 電子發燒友App
電子發燒友App


1 引言
在眾多大氣因子中, 風場資料是分析天氣演變最直觀和最有價值的資料之一。根據風場的演變,可以了解中小尺度等強對流天氣發生發展的某些重要物理過程。因此目前對大氣風場的研究受到越來越多的關注。
隨著大氣探測技術的發展,國內外用于探測大氣風場的設備也隨之增加。目前國內用于探測高空大氣風場的儀器主要有無線電探空儀、風能梯度塔、新一代多普勒天氣雷達、風廓線雷達以及微型探空飛機等。由于各種探測設備的工作原理、風場反演方法都存在差異,因此測得的大氣風場的精度必然存在差異。而高精度的大氣風場資料將對提高短時臨近預報的準確度起到非常重要的作用。因此,我們對各種測風資料的測量精度進行比較,了解產生誤差與不確定因素的某些原因,以便充分發揮風廓線產品在短時天氣預報和強對流天氣臨近預警預報中的作用。
另外,根據中國氣象局未來規劃,一個計劃由400座70—120米測風觀測塔組成的風能資源專業觀測網正在興建,風廓線雷達網絡也計劃在國內組建,飛機探測風場也成為一個發展趨勢。這些探測設備的建成可以真正彌補我國常規高空探測站網空間密度和時間密度的不足。同時,這些探測設備的探測精度如何也成為大家極為關注的問題,因此中國氣象局氣象探測中心組織本次試驗,對三種探測儀器測量精度的對比分析,不僅可以作為科學研究的依據,而且為雷達布網等工作提供理論支持。
2 各種探測儀器的原理
2.1 風廓線雷達及其風場反演方法
風廓線雷達又稱風廓線儀,顧名思義風廓線雷達提供的是風的廓線。在大氣中隨時存在著各種尺度的湍流,它們引起的折射指數的不均勻變化,對無線電波會產生散射作用。湍流存在于氣流之中并隨之移動,因此可以將湍流作為風的示蹤物。風廓線雷達就是以晴空湍流作為探測目標,利用大氣湍流對雷達電磁波的散射作用,探測大氣風場。
由于風是一個矢量,要求雷達的天線具有三個或五個正交波束,通過測定每個波束方向風速引起的多普勒頻移,在一定的假設條件下(湍流均勻、各向同性的假設下)就可計算出回波信號所在高度上的水平風向、風速和垂直氣流速度。在一次測量中,風廓線雷達可以得到同一時刻不同高度層的水平風速風向廓線和垂直氣流廓線。
基于風廓線雷達探測資料的風場反演方法常用速度-方位顯示方法(Velocity Azimuth Display),稱作VAD方法。
2.2 微型探空飛機及其風場反演方法
微型探空飛機是一種專門用于大氣探測實驗的氣象飛機。它具有自動導航、自動駕駛功能。它采用GPS導航,在自動控制系統控制下完成預定航線的飛行,并實時地將飛機的軌跡和其他資料傳送到地面,地面接收系統的微機顯示飛機的經緯度和高度等數據。微型探空飛機的風場反演方法有水平空速歸零測風方法和解析測風方法。本文采用水平空速歸零測風方法。
水平空速歸零測風方法就是利用微型無人駕駛飛機可以在很小的半徑范圍盤旋飛行的特點,使飛機在水平面上盤旋飛行,盤旋飛行一圈,相對空氣而言,飛機回到了同一點,水平空速矢量之和為零,平均水平風速等于飛機平均水平地速。飛機在空中飛行時,相對地面的運動稱為地速,相對空氣的運動稱為空速。空速(Vg)、地速(Va)和風速(V)的關系為:

由此可以看出這種方式得出的風速與日常業務測風的物理意義完全一致。
3 風廓線測量比較試驗及資料對比分析
為了對風廓線雷達、風能梯度塔、微型探空飛機的測量精度進行比較分析,2008年9月24日中國氣象局氣象探測中心組織相關人員在內蒙古錫林浩特國家氣候觀象臺進行對比試驗。本次試驗的探測設備分別采用北京愛爾達電子設備有限公司的工作頻率為1290M移動風廓線雷達(Airda3000型)、氣候觀象臺的100m風能梯度塔以及由江西省氣象科學研究所研制的微型探空飛機。據天氣預報介紹,試驗當天錫林浩特國家氣候觀象臺的天氣情況為“晴,西南風4-5級,溫度4-12°C”,天氣系統相對穩定,非常滿足試驗所需要的氣象條件。為盡量滿足探測區域天氣系統穩定的試驗條件,試驗進行時,三種探測設備的位置分布相對較近。風廓線雷達位于116°19′49.7″E,44°08′2.4″N,海拔高度為1107m,探測高度為50m-3400m;風能梯度塔位于116°18′44.9″E,44°08′32.4″N,海拔高度為1160m,探測高度為2m-100m;微型無人駕駛飛機指揮點位于116°19′54.8″E,44°07′42.1″N,探測高度人為控制。
3.1 風能梯度塔與風廓線雷達低層測風資料對比
根據探測設備的海拔高度和其探測高度,風能梯度塔可以分別得到海拔1162m的分鐘平均風速、海拔1164m、 1170m、1180m、1190m、1210m、1230m、1260m的分鐘平均風速及分鐘平均風向;而風廓線雷達低層高度分辨率為50m,因此僅能得到海拔1157m、1207m、1257m分鐘風速、風向。
本文首先對風能梯度塔1162m分鐘平均風速與風廓線雷達1157m分鐘風速進行比較,共選取相應時間的探測資料326組,風速差值由風能梯度塔測得的風速值減去風廓線雷達測得的風速值得到,具體比較結果如圖1所示:

圖1 風能梯度塔1162m分鐘平均風速與風廓線雷達1157m分鐘風速差的分布圖
從圖1可以看出,兩者的風速差分布相對比較均勻,風能梯度塔測得的風速值比風廓線雷達測得的風速值要偏大一些。經計算,風能梯度塔的平均風速為8.2m/s,而風廓線雷達的平均風速為7m/s,兩者的風速平均差為0.37m/s,標準差為1m/s(見表一)。
另外,本文分別對風能梯度塔1210m分鐘平均風速、風向與風廓線雷達1207m分鐘風速、風向以及風能梯度塔1260m分鐘平均風速、風向與風廓線雷達1257m分鐘風速、風向進行比較,分別選取相應時間的探測資料193組、165組、138組、146組。圖2、4的風速差是用風能梯度塔測得的風速值減去風廓線雷達測得的風速值得到的,而圖3、5測得的風向差則是由風廓線雷達測得的風向值減去風能梯度塔測得的風向值,具體比較結果如圖2、3、4、5示。
圖2、4顯示,風能梯度塔1210m、1260m平均風速與風廓線雷達1207m、1257m分鐘風速的偏差分布相對比較均勻,風能梯度塔測得的風速值比風廓線雷達測得的風速值明顯偏大。經計算,兩者的風速平均差分別為1.85m/s、1.76m/s;標準差分別為0.82m/s、0.83m/s。
而從圖3、5風向的對比來看,風向偏差的總體走勢趨于一致,且圖5前半段顯示,兩種測量手段的風向相差無幾,而后半段兩者的風向有了較大的變化,風向差也有所增大。經計算,兩者的風向平均差在1210m左右時為11°,1260m左右時為6.6°;相應的標準差分別為12.7°、11.1°(見表1)。
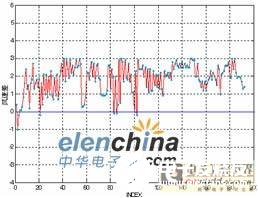
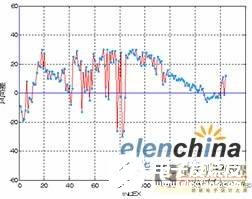
圖2、3 風能梯度塔1210m平均風速、風向與風廓線雷達1207m分鐘風速、風向的偏差分布圖
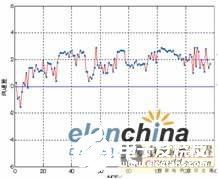
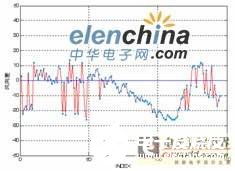
圖4、5 風能梯度塔1260m平均風速、風向與風廓線雷達1257m分鐘風速、風向的偏差分布圖

3.2 風能梯度塔、風廓線雷達、微型探空飛機三種探測設備的測風資料對比
本節采用9月24日下午13:30-15:00飛機試驗過程中得到的微型探空飛機數據,并選取相應時間相同高度層的風廓線雷達數據及風能梯度塔數據進行比較。得到的三種探測設備的風速、風向對比結果如圖6、圖7所示。本次比較共選取微型探空飛機、風廓線雷達資料各30組,而風能梯度塔由于受到高度限制,進入比較的數據只有9組。計算可得,探空飛機與風能梯度塔測得的風速非常相近,兩者平均差僅為0.9m/s.而與風廓線雷達測得的風速相差偏大,平均差達3.4m/s。
由圖7并結合計算數據可知,微型探空飛機測得的風向與風廓線雷達測得的風向非常吻合,兩者平均差僅為0.47°。而微型無人駕駛探空飛機與風能梯度塔的風向平均差為7.1°。
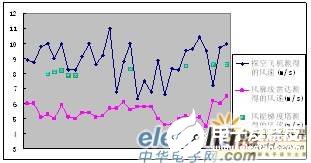
圖6 相同時間相同高度層三種探測設備測得的風速資料的對比
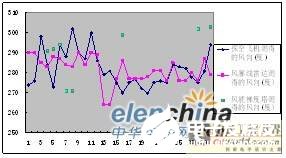
圖7 相同時間相同高度層三種探測設備測得的風向資料的對比
3.3 結果分析
本文共采用兩種方式對三種探測設備的獲得的測風資料進行對比分析,分析結果表明風廓線雷達最低層與風能梯度塔最低層數據比較風速差別較小,僅為0.37m/s。而風廓線雷達第二層、第三層數據與風能梯度塔相應層數據比較差別稍微偏大一些。另外,如圖6所示,1200m—1400m之間三種探測設備的探測數據比較結果表明微型探空飛機測得的風速與風能梯度塔測得的風速差別甚微,而與風廓線雷達測得的風速差別較大,平均差為3.4m/s,主要原因是進入比較的風能梯度塔數據偏少,另外,兩者的測風原理與風場反演方法差異太大也是造成這一結果的一個重要原因。圖7的風向比較顯示微型探空飛機與風廓線雷達、風能梯度塔測得的風向均有較好的一致性。
綜合上述比較結果,引起對比出現差異的主要因素有:(1)觀測方法的差異,即各種探測設備的探測原理各不相同,探測的目標也存在一定的差異,探測數據必然存在誤差;(2)數據處理方法的差異,即各種風場反演的方法存在很大不同。風廓線雷達測風是對其上空一定高度層及探測范圍內風的平均值;而風能梯度塔是對特定位置的風的測量,是對分鐘風的一個平均;飛機測量的是飛行周期內飛機經過軌跡點的風的平均;(3)有效數據的數量與質量,本文選取的數據均是經過剔除最大誤差后的數據,因此數據質量可以得到保證,但由于受到條件限制,能同時用于三種探測設備比較的數據量偏少,這也在一定程度上影響了比較結果的準確性;(4)資料的同時性和同地性,資料的同時性和同地性越好,得到的對比結果越具有參考價值,由于本次試驗過程中天氣系統相對穩定,探測設備間距很近,且各探測設備的時間分辨率均不大,因此本次實驗條件基本滿足同時性和同地性原則。
4 結論
通過對本次實驗獲取數據的比較分析,我們可以得出以下結論:
(1)風能梯度塔與其它兩種探測設備相比,它的優點是測量數據穩定可靠、耗資低,缺點是探測高度低,范圍小。
(2)與其它兩種探測設備相比,風廓線雷達探測不僅具有實時性的特點,而且探測高度高,范圍大,因此風廓線雷達的使用和布網可以改善我國探空資料站點不足的缺點,并且可以獲得實時風數據,為天氣預報提供更及時,更有價值的參考依據。從比較分析可知,風廓線雷達得到的數據較其它兩種探測設備明顯偏小,主要因為風廓線雷達得到的是一定范圍內風的平均值。
(3)微型探空飛機探測資料與其它兩種探測設備相比,其最大的優點是可人為控制飛機航線,探測方式靈活。從比較分析可知,微型探空飛機的探測數據與風能梯度塔的觀測數據相差不大,在誤差允許范圍之內。所以,微型探空飛機有較大的應用空間,不僅可以用于對人煙稀少的偏遠地區進行高空探測,而且可以用于特殊氣象條件或突發氣象事件的高空探測等工作。微型無人駕駛飛機可成為一種方便、經濟、靈活的低空探測工具。
責任編輯:gt










 工商網監
工商網監
評論