 電子發燒友App
電子發燒友App


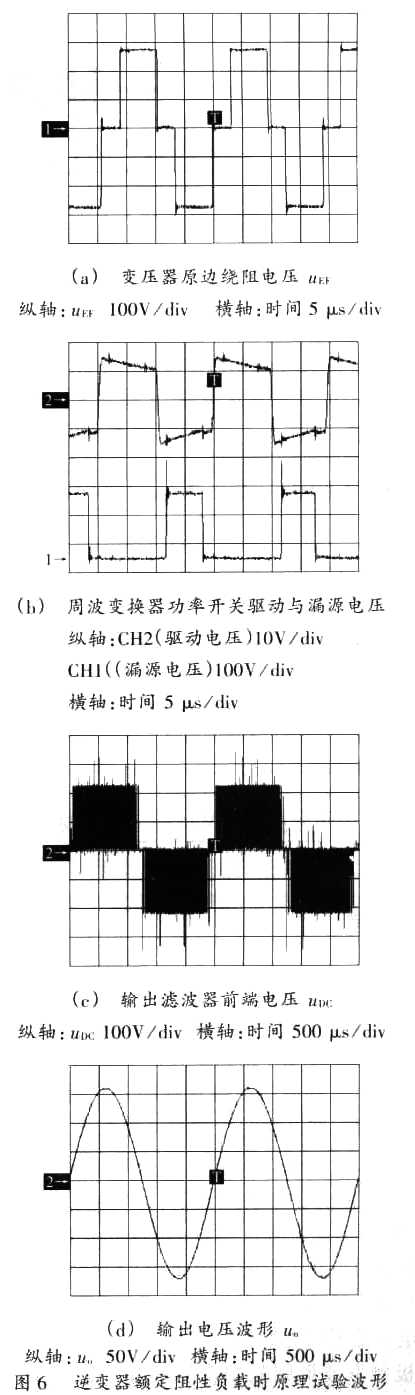
本文主要介紹的是關于單極性pwm的相關介紹,并著重對單極性pwm的原理圖及其應用進行了詳盡闡述。
單極性pwm原理圖分析
PWM的控制方式是對半導體開關器件進行通斷控制,使輸出得到一系列等幅脈沖,用以等效正弦波或所需要的波形,從調制脈沖的極性看,PWM又可以分為單極性PWM和雙極性PWM兩種。
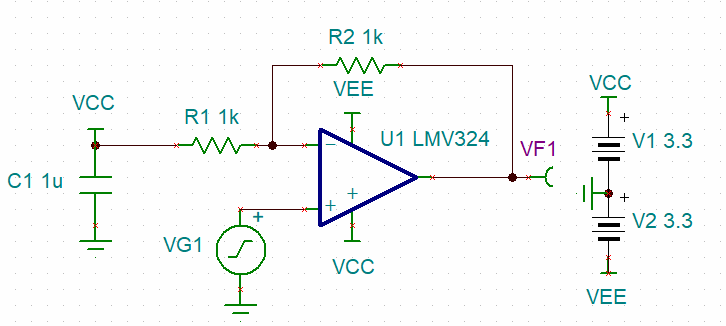
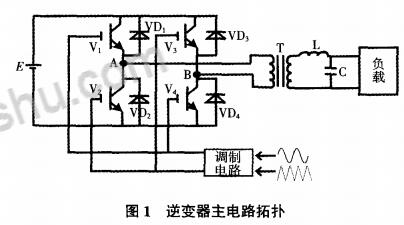
單極性PWM控制電路如下圖1所示:
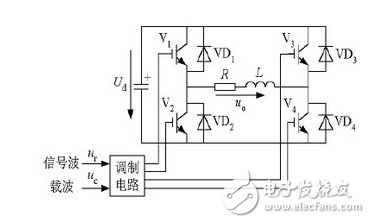
上圖中Ur為調制信號,Uc為載波信號。
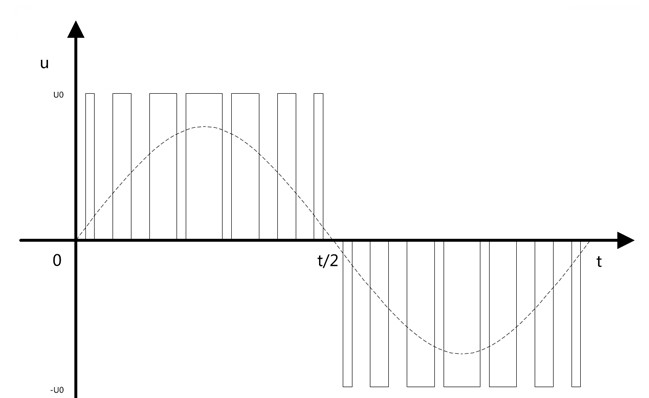
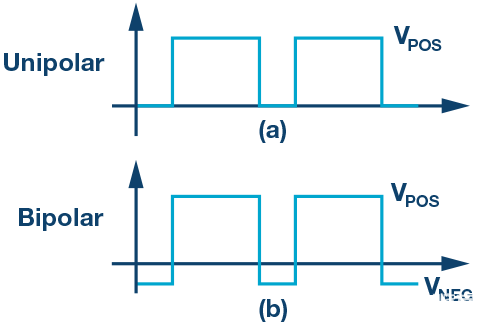
調制信號Ur為正弦波,載波Uc在Ur的正半周為正極性的三角波,在Ur的負半周為負極性的三角波。
在Ur的正半周,V1保持通態,V2保持斷態。
當Ur》Uc時使V4導通,V3關斷,Uo=Ud;當Ur
在Ur的負半周,V1保持斷態,V2保持通態。
當UrUc時,使V3關斷,V4導通,Uo=0。 形成如下圖2所示波形:

單極性調制方式的特點是在一個開關周期內兩只功率管以較高的開關頻率互補開關,保證可以得到理想的正弦輸出電壓,另兩只功率管以較低的輸出電壓基波頻率工作,但又不是固定其中一個橋臂始終為低頻(輸出基頻),另一個橋臂始終為高頻(載波頻率),而是每半個輸出電壓周期切換工作,即同一個橋臂在前半個周期工作在低頻,而在后半周工作在高頻,從而在很大程度上減小了開關損耗,且可使兩個橋臂的功率管工作狀態均衡,對于選用同樣的功率管時,使其使用壽命均衡,對增加可靠性有利。
針對輸出波形,相比于雙極性PWM模式,單極性PWM模式的輸出電壓中、高次諧波分量要小得多。
單極性pwm實際應用
隨著大功率半導體技術的發展,全控型電力電子器件組成的脈沖寬度調制(PWM)技術在雷達天線控制系統中得到了廣泛的應用。雷達天線控制系統一般采用脈沖寬度調制(PWM)技術實現電機調速,由功率晶體管組成的H橋功率轉換電路常用于拖動伺服電機。根據在一個開關周期內,電樞兩端所作用的電壓極性的不同分為雙極性和單極性模式PWM。
雙極性PWM功率轉換器中,同側的上、下橋臂控制信號是相反的PWM信號;而不同側之間上、下橋臂的控制信號相同。在PWM占空比為50%時,雖然電機不動,電樞兩端的瞬時電壓和瞬時電流都是交變的,交變電流的平均值為零,電動機產生高頻的微振,能消除摩擦死區;低速時每個功率管的驅動脈寬仍較寬,有利于保證功率管的可靠導通。但是,在工作過程中,四個功率管都處于開關狀態,開關損耗大,而且容易發生“直通臂”的情況;更嚴重的情況在于——電機電樞并非絕對的感性元件,在電機不動時,由于此時通過電樞上的交變電流,電樞的內部電阻會消耗能量,造成了不必要的損耗,降低了功率變換器的轉換效率。
單極性PWM功率轉換器中,一側的上、下橋臂為正、負交替的脈沖波形,另外一側的上橋臂關斷而下橋臂恒通。在工作時一側的上、下橋臂總有一個始終關斷,一個始終導通,運行中無須頻繁交替導通,因而減少了開關損耗;在PWM占空比為0%時,電機停止,H橋完全關斷無電流通過,此時電機的內部電阻不消耗能量;由于單極性比雙極性PWM功率變換器的電樞電路脈動量較少一半,故轉速波動也將減小。但是,單極性和雙極性PWM都存在可能的“直通臂”情況,應設置邏輯延時。
在進行H橋功率轉換電路設計的時候。需要解決一個基本的問題一高端門懸浮驅動。通常有如下幾種方式:第一,直接采用脈沖變壓器進行隔離及懸浮;第二,采用獨立的懸浮電源;第三,動態自舉技術。前兩種方法使用時大量使用分立元件,增加了調試難度、電路的可靠性變差、印制電路板的面積相應變大。而動態自舉技術目前已被許多專用電路采用,此類產品集成度高、體積小巧、性能穩定、使用單一電源即可對柵極驅動。但是此類器件在使用時,必須外接自舉二極管和自舉電容,并連接合適的充放電回路,組成一個動態自舉電路。這個動態自舉的過程必須是循環往復的,才能保證H橋高端柵極的開通和關斷。下面設計的單極性PWM電路將會解決上述問題。
1 H型單極性PWM的設計
1.1 脈沖分配電路的設計
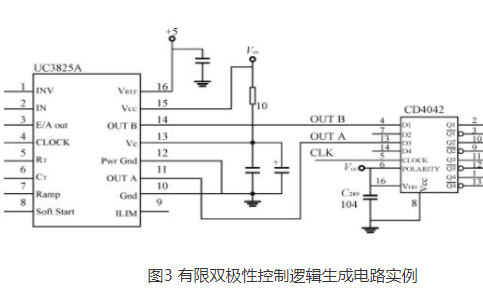
在這里,我們首先設計了一個單極性PWM脈沖分配電路,如圖1所示。輸入信號包括一個方向信號和一個脈沖寬度調制信號,這兩個輸入信號經過脈沖分配便產生單極性PWM脈沖。信號地和功率地通過高速光電耦合器隔離。調節脈沖寬度調制信號的占空比即可調節單極性PWM脈沖的占空比。這里的方向信號用來切換電動機轉動的方向,這種做法區別于雙極性PWM中的轉動方向靠PWM的占空比來決定的做法。值得注意的是圖1中的NE555電路,起到脈沖檢測的作用。當脈沖寬度調制輸入信號脈沖丟失時,此時輸出低,將低端強制拉低,整個H橋關斷。電路的仿真波形如圖3所示。
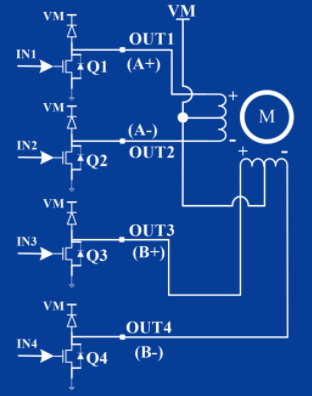
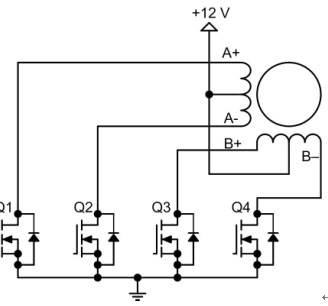
1.2 驅動和功率轉換電路設計
脈沖分配電路產生的單極性PWM脈沖,送入半橋驅動器放大。如圖2所示,國際整流器公司生產的IR2308和由IGBT組成的H橋驅動和功率轉換電路。IR2308在驅動高端柵極時,必須外接自舉二極管和自舉電容,當Vs腳通過低端IGBT和電機負載拉到地時,自舉電容由直流+18 V通過自舉二極管對電容充電;低端IGBT關斷時,電容通過IR2308的內部推挽結構經HO腳對高端IGBT柵極充電,使其飽和導通。IR2308內部死區保護單元為IGBT開關延時提供了死區時間,消除了“直通臂”的現象。在正常工作時,由于對側低端的IGBT始終開通,故此時自舉電容可以通過電機負載對地充電,減小了因對高端柵極的充電導致的自舉電壓降的波動,可以看出這是一個動態自舉的過程。
1.3 自舉元件的計算
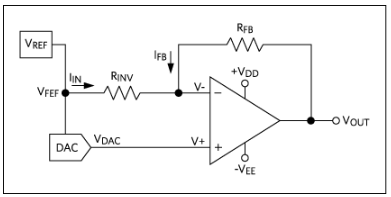
自舉元件參數的選擇對自舉效果存在重要影響。以下方程詳述了自舉電容提供的最小充電電荷:
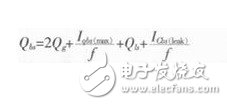
其中:Qg為高端IGBT的門電荷,f為工作頻率,ICbs(leak)為自舉電容漏電流(使用瓷片電容時可忽略),Iqbs(max)為最大VBS靜態電流,Qls為每個周期的電平轉換所需要的電荷。自舉電容必須能夠提供上述電荷,并且保持滿電壓,否則可能會導致自舉電壓產生很大的紋波,當低于自舉電壓欠壓封鎖電壓時,使得高端輸出停止。因此自舉電容上的電路至少要取公式(1)計算值的兩倍才比較穩妥。
其中:Vcc為邏輯電路部分的電壓源,Vf為自舉二極管的正向壓降,VLS為低端IGBT上的壓降,VMin為‰與Vs之間的最小電壓。自舉電容漏電流ICbs(leak)僅與自舉電容是電解時有關,如果采用其他類型的電容,則可以忽略,因此盡可能使用非電解電容。自舉二極管必須能夠承受線路中的所有電壓;在圖2的電路中,當高端IGBT導通并且大約等于母線電壓Vbus時,就會出現此現象。自舉二極管的高溫反向漏電流特性在那些需要電容來保存電荷-段延時時間的應用中是一個重要的參數。同樣,為了減小由自舉電容饋入電源的電荷,應選用超快速恢復二極管。推薦自舉二極管的特性如下:最大反向電壓:VRRM≥母線電壓Vbus;最大反向恢復時間:trr≤100 ns;正向電流:IF≥Qbsf。
2 實驗驗證
2.1 實驗方法和器件參數選取
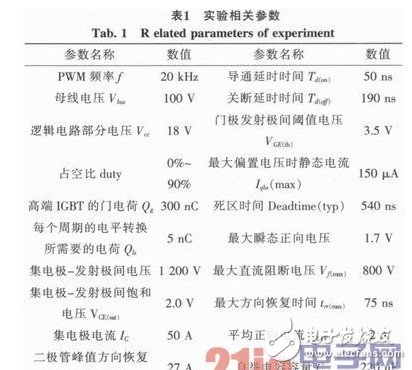
本實驗由TI公司的TMS320LF2407A DSP自身的PWM發生器產生頻率f=20 kHz的脈沖寬度調制信號,PWM的占空比可調范圍為0%~90%,同時使用I/O口輸出方向信號;電動機采用100 V/2 A的直流伺服電機,電樞回路總電阻Ra=8.1 Ω。
使用H橋電路驅動100 V/2 A的直流伺服電機,所以要求H橋的母線電壓Vbus是100V,流過各開關的最大電流為2 A。因此電橋使用的IGBT的集電極一發射極間電壓VCES的絕對最大額定值應該大于100 V,集電極電流IC的最大額定值在2 A以上。對于電動機這樣的感性負載,當驅動電壓突動機產生的反電動勢燒壞開關器件,在H橋各開關中必須接入續流二極管,用于吸收反電動勢。很多開關用IGBT在集電極和源極之間內藏續流二極管,因此二極管的應該滿足峰值恢復電流Irr大于2 A(100 V/2 A的直流伺服電機),反向電壓UR應該大于H橋供電電壓100 V。仙童公司生產的IGBTFGA25N120滿足上述要求,參數裕量很大,如表1所示。將表1中相關參數帶入公式(1)得出自舉電容提供的最小充電電荷Qbs=612.5 nC,代入自舉二極管正向電流公式即可計算出自舉二極管正向電流Ip≥12.25 mA,綜合考慮上面推薦的自居二極管特性,我們選用HER207。將最小充電電荷Qbs帶入公式(2)得到最小的自舉電容值C≥113.4 nF,選用220 nF的高壓瓷片電容。
2.2 雷達天線實際應用中的效果
如圖2所示,H型雙極性PWM的電機電樞兩端平均電壓可以表示為:
UAB=τ(Vbus-2VCE(sot)),τ為占空比 (3)
當τ=0%時,此時UAB=0 V,電動機停止轉動。測得邏輯控制端,HIN1=0、LIN1=0、HIN2=0、LIN2=0,此結果與圖3(c)仿真邏輯一致。因為此時H橋的4個IGBT全部關斷,故此時不存在開關損耗;盡管電動機存在內部電阻,但此時沒有電流流過H橋,電動機也不消耗能量。當τ=100%時,其結果與τ=0%時完全相同。當τ=90%時,這個時候電壓的占空比很寬,天線處于一個比較高的轉速,測得流過電機電樞平均電流Iov為1.72 A,由(3)計算出電樞兩端平均電壓UAB=86.4 V,那么電源輸入功率為:
Pout=UABIov=86.4Vx1.72 A≈148.61 W (4)
電樞回路總的銅損耗為:
Ploss=Iov2Ra=(1.72 A)2x3.91 Ω≈23.96 W (5)
此部分能量浪費在電樞內部電阻上,轉變為熱能。由直流電動機穩態運行時的基本方程式:
UAB=Ea+EovRa (6)
其中:Ea為電動機的感應電動勢式(6)兩邊同時乘以Iov:
UABIov=EaIov+Iov2Ra (7)
即:Pout=PM+Ploss (8)
故電磁功率為:
PM=Pout-Ploss=148.61 W-23.96 W=124.65 W (9)
此部分功率由電功率轉換為電磁功率,從而拖動天線,測得天線的實際轉速n=6 r/min。此時的轉換效率為:
H型雙極性PWM的電機電樞兩端的平均電壓可以表示為:
UAB=α(Vbus-2VCE(sot)-(1-α)(Vbus-2VCE(sot))=(2α-1)(Vbus-2VCE(sot)),α為占空比 (11)
當α=50%時,此時UAB=0 V,電動機停止轉動。但是此時電機電樞兩端的電流是交變通斷的,因此會消耗功率電樞內部電阻上,同時IGBT由于每個周期的交替導通和關斷,會存在4個IGBT開關損耗。與單極性PWM占空比α=90%相對應的雙極性PWM占空比為UAB=95%,此時電樞兩端平均電壓=86.4 V。但在一個開關周期里,比單極性PWM電路要多出兩個IGBT開關損耗,同時電樞內部電阻在整個開關周期里都消耗功率。因此可以發現,雙極性PWM較單極性PWM電路在拖動天線時,浪費在開關損耗和銅損上的功率更多,從而導致轉換效率的降低,也降低了天線的轉速。
結語
關于單極性pwm的介紹就到這了,希望通過本文能讓你對單極性pwm有更深的了解。











 工商網監
工商網監
評論