 電子發(fā)燒友App
電子發(fā)燒友App


1、 引 言
某型導(dǎo)彈舵機(jī)系統(tǒng)是在導(dǎo)彈飛行過程主動段的執(zhí)行機(jī)構(gòu),當(dāng)導(dǎo)彈在主動段飛行時,在控制系統(tǒng)的控制下,舵機(jī)帶動燃?xì)舛嫫D(zhuǎn),改變主發(fā)動機(jī)噴出的燃?xì)馄D(zhuǎn)方向,產(chǎn)生控制力矩,控制導(dǎo)彈按照預(yù)訂的彈道飛行。該舵機(jī)為電動液壓式舵機(jī),是集精密機(jī)械、電子、液壓、自動控制等技術(shù)于一體的復(fù)雜設(shè)備,其輸入的信號有俯仰、偏航和滾動控制信號,由于其復(fù)雜的邏輯控制電路,信號交叉?zhèn)鬏敚D(zhuǎn)換節(jié)點(diǎn)繁雜,加上設(shè)備經(jīng)常處于運(yùn)輸顛簸野戰(zhàn)狀態(tài),工作環(huán)境惡劣,因而設(shè)備較容易出現(xiàn)各種故障。目前常用的舵機(jī)檢測手段都是傳統(tǒng)的手動方式對舵機(jī)的基本狀態(tài)參數(shù)進(jìn)行檢測,由于檢測儀通常采用性能單一的電路結(jié)構(gòu),功能單一,通用性差,操作繁瑣,易人為出錯,而且檢測項目十分有限,也不具備故障診斷功能,難以滿足戰(zhàn)場快速檢測和維修的需求,要完成此項工作通常還需配備其他的檢測儀器,如示波器等設(shè)備。為此,設(shè)計開發(fā)一種小型、通用和智能的,能對舵機(jī)系統(tǒng)進(jìn)行全面故障檢測與診斷,適合野外條件下使用的測試儀具有十分重要的意義。
該系統(tǒng)采用嵌入式計算機(jī)PC/104,PC/104與PC/AT體系結(jié)構(gòu)完全兼容,大小只有90mm×96mm,但它幾乎集成了普通臺式PC機(jī)的所有功能,并與之兼容,因此在PC機(jī)上開發(fā)的程序可以直接在PC/104 CPU模塊上運(yùn)行,與單片機(jī)系統(tǒng)相比省去了專用的開發(fā)工具,而且維護(hù)方便。PC/104采用模塊化設(shè)計,硬件電路設(shè)計簡單,減少了開發(fā)周期。因此在本系統(tǒng)中我們采用嵌入式計算機(jī)PC/104,與普通的工業(yè)控制機(jī)相比,PC/104具有如下特點(diǎn):
● PC/104模塊與PC機(jī)軟、硬件完全兼容,可以利用現(xiàn)有的較豐富和成熟的硬件、軟件開發(fā)工具及方法、設(shè)計知識等資源,開發(fā)周期短,成本低。
● PC/104模塊體積小,功耗低,無需散熱,可層疊,具有系統(tǒng)級的性能,芯片級的大小。
● 模塊之間采用獨(dú)特的縱向?qū)盈B或側(cè)向接插的結(jié)合方式,模塊層疊后四角還有支柱和螺釘固定,可靠性高,配置靈活方便,便于故障的排除和修理。
● 外圍模塊齊全,用戶可以選擇各種不同的功能模塊,設(shè)計滿足不同需要的專用系統(tǒng)。
● 工作溫度范圍寬,一般在0~70度。
● 大多數(shù)模塊采用單+5V電源,降低了系統(tǒng)對電源的要求。
2、故障診斷測試儀實現(xiàn)功能
該測試儀具有以下功能:
(1)測試功能
可對舵機(jī)系統(tǒng)的性能進(jìn)行綜合測試,測試內(nèi)容包括綜合測試、單項測試內(nèi)容。可根據(jù)需要進(jìn)行連續(xù)測試或單步測試;對測試結(jié)果可進(jìn)行自動診斷判別;對測試數(shù)據(jù)可顯示、打印記錄,或存入數(shù)據(jù)庫以便對舵機(jī)系統(tǒng)進(jìn)行質(zhì)量監(jiān)控。
(2)自檢功能
系統(tǒng)具有自檢功能,自檢范圍覆蓋全部測試通道。
(3)自診斷功能
系統(tǒng)具有自診斷功能,主要故障可判斷到電路單板。
(4)開發(fā)功能
設(shè)備具有良好的開發(fā)功能,經(jīng)開發(fā)可完成對通用舵機(jī)系統(tǒng)的性能測試。
3、 系統(tǒng)硬件設(shè)計
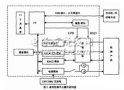
3.1硬件框圖,如圖1所:
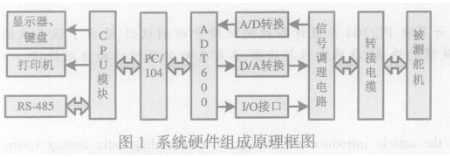
系統(tǒng)核心模塊采用SBS公司的SCM/SuperPT2,它采用Geode? MMX? with I/O Companion CX5530A?的CPU,16 KB L1反寫緩存;兩個串口,波特率可由軟件控制,其中COM2可設(shè)置為RS-485方式;一個并口;硬件平臺關(guān)鍵是PC/104總線的擴(kuò)展,通過數(shù)據(jù)緩沖和相應(yīng)的邏輯控制,擴(kuò)展出符合PC/AT協(xié)議的PC/10總線,它是擴(kuò)展其他外設(shè)的基礎(chǔ)。系統(tǒng)在PC/10總線基礎(chǔ)上擴(kuò)展了2M Flash、鍵盤接口、并口、顯示屏和通用串行碼采集接口。采集模塊選用SBS公司的SysExpanModule/ADT600,此模塊具有12位的分辨率,最大100KHz的采樣率,模擬輸入共有16通道,最大±10V輸入;4通道模擬輸出;24通道TTL/CMOS兼容I/O;3個16位、最大10MHz的定時/計數(shù)器;信號條理部分主要是將待測試信號變換成適合ADT600采集的信號[2]。
3.1.1 定時/計數(shù)器的配置
系統(tǒng)要求輸出頻率為5~13Hz的信號,則周期為200ms到80ms左右,如果采取1ms定時進(jìn)行D/A轉(zhuǎn)換的辦法,最小的一個周期輸出80個點(diǎn),經(jīng)過實際測試,能夠滿足測試對象對模擬激勵信號的要求;另外在采集測試對象執(zhí)行機(jī)構(gòu)的控制信號時采用1ms定時采集的辦法,也能滿足最后數(shù)據(jù)判斷的要求,因此定時器定時時間為1ms(即定時器的輸出時鐘為1KHz)。
3.1.2 D/A模塊
在本設(shè)計中,我們選擇SBS公司的SysExpanModule/ADT600數(shù)模轉(zhuǎn)模塊[2]。它是一種雙12位電流輸出的DACS(數(shù)據(jù)收集與控制系統(tǒng)),具有以下特點(diǎn):較寬的工作電壓(12V~15V);抗電源電壓干擾性能好;緊湊的封裝形式;低增益誤差。它可以和大多數(shù)的微處理器配合使用,能夠兼容TTL、CMOS電平。通過獨(dú)立的參考電壓和反饋電阻,還能夠提供四象限的乘法器功能。其內(nèi)部主要包括三個部分:控制邏輯電路、A路數(shù)模轉(zhuǎn)換電路和B路數(shù)模轉(zhuǎn)換電路。其中邏輯控制電路通過簡單的三個控制信號:CSA,CSB及WR來選擇相應(yīng)的模數(shù)轉(zhuǎn)換器,同時鎖存需要轉(zhuǎn)換的數(shù)據(jù)。A路數(shù)模轉(zhuǎn)換電路的基本控制原理為:通過CSA與WR控制信號,將12位的轉(zhuǎn)換數(shù)據(jù)一次鎖存入A路轉(zhuǎn)換電路的數(shù)據(jù)寄存器中,A路轉(zhuǎn)換電路開始進(jìn)行數(shù)模轉(zhuǎn)換,將轉(zhuǎn)換后的模擬量輸出。B路轉(zhuǎn)換電路的控制原理與A路類似。
3.1.3 A/D模塊
A/D模塊將舵機(jī)測試儀檢測裝置輸出的反饋信號轉(zhuǎn)化為數(shù)字量以便于計算機(jī)進(jìn)行處理。系統(tǒng)的控制精度在很大程度上取決于檢測反饋裝置的精度。根據(jù)檢測的反饋參數(shù)和系統(tǒng)性能指標(biāo)要求,本設(shè)計中采用SBS公司的SysExpanModule/ADT600模數(shù)轉(zhuǎn)換模塊[2]。它是一個12位逐次逼近型快速A/D轉(zhuǎn)換器,轉(zhuǎn)換速度最大為15微秒。ADT600片內(nèi)配有三態(tài)輸出緩沖器電路,因而可以直接與各種典型的8位或16位處理器相連,而無須附加邏輯接口電路,且能與CMOS及TTL電平兼容。
3.1.4 俯仰、偏航和滾動控制信號測試
舵機(jī)測試中的最重要內(nèi)容就是看執(zhí)行俯仰、偏航和滾動控制信號測試的結(jié)果是否與理論的控制結(jié)果一致。導(dǎo)彈在主動段飛行過程中執(zhí)行俯仰、偏航和滾動修正的是通過兩對電動機(jī)的控制開關(guān)來改變姿態(tài)控制發(fā)動機(jī)的噴出燃?xì)夥较颍栽撓到y(tǒng)就必須采集4路電機(jī)開關(guān)的控制信號。ADT600集成了uPD71055可編程外圍接口,用PA0~3來采集電動機(jī)的開關(guān)信號,采用1ms中斷采集一次信號,最后將采集的控制信號與標(biāo)準(zhǔn)的控制信號進(jìn)行比較,找出在切換時是否存在超前或滯后問題,以此來決定舵機(jī)性能的好壞。
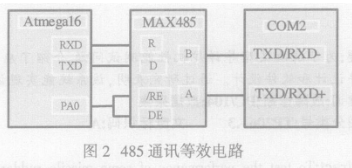
本測試系統(tǒng)要與測試對象進(jìn)行通信,為保證數(shù)據(jù)傳輸?shù)目煽啃裕覀儾捎肦S-485通信。系統(tǒng)在設(shè)計中采用兩個串口COM1、COM2,其中COM2可通過跳線設(shè)置為RS485方式[3],其應(yīng)用電路如圖2所示。
4、 系統(tǒng)軟件設(shè)計
系統(tǒng)測控軟件完成下述功能:
(1)控制測試系統(tǒng)進(jìn)行自檢和故障診斷;
(2)控制數(shù)字I/O卡、A/D采樣卡等進(jìn)行數(shù)據(jù)采集;
(3)輸出供測試用的控制信號、時鐘信號、模擬信號;
(4)對舵機(jī)系統(tǒng)進(jìn)行測試,并對測試結(jié)果進(jìn)行分析判定,將測試數(shù)據(jù)與判定結(jié)果寫入測試表格或數(shù)據(jù)文件中,同時在屏幕上顯示;
(5)故障診斷
由于舵機(jī)系統(tǒng)的復(fù)雜性以及修理人員對其認(rèn)識有限,性能檢測完畢,修理人員也很難確定故障部位。為此特別增加了此項功能,充分利用自檢的信息,準(zhǔn)確地提示故障部位,將故障部位縮小到板級甚至主要元器件上,為用戶提供了極大便利。
(6)提供打印、瀏覽測試文件功能,以便測試結(jié)果可永久保存和隨時查閱。
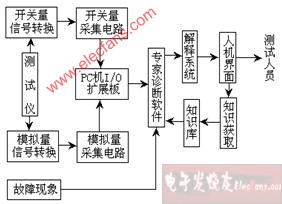
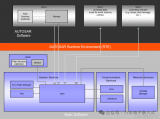
系統(tǒng)測控軟件是在Windows98環(huán)境下運(yùn)行由Borland C++ Builder6.0語言編寫,測控軟件由主菜單程序、自檢程序和測試應(yīng)用程序組成。該軟件采用模塊化結(jié)構(gòu),各程序塊之間相互獨(dú)立、自成系統(tǒng)。其軟件模塊組成如圖2所示。
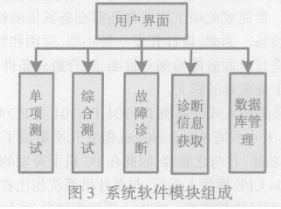
單項測試、綜合測試管理模塊主要負(fù)責(zé)對智能數(shù)據(jù)采集卡和通用信號測試卡(板)等控制使用管理,用來測試舵機(jī)的各種性能指標(biāo)參數(shù)、波形及時序,并實現(xiàn)對測試信號的記憶和分析。
診斷信息獲取管理模塊由數(shù)據(jù)采集,征兆數(shù)據(jù)庫和交互獲取三部分組成,它通過各種方式獲取與診斷推理有關(guān)的信息,如自動獲取、交互獲取等。有些信息可通過自動測試平臺自動獲取,而另一些難于獲得或需經(jīng)過專家分析后才能獲得的信息則必須通過交互方式得到[4]。
故障診斷模塊由框架推理、模型推理和規(guī)則推理三部分組成。它根據(jù)獲得的故障信息首先進(jìn)行框架推理,啟動故障征兆對應(yīng)的框架,然后啟動相應(yīng)的故障搜索樹模型框架,進(jìn)而進(jìn)行規(guī)則推理,直至將故障定位到可更換的單元。
數(shù)據(jù)庫管理模塊主要是將每次故障診斷與維修的結(jié)論生成維修情況報告表,如果故障征兆數(shù)據(jù)庫中沒有本次故障征兆,則將本次故障作為事例存入事例數(shù)據(jù)庫。
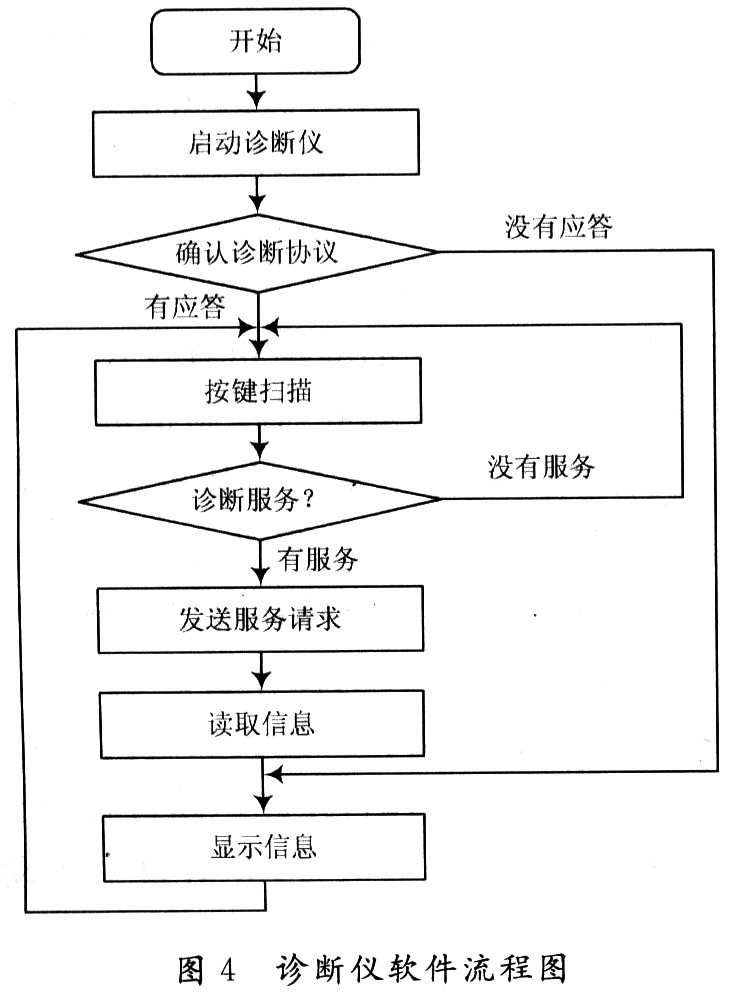
由于系統(tǒng)采用的是主要由軟件來控制的方式,因此這部分是此次設(shè)計的重點(diǎn)。進(jìn)行軟件控制的方式好處是易于修改,出現(xiàn)問題后易于發(fā)現(xiàn)與解決,從而具有較高的應(yīng)用前景。系統(tǒng)的軟件流程如圖4 所示。
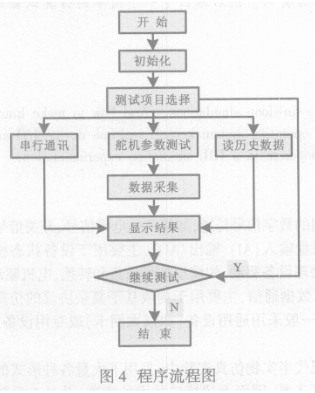
4 、程序流程圖
以下是Windows98環(huán)境下運(yùn)行由Borland C++ Builder6.0語言編寫源程序的主要部分:
以其中舵機(jī)安控特性測試為例,主要程序如下:
//-----------------------------------------------------------------------
void __fastcall TAnkong::TestClick(TObject *Sender)
{
char buf[20];
Test-》Enabled=false;
RichEdit1-》Clear();
this-》Refresh();
Ankongtest();*--------安控特性測試-------*/
sprintf(buf,“1舵: %7.3f deg”,OneAngel);
RichEdit1-》Lines-》Add(buf);
sprintf(buf,“2舵: %7.3f deg”,TwoAngel);
RichEdit1-》Lines-》Add(buf);
sprintf(buf,“3舵: %7.3f deg”,ThreeAngel);
RichEdit1-》Lines-》Add(buf);
sprintf(buf,“4舵: %7.3f deg”,F(xiàn)ourAngel);
RichEdit1-》Lines-》Add(buf);
if(DJNumber》4)
{
sprintf(buf,“5舵: %7.3f deg”,F(xiàn)iveAngel);
RichEdit1-》Lines-》Add(buf);
sprintf(buf,“6舵: %7.3f deg”,SixAngel);
RichEdit1-》Lines-》Add(buf);
}
Test-》Enabled=true;
}
//-----------------------------------------------------------------------
軟件的實現(xiàn)界面如圖5所示:
5、 結(jié)束語
本文作者創(chuàng)新點(diǎn):首先、成功采用了嵌入式計算機(jī)PC/104設(shè)計故障診斷測試儀,系統(tǒng)結(jié)構(gòu)小巧緊湊,性能穩(wěn)定可靠,控制簡單高效,人機(jī)界面友好;其次、設(shè)備的模塊化特點(diǎn)可以實現(xiàn)快速故障檢測和診斷功能;第三、開放式設(shè)計可以具有良好的通用性和擴(kuò)展性,能方便地推廣到其他舵機(jī)上使用。
責(zé)任編輯:gt











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論