 電子發燒友App
電子發燒友App


人工智能也稱機器智能,是一門研究人類智能機理和如何用計算機模擬人類智能活動的學科。經過50多年的發展,人工智能已形成極廣泛的研究領域,并且取得了許多令人矚目的成就。智能機器人技術綜合了計算機、控制論、機構學、信息和傳感技術、人工智能、仿生學等多學科而形成的高新技術,集成了多學科的發展成果,代表高技術的發展前沿。智能機器人的研究,大大促進了人工智能思想和技術的進步,漸漸成為一個備受關注的分支領域,各種智能機器人比賽也成為國內外廣泛推廣和發展的一種競技項目。
為實現機器人高速精確地按照規定路徑行走,要求機器人的CPU能夠實時迅速地讀取多個傳感器端口數值,并在較短的時間內完成對各端口數值的存儲、運算和輸出等多種任務。由于嵌入式微處理器對實時任務具有很強的支持能力,能夠完成多任務并且具有較短的中斷響應,因此在設計過程中選用以嵌入式微處理器ARM9為核心的控制器,其內部采用哈佛結構,每秒可執行一億一千萬條機器指令。本設計還設置了4路PWM控制信號輸出端口,用以驅動4路大功率直流電機,實現對轉速的精確調節;此外,還設置了7路Do數字輸出端口,用以驅動伺服電機、蜂鳴器、繼電器、發光二極管等。為了給龐大和復雜的程序提供更多的執行空間,本設計附加設置了100 KB的數據存儲器(RAM)和512 KB的程序存儲器(Flash ROM),用以存儲更多的數據和命令。
電源及采樣電路
電源是保證機器人穩定、可靠運行的關鍵部件,它直接影響著機器人性能的好壞。由于本機器人電機驅動和控制器采用兩種不同等級電壓的電源,為避免2個電源相互干擾,本機器人采用雙電源供電系統:電機電源采用高放電倍率聚合物鋰電池,容量為2 500 MAH,工作電壓為24 V,能提供40 A的穩定供電電流,是普通電池的10倍;控制器電源采用8.4 V鋰電池,并提供電壓采樣端口,以供電池檢測,電路圖如圖2所示。
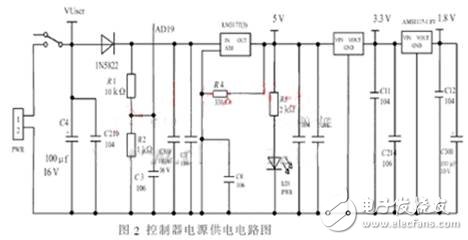
為獲得CPU各端口電路所需要的不同等級的電壓,本設計采用 1個LM317T三端穩壓器和2個AMS1117低壓差線性電壓調整器,并通過其附屬電路,得到精確穩定的5 V、3.3 V、1.8 V 三種電壓;采用1個發光二極管LD1和限流電阻R5作為電源指示燈,以顯示電源開關的狀態;為實時采樣電源電壓,防止鋰電池過放或過充,設計中通過R1、 R2分壓,引出AD19端口作為電源采樣端口。
直流電機驅動電路
由于競技比賽的需要,機器人要在避免碰撞的前提下盡可能提高速度,因此要求具有更大功率的驅動器和更靈敏的控制方式。為此本文采用的電機驅動電源電壓為16.8 V,電流為20 A;采用占空比范圍為0~95%的4路PWM信號控制直流電機,以實現精確的調速。
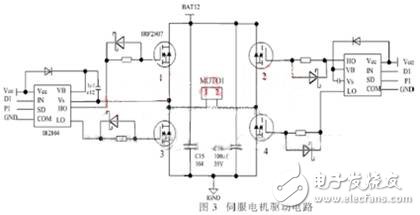
由于電機功率較大,并要求能實現雙向、可調速運行,本文設計了半橋式電力MOSFET管,成功實現了對電機的控制。如圖3所示,2路PWM信號通過 IR2104半橋驅動器(half-bridge driver)和相應保護電路連接至型號為IRF2807 的MOSFET管,控制電源與電動機連接線路的通與斷,達到控制電機速度的目的。當PWM信號占空比較大時,線路導通時間長,電機速度大;相反,當PWM 占空比較小時,線路導通時間短,電機速度小。4個MOSFET管在不同時刻導通組合,實現控制電機轉動方向:當MSFET管1和4導通時,電機端口1為正、2為負,電機正轉;當MOSFET管2和3導通時,電機端口2為正、1為負,電機反轉。
遠紅外火焰傳感器組
為能完成滅火任務,機器人必須能確定火焰的大致位置,并能對火焰是否被撲滅做出判斷。本文設計了由28個紅外接收管組成的2個遠紅外火焰傳感器組,前后每個方位各有14個紅外接收管組成,每2個并聯并指相同一個方向,2個傳感器組共指向14個方向,可以覆蓋360°范圍。如圖所示,14個端口通過CD4051八路轉換開關連接至ATMEGA8—16PC單片機,其中 SCK、MISO、MOSI為位選擇端口。此外,本設計還可以通過對14路讀取數據進行比較,從而確定其最大最小值及相應端口值,方便火源方位的確定。
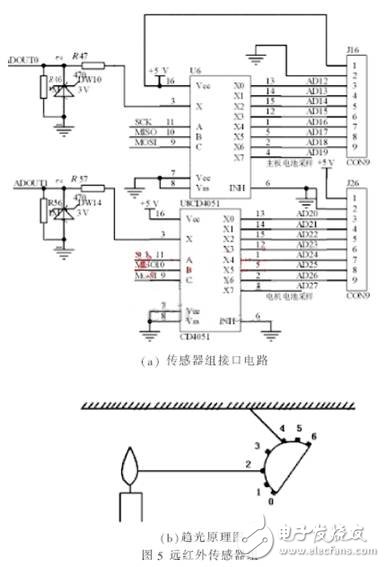
通過對遠紅外傳感器組的不同端口值的比較,還可以確定機器人和火源的相對位置,以判斷前進方向,完成趨光動作。當機器人與火源相對位置如圖5(b)所示時,可以讀取端口2和端口4的值,并進行作差,端口2的值大于端口4(說明2更靠近火源),則執行左拐命令,使其差值在一定范圍內,然后執行直行命令趨近火源。
地面灰度傳感器
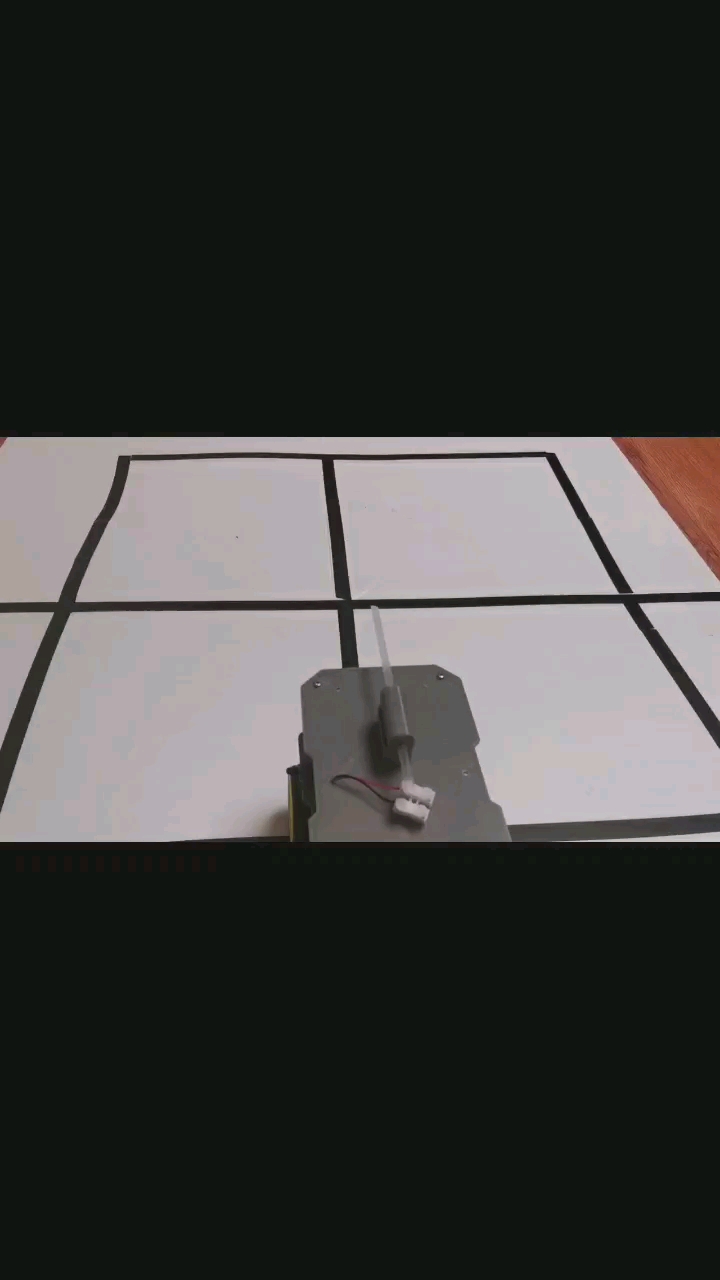
比賽規定,機器人起始位置是直徑為30 cm的白色圓,每個房間入口有一條3 cm寬的白線,其他地面均為黑色。機器人的啟動和停止及進房間的標志都要依靠對地面灰度的判斷,因此需使用能對地面反射光線的強弱做出反應的傳感器。本機器使用一對地面灰度傳感器,放置在前后兩端的底座上。地面顏色越深,其值越大,地面顏色越淺,其值越小。
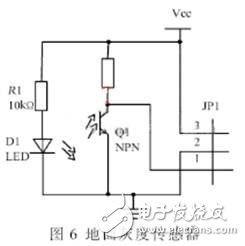
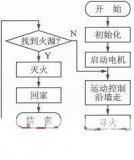
如圖6所示,地面灰度傳感器通過發光二極管LED照亮地面,地面的反射光線被光敏三極管接收,當地面顏色為黑色時,反射的光線比較弱,則光敏三極管的基極電流越小,集電極電流也相應較小,1端口電壓值較高,其測量值較大;反之當地面為白色時,反射的光線較強,集電極電流越大,1端口電壓值較小,測量值也較小。
本文研究并設計了基于ARM9嵌入式系統的一種智能滅火機器人,具有以下5個創新點:(1)采用了嵌入式系統內核,大大提高了機器人處理信號的能力;(2) 雙電源供電系統引入,使機器人的運行更加穩定可靠;(3) 采用PWM信號控制大功率直流電機,在速度和精度方面有了很大的改進;(4)通過合理選擇PSD測距傳感器的個數和安放位置,既滿足比賽要求,又能節約成本;(5)本文設計的遠紅外火焰傳感器組,很好地完成了對火源的精確定位任務,提高了滅火可靠性和快速性。實測證明,本文設計的機器人能夠很好地完成比賽任務,并且在可靠性和速度方面都有了大幅度的提高,具有很強的應用價值。










 工商網監
工商網監
評論