)該使用SMU的最小量程才能獲得最佳精度。該信息可在儀器的規(guī)范手冊(cè)中找到。以下是一個(gè)例子:
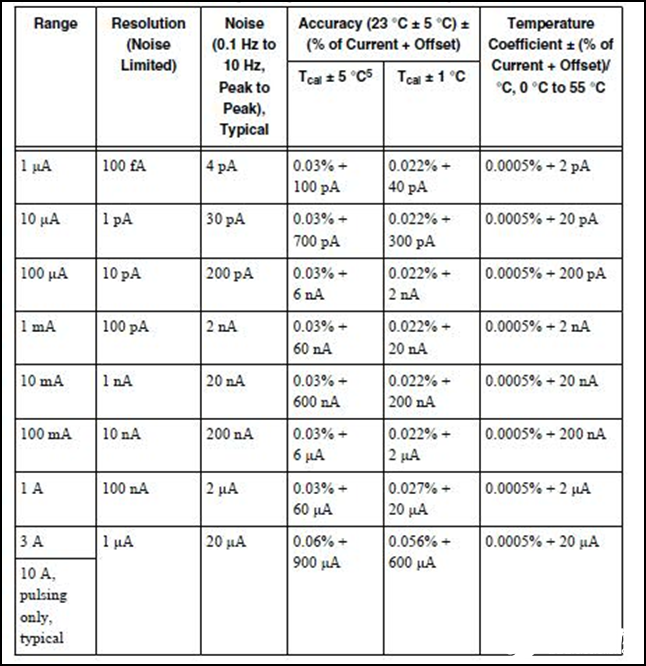
表 2. NI PXIe-4139 電流編程和測(cè)量精確度/分辨率
3. 源測(cè)量準(zhǔn)確度
電源或SMU的測(cè)量或輸出電平與實(shí)際或要求的值可能會(huì)有所不同。準(zhǔn)確度表示的是一定測(cè)量或輸出電平下的不確定度,也可以指與理想傳遞函數(shù)的偏差,如下所示:
y = mx + b
其中 m 是指系統(tǒng)的理想增益
x 是指系統(tǒng)的輸入
b 是指系統(tǒng)的偏置
y 是系統(tǒng)的輸出
該公式用于電源或SMU信號(hào)測(cè)量時(shí),y 是指設(shè)備的輸出讀數(shù)值,其中 x 作為輸入, b 為偏置誤差,可在測(cè)量之前將其歸零。如果 m 為 1, b為0, 則輸出測(cè)量值等于輸入值。如果 m 為 1.0001,則測(cè)量結(jié)果與理想值的偏差是0.01%。
對(duì)于大多數(shù)高分辨率、高準(zhǔn)確度電源與SMU,準(zhǔn)確度是指偏置誤差和增益誤差的組合。這兩種誤差相加可用于確定特定測(cè)量的總體準(zhǔn)確度。 NI電源與SMU通常以絕對(duì)單位(例如mV或μA)來(lái)表示偏置誤差,而增益誤差通常是讀數(shù)或請(qǐng)求值的百分比。
SMU的典型源測(cè)量準(zhǔn)確度等于或低于所設(shè)定輸出的0.1%。每個(gè)NI SMU儀器的規(guī)范手冊(cè)中均有提供這些信息。
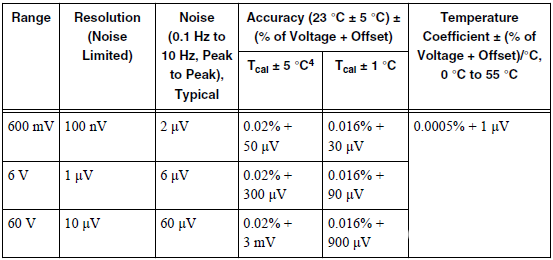
表 3. NI PXIe-4139 的電壓編程和測(cè)量準(zhǔn)確度/分辨率
4. 測(cè)量速度
測(cè)量采集窗口或孔徑時(shí)間會(huì)直接影響測(cè)量速度和精確度。某些SMU可修改儀器的孔徑時(shí)間,使您能夠靈活地?cái)U(kuò)展高精確度測(cè)量的采集窗口,或者減小高速采集的窗口。擴(kuò)展測(cè)量孔徑可讓儀器有更多的時(shí)間進(jìn)行采樣和平均,從而降低測(cè)量噪聲和提高分辨率。下圖顯示了在不同的電流范圍下測(cè)量噪聲與孔徑時(shí)間之間的函數(shù)關(guān)系。
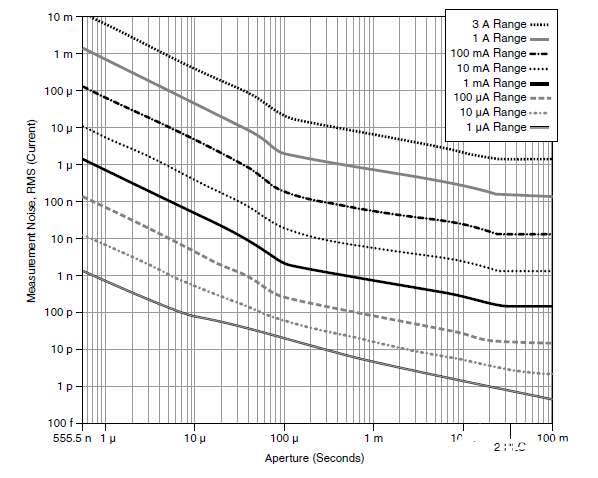
圖 3. 測(cè)量噪聲與孔徑時(shí)間的函數(shù)關(guān)系圖
為了實(shí)現(xiàn)高精確度測(cè)量,使用的孔徑時(shí)間必須既能夠提供適當(dāng)分辨率,同時(shí)仍可最大限度地減少整體測(cè)試時(shí)間。相反,對(duì)于精確度較低的測(cè)量或者對(duì)線路或負(fù)載瞬態(tài)等信號(hào)進(jìn)行數(shù)字化時(shí),應(yīng)該使用較小的孔徑時(shí)間。例如, NI PXIe-4139 能夠以高達(dá)1.8 MS / s的速率采樣,可幫助您詳細(xì)研究SMU輸出的瞬態(tài)特性。取決于電流范圍,當(dāng)噪聲為1 nA – 10mA時(shí)測(cè)量速度可達(dá)到1.8 MS / s。
5. 源更新率
SMU的更新速?zèng)Q定了SMU輸出電壓或的電流的變化速率。例如,更新率為100 kS / s的SMU能夠每隔10 us為下一個(gè)點(diǎn)提供電流。更新速率快的SMU能夠以比傳統(tǒng)SMU快得多的速度執(zhí)行冗長(zhǎng)的IV掃描。此外,更新速率快的SMU還可為正弦波等非傳統(tǒng)序列提供電流。
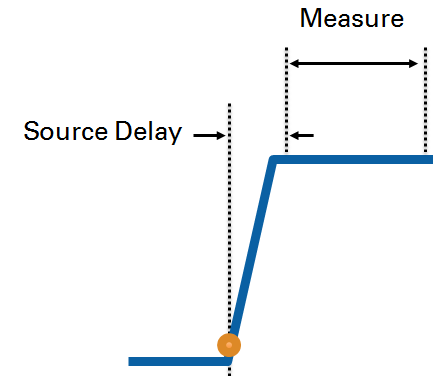
圖 4. 通過(guò)改變?cè)囱舆t或者電壓階躍開(kāi)始和測(cè)量開(kāi)始之間的時(shí)間差來(lái)控制SMU的更新率。
6. 瞬態(tài)響應(yīng)
瞬態(tài)響應(yīng)是指電源對(duì)于電壓或電流突變的響應(yīng),電壓或電流突變通常是由于負(fù)載變化等外部事件或者輸出電壓階躍等內(nèi)部事件引起的。
外部負(fù)載變化
外部負(fù)載電流的變化會(huì)引起電壓急劇變化,使電壓短暫地低于預(yù)期電壓輸出。瞬態(tài)響應(yīng)是指負(fù)載電流發(fā)生變化(ΔI)時(shí)電源電壓恢復(fù)到一定電壓值(ΔV)所需的時(shí)間。快速瞬態(tài)響應(yīng)對(duì)于移動(dòng)設(shè)備的供電至關(guān)重要。待測(cè)設(shè)備(DUT)消耗的負(fù)載電流如果發(fā)生較大的瞬時(shí)變化,會(huì)導(dǎo)致輸出電壓驟降,隨后通過(guò)電源的控制電路將輸出電壓恢復(fù)到其原始值。對(duì)于典型的可編程電源,這往往需要數(shù)百微秒的時(shí)間。而NI PXIe-4154的20μs瞬態(tài)響應(yīng)(設(shè)置為“快速”模式時(shí))能夠使模擬電路在測(cè)試過(guò)程中迅速響應(yīng)負(fù)載電流的變化。如此短的恢復(fù)時(shí)間成為許多采用脈沖式通信協(xié)議的無(wú)線通信設(shè)備的最佳選擇。
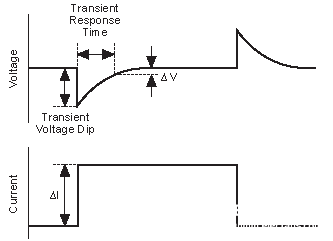
圖 5. 瞬態(tài)響應(yīng)的典型定義圖
改變SMU輸出
當(dāng)SMU輸出改變時(shí),該儀器的瞬態(tài)設(shè)置定義了輸出的上升時(shí)間以及達(dá)到預(yù)期輸出并處于穩(wěn)定狀態(tài)所需的時(shí)間。理想的瞬態(tài)響應(yīng)具有快速上升時(shí)間,且沒(méi)有任何過(guò)沖或振蕩。在許多負(fù)載下,需要在瞬態(tài)響應(yīng)和電源穩(wěn)定性之間進(jìn)行權(quán)衡。如果要獲得最快瞬態(tài)響應(yīng),設(shè)備應(yīng)具有高增益帶寬積(GBW),但增益帶寬積越高,設(shè)備在特定負(fù)載下變不穩(wěn)定的可能性越高。因此,大多數(shù)設(shè)備在許多情況下以犧牲性能為代價(jià)來(lái)獲得穩(wěn)定性。其他設(shè)備可在很小程度上實(shí)現(xiàn)自定義,以在不同情況下優(yōu)化性能。例如,許多傳統(tǒng)SMU具有“高容量”模式,專用于與具有高達(dá)50 uF電容的設(shè)備一起使用的情況。
某些NI SMU采用了稱為NI SourceAdapt的數(shù)字控制回路技術(shù),該技術(shù)使您能夠自定義調(diào)整SMU的瞬態(tài)響應(yīng),從而獲得針對(duì)任何給定負(fù)載的最佳響應(yīng)。這提供了最佳源測(cè)量單元響應(yīng),同時(shí)也可實(shí)現(xiàn)最短的穩(wěn)定時(shí)間,從而縮短了等待時(shí)間和測(cè)試時(shí)間。此外,該技術(shù)不僅消除了過(guò)壓,保護(hù)了待測(cè)設(shè)備(DUT),而且也消除了振蕩,確保了系統(tǒng)的穩(wěn)定性。由于源測(cè)量單元響應(yīng)的調(diào)整是通過(guò)編程軟件來(lái)完成的,您可以輕松地將針對(duì)高速測(cè)試的源測(cè)量單元重新配置為針對(duì)高穩(wěn)定性測(cè)試的單元—這樣可以最大化您的測(cè)試設(shè)備投資回報(bào),以及獲得更好的測(cè)試結(jié)果。

圖 6. The NI PXIe-4139 具有可配置的瞬態(tài)響應(yīng)設(shè)置,以靈活地對(duì)輸出控制回路進(jìn)行負(fù)載補(bǔ)償。
以下表格列出了采用NI SourceAdapt技術(shù)的NI SMU型號(hào):
產(chǎn)品名稱e類型采用SourceAdapt
NI PXI-4130大功率 SMU無(wú)
NI PXI-4132高精度 SMU無(wú)
NI PXIe-4138/9高精度系統(tǒng) SMU僅 NI PXIe-4139
NI PXIe-4140/14通道 SMU僅 NI PXIe-4141
NI PXIe-4142/34通道 SMU僅 NI PXIe-4143
NI PXIe-4144/54通道 SMU僅 NI PXIe-4145
表 4. 快速查看采用NI SourceAdapt技術(shù)的NI產(chǎn)品。
7. 序列或掃頻
SMU通常有兩種輸出模式:?jiǎn)吸c(diǎn)或序列。在單點(diǎn)模式下,SMU僅輸出一個(gè)值,而在序列模式下,SMU輸出一系列值,并測(cè)量每個(gè)點(diǎn)的IV數(shù)據(jù)。
單點(diǎn)源模式
單點(diǎn)模式通常是用于捕獲某個(gè)值的IV數(shù)據(jù),比如測(cè)試二極管的正向電壓,或者使用SMU為待測(cè)設(shè)備供電(如以恒定電壓為集成電路供電)。單點(diǎn)模式的用例包括開(kāi)發(fā)軟件定時(shí)的序列,在軟件中循環(huán)運(yùn)行一系列單點(diǎn)SMU輸出。當(dāng)SMU在沒(méi)有事先計(jì)劃的情況下不支持更改特定功能時(shí),軟件定時(shí)的序列可以用于代替硬件定時(shí)的序列。
序列模式
SMU在序列模式下運(yùn)行時(shí)可輸出一系列硬件定時(shí)的值,提供了更快速且更確定的輸出(以及與其他PXI儀器同步)等優(yōu)勢(shì)。這一過(guò)程包括SMU提供直流電壓或電流,然后測(cè)量電壓和電流,接著再循環(huán)至序列中下一個(gè)點(diǎn)。取決于SMU功能,您可以更改序列中每一步的輸出電平、電流或電壓范圍、孔徑時(shí)間以及瞬態(tài)響應(yīng)。對(duì)于存儲(chǔ)大量序列,SMU提供了兩種方法:專用的板載內(nèi)存和支持從主機(jī)到SMU低延遲數(shù)據(jù)流傳輸。例如,NI PXIe-4138和NI PXIe-4139PC通過(guò)一個(gè)高帶寬低延遲PCI Express連接將數(shù)據(jù)從主機(jī)傳輸?shù)絊MU,并可讓您透明地輸出具有數(shù)百萬(wàn)個(gè)設(shè)定值和屬性的序列。
序列模式通常用于IV特性記述或老化測(cè)試,而且對(duì)于那些需要與其他儀器緊密同步的應(yīng)用(如測(cè)試射頻集成電路)通常是必不可少的。
8. 脈沖生成
大多數(shù)使用SMU的半導(dǎo)體測(cè)試應(yīng)用均涉及某種形式的源測(cè)量操作。在序列模式下,該過(guò)程通常包括SMU提供直流電壓或電流,然后測(cè)量電壓和電流,接著再循環(huán)至序列中下一個(gè)點(diǎn)。基本的直流掃描會(huì)以遞增方式逐漸增加輸出,直至完成序列的每個(gè)點(diǎn),如下圖所示,該圖顯示了一個(gè)五步電流值序列。
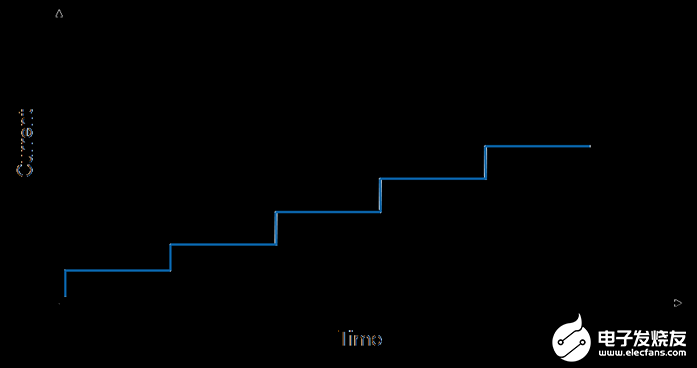
圖 7. 基本直流掃描時(shí)的五步序列示例
某些應(yīng)用中,特別是高功率應(yīng)用中,如果沒(méi)有關(guān)閉SMU輸出就試圖掃描序列,可能會(huì)導(dǎo)致不正確的行為或復(fù)雜的測(cè)試設(shè)置。對(duì)于這些應(yīng)用,SMU的脈沖輸出是首選,因?yàn)樵撦敵隹勺屇诓煌脑O(shè)定點(diǎn)進(jìn)行源測(cè)量,同時(shí)最大限度地減少通過(guò)DUT的散熱損失。脈沖掃頻與直流掃描的相似之處在于兩者均包含輸出設(shè)定值、等待輸出穩(wěn)定然后進(jìn)行測(cè)量等過(guò)程。脈沖測(cè)試的不同之處在于,源在經(jīng)過(guò)很短的脈沖持續(xù)時(shí)間后恢復(fù)到偏置電平。在大多數(shù)情況下,設(shè)定偏置電平的目的是為了關(guān)閉DUT(例如0V或0A)。
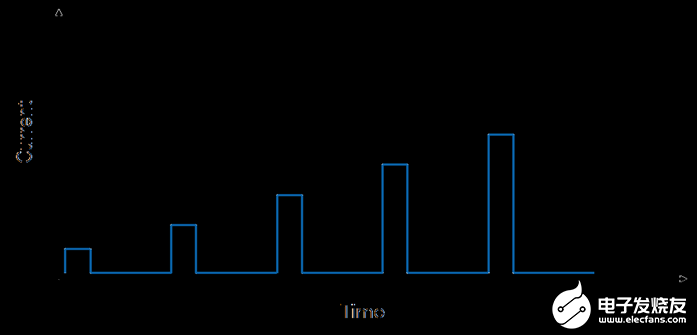
圖 8. 脈沖輸出可讓源在轉(zhuǎn)到下一個(gè)設(shè)定值之前恢復(fù)至偏置電平。
在理想條件下,前面兩個(gè)圖中的脈沖序列和直流序列應(yīng)該返回至相同的IV數(shù)據(jù)。然而,如前面提到的,直流序列通過(guò)DUT消耗的熱量更多,這會(huì)導(dǎo)致不正常的行為和較不理想的測(cè)試結(jié)果。這也是這些類型的應(yīng)用優(yōu)先選擇脈沖測(cè)試的原因。在脈沖模式下進(jìn)行測(cè)試時(shí),脈沖寬度應(yīng)該足夠長(zhǎng),使得設(shè)備能夠達(dá)到全導(dǎo)通狀態(tài)以進(jìn)行穩(wěn)定的測(cè)量,同時(shí)脈沖寬度又必須足夠短,以最小化待測(cè)設(shè)備的自熱效應(yīng)。在生成脈沖時(shí),快速干凈的SMU響應(yīng)顯得尤為重要,這是因?yàn)镾MU總是從脈沖偏置電平開(kāi)始,而不是以小幅增量逐漸增大輸出。
特定的SMU可讓您生成超出傳統(tǒng)直流電源范圍的脈沖,以滿足需要更高電流的應(yīng)用。例如,NI PXIe-4139可在50 V電壓下生成高達(dá)10 A的脈沖,提供高達(dá)500 W的瞬時(shí)功率。取決于負(fù)載和SourceAdapt控制設(shè)置,脈沖寬度可以短至50微秒。短脈沖寬度不僅縮短了測(cè)試執(zhí)行時(shí)間,而且還可最大程度降低待測(cè)設(shè)備的散熱,便于測(cè)試工程師進(jìn)行測(cè)試,否則可能需要增加散熱器或其它熱控制機(jī)制。
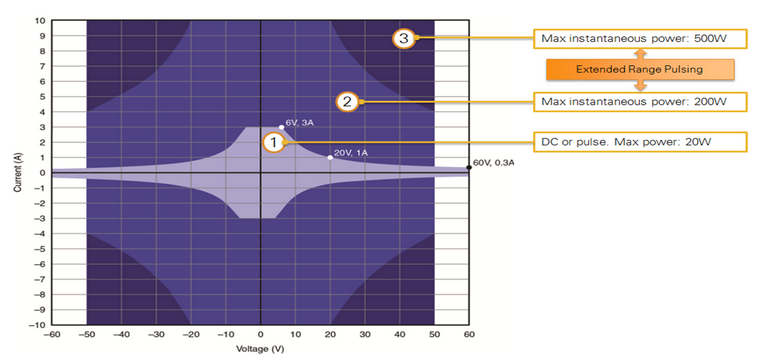
圖 9. NI PXIe-4139 IV 范圍
9. 通道密度
模塊化SMU的一個(gè)主要優(yōu)點(diǎn)是緊湊的尺寸。傳統(tǒng)SMU配有專門的顯示器、處理器、電源、風(fēng)扇、旋鈕以及其它冗余組件,使得構(gòu)建高通道數(shù)系統(tǒng)的過(guò)程復(fù)雜化。由于模塊化SMU與機(jī)箱和控制器共享組件,從而減少了冗余組件,占用空間比傳統(tǒng)儀器要小得多,最終減小了測(cè)試系統(tǒng)的體積和功耗。
應(yīng)用所需的通道數(shù)會(huì)隨著時(shí)間而變化。傳統(tǒng)箱式SMU的一兩個(gè)通道已經(jīng)無(wú)法滿足許多應(yīng)用的需要。半導(dǎo)體行業(yè)的并行IV測(cè)試系統(tǒng)更是如此,該測(cè)試需要在緊湊的空間中使用大量的SMU通道。借助NI模塊化SMU,您可以將多臺(tái)儀器組合在單個(gè)PXI機(jī)箱中,在19寸4U的機(jī)架空間內(nèi)創(chuàng)建多達(dá)68個(gè)SMU通道的高通道數(shù)解決方案,傳統(tǒng)SMU僅可提供四到八個(gè)通道。 PXI平臺(tái)的緊湊尺寸和模塊化特性還使您能夠?qū)MU與其他基于PXI的儀器(如示波器、開(kāi)關(guān)和射頻儀器)相結(jié)合,以建立高性能混合信號(hào)測(cè)試系統(tǒng)。
圖 10.使用高密度NI SMU在單個(gè)4U機(jī)架內(nèi)構(gòu)建高達(dá)68個(gè)SMU通道的系統(tǒng)。
10. 定時(shí)和同步
觸發(fā)是啟動(dòng)設(shè)備操作的一種信號(hào)。事件是指設(shè)備發(fā)出的信號(hào),用于指示某個(gè)操作已完成或某個(gè)狀態(tài)已達(dá)到。您可使用觸發(fā)和事件同步單個(gè)NI電源或SMU中的多個(gè)操作或者同步與其他PXI/ PXI Express設(shè)備的操作。許多應(yīng)用涉及多種儀器,如示波器、信號(hào)發(fā)生器、數(shù)字波形分析儀、數(shù)字波形發(fā)生器和開(kāi)關(guān)。對(duì)于這些應(yīng)用,PXI和NI模塊化儀器的固有定時(shí)和同步功能使您無(wú)需使用外部電纜即可同步所有這些儀器。
使用該觸發(fā)功能時(shí),您可從以下觸發(fā)類型中進(jìn)行選擇:
開(kāi)始:源單元測(cè)量單元接收到該觸發(fā)后,開(kāi)始執(zhí)行操作。
源:設(shè)備接收到該觸發(fā)后,源單元開(kāi)始修改源配置。
測(cè)量:測(cè)量單元接收到該觸發(fā)開(kāi)始進(jìn)行測(cè)量。而測(cè)量單元進(jìn)行測(cè)量時(shí),該觸發(fā)被忽略。
序列前進(jìn):完成一次序列迭代后,源單元等待接收到該觸發(fā)后才開(kāi)始下一次迭代。
脈沖:源單元等待接收到該觸發(fā)后,開(kāi)始從“脈沖偏置”轉(zhuǎn)換至“脈沖電平”。
PXI平臺(tái)針對(duì)觸發(fā)進(jìn)行優(yōu)化的一個(gè)例子是NI PXIe-4138/4139模塊。模塊通過(guò)PXI機(jī)箱背板來(lái)發(fā)送和接收觸發(fā)和事件,從而簡(jiǎn)化了編程和系統(tǒng)布線。這些模塊還可以實(shí)現(xiàn)硬件定時(shí),同時(shí)具有高速序列引擎來(lái)同步多個(gè)SMU之間的握手。
圖 11. 用于觸發(fā)和定時(shí)的序列引擎圖
NI PXIe-4138與NI PXIe-4139模塊還利用了PXI的高帶寬和低延遲優(yōu)勢(shì),而且支持主機(jī)和SMU之間的直接DMA數(shù)據(jù)流傳輸。這使您能夠以儀器的最高更新率(100 KS/s)和采樣率(1.8 MS/s)透明地傳輸大量的波形和測(cè)量數(shù)據(jù),從而消除了傳統(tǒng)儀器總線的帶寬和延遲瓶頸。
11. 軟件、分析功能和自定義化
為應(yīng)用選擇模塊化SMU時(shí)確定軟件和分析功能是非常重要的,因?yàn)樵撘蛩乜梢詭椭趦膳_(tái)儀器之間做出選擇。
獨(dú)立式SMU通常采用基本的寄存器級(jí)命令以及供應(yīng)商定義的功能,而模塊化SMU是用戶可定義的,可靈活地解決應(yīng)用的需求。箱式SMU提供了許多標(biāo)準(zhǔn)功能,能夠滿足許多工程師的常見(jiàn)需求。不難想象,這些標(biāo)準(zhǔn)功能并不能解決所有的應(yīng)用需求,特別是對(duì)于自動(dòng)化測(cè)試應(yīng)用。如果您需要定義示波器要進(jìn)行的測(cè)量,則應(yīng)選擇模塊化SMU,而不是具有固定功能的獨(dú)立式SMU,模塊化SMU可利用PC架構(gòu)的優(yōu)勢(shì),同時(shí)也讓您根據(jù)需求對(duì)應(yīng)用進(jìn)行自定義。
NI SMU可使用免費(fèi)的NI-DCPower驅(qū)動(dòng)軟件來(lái)完全編程。NI-DCPower是一個(gè)兼容IVI的儀器驅(qū)動(dòng)程序,隨附于NI電源或SMU中,并可與所有的NI可編程電源和SMU通信。NI-DCPower具有一系列操作和屬性,用于啟動(dòng)電源或SMU的功能,且該軟件包含了一個(gè)交互式軟面板。
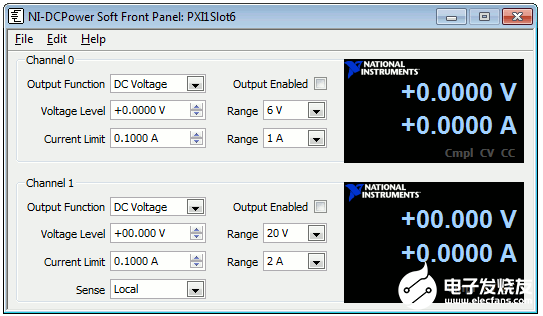
圖 12. 結(jié)合模塊化SMU使用軟面板快速進(jìn)行測(cè)量
除了軟面板,您還可使用NI LabVIEW、NI LabWindows?/ CVI、Visual Basic和.NET在NI-DCPower驅(qū)動(dòng)軟件中編程模塊化SMU,以實(shí)現(xiàn)針對(duì)各種應(yīng)用的常見(jiàn)和自定義測(cè)量。該驅(qū)動(dòng)程序還可支持LabVIEW內(nèi)基于配置的快速vi。
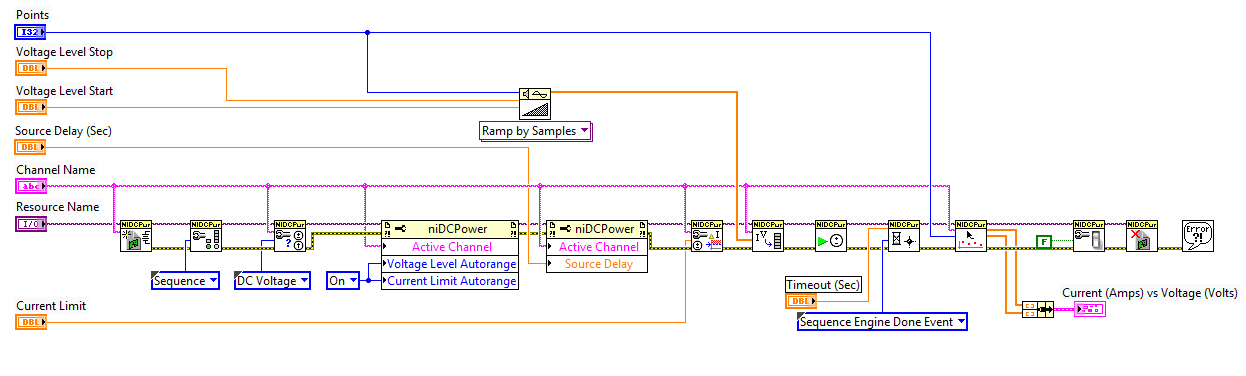
圖 13. 使用LabVIEW軟件編程模塊化SMU
12. 針對(duì)高精確度測(cè)量的連接功能
使用遙感進(jìn)行的測(cè)量有時(shí)也稱為四線感應(yīng),需要四條線連接到待測(cè)設(shè)備(如果開(kāi)關(guān)系統(tǒng)用于擴(kuò)展通道數(shù)的化,還需要四線開(kāi)關(guān))。當(dāng)輸出引線電壓顯著降低時(shí),使用遙感能夠?qū)崿F(xiàn)更精確的電壓輸出和測(cè)量。當(dāng)遙感用于直流電流輸出功能時(shí),電壓限制值是在感應(yīng)引線端進(jìn)行測(cè)量,而不是在輸出接線端。使用遙感測(cè)量DUT接線端的電壓比近端感應(yīng)測(cè)量更準(zhǔn)確。理想情況下,感測(cè)導(dǎo)線應(yīng)盡可能靠近DUT接線端。
另一個(gè)要考慮的方面的是隔離(guarding)。隔離是為了消除高輸入(HI)和低輸出(LO)之間的漏電流和寄生電容的影響。隔離接線端由HI接線端電壓之后的單位增益緩沖器驅(qū)動(dòng)。在使用隔離的典型測(cè)試系統(tǒng)中,Guard位于HI和LO接線端之間。通過(guò)這樣的連接, HI和Guard之間有壓降效為0 V,因此HI沒(méi)有任何電流泄露。Guard輸出和LO之間可能會(huì)有一些漏電流,但是,電流是由單位增益緩沖器提供,而不是HI,因此這并不影響SMU的輸出或測(cè)量。
舉個(gè)例子,NI PXIe-4138/4139的測(cè)量電路可以同時(shí)讀取輸出接線端(近端感應(yīng))或感應(yīng)接線端(遙感)的電壓值和電流值。這些測(cè)量由始終保持同步的兩個(gè)集成ADC進(jìn)行。
另外如圖10所示,NI PXIe-4138/4139的輸出接線器上具有Guard和Sense兩個(gè)接線端。您可以使用Guard接線端來(lái)實(shí)現(xiàn)電纜和測(cè)試夾具的隔離。如果啟用遙感時(shí),可以使用Sense接線端,從而補(bǔ)償電纜和開(kāi)關(guān)的電流-電阻損耗壓降。
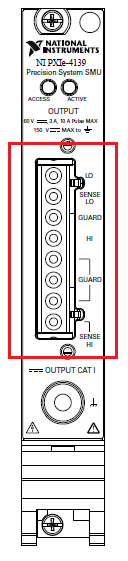
圖 14. NI PXIe-4138/4139 的輸出接線器上具有Guard和Sense兩個(gè)接線端。
13. 下一步
模塊化SMU能夠執(zhí)行與傳統(tǒng)儀器相同甚至更好的測(cè)量,同時(shí)提供了一個(gè)平臺(tái)來(lái)支持具有測(cè)量和通道功能的現(xiàn)代技術(shù),以滿足不斷變化的需求。然而,無(wú)論是購(gòu)買傳統(tǒng)SMU還是模塊化SUM,上述討論的因素都非常重要。提前考慮應(yīng)用需求、成本限制、性能和未來(lái)可擴(kuò)展性可以幫助您選擇最能滿足您所有需求的儀器。
責(zé)任編輯:gt














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論