 電子發燒友App
電子發燒友App


三相異步電動機的制動控制
三相異步電動機從切除電源到完全停止旋轉,由于慣性的原因,總需要一段時間。但實際工業生產中,很多生產機械在運行過程中都要求安全和準確定位、以及為了提高勞動生產率,都需要電動機能迅速停車,所以要求對電動機進行制動控制。
制動方法:機械制動
電氣制動—— 反接制動
能耗制動
•機械制動——利用機械裝置使電動機在切斷電源后迅速停轉
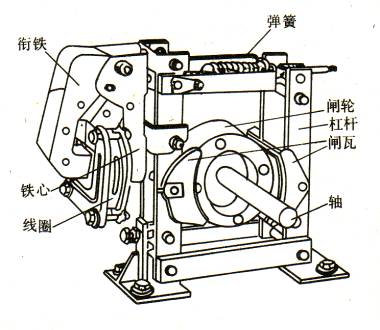
普遍方法——電磁抱閘 電磁鐵
閘瓦制動器
彈簧抱閘示意圖:
當電磁鐵1得電時,制動瓦2被吸起與制動輪4脫離,與制動輪相連的電動機可自由轉動。當電磁鐵失電時,在彈簧3的作用下,制動瓦壓緊制動輪使電動機無法轉動。
電磁制動器常用于防止起重機械失電時重物下跌和需要準確定位的場合。

電氣制動
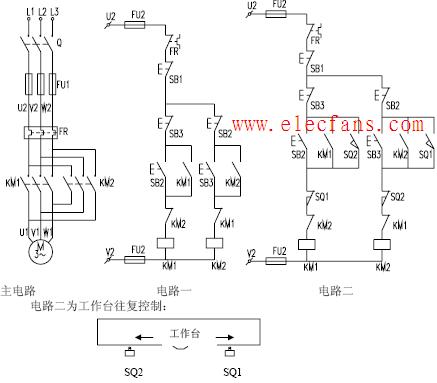
5) 反接制動控制線路
反接制動:改變電動機電源的相序→定子繞組產生相反方向的旋轉磁場→產生制動轉矩
特點:定子繞組中流過的反接制動電流相當于全電壓起動時電流的兩倍
制動迅速、效果好、沖擊大,適用于10kW以下的小容量電動機
為減小沖擊電流,通常在電動機主電路中串接電阻以限制反接制動電流
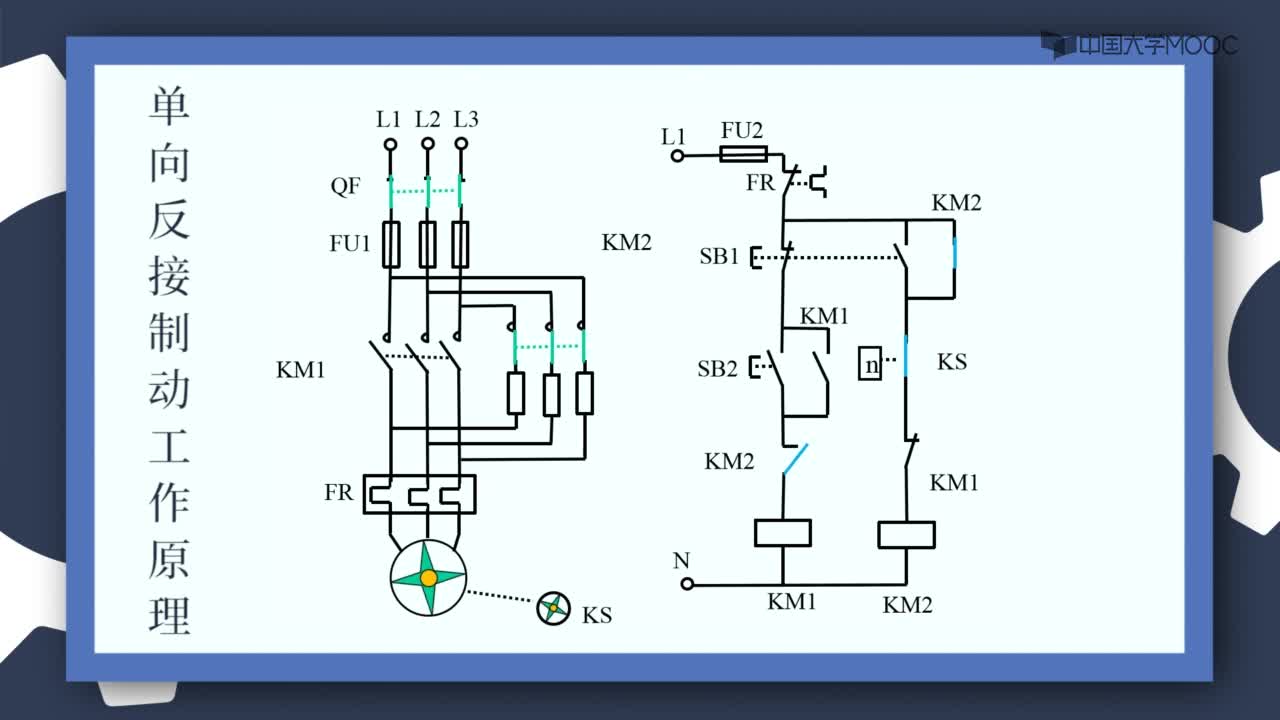
1) 單向反接制動控制線路
要求:電動機電源相序的改變;轉速下降接近于零,及時自動切斷電源,防止反向起動
措施:采用速度繼電器檢測電動機的速度變化
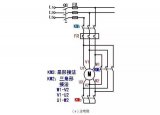
控制線路:教材P42 Fig 2-15
控制回路:
(1) SB2按下→KM1線圈得電并自鎖→主觸頭吸合→電動機起動正常運轉→速度繼電器
KS常開觸頭閉合→為反接制動作好準備
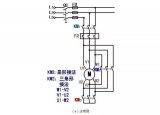
(2) 停車時:
SB1按下→ 復合觸頭的常閉觸點斷開→KM1失電→電動機脫離電源 →
復合觸頭的常開觸點閉合(KM1的輔助常閉復位)
電動機因慣性在脫電后仍保持較高轉速→KS的常開仍閉合 →
KM2得電并自鎖→主觸頭吸合→ 接入反接制動電阻R
電動機獲得相反相序的三相電源
進入反接制動→轉速迅速下降接近于零→KS常開觸點復原(斷開)→KM2失電→
電動機電源切斷→反接制動結束
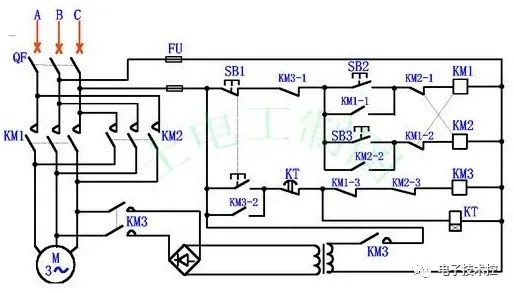
2) 電動機可逆運行的反接制動控制線路
該電路具有反接制動電阻R,并可利用該R進行降壓起動。
控制線路:教材P43~P44 Fig 2-16(請同學自行分析其控制過程)。
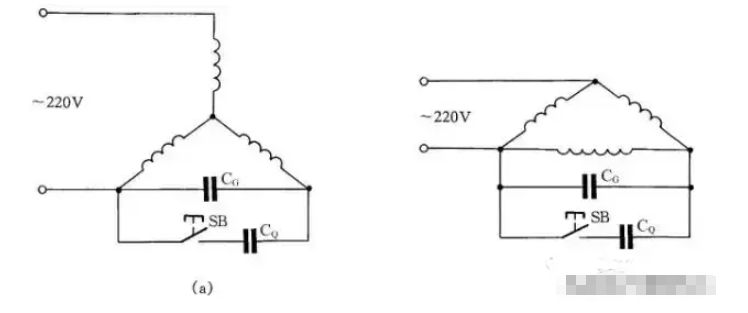
二、能耗制動控制線路——適用電動機容量較大和起、制動頻繁的場合
能耗制動:電動機脫離三相交流電源后,定子繞組加一直流電壓,即定子繞組通以直流電流,利用轉子感應電流與靜止磁場的作用達到制動目的。
能耗制動 時間原則控制——利用時間繼電器控制
速度原則控制——利用速度繼電器控制
(1) 單向能耗制動控制線路
•時間原則控制
控制線路: 教材P45 Fig 2-18
控制過程:
主回路:合上QS→主電路和控制線路接通電源
變壓器需經KM2的主觸頭接入電源(原邊)和定子線圈(副邊)
控制回路:按下SB2→KM1得電→電動機正常運行
按下SB1→ KM1失電→ 電動機脫離三相電源
常閉觸頭復原→KM2得電并自鎖(KT常閉延時斷開)
(通電延時)時間繼電器KT得電,KT瞬動常開觸點閉合
→KM2主觸頭吸合→電動機進入能耗制動狀態→電動機轉速接近于零→KT整定
時間到→ KT延時斷開常閉觸點斷→KM2失電→能耗制動結束
KT瞬動常開觸點自動斷開
注:KT瞬動常開觸點的作用:如果KT線圈斷線或機械卡住故障時,在按下SB1后電動機
能迅速制動,兩相的定子繞組不致長期接入能耗制動的直流電流。
•速度原則控制
控制線路:教材P45 Fig 2-19
控制過程:
主回路:與時間原則控制基本相同,同時在電動機軸伸端安裝速度繼電器KS
控制回路:
按下SB2→KM1得電并自鎖→電動機正常運行→ KM1常閉斷開(互鎖KM2)
KS常開吸合(為制動作好準備)
按下SB1→ KM1失電→電動機脫離三相電源
因慣性,電動機速度仍使KS常開閉合→KM2得電并自鎖→電動機進入能耗制
動狀態。
當電動機的轉子速度→0時,KS常開復原(斷開)→KM2失電→能耗制動結束。
(2)電動機可逆運行能耗制動控制線路
•時間原則控制
控制線路:教材P46 Fig 2-20
(3)無變壓器單管能耗制動控制線路 控制線路













 工商網監
工商網監
評論