 電子發(fā)燒友App
電子發(fā)燒友App


電動叉車控制器電路圖(一)
1)電路原理
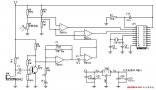
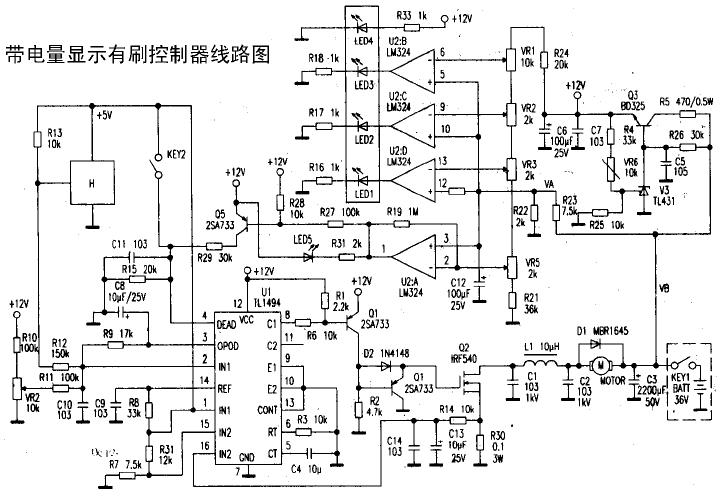
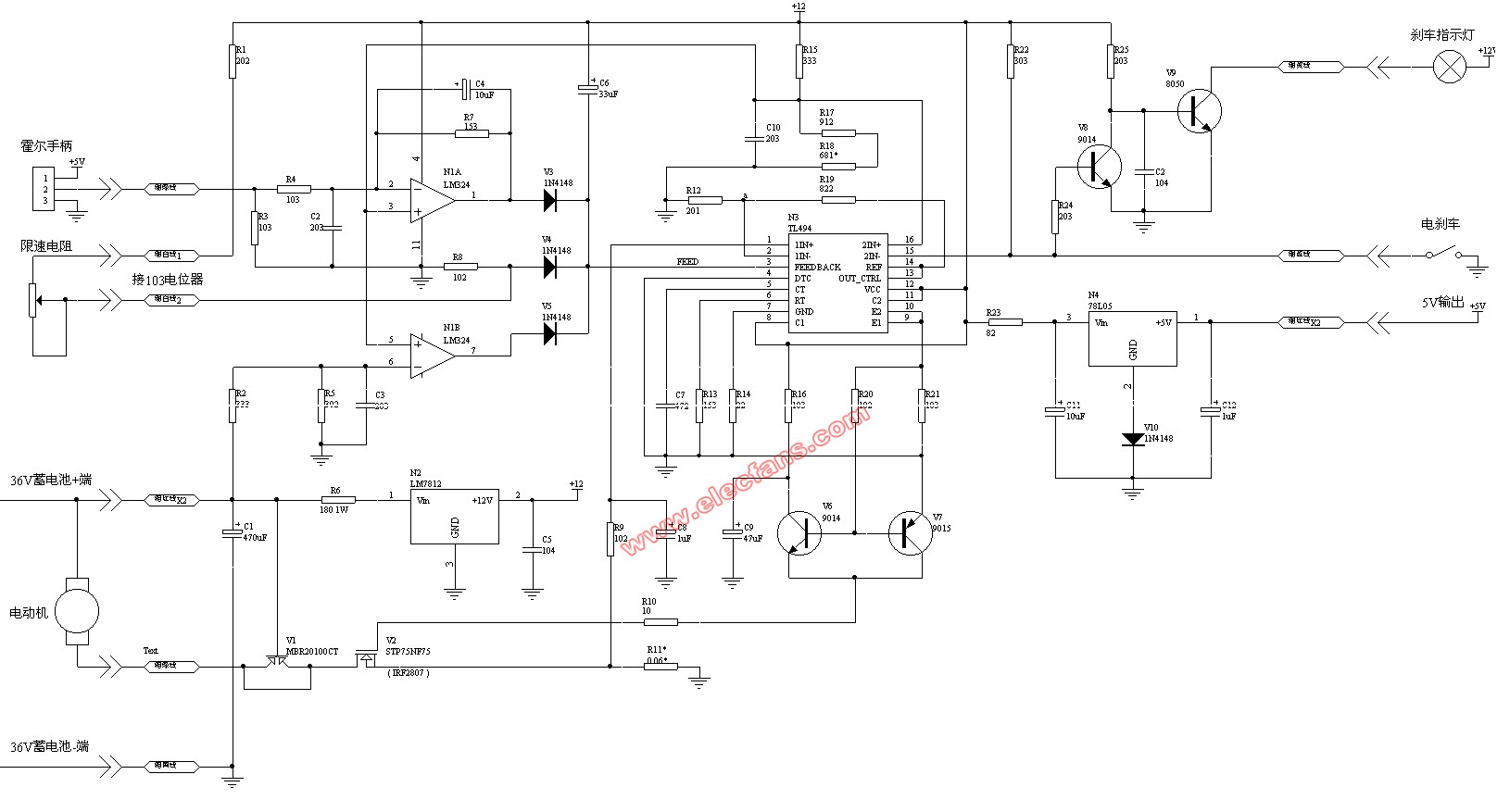
電路原理圖見圖2所示,該控制器由穩(wěn)壓電源電路、PWM產(chǎn)生電路、電機驅(qū)動電路、蓄電池放電指示電路、電機過流及蓄電池過放電保護電路等組成。
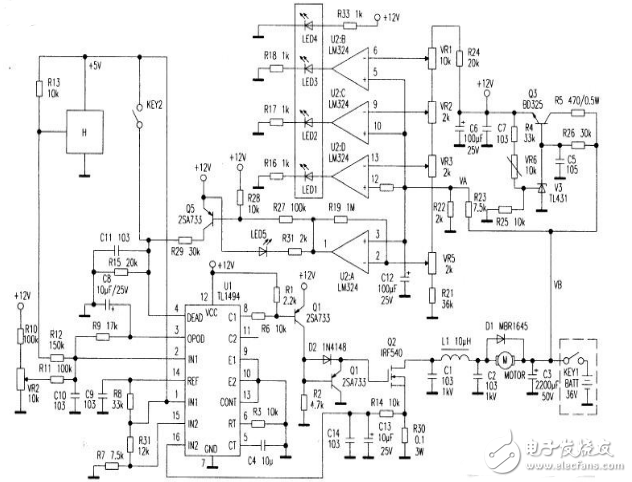
穩(wěn)壓電源由V3(TL431),Q3等元件組成,從36V蓄電池經(jīng)過串聯(lián)穩(wěn)壓后得到12V電壓,給控制電路供電,調(diào)節(jié)VR6可校準12V電源。
PWM電路以脈寬調(diào)制器TL494為核心組成。R3、C4與內(nèi)部電路產(chǎn)生振蕩,頻率大約為12kHz。
H是高變低型霍爾速度控制轉把,由松開到旋緊時,其輸出端可得到4V—1V的電壓。該電壓加到TL494的②腳,與①腳電壓進行比較,在⑧腳得到調(diào)寬脈沖。②腳電壓越低,⑧腳輸出的調(diào)寬脈沖的低電平部分越寬,電機轉速越高,電位器VR2用于零速調(diào)節(jié),調(diào)節(jié)VR2使轉把松開時電機停轉再過一點。
電機驅(qū)動電路由Q1、Q2、Q4等元件組成。電機MOTOR為永磁直流有刷電機。TL494的⑧腳輸出的調(diào)寬脈沖,經(jīng)Q1反相放大驅(qū)動VDMOS管Q2。TL494的⑧腳輸出的調(diào)寬脈沖低電平部分越寬,則Q2導通時間越長,電機轉速越高。D1是電機續(xù)流二極管,防止Q2擊穿。TL494的⑧腳輸出低電平時,Q1、D2導通,Q4截止,Q2導通;TL494的⑧腳輸出高電平時,Q1、D2截止,Q4導通,迅速將Q2柵極電荷泄放,加速Q(mào)2的截止過程,對降低Q2溫度有十分重要的作用。
蓄電池放電指示電路由LM324組成四個比較器,12V由R24、VR1、VR4、VR3、VR5、R21分壓形成四個不同基準電壓分別加到四個比較器的反相端。蓄電池電壓經(jīng)R23和R22分壓加到每個比較器的同相端,該電壓和蓄電池電壓成比例。VA=VB*R22/(R22R23)。當蓄電池電壓不低于38V時,LED1、LED2、LED3均點亮;當電池電壓低于38V時,LED3熄滅;當電池電壓低于35V時,LED2熄滅;當電池電壓低于33V時,LED1熄滅,此時應給電池充電。調(diào)節(jié)VR1、VR4、VR3可分別設定LED3、LED2、LED1熄滅時的電壓。LED4用作電源指示,LED5用作欠壓切斷控制器輸出指示。
蓄電池過放電保護當蓄電池放電到31.5V時.LM324的①腳輸出低電平,三極管Q5導通,約5V電壓加到TL494的死區(qū)控制端④腳。該腳電位≥3.5V,就會迫使TL494內(nèi)部調(diào)寬脈沖輸出管截止,從而使三極管Q1、Q2截止,電機停止運轉,蓄電池放電停止,進入電池保護狀態(tài)。此時LED5點亮,指示出該狀態(tài)。VR5用于設定電池保護點電壓。
電機過流保護R30為電機電流取樣電阻,當過流時,取樣電壓經(jīng)R14加到TL494的⑩腳。當⑩腳電位高于⑩腳電位時,TL494內(nèi)部運放2輸出高電平,迫使TL494內(nèi)部調(diào)寬脈沖輸出管截止,從而使Q1、Q2截止,電機停止運轉,從而保護了電機。
制動保護當剎車制動時,KEY2接通.5V電壓加到TL494的死區(qū)控制端④腳,迫使TL494內(nèi)部調(diào)寬脈沖輸出管截止,從而使Q1、Q2截止,電機停止運轉,實施制動保護。
2)調(diào)試
調(diào)速電路零速調(diào)試:速度轉把完全松開。調(diào)節(jié)VR2使電機停轉并再調(diào)過一點以保證可靠置零速。制動調(diào)試:轉動速度轉把,電機旋轉。此時閉合制動開關KEY2,Q2柵極應立即變?yōu)榈碗娖?V。過流保護調(diào)試:轉動速度轉把,Q2柵極為高電平12V。此時在源極對地之間加上0.8V左右的電壓,柵極應很快變?yōu)榈碗娖健?/p>
蓄電池放電指示電路用可調(diào)電源代替蓄電池。電壓為38V時,調(diào)節(jié)VR1,使LED3剛好熄滅;電壓為35V時,調(diào)節(jié)VR2,使LED2剛好熄滅;電壓為33V時,調(diào)節(jié)VR3,使LED1剛好熄滅;電壓為31V時,調(diào)節(jié)VR5,使LED5剛好點亮,此時TL494的④腳應為高電平5V左右,進入電池欠壓保護狀態(tài)。通過上述設置,僅LED1點亮時,電壓為33V-34V,應及時給蓄電池充電,不過LED1熄滅至LED5點亮這段時間,蓄電池還可維持運行,但LED5點亮時,進入欠壓保護狀態(tài)。此時應注意,過一會兒電池電壓因電機停轉而回升,保護解除,又恢復工作。如此反復保護-工作-保護的結果會損壞電池和控制器,故應避免出現(xiàn)這種狀況。
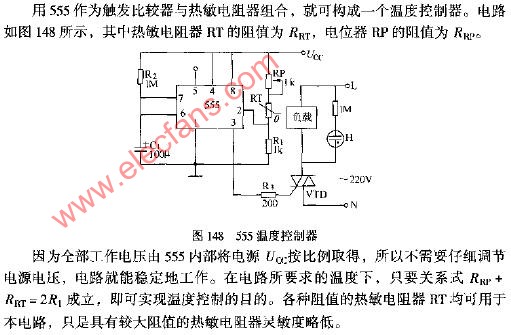
電動叉車控制器電路圖(二)
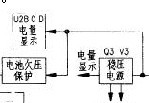
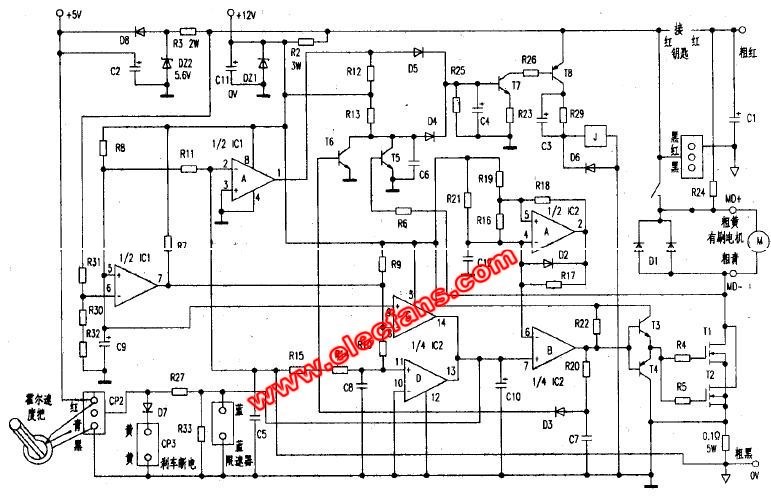
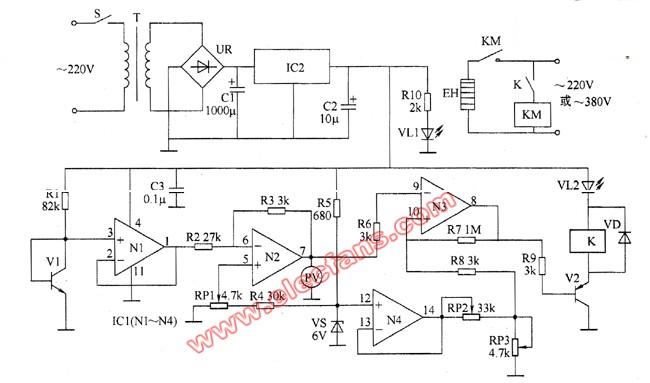
使用LM324、LM393和LM339制作的有刷控制器可靠性是很高的,就是器件數(shù)量多些。該控制器僅用一片LM339制作有刷控制器部分。用另一塊LM339制成電量顯示部分。顯示部分見圖3,電路原理見圖4所示。
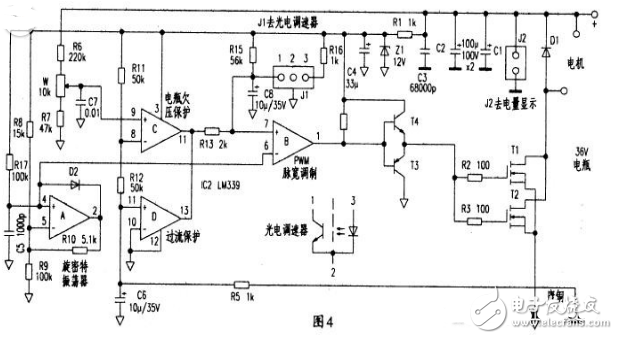
光電速度轉把改為霍爾速度轉把關鍵有兩點:一是加裝5V穩(wěn)壓電源;二是根據(jù)原速度信號輸出點信號變化規(guī)律,選用相應信號變化的霍爾調(diào)速轉把。
該有刷控制器以PWM電路為核心,前面有三角波發(fā)生器、電瓶欠壓檢測、電機過電流檢測;后面有驅(qū)動、功率開關等。每部分都是獨立的。檢查調(diào)試都比較方便。三角波發(fā)生器由IC2A、R17、C5、D2、R9、R10等組成施密特振蕩器,在C5上產(chǎn)生三角波。脈寬調(diào)制器是IC2B,它的輸入之一⑥腳,為來自C5上的三角波,輸入之二⑦腳,是來自速度轉把(J1)①腳的速度信號。從IC2B①腳輸出調(diào)寬脈沖,送互補推挽放大器。互補推挽驅(qū)動由T3、T4組成,脈沖高電平到來,上管NPN管T4導通,12V加到功率管T1、T2的柵極,T1、T2導通;脈沖低電平到來,上管NPN管T4截止。下管PNP管T2導通,將T1、T2柵極的電荷迅速放掉,T1、T2截止。電池欠壓保護由IC2C組成電壓比較器,當電瓶電壓低于31.5V時,它的⒁腳變?yōu)榈碗娢唬喈斢赗13輸入一端接地,將轉把速度信號降到接近零伏。使IC2B①腳呈低電平,T4截止、T3導通;T1、T2截止。過電流保護由IC2D組成電壓比較器,當過電流時。R4右端電位變低。通過R5加到IC2D⑾腳,比較器翻轉⒀腳變?yōu)榈碗娢唬瑯酉喈斢赗13輸入一端接地。將轉把速度信號降到接近零伏,使T1、T2截止。
電動叉車控制器電路圖(三)
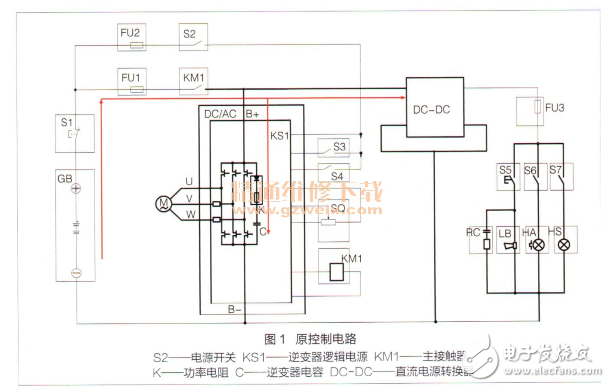
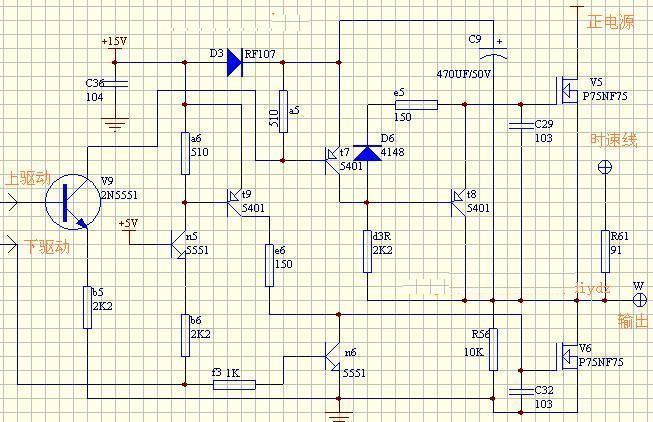
該型電動叉車采用的是控制器廠商推薦的控制電路,如圖1所示。當電源開關S2接通后,逆變器邏輯電源KS1得電。逆變器通過白檢后,主接觸器KM1線圈兩端產(chǎn)生壓差,主接觸器KM1觸點閉合,蓄電池通過功率電阻K向逆變器電容C充電,并且檢測逆變器電容C是否在規(guī)定的時間內(nèi)充足了電。如果在規(guī)定時間完成向逆變器電容C充電,叉車控制系統(tǒng)功率單元接通蓄電池電源,可操縱電動叉車正常工作。為滿足電動叉車燈光、聲光警示及各種功能傳感器的需求,同時保證蓄電池組均衡充放電,控制系統(tǒng)多采用大功率DC-DC直流電源轉換器為用電器提供12V或24V電源。











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論