 電子發燒友App
電子發燒友App


電源模塊
電源輸入端口是61板的能源供應中心,整塊板子的電源都是由此提供進去,可采用電池或穩壓電源提供5V輸入,并且必須至少保證電流在50mA以上,否則會造成系統無法倍頻和下載出錯。SPCE061A的內核供電為3.3V,由于I/O端口可接3.3V也可以接5V,所以在電源模塊中有一個端口電平選擇跳線J5用于選擇端口電壓,電源模塊參看圖,如下:
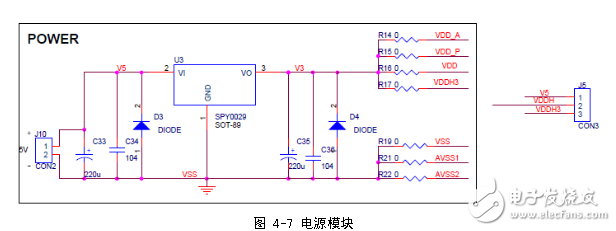
由于此系統需要的端口高電平為5V,所以圖當中的J5跳線需要跳到1和2上。
放音電路設計

將HM628128A中存儲的語音數據順序取出,解碼后,以8kHz的速率進行D/A轉換輸出,語音數據經電容濾波恢復成原始語音波形,最后用三極管驅動揚聲器放音。SPCE061A音頻輸出共有兩個DAC通道,DAC1和DAC2輸出的模擬電信號通過DAC1和DAC2引腳輸出。DAC的輸出范圍是0x0000~0xFFFF。DAC1和DAC2的輸出數據應寫入P_DAC1和P_DAC2單元。上電復位以后,兩個DAC均被自動打開,此時會消耗少量的電流(幾個毫安)。如若不需要,盡量關閉DAC輸出(將P_DAC_Ctrl單元的第一位置為1)。而且DAC的直流電壓必須保持平穩地變化,否則可能由于電壓的突變引起揚聲器產生雜音。為減緩電壓的變化幅度,從而輸出高質量的音頻數據可以采用ramp up/down技術。其應用條件是:被喚醒/上電復位后首次使用DAC時,上電復位功能應在被關閉/進入睡眠狀態之前。 放音利用的是SPCE061A內部的DAC,電路參看圖 4-8。圖中的SPY0030是凌陽公司的產品。和LM386相比,在工作電壓上,LM386需在4V以上,而SPY0030僅需2.4V(兩節電池)即可工作;在輸出功率上,LM386僅在100mW以上,而SPY0030可達700mW。
機器人硬件驅動電路
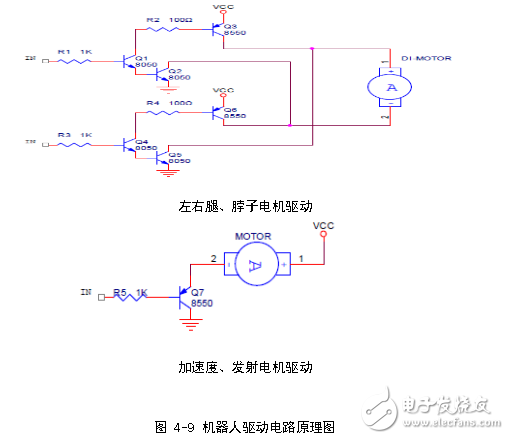
機器人驅動電路采用功率較大的三極管搭成H橋來驅動電機從而實現電機的正向旋轉與電機的反向旋轉,本系統中使用H橋驅動的電機包括兩個用于走路的電機與一個頭部轉向的電機。同時用了一個三極管驅動單向旋轉的電機,如加速電機與發射電機。
語音處理技術本身就是一門理論性強、實用面廣而且難度較大的綜合學科。而開發出具有語音功能的單片機也是相當困難的。凌陽unsp系列16位單片機,就是適應這種需求而設計的。凌陽SPCE061A實現語音識別其獨特之處在于:硬件電路簡單,因為SPCE061A是一款專門為語音信號處理設計的單片機,麥克風和喇叭可以直接接入,接放大電路可不用外接。具有一套高效的指令系統,軟件編程容易,有相應的API函數,可直接調用。










 工商網監
工商網監
評論