電子發燒友網站提供《基于DSP的工業機器人控制器的設計與實現.pdf》資料免費下載
2023-10-23 09:51:24 0
0 邁步手部康復外骨骼機器人,機器人可以帶動手指完成兩種康復運動——雙向彎曲運動和內收外展運動。機器人可適應不同患者的手指尺寸,外骨骼手的長度可調節,長時間佩戴不會使患者產生疲勞感。手部康復外骨骼機器人
2023-09-20 17:38:02
。 BEAR-H系列 外骨骼機器人是全球首款采用了柔性驅動器作為動力輸出的外骨骼機器人。 BEAR-H1 擁有帶動力的6關節(雙側髖、膝、踝),和髖
2023-09-20 17:25:48
機器人關節電機是專業為機器人關節設計研發生產。電機既有中空大孔徑,能保證關節模組完美融合的組合, 電機的定轉子機構緊湊,轉子采用了高性能稀土永磁材料,此系列電機轉矩脈動極低,易于速度控制和精確
2023-04-20 10:07:10
泰科關節機器人具備哪些優勢? 一、編程簡單可以讓無編程經驗的操作人員能快速設置和操作我們的直觀、3D 可視化協作式機器人。只需將機器人手臂移動至需要的位置,或觸摸方便易用的觸屏
2023-04-19 15:13:28
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-19 15:03:00
深圳泰科智能TA6系列協作機器人是泰科智能自主研發的6自由度的協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。 采用自主設計的RJS系列關節模組,既輕便靈活、運行平滑柔順,同時滿足
2023-04-19 11:14:26
TA6-R5協作機器人是泰科智能自主研發的6自由度的協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。 采用自主設計的RJS系列關節模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-19 10:58:47
RJU系列關節模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶可根據自身產品方向,自由定位
2023-04-19 10:53:03
RJU系列關節模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶可根據自身產品方向,自由定位
2023-04-19 10:48:11
機器人關節電機是專業為機器人關節設計研發生產。電機既有中空大孔徑,能保證關節模組完美融合的組合, 電機的定轉子機構緊湊,轉子采用了高性能稀土永磁材料,此系列電機轉矩脈動極低,易于速度控制和精確
2023-04-18 17:35:19
產品優勢專注機器人關節研發,RJS系列關節模組具有定位精度高、性能可靠等特點。 模塊化設計RJS關節模組集成無框電機、驅動器、諧波減速器、編碼器、制動器于一體,結構小巧緊湊,6軸RJS關節
2023-04-18 14:04:34
RJU系列關節模組——面向商業、生活服務類應用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶
2023-04-17 17:40:55
RJU系列關節模組——面向商業、生活服務類應用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶
2023-04-17 16:25:29
深圳泰科智能TB6系列協作機器人是泰科智能自主研發的6軸輕型協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。采用自主設計研發RJSII系列關節模組,既輕便靈活、運行平滑柔順,同時
2023-04-17 15:25:07
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-17 15:02:00
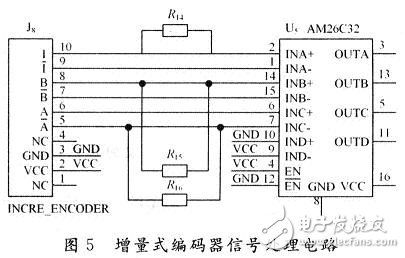
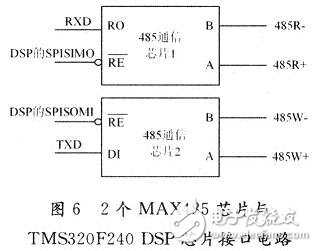
芯片TMS320L F2407A 控制器的接口電路,介紹了該芯片在多關節機器人控制系統中的使用。解碼器內部具有16 位硬件計數器,與CPU 接口方便,非常適合于多軸閉環運動控制系統的開發。[hide]/replyview]
2009-12-17 16:12:31
完成沿著X、Y、Z、(A、B、C)軸上的線性運動來進行的。 直坐標機器人 直坐標機器人控制系統 ? 關節機器人 關節機器人,也稱關節機械手臂或多關節機器人,其各個關節的運動都是轉動,與人的手臂類似。關節機器人是當今工業領域中最
2022-11-02 14:59:56 1339
1339 
主要是通過完成沿著X、Y、Z、(A、B、C)軸上的線性運動來進行的。直坐標機器人控制系統關節機器人關節機器人,也稱關節機械手臂或多關節機器人,其各個關節的運動都是轉
2022-10-27 11:19:41414 
基于DSP控制器的油氣安全智能巡檢機器人
2021-06-22 16:41:3637 機器人關節伺服控制系統設計與仿真
2021-06-22 14:53:1033 機器人關節是機器人各個零部件之間發生相對運動的機構。關節之中,單獨驅動的為主動關節,反之稱為從動關節。機器人關節模組通常采用超聲波電機、伺服電機、諧波減速器、VR減速器、行星齒輪箱電機等。
2021-05-28 09:11:441 在分析和研究高壓巡線機器人原控制器的基礎上,設計了一種基于DSP的全數字化控制器。該控制器采用主從式多處理器工作模式,用6個DSP對機器人12個關節的無刷直流電機進行伺服控制,采用高速CAN總線實現
2021-05-07 09:30:548 本課題的研究目標是以實驗室已有的有四個關節和一個末端執行器的采摘機器人為控制對象,研制四關節運動控制平
2021-05-05 13:18:00903 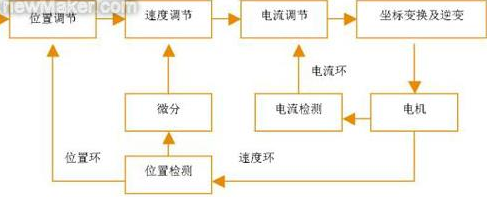
機器人控制器作為工業機器人最為核心的零部件之一,對機器人的性能起著決定性的影響,在一定程度上影響著機器人的發展。常用的機器人控制器有.
2020-08-18 16:39:115614 近日,伊朗機器人專家研發出了一種人形機器人Surena IV,能抓住水瓶還會寫字,號稱史上最先進的仿人機器人。
2020-02-17 09:18:32563 機器人控制器是根據指令以及傳感信息控制機器人完成一定的動作或作業任務的裝置,它是機器人的心臟,決定了機器人性能的優劣,從機器人控制算法的處理方式來看,可分為串行、并行兩種結構類型。
2019-10-14 14:39:1410477 仿人機器人,靈活度卻遠超人類,快到極致是種什么感覺?一起來體驗一下吧!
2019-05-30 17:43:322517 香港漢森機器人公司開發的人工智能仿人機器人索菲亞獲得了阿塞拜疆的旅行簽證,成為全球首個獲得簽證的機器人。
2018-10-31 08:43:384142 仿人機器人的研究最早可以追溯到上世紀中期,先是模擬人的手臂功能,到后來才開始對雙足機器人的研究。
2018-07-12 11:06:215018 的機械結構進行了設計;對機器人控制系統進行了設計,提出了一種基于DSP+ FPCJA的主控系統,將多CPU協同工作、分布式遠程控制技術應用到仿人機器人行走控制中;利用人類行走過程中各關節的轉動參數為輸入的控制方法,在ADAMS上進行了步
2018-03-02 15:59:301 針對雙臂機器人末端關節智能一體化問題,對雙臂機器人末端一體化關節的控制與驅動單元進行了系統設計,對設計原理及設計方法進行了歸納分析,綜合應用CAN總線技術與傳感器技術,并以數字信號處理器DSP與智能
2018-02-28 14:14:260 傳統的機器人運動控制器大部分是以嵌入式單片機為核心的,但其運算速度和處理能力遠不能滿足機器人控制系統飛速發展的需要,日益成為阻礙機器人技術進步的瓶頸。隨著以電子計算機和數字電子技術為代表的現代高技術
2017-10-23 14:36:281 平臺; 提出仿人機器人步態穩定控制與關節執行機構的優化; 針對運動中擺動肢體對機器人軸向影響帶來的不穩定的問題,設計仿人機器人豎直軸向的角動量補償算法。本文的主要研究工作如下: 1.搭建基于Matlab和Adams的離線仿真平臺,實現機器人多連桿模型的
2017-10-18 14:31:5139 ARM嵌入式系統的擬人機器人控制器的設計
2017-10-16 08:29:1912 仿人機器人的研制開始于上世紀60年代末,只有三十多年的歷史。1968年,美國的通用電氣公司試制了一臺叫Rig的操縱型雙足步行機器人機械。它只有踝和髖兩個關節,操縱者靠力反饋感覺來保持機器平衡,從而
2017-09-16 10:14:3520 仿人機器人 THBIP-I及其步態 (HumanoldrobotTHBIP,Iandits@alkinggait) 清華大學 自主研制的仿人機器人 呻 IP--重約 130kg,高 172cm,有
2017-09-16 09:14:598 特有的機械結構和數學模型,建立一個新型全數字的基于DSP和FPGA的機器人位置伺服控制系統的軟、硬件平臺,實現對四關節實驗室機器人的精確控制。
2017-09-01 11:25:4411 仿人機器人一直是自動控制領域研究的熱點。在模仿人類進行邁步行走時,由于仿人機器人的重心經常要處于中心線以外的區域,使得它的身體很難保持站姿平衡,能夠穩定地實現雙足行走是仿人機器人研究的重點也是難點。
2016-09-19 10:53:1947 ABB機器人的控制器電路圖,很實用,需要的時候用來查閱
2016-08-09 14:52:0316 仿人機器人復雜動作設計中人——體運動數據提取及分析方法(1)
2016-05-30 15:08:132 分析了運動控制器對機器人的重要性;提出了一種高性能的基于DSP芯片的運動控制器的整體設計方案,該控制器集控制電路、數據采集模塊和驅動電路于一體,能夠很好的完成機器人運
2013-05-27 17:16:2577 摘要:本課題以永磁同步電機為執行電機,采用三閉環位置伺服控制方案,直軸電樞電流為0的矢量控制策略,制作了以DSP為處理器的運動控制器;采用ACPM750E為電機功率驅動模塊,進行相應控制程序的設計。實驗結果表明基于DSP的機器人關節控制器的運動誤差在0.5%
2011-02-26 00:11:5954 仿人機器人一直是自動控制領域研究的熱點。在模仿人類進行邁步行走時,由于仿人機器人的重心經常要處于中心線以外的區域,使得它的身體很難保持站姿平衡,能夠穩定地實現雙足行走是仿人機器人研究的重點也是難點。
2011-01-23 16:42:371249 
智能控制器在機器人機械手位置控制中的應用
以JJR-1型教學機器人為基礎描述了智能控制器在機械手定位控制中的應用。對機器人機械手的肴關節進行了測試
2010-04-02 10:51:4531 本文提出了一種模糊神經網絡控制器,該控制器用于工業機器人關節驅動的位置控制,克服了傳統PID很難達到對非線性以及不確定因素的控制效果和簡單模糊控制不能完全消除穩態
2010-03-03 15:14:5718 完全自主型仿人機器人成為首個參加RoboCup的仿人機器人
用NI LabVIEW開
2010-02-23 10:56:341085 針對復雜環境下仿人機器人穩定控制的要求,設計了基于MEMS 慣性傳感器的仿人機器人足部姿態實時感知系統。同時,提出了基于慣性傳感器和足部力傳感器信息的系統累積誤
2010-01-20 14:09:3537 根據智能機器人的控制要求,提出了機器人控制系統的頂層核心控制器和底層運動控制器的雙層結構,底層與頂層基于CAN 總線完成關節狀態信息的上傳和運動指令的下達。在此基礎
2009-12-16 16:39:4029 基于DSP仿人機器人關節控制器設計
0 引 言 仿人機器人具有可移動性,具有很多的自由度,包括雙臂、頸部、腰部、雙腿等,可以完成更復雜的任務,
2009-11-24 09:36:491115 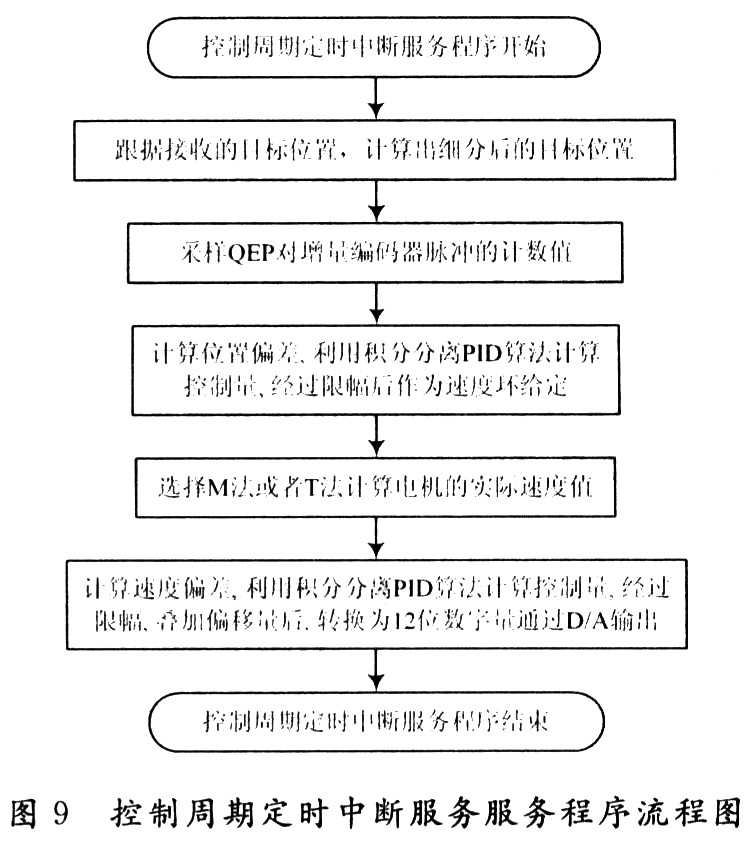
基于ARM9的嵌入式仿人機器人傳感器系統設計
0 引 言 傳感器技術是仿人機器人研究的關鍵技術之一。仿人機器人之所以能在已知或未知的環境中完成一
2009-11-10 09:29:52920 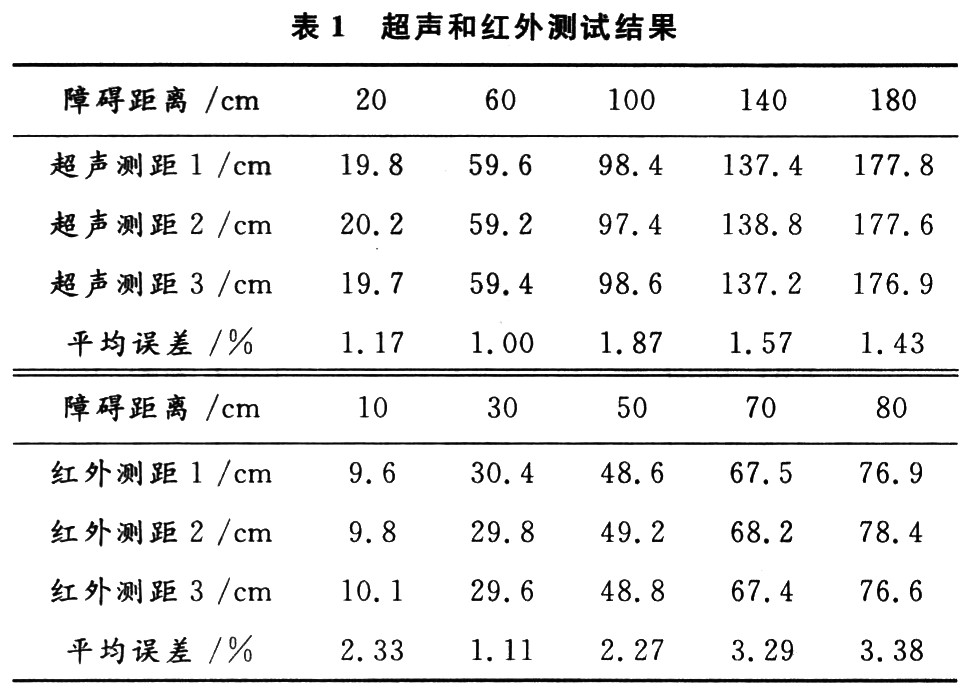
基于CAN總線和雙傳感器仿人機器人運動控制系統研究
機器人研究是自動化領域最復雜。最具挑戰性的課題,它集機械。電子。計算機。材料。傳感
2009-10-10 08:57:29761 
論述了由嵌入式計算機組成的3 層仿人機器人控制系統,并詳細介紹了其中的關節控制器。控制系統實行逐級控制,任務分散,提高了機器人的智能化程度。關節控制器選用TM320F2811
2009-08-05 10:51:4424 本文提出了一種以ARM9 為主控制器的新型的仿人機器人分布式控制系統。單片機和外部計數器組成關節控制器。主控制器和關節控制器之間采用USB 通信。從而實現了控制系統的小型
2009-05-25 15:57:4445
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論