 電子發(fā)燒友App
電子發(fā)燒友App


|
摘要:針對(duì)點(diǎn)焊的控制特點(diǎn),設(shè)計(jì)了一種基于雙處理器的點(diǎn)焊控制系統(tǒng)。在該系統(tǒng)中,DSP模塊負(fù)責(zé)智能控制程序運(yùn)算,MCU模塊負(fù)責(zé)進(jìn)行人機(jī)對(duì)話,而信號(hào)的輸入輸出則由獨(dú)立的AD&IO模塊負(fù)責(zé)。模擬試驗(yàn)表明,該硬件系統(tǒng)滿足工作要求。 關(guān)鍵詞:點(diǎn)焊控制 雙處理器 硬件設(shè)計(jì) 點(diǎn)焊是將焊件裝配成搭接接頭,并壓緊在兩電極之間,利用電流通過(guò)焊件時(shí)產(chǎn)生的電阻熱熔化母材金屬,冷卻后形成焊點(diǎn)的一種電阻焊方法。其通電加熱時(shí)間一般為幾至幾十周波(一周波為0.02s),而電流有效值一般為幾至幾十KA。 點(diǎn)焊是一個(gè)高度非線性、存在多變量耦合作用和大量隨機(jī)不確定因素的過(guò)程,其形核處于封閉狀態(tài),時(shí)間極短,特征信號(hào)提取困難,控制難度較大。 1 設(shè)計(jì)思想和總體方案 近年來(lái),智能控制技術(shù)正被積極地引入點(diǎn)焊控制研究領(lǐng)域,但由于其算法高度復(fù)雜、計(jì)算密集,因此對(duì)系統(tǒng)的實(shí)時(shí)性要求越來(lái)越高。另一方面,DSP(數(shù)字信號(hào)處理器)技術(shù)的蓬勃發(fā)展,使得其在工業(yè)控制領(lǐng)域的應(yīng)用越來(lái)越廣泛。因此在本設(shè)計(jì)中,使用DSP作核心處理器,充分發(fā)揮其運(yùn)算速度快的優(yōu)勢(shì),并嘗試?yán)枚喾N智能控制算法對(duì)點(diǎn)焊進(jìn)行質(zhì)量控制,以提高焊點(diǎn)的質(zhì)量和可靠性。 在實(shí)際工作中,點(diǎn)焊需要設(shè)置的參數(shù)較多,操作者不得不依賴于各種手冊(cè)、說(shuō)明書(shū)和/或?qū)<揖幹频墓に囄募?lái)進(jìn)行設(shè)備;而且在選定參數(shù)之后,往往還需要通過(guò)一系列的旋鈕、按鈕等開(kāi)關(guān)進(jìn)行設(shè)置,操作復(fù)雜,容易造成混亂。因此在本設(shè)計(jì)中,應(yīng)用MCU(單片機(jī))實(shí)現(xiàn)人機(jī)對(duì)話功能。通過(guò)鍵盤(pán)輸入和液晶顯示,既充分體現(xiàn)了數(shù)字化控制的優(yōu)勢(shì),也有助于實(shí)現(xiàn)點(diǎn)焊專家系統(tǒng)。 由于點(diǎn)焊系統(tǒng)工作在大電流、強(qiáng)磁場(chǎng)的環(huán)境下,因此控制系統(tǒng)的抗干擾問(wèn)題尤為重要,且DSP的工作頻率高,所以將信號(hào)的輸入、輸出部分和DSP、MCU模塊分開(kāi),設(shè)計(jì)獨(dú)立的AD&IO模塊。
系統(tǒng)的總體方案如圖1所示。 本系統(tǒng)選用了DSK-TMS320VC5402芯片作控制核心。DSP是TI公司提供的一套標(biāo)準(zhǔn)的DSP開(kāi)發(fā)平臺(tái),其目的是令使用者能較能地開(kāi)發(fā)和應(yīng)用基于DSP的系統(tǒng),為最終的目標(biāo)系統(tǒng)提供軟、硬件設(shè)計(jì)參考模板。有關(guān)DSK的具體說(shuō)明請(qǐng)參閱有關(guān)的技術(shù)資料。
DSK提供了存儲(chǔ)器接口和外圍設(shè)備接口兩列擴(kuò)展接口。根據(jù)“灰箱法”的設(shè)計(jì)思想,不用完全理解DSK的內(nèi)部原理,只需在對(duì)其整體有一個(gè)基本了解的基礎(chǔ)上,選擇可能要用到的信號(hào)即可。因此專門(mén)設(shè)計(jì)了一塊轉(zhuǎn)接板,作為外圍電路與DSP之間通訊的橋梁。從DSP中引出了26個(gè)信號(hào),如表1所示。
3 AD&IO模塊的設(shè)計(jì) 該模塊包括A/D轉(zhuǎn)換、輸入、輸出三部分電路,它們分別負(fù)責(zé)模擬信號(hào)的輸入和轉(zhuǎn)換以及開(kāi)關(guān)信號(hào)的輸入和控制信號(hào)的輸出。 3.1 A/D轉(zhuǎn)換電路
A/D轉(zhuǎn)換器的選取主要考慮所采集的模擬信號(hào)的數(shù)量、精度及與DSP的速度匹配等,綜合考慮后,選用TI公司生產(chǎn)的12位4通道高速AD-TLV2544。 本設(shè)計(jì)中A/D轉(zhuǎn)換電路分為三部分:第一部分由5.1V的穩(wěn)壓二極管又濾波電容103組成,構(gòu)成模擬輸入部分;第二部分由TLV2544組成,完成A/D轉(zhuǎn)換;第三部分由八相緩沖器74LS244組成,完成DSP與TLV2544之間的通訊,如圖2所示。 A/D轉(zhuǎn)換電路的工作是由DSP的多通道緩沖串口MCBSP來(lái)控制的。MCBSP通過(guò)其數(shù)據(jù)輸出口DX0發(fā)送控制字到TLV2544的SDI口,該控制字為16位,前4位是指令位。如果TLV2544接收到的前四位是0XA,那么接下來(lái)的12位就會(huì)被當(dāng)作控制字譯碼;相反,如果前4位接收到的是0XE,那么ADC將繼續(xù)輸出FIFO的內(nèi)容到SDO中。其中,SDI和SDO分別是TLV2544的控制信號(hào)輸入口和已轉(zhuǎn)換好的數(shù)字信號(hào)輸出口。當(dāng)TLV2544按DSP發(fā)出的控制字轉(zhuǎn)換到一定時(shí)候(如FIFO堆棧滿)時(shí),則發(fā)出INT信號(hào)通知DSP接收。DSP接收到INT信號(hào)后,經(jīng)X_DR0口讀入TLV2544已轉(zhuǎn)換好的串行數(shù)據(jù)。 3.2 輸入和輸出電路 為了抵抗電氣干擾和高壓電擊,在本設(shè)計(jì)中,輸入和輸出電路均采用光隔PC817傳遞邏輯信號(hào),實(shí)現(xiàn)電氣隔離。另外還使用反相器74HC14對(duì)傳輸信號(hào)進(jìn)行整形,利用施密特特性消除毛刺干擾,提高信號(hào)傳輸?shù)目垢蓴_能力。輸入和輸出電路與DSP的接口如圖3所示。 在輸入電路中使用了緩沖器74LS244,以增強(qiáng)線驅(qū)動(dòng)能力,如圖3所示。假設(shè)第二路輸入為低電平,則光隔不導(dǎo)通,A2也為低電平。DSP要讀取它的時(shí)候,先給輸入一個(gè)低電平,然后用02H(即00000010)去線與,判斷Y2的值是否為1,如果不為1則不讀入,反之讀入。其它輸入也是這樣來(lái)處理。 因?yàn)檩敵龅拈_(kāi)關(guān)量需要保持開(kāi)或關(guān)的狀態(tài),所以在輸出電路中使用了鎖存器74LS373,進(jìn)行緩沖和鎖存,如圖3所示。當(dāng)輸出由低電平變?yōu)楦唠娖綍r(shí)候,DSP將數(shù)據(jù)由X_D[0~7]送到鎖存器的輸入端,然后再給OCLOCK一個(gè)低電平脈沖,數(shù)據(jù)即被鎖存在鎖存器的輸出端。假如Q0=1,則經(jīng)反相器后變?yōu)榈碗娖剑飧魧?dǎo)通;反之,光隔不導(dǎo)通,從而實(shí)現(xiàn)了開(kāi)關(guān)量的數(shù)據(jù)輸出。 4 MCU模塊的設(shè)計(jì) 4.1 MCU擴(kuò)展系統(tǒng)
在本設(shè)計(jì)中,MCU選用89C51,并擴(kuò)展了片外ROM27512(64KB)和片外RAM6264(8KB),如圖4所示。MCU用作液晶顯示的數(shù)據(jù)線;P2口用作高位地址線,其高3位P25、P26、P27同時(shí)還作譯碼器74LS138的輸入,該譯碼器的輸出為片外RAM的尋址訪問(wèn)信號(hào)。片外鎖存器和RAM 6264是統(tǒng)一編址的,即每一片鎖存器都有自己的地址。 在本設(shè)計(jì)中,鍵盤(pán)包括“0~9”、“.”、“確認(rèn)”、“上翻”、“下翻”、“取消”、“暫停”等共16個(gè)鍵位,故采用4×4的矩陣式方案。矩陣式鍵盤(pán)由行線和列線組成,按鍵設(shè)置在行、列線的交點(diǎn)上。行、列線分別連接到按鍵開(kāi)關(guān)的兩端。行線通過(guò)上拉電阻接到+5V上。無(wú)按鍵動(dòng)作時(shí),行線處于高電平;而當(dāng)有鍵按下時(shí),行線電平狀態(tài)將由與此行線相連的列線電平?jīng)Q定。列線電平如果為低,則行線電平為低;列堅(jiān)電平為高,則行線電平為高。從而可以識(shí)別出按鍵是否按下。 鍵盤(pán)電路主要由單片機(jī)的P0口、八相反相緩沖器74LS240、鎖存器74LS273以及一些上拉電阻組成。P0口用作數(shù)據(jù)線,八相反相緩沖器74LS240緩沖行線的信號(hào),鎖存器74LS273鎖存從P0口送給列線的信號(hào)。對(duì)八相反相緩沖器74LS240所緩沖的行線的值的讀取是通過(guò)譯碼器74LS138輸出的譯碼信號(hào)G5來(lái)控制的,其讀地址為BFFFH;而對(duì)鎖存器74LS273的控制則是通過(guò)譯碼器輸出的G6來(lái)控制的,對(duì)列的寫(xiě)地址為DFFFH。 在本設(shè)計(jì)中選用的液晶顯示器是信利公司的MG12232-5。該液晶顯示器帶背光及溫度補(bǔ)償功能,左右有主、從兩個(gè)控制器SED1520,上下分4頁(yè)。漢字顯示采用12×12點(diǎn)陣,數(shù)字、符號(hào)顯示采用12×6點(diǎn)陣。每個(gè)漢字占24字節(jié),數(shù)字、符號(hào)占12字節(jié),均燒入程序存儲(chǔ)器。 液晶顯示電路的工作原理為:由MCU通過(guò)P1口向液晶顯示器的數(shù)據(jù)線DB口輸出顯示數(shù)據(jù)和控制指令,通過(guò)P3口向液晶顯示器輸出對(duì)E1、E2、A0、RST端口的控制字。液晶顯示器的E1、E2、A0、RST口信號(hào)分別為主控制器讀寫(xiě)使能信號(hào)、從控制器使能信號(hào)、顯示或指令選擇信號(hào)以及復(fù)位信號(hào)。
使用液晶顯示器首先需要進(jìn)行初始化,其工作在規(guī)定的方式中。液晶初始化包括:復(fù)位、休閑狀態(tài)設(shè)置、設(shè)置占空比、排序設(shè)置、設(shè)置顯示起始行、開(kāi)顯示、自動(dòng)顯示的方向設(shè)置等。這些命令在操作中都是作為指令寫(xiě)入控制器的。然后再將要顯示的漢字或字符數(shù)據(jù)送給液晶顯示器,液晶顯示器即可按控制字的要求進(jìn)行顯示。 該通訊電路由三片緩沖器74LS244(U6001、U6002及U6008、MCU的P0口以及DSP的X_D[0~7]口組成,如圖5、圖6所示。各緩沖器的控制信號(hào)由譯碼器138的輸出G1、G2、G3、G4組成。其中,U6001負(fù)責(zé)將MCU的數(shù)據(jù)送到DSP,U6002負(fù)責(zé)把DSP的數(shù)據(jù)送到MCU,而U6008則負(fù)責(zé)發(fā)送MCU與DSP之間的通訊請(qǐng)求和確認(rèn)信號(hào)。 DSP向MCU發(fā)送數(shù)據(jù)的過(guò)程為:DSP將數(shù)據(jù)通過(guò)X_D[0~7]口輸出至緩沖器U6002,同時(shí)由X_XF發(fā)送通訊請(qǐng)求信號(hào)至MPU的P00口,MCU檢測(cè)到該信號(hào)后,讀取緩沖器U6002的數(shù)據(jù),然后通過(guò)P02口發(fā)給DSP一個(gè)確認(rèn)信號(hào)。 MCU向DSP發(fā)送數(shù)據(jù)的過(guò)程與上相似。 模擬試驗(yàn)表明,本文介紹的硬件系統(tǒng)可以滿足工作要求,為下一步的研究提供了良好的平臺(tái)。作者試運(yùn)行了電流有效值的神經(jīng)網(wǎng)絡(luò)求解和可控硅模糊控制等自編程序,均獲得了良好的預(yù)期效果。
|
||||||||||||||||||||||||||||||||||||||||||||||
基于雙處理器的點(diǎn)焊控制系統(tǒng)的硬件設(shè)計(jì)

- mcu(342695)
- 硬件設(shè)計(jì)(44302)


相關(guān)推薦
太陽(yáng)能LED照明控制系統(tǒng)處理器的設(shè)計(jì)
本文的研究對(duì)象是太陽(yáng)能LED照明控制系統(tǒng)控制器中的處理器。系統(tǒng)通過(guò)控制器實(shí)現(xiàn)系統(tǒng)工作狀態(tài)的管理、蓄電池剩余
2010-11-25 09:51:36 607
607
607
雙處理器設(shè)計(jì)與雙核設(shè)計(jì)之間的差異是什么?
“Neitherthe MicroBlaze和PowerPC處理器在硬件中提供高速緩存一致性。當(dāng)兩個(gè)處理器訪問(wèn)相同的物理內(nèi)存時(shí),通過(guò)一個(gè)處理器更新內(nèi)存是另一方的緩存子系統(tǒng)沒(méi)有直接看到。如果需要,軟件就可以確保一致性
2019-03-04 13:41:13
雙核處理器與IC
,物以稀為貴。所以,銷售方式好也不失為一種手段。其次是性能出色的雙核處理器,采用的是高通的MSM8260處理器,配Adreno220圖形處理器。最后在產(chǎn)品ID設(shè)計(jì)和材料使用上,小米也獨(dú)具一格。造就了今天的風(fēng)靡。我們也要跟著潮流的進(jìn)步而改變并接受,只有努力適應(yīng),才會(huì)有更多的創(chuàng)新和突變。
2014-04-04 17:29:29
雙核ARM Cortex-A9 處理器
架構(gòu)雙核ARM Cortex-A9 處理器:一個(gè)應(yīng)用級(jí)的處理器,能運(yùn)行完整的像Linux 這樣的操作系統(tǒng)傳統(tǒng)的現(xiàn)場(chǎng)可編程門(mén)陣列(Field Programmable Gate Array,F(xiàn)PGA
2021-07-23 09:23:34
雙比環(huán)流量比值控制系統(tǒng)比值控制系統(tǒng)設(shè)計(jì)資料
雙比環(huán)流量比值控制系統(tǒng)雙比環(huán)流量比值控制系統(tǒng).zip 2015-6-12 14:15 上傳 點(diǎn)擊文件名下載附件 919.86 KB, 下載次數(shù): 3
2018-07-19 04:06:11
處理器及微處理器系統(tǒng)
,都是由簡(jiǎn)單的微處理器系統(tǒng)發(fā)展而來(lái),微處理器是應(yīng)用最廣泛的芯片。首先了解微處理器及微處理器系統(tǒng),對(duì)接下來(lái)了解各種芯片及控制系統(tǒng)的很有幫助。 微處理器系統(tǒng)微處理器系統(tǒng),囊括了各種類型的計(jì)算機(jī),微控制器
2018-02-07 11:41:21
I2C總線通信技術(shù)在球形機(jī)器人雙DSP控制系統(tǒng)中的應(yīng)用是什么
文中提出的TMS320DM6437+TMS320F28015的軟硬件設(shè)計(jì)方案在新型球形機(jī)器人控制系統(tǒng)中得到初步應(yīng)用,驗(yàn)證了理論設(shè)計(jì)的可行性和可靠性,實(shí)驗(yàn)結(jié)果表明接口數(shù)據(jù)讀寫(xiě)高效可靠。本設(shè)計(jì)對(duì)以后其他雙核控制系統(tǒng)接口的設(shè)計(jì)與研究工作具有很好的參考價(jià)值。
2021-05-27 06:46:44
MCS-51單片機(jī)溫度控制系統(tǒng)的設(shè)計(jì)思路
,抗干擾性強(qiáng)。接受信息后處理器可快速地作出反應(yīng),導(dǎo)通驅(qū)動(dòng)電路,實(shí)現(xiàn)溫度調(diào)節(jié)。本文從硬件和軟件兩方面介紹了MCS-51單片機(jī)溫度控制系統(tǒng)的設(shè)計(jì)思路,對(duì)硬件原理圖和程序框圖作了簡(jiǎn)捷的描述。
2020-04-26 08:09:20
MicroBlaze微處理器在實(shí)時(shí)汽車系統(tǒng)中有哪些應(yīng)用?
普遍認(rèn)為開(kāi)發(fā)多處理器系統(tǒng)軟件的難度要大于單處理器系統(tǒng)。但實(shí)際情況并非總是如此。我們這個(gè)在 TRW 汽車公司下屬的咨詢部 TRW Conekt 工作的設(shè)計(jì)團(tuán)隊(duì)最近接管了一個(gè)項(xiàng)目,展示了如何根據(jù)手中的問(wèn)題發(fā)揮硬件的功能,并通過(guò)使用許多個(gè)處理器開(kāi)發(fā)出高效系統(tǒng)。
2019-10-23 08:00:03
PSoC怎么設(shè)計(jì)一個(gè)倒車?yán)走_(dá)控制系統(tǒng)?
傳統(tǒng)設(shè)計(jì)中,控制器只用來(lái)實(shí)現(xiàn)處理數(shù)據(jù)、系統(tǒng)間的通訊和控制功能。如果用 PSoC傳感器應(yīng)用平臺(tái)怎么設(shè)計(jì)一個(gè)倒車?yán)走_(dá)控制系統(tǒng)?
2021-05-18 06:50:19
SHARC處理器的評(píng)估系統(tǒng)
用于SHARC處理器的ADZS-21489-EZLITE,ADSP-2148x EZ-KIT Lite評(píng)估系統(tǒng)。 SHARC處理器基于32位超級(jí)哈佛架構(gòu),包括一個(gè)獨(dú)特的內(nèi)存架構(gòu),由兩個(gè)大型片上雙端口
2020-03-16 10:19:26
VxWorks操作系統(tǒng)基于ARM處理器的中斷怎么處理?
本文通過(guò)基于S3C44B0X處理器VxWorks嵌入式操作系統(tǒng)的BSP移植,詳細(xì)分析了VxWorks操作系統(tǒng)基于ARM處理器的中斷處理方法。
2021-04-27 06:28:03
三種調(diào)整處理器系統(tǒng)功耗的方法分享
Teledyne e2v為系統(tǒng)設(shè)計(jì)師提供的定制方案處理器功耗的背景知識(shí)三種調(diào)整處理器系統(tǒng)功耗的方法
2021-01-01 06:04:09
專用控制芯片的步進(jìn)電機(jī)運(yùn)動(dòng)控制系統(tǒng)的設(shè)計(jì)理念是什么
專用控制芯片的步進(jìn)電機(jī)運(yùn)動(dòng)控制系統(tǒng)的設(shè)計(jì)理念概括步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)化為角位移或線位移的電磁機(jī)械裝置。步進(jìn)電機(jī)的穩(wěn)定性和可靠性直接影響到工業(yè)控制領(lǐng)域的精度,特別是在點(diǎn)膠點(diǎn)焊等高精度運(yùn)動(dòng)控制系統(tǒng)中,對(duì)于步進(jìn)電機(jī)的精度和穩(wěn)定性要求更高。所以說(shuō),對(duì)于步進(jìn)電機(jī)控制
2021-09-07 08:21:11
中頻逆變點(diǎn)焊機(jī)在控制系統(tǒng)部分表現(xiàn)出來(lái)的優(yōu)勢(shì)
中頻逆變點(diǎn)焊機(jī)之所以能夠?qū)崿F(xiàn)優(yōu)化的應(yīng)用,在進(jìn)行焊接加工的時(shí)候,呈現(xiàn)出很高的焊接效率和非常好的焊接效果,除了因?yàn)槠溆蟹浅?qiáng)大的焊接功能,還因?yàn)槠湓?b class="flag-6" style="color: red">控制系統(tǒng)部分具備著下面這些優(yōu)勢(shì),下面斯特科技小編來(lái)具體
2023-03-02 10:46:50
交流勵(lì)磁雙饋風(fēng)力發(fā)電機(jī)雙PWM控制系統(tǒng)的仿真研究
交流勵(lì)磁雙饋風(fēng)力發(fā)電機(jī)雙PWM控制系統(tǒng)的仿真研究
2009-09-11 01:07:08
什么是運(yùn)動(dòng)控制系統(tǒng)?運(yùn)動(dòng)控制系統(tǒng)的任務(wù)是什么?
什么是運(yùn)動(dòng)控制系統(tǒng)?運(yùn)動(dòng)控制系統(tǒng)的任務(wù)是什么?
2021-10-29 07:40:48
以S3C44B0X為處理器進(jìn)行智能家居系統(tǒng)的硬件設(shè)計(jì)介紹
日常生活的各個(gè)領(lǐng)域,本文針對(duì)智能家居嵌入式系統(tǒng)的軟硬件設(shè)計(jì)需求,以S3C44B0X為處理器進(jìn)行智能家居系統(tǒng)的硬件設(shè)計(jì),以實(shí)現(xiàn)μC/OS-Ⅱ在S3C44B0X上的移植。
2019-07-25 07:39:26
信號(hào)隔離器在水處理控制系統(tǒng)的應(yīng)用
安科瑞 時(shí)麗花摘要:水處理控制系統(tǒng)中,其控制、監(jiān)測(cè)模塊的非電量模擬量傳感器采用信號(hào)隔離器的接線方式合理地解決了相關(guān)模擬量傳感器供電電源安全和相對(duì)獨(dú)立的問(wèn)題,保證了監(jiān)測(cè)模塊的電源、模擬量采集模塊
2022-03-29 09:17:20
分享一款不錯(cuò)的基于CPLD的臭氧電源控制系統(tǒng)的軟硬件設(shè)計(jì)
求大神分享一款不錯(cuò)的基于CPLD的臭氧電源控制系統(tǒng)的軟硬件設(shè)計(jì)
2021-04-29 06:45:15
創(chuàng)龍 TI AM5728 基于GigE相機(jī)與EtherCAT的機(jī)器視覺(jué)控制系統(tǒng)
能力,可滿足工業(yè)協(xié)議支持、大數(shù)據(jù)計(jì)算、實(shí)時(shí)控制等應(yīng)用需求。 廣州創(chuàng)龍基于TI AM5728浮點(diǎn)雙DSPC66x+雙ARMCortex-A15處理器設(shè)計(jì)的開(kāi)發(fā)板,其中雙核ARM主頻高達(dá)1.5GHz,雙核
2018-07-25 09:37:14
圖解最新標(biāo)桿性混合信號(hào)控制處理器
日益增長(zhǎng)的需求,OEM制造商需要更高的處理器性能,更精確、更快的模數(shù)轉(zhuǎn)換器,以及創(chuàng)新特性以便降低系統(tǒng)成本,縮短上市時(shí)間,增添新的功能。ADSP-CM40x具有行業(yè)領(lǐng)先的混合信號(hào)性能——搭載一枚240MHz
2018-11-01 09:28:28
基于雙處理器的點(diǎn)焊控制硬件系統(tǒng)設(shè)計(jì)方案
引入點(diǎn)焊控制研究領(lǐng)域,但由于其算法高度復(fù)雜、計(jì)算密集,因此對(duì)系統(tǒng)的實(shí)時(shí)性要求越來(lái)越高。另一方面,DSP(數(shù)字信號(hào)處理器)技術(shù)的蓬勃發(fā)展,使得其在工業(yè)控制領(lǐng)域的應(yīng)用越來(lái)越廣泛。因此在本設(shè)計(jì)中,使用DSP作
2018-08-29 10:10:29
基于雙處理器的點(diǎn)焊控制系統(tǒng)的硬件設(shè)計(jì)
引入點(diǎn)焊控制研究領(lǐng)域,但由于其算法高度復(fù)雜、計(jì)算密集,因此對(duì)系統(tǒng)的實(shí)時(shí)性要求越來(lái)越高。另一方面,DSP(數(shù)字信號(hào)處理器)技術(shù)的蓬勃發(fā)展,使得其在工業(yè)控制領(lǐng)域的應(yīng)用越來(lái)越廣泛。因此在本設(shè)計(jì)中,使用DSP作
2018-08-28 11:58:24
基于處理器硬件系統(tǒng)的電機(jī)控制設(shè)計(jì)實(shí)驗(yàn)室
BeInMotion,BeMicro SDK電機(jī)控制設(shè)計(jì)實(shí)驗(yàn)室。您將構(gòu)建基于處理器的硬件系統(tǒng)并在其上運(yùn)行軟件。您將看到使用Qsys和Nios II EDS構(gòu)建電機(jī)控制系統(tǒng)以快速簡(jiǎn)便地配置和集成預(yù)先
2020-05-19 09:30:50
基于ARM處理器的吸塵機(jī)器人硬件設(shè)計(jì)
包括傳感器模塊,電機(jī)驅(qū)動(dòng)模塊,紅外遙控接收模塊、LED 指示燈和液晶顯示模塊。采用ARM Cortex-M3處理器作為機(jī)器人控制系統(tǒng)的核心,主要是低成本、小管腳數(shù)和低功耗,并且具有極高的運(yùn)算能力和極強(qiáng)
2018-11-06 16:01:27
基于ARM與GPRS的家庭智能控制系統(tǒng)
隨著生活節(jié)奏的不斷加快,人們希望即使在工作或外出時(shí)也能及時(shí)了解家中的情況并控制家中的各種設(shè)備。各種無(wú)線通信技術(shù)的不斷發(fā)展,使家庭智能系統(tǒng)的遠(yuǎn)程控制成為一種現(xiàn)實(shí)。本文結(jié)合ARM9 處理器功能強(qiáng)大
2021-02-02 07:00:39
基于ARM的校園LED公告板控制系統(tǒng)該如何去設(shè)計(jì)?
校園LED公告板控制系統(tǒng)的硬件該如何去設(shè)計(jì)?校園LED公告板控制系統(tǒng)的軟件該如何去設(shè)計(jì)?
2021-06-01 06:27:50
基于FPGA的硬件控制系統(tǒng)該如何去設(shè)計(jì)?
請(qǐng)教各位,基于FPGA的硬件控制系統(tǒng)該如何去設(shè)計(jì)?
2021-04-28 07:01:25
基于TC1782的永磁同步電機(jī)控制系統(tǒng)
的設(shè)計(jì),最后驗(yàn)證測(cè)試整個(gè)控制系統(tǒng)。2.2.1 主芯片選型PMSM電機(jī)的控制要求主控制器不僅有強(qiáng)大的適合電機(jī)控制的專用外設(shè),而且有很強(qiáng)的實(shí)時(shí)性能。TC1782是一款哈弗架構(gòu)且有非對(duì)稱雙核(主核Tricore和外設(shè)
2018-12-04 09:50:05
基于虛擬儀器的城市景觀照明分布式控制系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
基于虛擬儀器的城市景觀照明分布式控制系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)針對(duì)城市級(jí)景觀照明系統(tǒng)分布廣,數(shù)量多的特點(diǎn),設(shè)計(jì)一種基于虛擬儀器的可組分布式城市景觀照明控制系統(tǒng)。采用C8051F040 處理器構(gòu)建多通道照明控制
2009-12-01 10:19:03
如何去設(shè)計(jì)一種基于STM32控制器的模糊PID溫度控制系統(tǒng)呢
模糊PID溫度控制系統(tǒng)的硬件電路包括哪幾部分呢?如何去設(shè)計(jì)一種基于STM32控制器的模糊PID溫度控制系統(tǒng)呢?
2021-12-23 07:08:20
如何在STM32F10x處理器平臺(tái)中實(shí)現(xiàn)IAP功能?
Cortex-M3是首款基于ARMv7-M體系結(jié)構(gòu)的32位標(biāo)準(zhǔn)處理器,RISC結(jié)構(gòu),包含高效靈活的Thumb-2指令集,擁有杰出的低功耗特性,為微控制器系統(tǒng)、汽車車身控制系統(tǒng)、工業(yè)控制系統(tǒng)和無(wú)線網(wǎng)絡(luò)
2020-11-24 06:42:43
如何選擇汽車電子系統(tǒng)中的處理器?
針對(duì)汽車數(shù)字信號(hào)處理應(yīng)用的各種處理器類型,有什么優(yōu)缺點(diǎn)?如何選擇汽車電子系統(tǒng)中的處理器?
2021-05-14 06:59:41
實(shí)時(shí)控制系統(tǒng)需要不斷優(yōu)化性能
的電力線通信(PLC)。 為此,TI C2000?MCU集成了多達(dá)四個(gè)集成的片上硬件加速器,可在許多實(shí)時(shí)應(yīng)用中顯著提高設(shè)備性能。四個(gè)加速器包括浮點(diǎn)單元(FPU)、實(shí)時(shí)協(xié)處理器控制律加速器(CLA
2019-07-23 04:45:03
小白求助,求基于嵌入式處理器S3C2440為核心的多任務(wù)機(jī)器人控制系統(tǒng)
小白求助,求基于嵌入式處理器S3C2440為核心的多任務(wù)機(jī)器人控制系統(tǒng)
2021-10-21 08:28:01
嵌入式控制系統(tǒng)的ARM處理器概述
嵌入式控制系統(tǒng)的ARM處理器一、嵌入式硬件系統(tǒng)概述1、嵌入系統(tǒng)的硬件可分為三部分:核心處理器、控制電路、外部設(shè)備2、嵌入式處理器的種類(1)嵌入式微處理器MPU(2)嵌入式微控制器MCU(3)嵌入式
2021-10-27 08:49:08
嵌入式系統(tǒng)硬件層嵌入式處理器
嵌入式系統(tǒng)硬件層嵌入式處理器 (硬件層核心)嵌入式控制器MCU (單片機(jī)),舉例:8051,STC80C/S51,P51XA,MCS-251,MCS-96/196/296,MC68HC05/11
2021-10-27 06:58:46
嵌入式微處理器如何選擇
、A/D轉(zhuǎn)換器、多媒體音頻控制器、以太網(wǎng)控制器等各類功能模塊,有些芯片甚至是雙核的。所以,選擇適合自己產(chǎn)品的一種芯片是有一定難度的,要求研發(fā)人員熟悉整個(gè)嵌入式微處理器的產(chǎn)品情況,并對(duì)各類芯片的性能有足夠
2020-05-20 11:11:35
工業(yè)控制系統(tǒng)中的常用控制器有哪些?
工業(yè)控制系統(tǒng)中的常用控制器有哪些?其常用控制器分別有哪些特點(diǎn)以及應(yīng)用?
2021-07-05 06:48:21
常規(guī)的滑板車控制系統(tǒng)硬件設(shè)計(jì)方案
安全運(yùn)行,對(duì)電機(jī)控制系統(tǒng)的性能要求很高,對(duì)電機(jī)的效率也有較大的要求。同時(shí)作為一種實(shí)用型的交通工具,要求電機(jī)控制系統(tǒng)能承受震動(dòng)、耐受惡劣環(huán)境、可靠性高。常規(guī)的滑板車控制系統(tǒng)硬件設(shè)計(jì)方案如下圖所示,主要包括
2021-11-10 07:24:31
微型計(jì)算機(jī)控制系統(tǒng)的硬件是由哪些部分組成的
組成。不同的控制器硬件組成不同,但一般都可以根據(jù)需求進(jìn)行擴(kuò)展。1、CPU微型處理器是整個(gè)控制系統(tǒng)的指揮部,通過(guò)結(jié)構(gòu)及軟件可向系統(tǒng)的各個(gè)部分發(fā)出各種號(hào)令,對(duì)被測(cè)參數(shù)進(jìn)行巡回檢測(cè)、數(shù)據(jù)處理、控制計(jì)算、報(bào)警處理
2021-09-10 06:18:42
怎么實(shí)現(xiàn)基于PLC和變頻器的雙饋電動(dòng)機(jī)節(jié)能控制系統(tǒng)設(shè)計(jì)?
變頻器和PLC的雙饋電動(dòng)機(jī)節(jié)能技術(shù)優(yōu)勢(shì)是什么?怎么實(shí)現(xiàn)基于PLC和變頻器的雙饋電動(dòng)機(jī)節(jié)能控制系統(tǒng)設(shè)計(jì)?
2021-05-31 06:37:08
怎么設(shè)計(jì)基于DSP與FPGA的雙饋式風(fēng)電變流器控制系統(tǒng)?
變流器系統(tǒng)。控制系統(tǒng)平臺(tái)采用主頻300 MHz的DSP芯片與FPGA共同控制,大大提高了系統(tǒng)的穩(wěn)定性以及實(shí)時(shí)性。控制系統(tǒng)采用矢量控制技術(shù)和功率閉環(huán)的變速控制策略。最后在自主研發(fā)的2 MW雙饋式風(fēng)電變流器的樣機(jī)上進(jìn)行了實(shí)驗(yàn)和現(xiàn)場(chǎng)試運(yùn)行,驗(yàn)證了控制系統(tǒng)的可靠性。
2019-09-04 07:51:43
怎樣利用電機(jī)旋轉(zhuǎn)角度和轉(zhuǎn)速雙閉環(huán)去搭建一個(gè)雙閉環(huán)控制系統(tǒng)?
怎樣利用電機(jī)旋轉(zhuǎn)角度和轉(zhuǎn)速雙閉環(huán)去搭建一個(gè)雙閉環(huán)控制系統(tǒng)?雙閉環(huán)控制系統(tǒng)的結(jié)構(gòu)是由哪些部分組成的?
2021-07-22 09:25:23
怎樣去設(shè)計(jì)一種雙后輪驅(qū)動(dòng)電動(dòng)汽車運(yùn)動(dòng)控制系統(tǒng)?
模型電動(dòng)汽車系統(tǒng)是怎樣構(gòu)成的?怎樣去設(shè)計(jì)一種雙后輪驅(qū)動(dòng)電動(dòng)汽車運(yùn)動(dòng)控制系統(tǒng)?
2021-05-13 06:19:27
整合雙ARM內(nèi)核和DDR3內(nèi)存接口的嵌入式處理器
意法半導(dǎo)體(紐約證券交易所代碼:STM)發(fā)布業(yè)內(nèi)首款整合雙ARM Cortex-A9 內(nèi)核和DDR3(第三代雙速率)內(nèi)存接口的嵌入式處理器。新產(chǎn)品SPEAr1310采用意法半導(dǎo)體的低功耗 55nm
2018-12-12 10:20:29
智能車燈控制系統(tǒng),硬件電路怎么做?
本帖最后由 elecfans跑堂 于 2015-9-15 10:13 編輯
智能車燈控制系統(tǒng),硬件電路怎么做?小弟萬(wàn)分感謝了
2015-09-15 09:36:48
求一款雙MicroBlaze軟核處理器的SOPC系統(tǒng)設(shè)計(jì)
隨著時(shí)代的發(fā)展,單核片上可編程系統(tǒng)SOPC(Systern On a Programmable Chip)解決復(fù)雜問(wèn)題的能力與處理速度已很難滿足用戶的需求,面向多處理器SOPC系統(tǒng)的設(shè)計(jì)成為片上系統(tǒng)
2021-03-16 07:44:35
求一種在多處理器系統(tǒng)中的Nios II軟核處理器的啟動(dòng)方案
本文設(shè)計(jì)了一種在多處理器系統(tǒng)中的Nios II軟核處理器的啟動(dòng)方案,這個(gè)方案在外部處理器向Nios II的程序存儲(chǔ)器和數(shù)據(jù)存儲(chǔ)器加載數(shù)據(jù)時(shí),可以控制Nios II處理器的啟動(dòng)。
2021-04-27 06:52:42
用于ADSP-CM408混合信號(hào)控制處理器的評(píng)估系統(tǒng)
ADZS-CM408F-EZLITE,ADSP-CM40x EZ-Kit Lite評(píng)估系統(tǒng),用于ADSP-CM408混合信號(hào)控制處理器。 ADSP-CM40x處理器系列基于ARM Cortex-M4
2020-03-17 09:59:52
用于電機(jī)控制系統(tǒng)與設(shè)計(jì)(5)
具有高達(dá)800 MMAC的性能,集成5 MB片 內(nèi)存儲(chǔ)器、FFT/FIR/IIR加速器以及眾多外部存儲(chǔ)器接口與外設(shè),使這些處理器適用于運(yùn)動(dòng)控制器、高端電機(jī)驅(qū)動(dòng)和伺服器系統(tǒng)。 未完待續(xù)!相關(guān)文章:【A
2018-10-25 10:17:17
繼電接觸器控制系統(tǒng)和PLC控制系統(tǒng)的主要區(qū)別是什么?
繼電接觸器控制系統(tǒng)和PLC控制系統(tǒng)的主要區(qū)別是什么?可編程控制系統(tǒng)和繼電器控制系統(tǒng)有哪些異同點(diǎn)?PLC的工作方式是以循環(huán)掃描方式進(jìn)行的。試問(wèn)PLC的一個(gè)掃描周期分哪幾個(gè)階段? 主控指令的編程元件有哪些?主控指令使用時(shí)應(yīng)注意哪些方面?
2021-07-02 06:45:41
計(jì)算機(jī)控制系統(tǒng)的硬件由哪幾部分組成
計(jì)算機(jī)控制系統(tǒng)的硬件由哪幾部分組成?各部分的作用是什么?與傳統(tǒng)的模擬控制系統(tǒng)相比,計(jì)算機(jī)控制系統(tǒng)有哪些特點(diǎn)?
2021-10-11 08:02:31
評(píng)估雙核Blackfin處理器的ADZS-BF609-EZLITE ADSP-BF609 EZ-KIT Lite評(píng)估系統(tǒng)
ADZS-BF609-EZLITE,ADSP-BF609 EZ-KIT Lite評(píng)估系統(tǒng)為用戶提供低成本硬件解決方案,用于評(píng)估雙核Blackfin處理器,每個(gè)處理器500 MHz / 1000
2020-03-13 06:48:56
請(qǐng)問(wèn)怎么去設(shè)計(jì)噴霧降塵控制系統(tǒng)?
為什么要設(shè)計(jì)噴霧降塵控制系統(tǒng)?噴霧降塵控制系統(tǒng)硬件如何去設(shè)計(jì)?怎樣設(shè)計(jì)噴霧降塵控制系統(tǒng)的軟件電路?請(qǐng)問(wèn)怎么去設(shè)計(jì)噴霧降塵控制系統(tǒng)?
2021-04-13 07:02:06
請(qǐng)問(wèn)怎樣去設(shè)計(jì)一種雙串口電梯遠(yuǎn)程控制系統(tǒng)?
怎樣去設(shè)計(jì)雙串口電梯遠(yuǎn)程控制系統(tǒng)的硬件電路?怎樣去設(shè)計(jì)雙串口電梯遠(yuǎn)程控制系統(tǒng)的軟件程序?
2021-05-27 07:03:01
調(diào)節(jié)多核處理器硬件適應(yīng)軟件設(shè)計(jì)方法
調(diào)節(jié)多核處理器硬件適應(yīng)軟件設(shè)計(jì)方法 典型的嵌入式系統(tǒng)設(shè)計(jì)人員在硬件平臺(tái)上進(jìn)行編程,他們最關(guān)注的一點(diǎn)就是硬件平臺(tái)的穩(wěn)定性。如果硬件沒(méi)有設(shè)置好,會(huì)帶來(lái)重新編寫(xiě)代碼的麻煩。但是一個(gè)完全
2008-09-25 17:17:55
采用MBD怎么構(gòu)建電機(jī)控制系統(tǒng)?
最近幾十年來(lái),借助高級(jí)處理器功能來(lái)簡(jiǎn)化設(shè)計(jì)一直都是廣泛討論的話題。如今,設(shè)計(jì)靈活性進(jìn)一步提高,使工程師能夠采用標(biāo)準(zhǔn)的MATLAB? 和 Simulink?模型設(shè)計(jì)來(lái)優(yōu)化電機(jī)控制系統(tǒng),并縮短整體設(shè)計(jì)時(shí)間。此外,設(shè)計(jì)工程師還能夠重復(fù)使用仿真模型,確保系統(tǒng)在終端市場(chǎng)應(yīng)用中具有正確的功能和所需性能。
2019-09-26 07:42:42
多軸運(yùn)動(dòng)控制系統(tǒng)
CRT工業(yè)運(yùn)動(dòng)控制系統(tǒng),其硬件結(jié)構(gòu)基于高性能 DSP 為控制核心、FPGA 協(xié)處理,插補(bǔ)算法、脈沖信號(hào)產(chǎn)生及直線曲線加減速控制、I/O 信號(hào)的檢測(cè)處理。DMC600M系列3~6軸運(yùn)動(dòng)控制系統(tǒng)
2022-02-26 16:26:24
6軸五金拋光示教控制系統(tǒng)
CRT工業(yè)運(yùn)動(dòng)控制系統(tǒng),其硬件結(jié)構(gòu)基于高性能 DSP 為控制核心、FPGA 協(xié)處理,插補(bǔ)算法、脈沖信號(hào)產(chǎn)生及直線曲線加減速控制、I/O 信號(hào)的檢測(cè)處理。DMC600M系列3~6軸運(yùn)動(dòng)控制系統(tǒng),運(yùn)用
2022-05-11 10:39:05
基于MCU的光伏控制系統(tǒng)
本文構(gòu)建一種基于微處理器的中、小功率光伏控制系統(tǒng)。從硬件、軟件方面完善系統(tǒng)對(duì)蓄電池充放電及其負(fù)載的管理和保護(hù)。系統(tǒng)采用了LCD、鍵盤(pán)和異步串行通信,加強(qiáng)了系統(tǒng)的實(shí)
2009-08-07 14:38:31 22
22
22基于XScale 處理器的天線控制系統(tǒng)的設(shè)計(jì)
介紹一種基于Intel XScale PXA255 處理器的天線控制系統(tǒng)及其設(shè)計(jì)與實(shí)現(xiàn),介紹了該系統(tǒng)的嵌入式硬件實(shí)驗(yàn)平臺(tái),詳細(xì)論述了整個(gè)嵌入式系統(tǒng)的機(jī)制、移植和軟件設(shè)計(jì)方法。隨著信
2009-08-14 09:30:5216
16真有效值直流轉(zhuǎn)換芯片AD536A在直流點(diǎn)焊微機(jī)控制系統(tǒng)中的應(yīng)
AD536A 是美國(guó)AD 公司推出的一種能夠?qū)⒅绷?交流信號(hào)快速轉(zhuǎn)換成真有效值輸出的集成芯片。直流點(diǎn)焊微機(jī)控制系統(tǒng)是直流點(diǎn)焊微機(jī)控制箱的核心控制系統(tǒng)。本文簡(jiǎn)要介紹了AD536A
2009-10-16 09:08:2051
51基于雙NIOSII軟核處理器的脫丁烷塔控制系統(tǒng)
介紹了基于ALTERA 公司FPGA 的雙NIOSII 軟核處理器在化工設(shè)備——脫丁烷塔控制系統(tǒng)中的應(yīng)用。由于雙CPU 處在同一塊FPGA 芯片中,并且分擔(dān)了不同的控制環(huán)節(jié),使得整個(gè)控制系統(tǒng)與同
2009-11-27 15:40:176
6PLC控制系統(tǒng)的硬件組成
PLC控制系統(tǒng)的硬件組成
PLC控制系統(tǒng)硬件包括機(jī)箱和彩色液晶顯示器。機(jī)箱內(nèi)裝有PLC 主機(jī)、數(shù)字量模塊、模擬量模塊和
2009-01-18 15:16:053176
3176基于Rabbit2000微處理器的網(wǎng)絡(luò)消防報(bào)警控制系統(tǒng)
【摘 要】 介紹了以Rabbit2000微處理器為核心的新型網(wǎng)絡(luò)消防報(bào)警控制系統(tǒng)的基本工作原理以及系統(tǒng)的軟硬件設(shè)計(jì)。該控制系統(tǒng)采用模塊化和智能式分布技術(shù)設(shè)計(jì),具有編程快捷,
2009-05-15 22:28:43917
917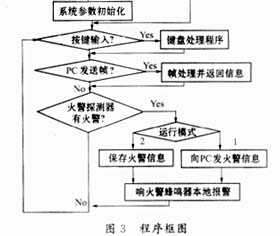
OMRON PLC在水處理控制系統(tǒng)中的應(yīng)用
OMRON PLC在水處理控制系統(tǒng)中的應(yīng)用
本文以山東沾化煒燁電廠鍋爐補(bǔ)給水處理控制系統(tǒng)為例,論述了OMRON PLC在水處理領(lǐng)域的應(yīng)用。對(duì)系統(tǒng)
2009-06-19 13:15:58953
953
基于Blackfin BF50x處理器的電機(jī)驅(qū)動(dòng)控制系統(tǒng)
介紹了ADI公司Blackfin BF50x處理器的主要特點(diǎn), 給出了基于Blackfin BF50x處理器的電機(jī)驅(qū)動(dòng)控制系統(tǒng)的實(shí)現(xiàn)方案,
2011-01-21 11:29:04726
726
基于ATOM處理器的工業(yè)控制系統(tǒng)實(shí)現(xiàn)
給出一款基于Intel ATOM處理器的工業(yè)控制系統(tǒng)的設(shè)計(jì)方案,并對(duì)Menlow平臺(tái)架構(gòu),系統(tǒng)電源,時(shí)鐘,音頻,視頻,BIOS等實(shí)現(xiàn)要點(diǎn)作了深入闡述.經(jīng)過(guò)測(cè)試應(yīng)用,該系統(tǒng)各項(xiàng)性能指標(biāo)均達(dá)到設(shè)計(jì)要求.
2011-02-14 15:47:4039
39基于DSP的飛行仿真轉(zhuǎn)臺(tái)控制系統(tǒng)
摘要:文章介紹了一種新型的基于高速數(shù)字信號(hào)處理器(DSP),以永磁同步電動(dòng)機(jī)(PMSM)為驅(qū)動(dòng)部件的飛行仿真轉(zhuǎn)臺(tái)控制系統(tǒng)的原理及構(gòu)成,并介紹了控制系統(tǒng)的硬件和軟件結(jié)構(gòu)。給出了一些實(shí)驗(yàn)結(jié)果。 關(guān)鍵詞:數(shù)字信號(hào)處理器(DSP) 伺服系統(tǒng) 永磁同步電動(dòng)機(jī)
2011-02-27 15:38:0789
89采用DSP的電液的伺服控制系統(tǒng)
摘要:闡述電液伺服控制系統(tǒng)的特點(diǎn),提出一種高性能的電液伺服控制系統(tǒng)的設(shè)計(jì)方案。建立液壓系統(tǒng)的數(shù)學(xué)模型,并進(jìn)行控制系統(tǒng)軟、硬件的設(shè)計(jì)。硬件部分采用TMS320LF2407 DSP芯片作為核心處理器,軟件部分則采用具有先進(jìn)智能性的模糊PID控制算法。利用MATLAB軟
2011-02-28 17:18:3680
80PLC在水處理控制系統(tǒng)中的應(yīng)用
以山東沾化煒燁電廠鍋爐補(bǔ)給水處理控制系統(tǒng)為例,論述了OMRON PLC在水處理領(lǐng)域的應(yīng)用。對(duì)系統(tǒng)的硬件、軟件結(jié)構(gòu)及工作原理進(jìn)行了說(shuō)明,并且重點(diǎn)介紹了OMRON PLC的子程序調(diào)用結(jié)構(gòu)和對(duì)
2011-06-17 17:04:0059
59新型電源車單片機(jī)控制系統(tǒng)硬件設(shè)計(jì)
控制系統(tǒng)對(duì) 電源車 供電品質(zhì)起關(guān)鍵作用, 本文設(shè)計(jì)了基于AVR單片機(jī)的新型電源車控制系統(tǒng)硬件電路, 并分析了控制系統(tǒng)各硬件組成部分, 實(shí)踐證明, 該控制器具有良好的性價(jià)比和很高的可
2011-08-16 14:35:0344
44信捷點(diǎn)焊機(jī)控制系統(tǒng)
點(diǎn)焊機(jī)由可轉(zhuǎn)動(dòng)的圓形工作臺(tái)、帶動(dòng)電機(jī)左右移動(dòng)的橫梁以及控制電機(jī)上下運(yùn)動(dòng)的主軸構(gòu)成。這三部分的運(yùn)動(dòng)控制都是由信捷DS2系列伺服系統(tǒng)完成精確的定位控制。
2017-10-11 17:33:2217
17集散控制系統(tǒng)體系結(jié)構(gòu)及硬件組成
集散控制系統(tǒng)(Distributed Control System)是以微處理器為基礎(chǔ)的集中分散型控制系統(tǒng)。集散控制系統(tǒng)的集中是進(jìn)行集中操作管理,集散控制系統(tǒng)的分散控制系統(tǒng)的體系結(jié)構(gòu)是分布式
2017-10-14 12:12:4414
14基于PLC的鍋爐水處理控制系統(tǒng)與基于zigbee技術(shù)的井蓋防盜控制系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
介紹了基于PLC的鍋爐水處理控制系統(tǒng)的設(shè)計(jì)方案、系統(tǒng)組成、硬件配置和軟件結(jié)構(gòu),闡述了控制系統(tǒng)的硬件和軟件設(shè)計(jì)過(guò)程。實(shí)際應(yīng)用表明,該控制器可以獲得滿意的控制效果。 軟化水設(shè)備的工作原理是基于陽(yáng)離子
2017-10-16 16:51:583
3基于微處理器的嵌入式直流伺服電機(jī)控制系統(tǒng)
本文探討一種采用中低檔微處理器的嵌入式直流伺服電機(jī)控制系統(tǒng).該系統(tǒng)用戶軟件設(shè)計(jì)采用嵌入式實(shí)時(shí)操作系統(tǒng)Salvo.系統(tǒng)功能擴(kuò)展和裁剪方便,可移植到各個(gè)應(yīng)用領(lǐng)域。 系統(tǒng)硬件如圖1所示。伺服電機(jī)控制系統(tǒng)
2017-12-06 09:09:1211
11以嵌入式處理器S3C2440為核心的多任務(wù)機(jī)器人控制系統(tǒng)設(shè)計(jì)詳解
,不能滿足機(jī)器人多任務(wù)的要求。系統(tǒng)中增加協(xié)處理器的系統(tǒng)結(jié)構(gòu)也得到了廣泛應(yīng)用,雖然可以管理多種傳感器,但這種結(jié)構(gòu)卻增加了硬件的冗余度和復(fù)雜度,見(jiàn)參考文獻(xiàn)。為此,提出了以嵌入式處理器S3C2440為核心的多任務(wù)機(jī)器人控制系統(tǒng)。
2018-09-10 17:58:001580
1580
基于S3C44B0x處理器和傳感器實(shí)現(xiàn)煤機(jī)控制系統(tǒng)的設(shè)計(jì)
給煤機(jī)控制系統(tǒng)軟件選用嵌入式實(shí)時(shí)多任務(wù)操作系統(tǒng)mC/OS-II。它是一個(gè)源代碼公開(kāi)、可移植、可固化、可剪裁、占先式的實(shí)時(shí)多任務(wù)操作系統(tǒng)。其絕大部分源代碼是用ANSI C寫(xiě)的,移植方便,并且運(yùn)行穩(wěn)定可靠。目前,它已經(jīng)在幾十種從8位到64位的微處理器,微控制器上實(shí)現(xiàn)了成功的移植。
2020-04-25 10:38:00452
452
DCS分散式控制系統(tǒng)的基本結(jié)構(gòu)
相對(duì)于中央式控制系統(tǒng),分散式的系統(tǒng)可以緩解單一處理器造成的失效。在分散式控制系統(tǒng)中,如果有某一處理器失效,它影響的只是生產(chǎn)流程中的一部分,而在中央式控制系統(tǒng)中,如果某一處理器失效,整個(gè)系統(tǒng)都會(huì)受到影響。
2021-03-15 11:07:172885
2885嵌入式控制系統(tǒng)的ARM處理器
嵌入式控制系統(tǒng)的ARM處理器一、嵌入式硬件系統(tǒng)概述1、嵌入系統(tǒng)的硬件可分為三部分:核心處理器、控制電路、外部設(shè)備2、嵌入式處理器的種類(1)嵌入式微處理器MPU(2)嵌入式微控制器MCU(3)嵌入式
2021-10-20 13:21:063
3




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論