 電子發燒友App
電子發燒友App


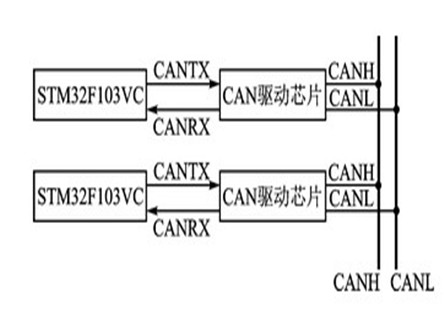
CAN(Controller Area Network)總線即控制器局域網絡,是現場總線之一,由德國Bosch公司為汽車的監測、控制系統而設計的總線式串行通訊網絡,適合于工業過程控制設備和監控設備之間的互聯。是一種多主方式的串行通訊總線,基本設計規范要求有高的位速率,高抗電磁干擾性,而且能夠檢測出產生的任何錯誤。主要應用于汽車電控制系統、電梯控制系統、安全監控系統、醫療儀器、紡織機械、船舶運輸等方面。CAN具有下下列主要特性:①低成本;②遠距離傳輸(長達lOKm);③高速的數據傳輸速率(高達 1Mbit/s);④可根據報文的ID決定接收或屏蔽該報文;⑤可靠的錯誤處理和檢錯機制;⑥發送的信息遭到破壞后,可自動重發;⑦節點在錯誤嚴重的情況下具有自動退出總線的功能。
基于arm7架構嵌入式系統的CAN接口硬件模塊包括Samsung公司的嵌入式微處理器S3C44BOX和Philips公司的CAN控制器芯片SJAl000和CAN總線收發器PCA82C250。8KB Cache、 Samsung S3C44BOX微處理器是三星公司專為手持設備和一般應用提供的高性價比和高性能的微控制器解決方案,它使用arm7TDMI CPU核,工作在66MHZ。為了降低系統總成本和減少外圍器件,這款芯片中還集成了下列部件:外部存儲器控制器、LCD控制器、4個DMA通道、2通道異步UART單元、1個同步串行口(SIO)、1個多主12C總線控制器、1個I Is總線控制器,5通道PWM定時器及一個內部定時器、71個通用I/O口、8個外部中斷源、實時時鐘、8通道10位ADC等。
CAN總線控制器
CAN總線控制器選用Philips公司的SJAl000。 SJAl000是一款獨立的控制器,用于汽車和一般工業環境中的控制器局域網絡(CAN)。它是PHILIPS半導體PCA82C200 CAN控制器(BasicCAN)的替代產品。而且,它增加了一種新的工作模式(PeliCAN),這種模式支持具有很多新特性的CAN2.0B協議。SJA1000是新一代CAN控制器,有如下特點:①和PCA82C200獨立CAN控制器引腳兼容及電氣兼容;②SJA1000有兩種工作模式:基本CAN模式(BASIC CAN)和增強CAN模式(PELI CAN),支持CAN2.0A/B協議;③同時支持11位和29位ID,位速率可達1M,具有總線仲裁功能;④擴展的接收緩沖器(64字節、先進先出FIFO),增強的環境溫度范圍(-40-+125℃);⑤檢錯和糾錯能力加強;⑥支持帶電插拔。
SJA1000方框圖如圖1所示。其中接口管理邏輯IML負責連接外部主控制器,該控制器可以是微型控制器或其它任何控制器。接口管理邏輯IML接收來自微控制器的命令,分配控制信息緩存器發送緩存器TBF、接收緩存器RBF0和RBF1,并為微控制器提供中斷和狀態信息。發送緩存器TBF由10個字節存貯單元組成,存貯由微控制器寫,將被發送至CAN總線網絡的報文。接收緩存器0和1(RBF0、 RBF1)均由10個字節組成,交替存貯從總線接收的報文,當一個緩存器分配給CPU,位流處理器可以對另一個進行寫操作。位流處理器是一個控制發送緩存器和接收緩存器(并行數據)與CAN總線(串行數據)之間數據流的序列發生器。位定時邏輯將SJA1000同步于CAN總線上的位流。驗收濾波器支持11 位和29位標識符的濾波,所有收到的報文由驗收濾波器驗收并存儲在接收FIFO。錯誤管理邏輯按照CAN協議完成錯誤界定。

CAN總線收發器
CAN總線收發器選用Philips公司PCA82C250產品。CAN總線收發器是CAN協議控制器和物理總線之間的接口,該器件對總線提供差動發送能力并對CAN控制器提供差動接收能力,有很強的抗電磁干擾(EMI)的能力,至少可掛110個節點。
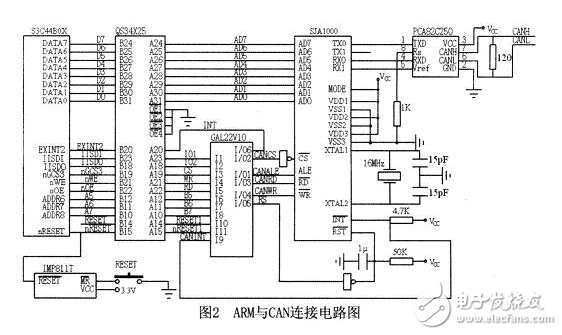
嵌入式系統的CAN接口電路
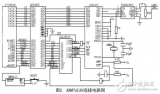
圖2是嵌入式微處理器S3C44BOX的CAN接口電路圖。如圖所示,ARM和SJA1000以總線方式連接,由于ARM信號為3.3伏,而CAN總線控制器電平為5伏,所以所有信號之間均需要電平轉換,本例中使用了QS34X245作為電平轉換芯片。 QS34X245為80引腳的雙例直插芯片,它既有電平轉換功能(5V變到3.3V),又是一個總線開關和隔離器件。QS34X245內提供一組32位高速CMOS兼容的總線開關,當輸出使能端OEn(n為1~4)為低電平時,開關通,連能總線A和總線B;當輸出使能端OEn為高電平時,則開關斷開,總線 A和總線B隔離。OE1控制總線A和總線B的低8位(即A7~A0和B7~B0),OE2控制A15~A8和B15~B8,OE3控制A23~A16和 B23~B16,OE4控制A31~A24和B31~B24。由于ARM總線非復用,而SJA1000總線復用,所以必須通過邏輯產生地址鎖存信號 ALE,在本例中該信號由芯片GAL22V10產生。SJA1000的片選、讀寫信號均采用arm總線信號,ALE信號由讀寫信號和地址信號通過GAL產生。在寫SJA1000寄存器時,首先往總線的一個地址寫數據,作為地址,讀寫信號無效,ALE變化產生鎖存信號;然后寫另外一個地址,讀寫信號有效,作為數據。上述邏輯完全通過GAL產生。此外,CAN總線需要在兩線問加一個120歐電阻。
控制CAN總線時首先初始化各寄存器,以設定通信參數(如:模式、位速率、驗收碼、屏蔽碼、字段長、總線定時、輸出模式等),BASIC CAN方式控制段共10個字節。發送數據時首先置位命令寄存器,然后將被發送的報文寫入發送緩沖區,最后置位請求發送,由 SJAl000完成發送。接收通過查詢狀態寄存器,讀取接收緩沖區獲得信息,然后釋放接收緩沖器。










 工商網監
工商網監
評論