 電子發燒友App
電子發燒友App


1、CORDIC 理論
1.1、 坐標旋轉數字計算機CORDIC
坐標旋轉數字計算機CORDIC(COordinate Rotation DIgital Computer)算法,通過移位和加減運算,能遞歸計算常用函數值,如Sin, Cos,Sinh,Cosh等函數,由J. Volder于1959年提出 ,首先用于導航系統,使得矢量的旋轉和定向運算不需要做查三角函數表、乘法、開方及反三角函數等復雜運算。J. Walther在1974年用它研究了一種能計算出多種超越函數的統一算法 。
1.2、CORDIC原理
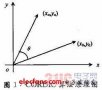
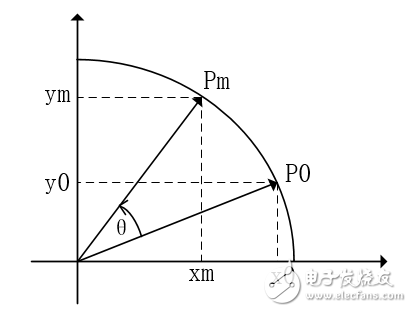
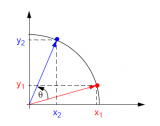
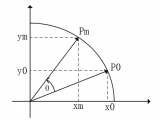
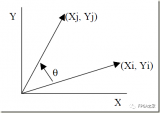
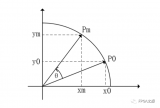
如圖所示,初始向量(X(0),Y(0))旋轉θ角度之后得到向量(X1,Y1),此向量有如下關系:
X1=X0*cos(θ)-Y0*sin(θ)=cos(θ)(X0-Y0*tan(θ))
Y1=Y0*cos(θ)+X0*sin(θ)=cos(θ)(Y0+X0*tan(θ))
假設初始向量經過N次旋轉之后得到新向量,且每次旋轉角度δ都是正切值為2的倍數,則第i次旋轉角度為δ-arctan(2^(-i)),即cosδ=(1/(1+2^(-2i)))^0.5。
容易得到角度θ≈∑S(i)●δ(i),其中S(i)=1或-1,表示旋轉角度的方向,
第i步旋轉可以表示為:
X(i+1)=((1/(1+2^(-2i)))^0.5)●(X(i)-S(i)Y(i)2^(-i))
Y(i+1)=((1/(1+2^(-2i)))^0.5)●(Y(i)+S(i)X(i)2^(-i))
其中(1/(1+2^(-2i)))^0.5)稱為校模因子,當旋轉次數一定時,趨于一個常數,Π(1/(1+2^(-2i)))^0.5)≈0.6073
這樣,算法每一步就可以簡化為:
X(i+1)=(X(i)-S(i)Y(i)2^(-i))
Y(i+1)=(Y(i)+S(i)X(i)2^(-i))
從而可以看出,對于移動的角度θ,現在只需要硬件加減法器和移位器就可以算出結果。引入Z,表示i次旋轉后相位累加的部分和,則:
Z(i+1)=Z(i)-S(i)arctan(2^(-i))
經過n次旋轉之后,Z→0,即與目標角重合,即:
X(n)=X1=X0*cos(θ)-Y0*sin(θ)
Y(n)=Y1=Y0*cos(θ)+X0*sin(θ)
1.3、三角函數的計算
以sin/cos計算為例,可利用正/余弦的和角公式遞歸進行:
cos(a+b) = cos(a)cos(b) – sin(a)sin(b) = cos(a) [cos(b) – tan(a)sin(b)]
sin(a+b) = sin(a)cos(b) + cos(a)sin(b) = cos(a) [tan(a)cos(b) +sin(b)]
取a=arctan(2^-k), 即tan(a)=2^-k, 則cos(b) – tan(a)sin(b) 可通過移位和減法來實現。
如果角度z可以表示為z = s0 arctan(2^0) + s1 arctan(2^-1) + ... + sn arctan(2^-n), 其 中s0, s1, ..., sn取+1或-1(+1可以理解為逆時針轉角,即加上一個角度; -1則相反) ,那么角度z的sin/cos計算可以通過一系列的移位和加減運算來實現。注意到cos(sk arctan(2^-k))=cos(arctan(2^-k)) 與轉角方向無關。此外,z應取第一項限角度(收斂域),對於其他項限角度,可由其第一項限對應角度變換得到。
相類似地,sinh/cosh的計算利用以下公式:
cosh(a+b) = cosh(a)cosh(b) + sinh(a)sinh(b) = cosh(a) [cosh(b) + tanh(a)sinh(b)]
sinh(a+b) = sinh(a)cosh(b) + cosh(a)sinh(b) = cosh(a) [tanh(a)cosh(b) + sinh(b)]
取a=arctanh(2^-k), 即tanh(a)=2^-k, 則cosh(b) + tanh(a)sinh(b) 可通過移位和減法來實現。如果參數z可以表示為z = s1 arctanh(2^-1) + s2 arctanh(2^-2) + ... + sn arctanh(2^-n), 其 中s1, s2, ..., sn取+1或-1 ,那么z的sinh/cosh計算可以通過一系列的移位和加減運算來實現。
z應取[-ln2, ln2]范圍內的值,否則應先預處理 z = z’– pln2, 求得cosh(z’)/sinh(z’)的值,則
cosh(z) = cosh(z’)cosh(pln2) + sinh(z’)sinh(pln2) = ?[cosh(z’) + sinh(z’)]2^p + ?[cosh(z’) – sinh(z’)]2^-p
sinh(z) = sinh(z’)cosh(pln2) + cosh(z’)sinh(pln2) = ?[cosh(z’) + sinh(z’)]2^p + ?[sinh(z’) – cosh(z’)]2^-p 。
sin/cos和sinh/cosh的計算是CORDIC算法的兩個特例,CORDIC算法可描述如下:
給定初始值x(0), y(0), z(0),
x(k+1) = x(k) – ms(k)y(k)2^-q(m,k), y(k+1) = y(k) + s(k)x(k) 2^-q(m,k), z(k+1) = z(k) – s(k)d(k),
其中m表示模式,q(m,k) 為移位序列,s(k) 取+1或-1表示旋轉方向,d(k) 為遞進角度。
1.4、CORDIC的MATLAB 運算
以cos(a)/sin(a)計算為例,m = 1, x(0) = 1, y(0) = 0, z(0) = a, s(k) = sign(z(k)),移位序列q(1,k): 0, 1, 2, ..., 遞進角度為d(k)=arctan(2^-q(1,k)) 。
下面是實現的Matlab程序:
z = a;
x = 0.6072529350; % scaled cos(0)
y = 0; % sin(0)
for i = 1:K
signZ = sign(z); % s(k) for rotation direction
xNew = x - signZ*y*2^(-(i-1));
y = signZ*x*2^(-(i-1)) + y;
x = xNew;
z = z - signZ*atan(2^(-(i-1))); % atan(2^-(i-1)) is included in a look-up table
end
x的初始值為cos(arctan(1)), cos(arctan(2^-1)), ..., cos(arctan(2^-K) 的連積值,收斂為0.6072529350。
以cosh(a)/sinh(a)計算為例,m = -1, x(0) = 1, y(0) = 0, z(0) = a, s(k) = sign(z(k)),移位序列q(-1,k): 1, 2, 3, 4, 4, 5, ... (3n+1重復兩次以保證收斂, 4, 13, 40, ...), 遞進角度為d(k)=arctanh(2^-q(-1,k)) 。
通過對初始值和旋轉方向s(k) 的選擇,模式m=0可以計算乘法和除法; 模式m=1可以計算sin/cos/arcsin/arccos/arctan; 模式m=-1可直接計算sinh/cosh/exp/arctanh/ln/sqrt, 間接計算arcsinh/arccosh,參見[1]。
2、CORDIC的現實意義
由于具有頻率精度高、轉換時間短、頻譜純度高以及頻率相位易編程等特點, 數控振蕩器(NCO)被廣泛應用于軟件無線電數字上、下變頻以及各種頻率和相位數字調制解調系統中。NCO傳統的實現方法主要有查表法、多項式展開法或近似法,但這些方法在速度、精度、資源方面難以兼顧。而采用CORDIC算法來實現超函數時,則無需使用乘法器,它只需要一個最小的查找表(LUT),利用簡單的移位和相加運算,即可產生高精度的正余弦波形,尤其適合于FPGA的實現。
數字控制振蕩器(NCO,numerical controlled oscillator)是軟件無線電、直接數據頻率合成器(DDS,Direct digital synthesizer)、快速傅立葉變換(FFT,Fast Fourier Transform)等的重要組成部分,同時也是決定其性能的主要因素之一,隨著芯片集成度的提高、在信號處理、數字通信領域、調制解調、變頻調速、制導控制、電力電子等方面得到越來越廣泛的應用。











 工商網監
工商網監
評論