 電子發燒友App
電子發燒友App


機器人要實現的動作和功能較多,需要多個傳感器對外界進行檢測,并實時控制機器人的位置、動作和運行狀態。系統中的所有任務最終都掛在實時操作系統μC/0S一Ⅱ上運行,因此不僅要考慮微控制器的內部資源,還要看其可移植性和可擴展性。LPC2129是Philips公司生產的一款32位arm7TDMI—S微處理器,嵌入256 KB高速Flash存儲器,它采用3級流水線技術,同時進行取指、譯碼和執行,而且能夠并行處理指令,提高CPU的運行速度。由于它的尺寸非常小,功耗極低,抗干擾能力強,適用于各種工業控制。2個32位定時計數器、6路PWM輸出和47個通用I/0口,所以特別適用于對環境要求較低的工業控制和小型智能機器人系統。因此選用 LPC2129為主控制器,可以獲得設計結構簡單、性能穩定的智能機器人控制系統。
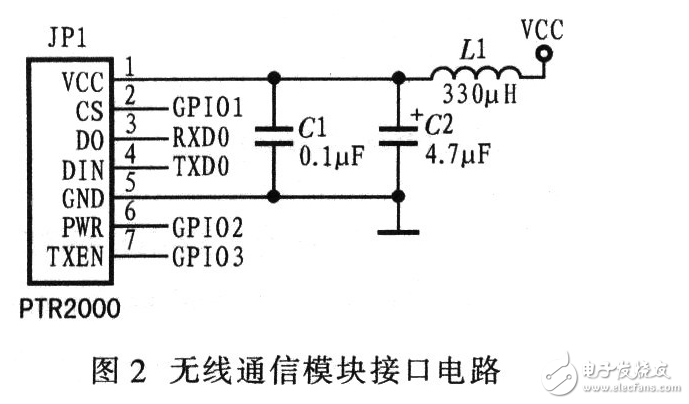
系統采用迅通公司生產的PTR2000無線通信數據收發模塊。電路接口如圖2所示。該模塊基于NORDIC公司生產的射頻器件nRF401開發,其特點是:①有兩個頻道可供選擇,工作速率高達20 Kb/s;②接收發射合一,適合雙工和單工通信,因而通信方式比較靈活;③體積小,所需外圍元件少,接口電路簡單,因此特別適合機器人小型化要求;④可直接接單片機串口模塊,控制簡單;⑤抗干擾能力強;⑥功耗小,通信穩定。
超聲波測距傳感器設計與實現
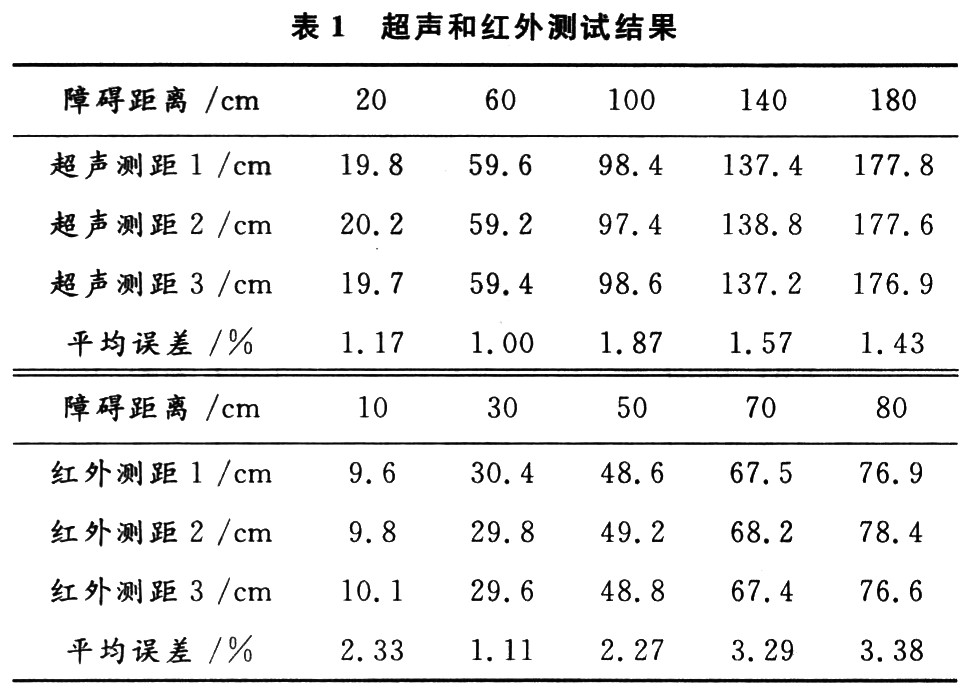
兩路超聲波傳感器用以控制機器人避開障礙物,并預測機器人相對目的地距離,起導航作用,其接收部分與微控制器的捕獲和定時管腳相連接。整個超聲波檢測系統由超聲波發射、超聲波接收和單片機控制等部分組成。發射部分由高頻振蕩器、功率放大器及超聲波換能器組成。經功率放大器放大后,通過超聲波換能器發射超聲波。
圖5給出由數字集成電路構成的超聲波振蕩電路,振蕩器產生的高頻電壓信號通過電容C2隔除掉了信號中的直流量并給超聲波換能器MA40S2S。其工作過程:U1A和UlB產生與超聲波頻率相對應的高頻電壓信號,該信號通過反向器U1C變為標準方波信號,再經功率放大,C2隔除直流信號后加在超聲波換能器MA40S2S進行超聲波發射。如果超聲波換能器長時間加直流電壓,會使其特性明顯變差,因此一般對交流電壓進行隔除直流處理。U2A為 74ALS00與非門,control_port(控制端口)引腳為控制口,當control_port為高電平時,超聲波換能器發射超聲波信號。
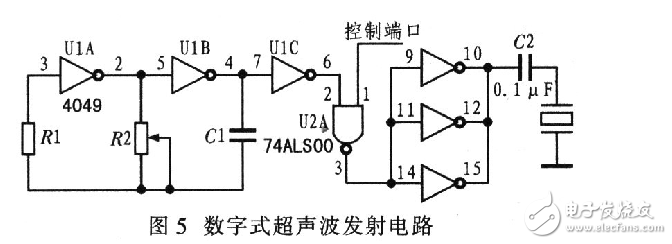
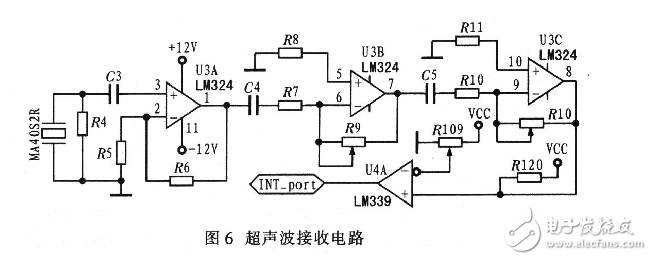
圖6示出為超聲波接收電路。超聲波接收換能器采用MA40S2R,對換能器接收到的信號采用集成運算放大器LM324進行信號放大,經過三級放大后,通過電壓比較器LM339將正弦信號轉換為TTL脈沖信號。INT_Port與單片機中斷管腳相連,當接收到中斷信號后,單片機立即進入中斷并對超聲波信號進行處理和判斷。
光電檢測模塊設計
設計光電檢測模塊,使機器人能夠檢測地面上的白色引導線。光電檢測電路主要包括發射部分和接收部分,其原理如圖3所示。發射部分的波形調制采用了頻率調制方法。由于發光二極管的響應速度快,其工作頻率可達幾兆赫茲或十幾兆赫茲,而檢測系統的調制頻率在幾十至幾百千赫茲范圍之內,因此能夠滿足要求。光源驅動主要負責將調制波形放大到足夠的功率去驅動光源發光。光源采用紅外發光二極管,工作頻率較高,適合波形為方波的調制光發射。
接收部分采用光敏二極管接收調制光線,將光信號轉變為電信號。這種電信號通常較微弱,需進行濾波和放大后才能進行處理。調制信號的放大采用交流放大形式,可以將調制光信號與背景光信號分離開來,為信號處理提供方便。調制信號處理部分對放大后的信號進行識別,判斷被檢測對象的特性。因此,該模塊的本質是將“交流”的、有用的調制光信號從“直流”的、無用的背景光信號中分離出來,從而達到抗干擾的目的。










 工商網監
工商網監
評論