 電子發燒友App
電子發燒友App


隨著汽車工業的發展,汽車上的電子控制系統數量呈指數增長。以ECU為核心的車載電子控制系統逐步取代了被動器件和機械系統,同時也完成了大多數測量、驅動和控制的功能。由于新型車載電子控制系統在車輛應用中的增加,導致對電源負載以每年約100W的速度增加。當前所面臨的最大挑戰是在相同的電池電源條件下,找到新的方法來保證汽車電子設備的數量及功能的不斷增加。故在實際應用中需要MCU的功耗持續降低。
汽車電源電子電路圖
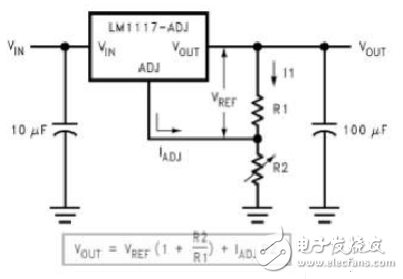
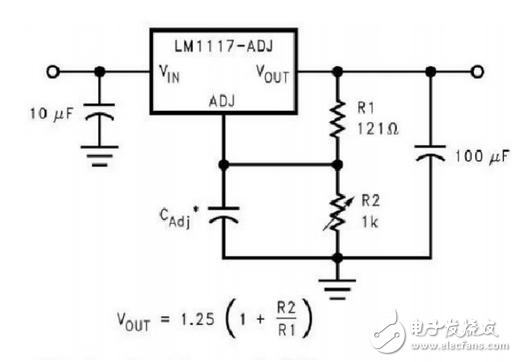
LM2940: 5V,壓差0.5V 選擇了2940這種串聯型線性穩壓電源芯片,它具有紋波小、電路結構簡單的優點,用其為單片機、激光傳感器和編碼器供電;LM1117-ADJ:舵機的6V電壓;LM1117-3.3:無線模塊的3.3V電壓
2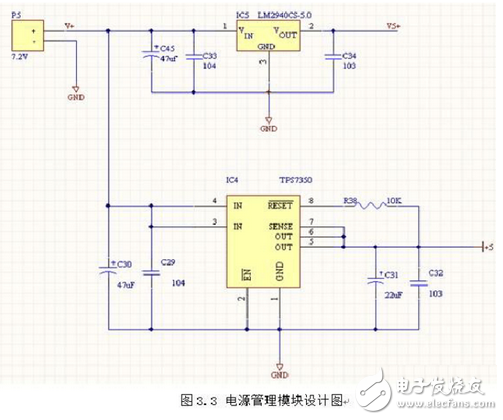
LM2940:5V LM1117-ADJ:舵機的6V電壓
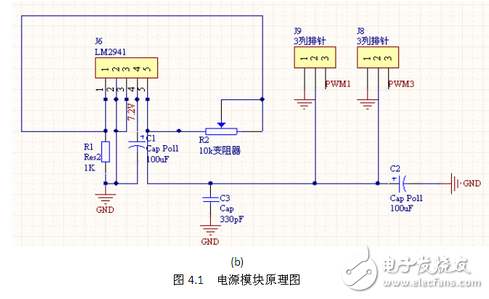
使用智能車競賽統一配發的標準車模用7.2V 2000mAh Ni-cd供電,而單片機、激光傳感器、光電編碼器等均需要5V電源,伺服舵機(包括前輪轉向舵機和后輪剎車舵機)的額定工作電壓為6V,直流電機可直接 用7.2V電池直接供電。 5V穩壓電源用于單片機、激光傳感器模塊、光電編碼器模塊供電。
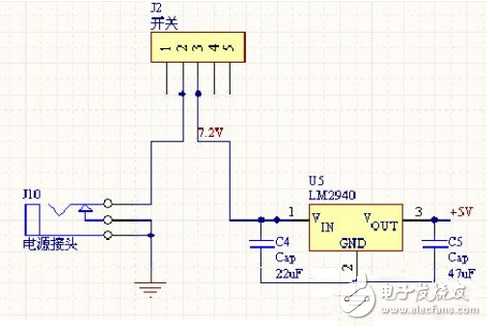
實驗證明,用LM2940搭建成的5V穩壓電路[給這些模塊供 電,能穩定地實現功能,且各個模塊不會互相干擾,整個電路簡單實用。 舵機穩壓電源由LM2941組成的穩壓電路提供,其輸出電壓可調(通過調節圖中的10k電位器)
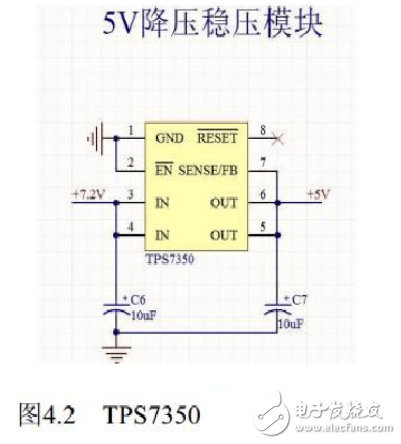
由于整個系統中+5V 電路功耗較小,為了降低電源紋波,考慮使用線性穩壓電路。另外,后輪驅動電機工作時,電池電壓壓降較大,為提高系統工作穩定性,必須使用低壓降電源穩壓芯片,常用的低壓降串聯穩壓芯片主要有2940、1117等等。2940 雖然壓降比1117 更低,但是紋波電壓較大。相比之下,1117 的性能更好一些,具有輸出電壓恒定,壓降較低的優點,但是其線性調整工作方式在工作中會造成較大的熱損失,導致電源利用率不高,工作效率低下。 TPS7350 是微功耗低壓差線性電源芯片,具有完善的保護電路,包括過流,過壓, 電壓反接保護。使用這個芯片只需要極少的外圍元件就能構成高效穩壓電路。與前兩種穩壓器件相比,TPS7350 具有更低的工作壓降和更小的靜態工作電流,可以使電池獲得相對更長的使用時間。由于熱損失小,因此無需專門考慮散熱問題。
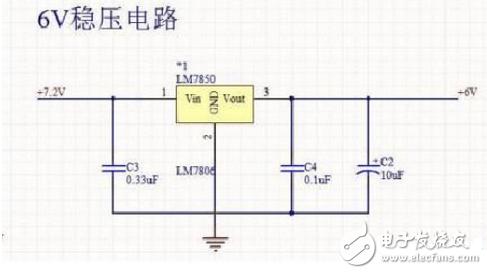
LM7806是6V穩壓芯片,這個芯片的選定是專門為本次車模的舵機而設計的,之前A車模的舵機一般供電都是電源電壓,但是根據B車模舵機容易損毀的特點,必須將供電的電壓值降低,因此選定了LM7806作為6V穩壓芯片。
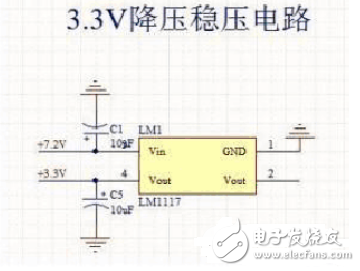
LM1117-3.3V是3.3V穩壓芯片,LM1117有兩個型號,分別是5V穩壓和3.3V 穩壓,3.3V穩壓芯片主要是用于為加速度傳感器MMA7260供電。
電路系統是智能汽車硬件系統的核心,對于本硬件電路系統而言,穩定性是需要優先保證的性能指標,畢竟跑完全程才是取得成績的前提。在此基礎上,還應當綜合考慮智能汽車的動力性、重心及電路板的緊湊性等其他指標。
電機驅動模塊
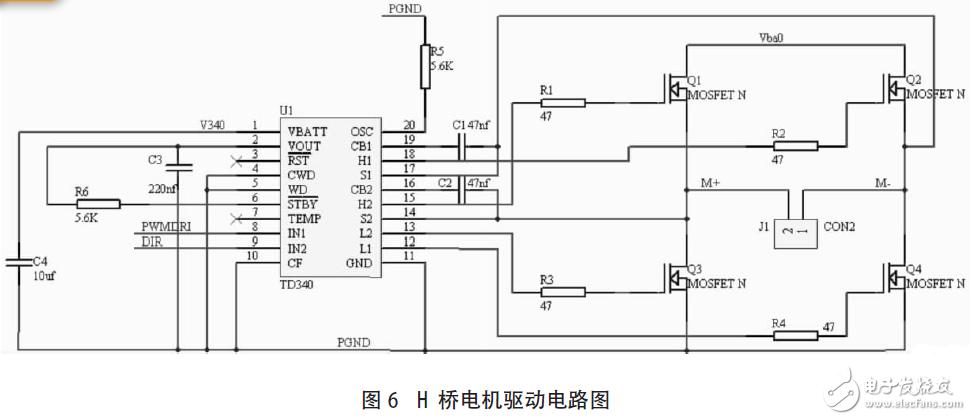
電機驅動模塊為智能汽車的行駛提供動力,它的性能直接影響到后輪電機的控制性能,包括加速、減速與制動等性能。本文采用MOSFET 驅動芯片加全橋驅動方案,只需合理的選擇MOSFET驅動芯片和功率MOSFET 以保證性能即可。電路圖如圖6 所示。
舵機驅動模塊
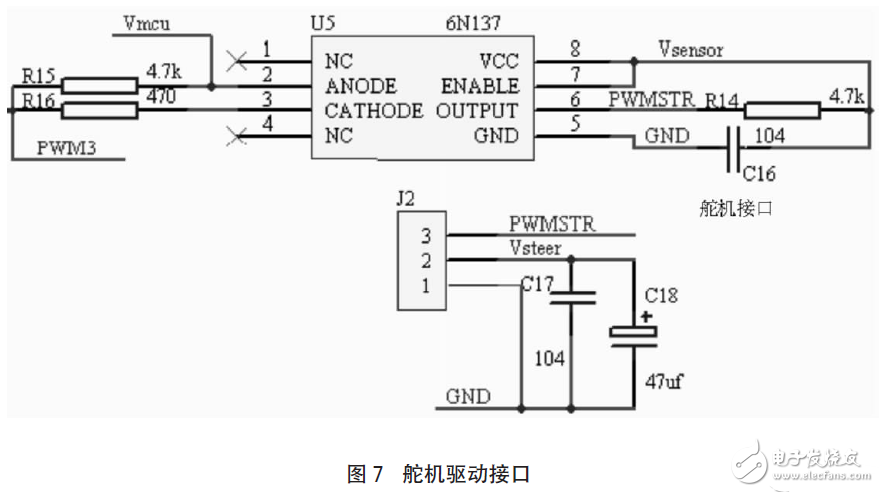
舵機負責智能汽車的轉向,舵機模塊能否穩定工作直接影響到智能汽車在賽道上高速行駛時的穩定性以及轉向時的靈敏度和精確度。舵機工作原理為:舵盤角位由單片機發出的PWM 控制信號的脈寬決定,舵機內部電路通過反饋控制調節舵盤角位。由于自身即為角度閉環控制,而且性能較好,故系統中就不必考慮外加舵機閉環。舵機驅動模塊電路如圖7 所示。舵機驅動模塊同樣屬于功率部分,用6N137光耦進行信號隔離。
智能車輛是一個涉及多領域的復雜的綜合系統,要達到實用的目的,還要進一步深入下研究去,還有許多工作要做。在硬件上還需要解決因攝像頭自身精度的差異或其因外部因素丟失數據導致影響智能車正常運行的問題,增強抗干擾能力;在軟件上,還需要進一步優化算法,控制系統是智能汽車的核心內容,針對智能汽車的功能需求,對智能汽車控制系統關鍵模塊進行了研究,設計的各模塊被應用于“飛思卡爾”智能汽車中,文中各圖對智能汽車的研究具有啟發作用。
解讀NCV70522汽車自適應前照燈系統電路
通常可以通過電機的反電動勢(BEMF)來判斷電機堵轉與否。BEMF 因電機速度、負載及供電電壓的不同而變化。傳統的步進電機驅動芯片無BEMF 輸出,但包含內置堵轉檢測算法。客戶僅可以在寄存器里設定固定的堵轉認定臨界值,這表示在真實道路條件下所有設定值都必須在工作之前“離線”預設,而不能適配真實工作條件。NCV70522微步步進電機驅動器透過SLA 引腳提供BEMF 輸出,這表示它能實時進行停轉檢測計算,并根據不同條件來調節檢測等級。
算法應用
NCV70522是一款微步步進電機驅動器,用于雙極型步進電機。這芯片通過I/O 引腳及SPI 接口連接至外部微控制器。NCV70522輸出電流有多種選擇。它根據“NXT”輸入引腳上的脈沖信號以及方向寄存器[DIRCTRL]或“DIR”輸入引腳的狀態來轉動下一個微步。這器件提供從滿步到32微步的細分、由SPI 寄存器SM[2:0]來選擇的7種步進模式。NCV70522包含SLA 的輸出,可以用于堵轉檢測算法及根據電機的BEMF 來調節轉矩和速度計算。典型應用電路圖如圖所示。
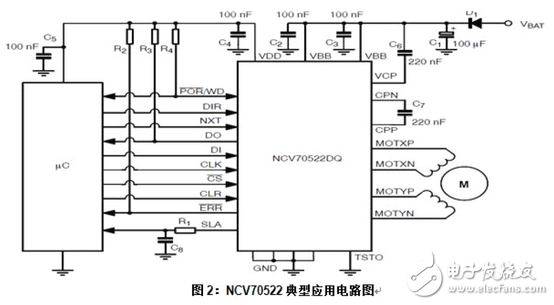
當系統上電時候,微控制器就會初始化,NCV70522復位。這些動作完成時,線圈電流及步進模式將被設定。然后電機驅動器將啟用。NXT 脈沖將被發送實現轉動電機。電機轉速等于NXT 脈沖頻率乘以步進細分模式的值。
電源和復位電路設計
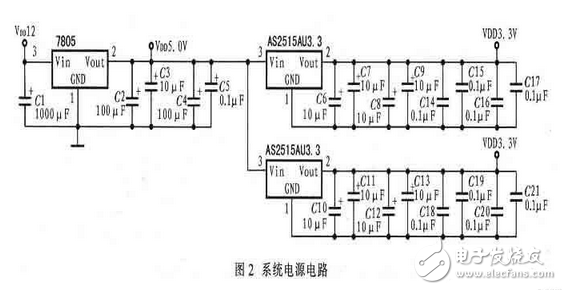
該汽車數字儀表系統采用汽車蓄電池供電,汽車蓄電池的電壓約為12 V,而該系統需采用5 V、2.5 V和3.3 V工作電壓,S3C44BOX內核工作電壓是2.5 V,I/O端口的工作電壓是3.3 V,調理電路以及一些驅動器件需用5 V的工作電壓。因此,系統選用7805穩壓器作為5 V電壓轉換器,選用AS2515AU2.5和AS2515AU3.3分別作為2.5 V和3.3 V電壓轉換器。掉電時能夠及時存儲里程信息,電源地需接一只1 000 μF的電容。掉電時,大電容可以確保S3C44BOX工作一段時間,完成里程信息的存儲。復位電路采用專用的復位電路IPM811實現系統穩定啟動。圖2 為系統電源電路。
車速、水溫、油量以及開關量的處理電路設計
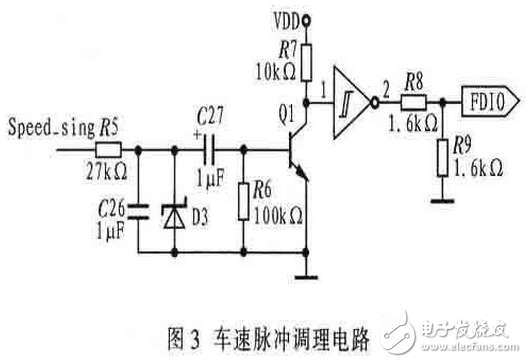
由于汽車大多工作在惡劣環境下,將干擾車速傳感器信號,因此在輸入至中斷端口EINT0前需要對車速脈沖信號進行處理,這里采用RC濾波、三極管放大以及斯密特整形方法調理車速脈沖信號。車速脈沖調理電路如圖3所示。
水溫、油量信號是電阻信號,須轉化為電壓信號,再將其電壓信號輸入至S3C44BOX的AD端口。而其他開關量則經過濾波降壓后輸入至S3C44BOX的I/O端口。
CAN總線通信電路設計
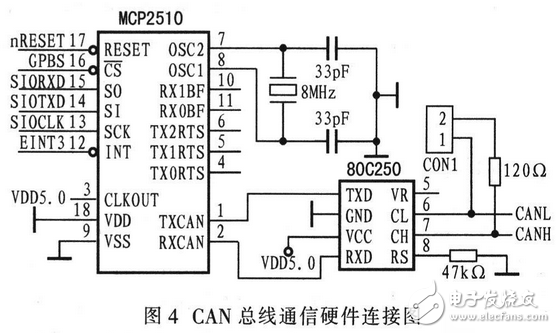
S3C44BOX無SPI接口,但有SIO接口,SIO模塊的發送和接收既可在上升沿鎖存數據位,也可在下降沿鎖存數據位,因此可通過設置 S3C44BOX的SIO模塊所對應的寄存器實現上升沿發送數據,下降沿接收數據,從而與MCP2510的SPI總線時序相配合。CAN總線通信電路如圖 4所示。
步進電機表頭電路等。其中步進電機選用Switec的汽車儀表專用步進電機X15.168,以及專用四通道步進電機驅動器件 X12.017。 S3C44BOX的I/O電平為3.3LVCMOS電平,而X12.017是5VCMOS電平,需采用74LVX4245電平轉換。
采用S3C44BOX與嵌入式實時操作系統μC/OS_II設計了一款高精度高、高靈敏度、工作穩定的嵌入式總線汽車數字儀表。 S3C44BOX資源豐富、執行速度快,能擴展很多種功能,如IC卡、GPS、黑匣子等;加之嵌入式實時操作系統簡化了應用程序,可高效實時地調用系統任務,因此本汽車數字儀表系統能夠很好地解決汽車儀表邁向綜合信息化的問題。
編輯點評:汽車電子被認為是汽車技術發展進程中的一次革命,提高l了汽車的安全性、舒適性、經濟性和娛樂性,目前可分為兩大類:一是汽車電子控制裝置,包括動力總成控制、底盤和車身電子控制、舒適和防盜系統;二是 車載汽車電子裝置,包括汽車信息系統、胎壓監測系統、導航系統等。











 工商網監
工商網監
評論