目前,國內外已有多家公司開發出針對個體潛水電機的智能電了保護裝置,雖然可以達到保護電機的目的,但無法實現集中管理。因此,對潛水電機群的實時監控與統一管理的要求日益迫切。本文設計了基于CAN現場總線
2020-11-02 10:28:01 2845
2845 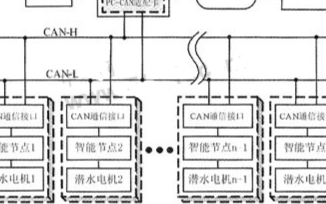
在工業自動化領域,可能會遇到不同的產線相距較遠但又需要實現兩個網絡的數據交互應用的情況,虹科PCAN-Ethernet-Gateway可以滿足該需求。虹科PCAN-Ethernet-Gateway允許通過 IP 網絡連接不同的 CAN 總線。
2022-09-26 17:16:14905 CAN總線協議的打包與解包是如何進行的?CAN總線協議是如何自動生成代碼的?
2021-11-22 07:57:35
本人新接觸CAN總線,麻煩給位大蝦給知道下該如何學起,專業背景:電氣工程及其自動化。
2014-09-12 14:12:09
因小水電站的廠用電源來自電網和發電機組的機端。隨著工業生產的發展,一些大功率的設備在啟停過程中對電網形成很大的干擾,產生電壓相對較高的尖峰脈沖電壓,疊加在交流正弦電壓上,有時達1000 V以上
2011-12-15 15:43:26
系統在小水電站的應用日益廣泛.通過計算機監控系統的應用,實現自動監視,控制,調節,保護, 從而保證水電站設備充分利用水能安全穩定運行,并按電力系統要求優化運行,提高人們用電的質量,發展前景十分廣闊.【關鍵...
2021-09-10 06:12:00
在制造業,根據制造業和工藝的不同,加工自動化裝配線有多種類型,如自動加工裝配線、自動裝置裝配線、自動噴涂裝配線、自動焊接裝配線、自動電鍍裝配線等。其中典型的有兩種:一種是機械零件加工工業中運用的自動
2022-06-28 14:24:29
ZN-05G型 自動化實訓裝置一、概述ZN-05G型 自動化實訓裝置需按照人社部頒發的“維修電工技術等級標準”和“職業技能鑒定規范”的內容要求,結合技能大賽電氣安裝與調試項目的競賽規程,根據維修電工
2021-07-01 09:50:27
自動化流程,人們可以不斷從機器獲得反饋,監督并在必要時候采取適當措施。傳感器傳感器是指任何類型的裝置,可以檢測一部機器或者電路的物理狀態。大多數自動化裝置都安裝了某種傳感器,例如在家庭或者企業報警系統中
2018-02-05 11:11:46
一級學科控制科學與工程二級學科081101控制理論與控制工程081102檢測技術與自動化裝置081104模式識別與智能系統主要設置如下研究方向:(1)智能機器人控制技術研究不同信息獲取模式下的智能
2021-09-13 07:52:16
布線與維護成本、穩定可靠、實時、抗干擾能力強、傳輸距離遠等特點,是一種成功的總線。不僅在汽車行業得到推廣與應用,在航天、電力、石化、冶金、紡織、造紙等領域也得到廣泛應用。在自動化儀表、工業生產現場、數控機床等系統中也越來越多的使用了CAN總...
2021-08-19 07:41:05
ZN-1ZX現場總線自動化綜合控制實訓系統的特點是什么?ZN-1ZX現場總線自動化綜合控制實訓系統是由哪些部分組成的?
2021-09-27 06:26:55
ZN-CR1高級過程控制傳熱自動化實訓裝置是什么?
2021-09-26 07:38:10
請問一下,怎么實現將altium繪制的電路板,導入到proe中,利用現有的proe三維元器件模型庫,在proe中實現自動化裝配
2016-06-28 00:44:46
申請理由:實現手機藍牙模塊與販賣機互動,多功能娛樂與販賣一體機!項目描述:研發制作藍牙連接無線選購與娛樂自動販賣機!讓客戶與機器互動更多,更有趣!
2016-01-26 14:04:04
的功能。如果將微機保護和監控裝置進行接口,那么能夠進行故障錄波、測距和信號接地報警工作。 2.智能化 智能化,指的是低變壓配電裝置運行管理的智能化。綜合自動化系統不僅要具備變電所的常規功能,而且還要
2018-03-12 14:11:05
基于CAN總線的網絡化PLC技術研究與實現-南京航空航天大學 可編程控制器是高可靠性,使用靈活,功能豐富的工業自動化控制裝置,在工業中有著廣泛的應用和發展前景,頁網絡化的可編程
2009-10-31 10:02:11
基于MODBUS總線多功能電力儀表遠程通訊的軟件開發技術附件基于MODBUS總線多功能電力儀表遠程通訊的軟件開發技術.doc80.5 KB
2018-10-16 17:51:55
本人新接觸CAN總線,麻煩給位大蝦給知道下該如何學起,專業背景:電氣工程及其自動化
2020-06-19 05:55:27
多總線自動化測試系統是由哪些部分組成的?怎樣把遺傳算法應用到SVM中去?如何對多總線自動化測試系統進行測試驗證?
2021-06-08 07:19:35
RS485/232/422,CAN總線雷擊浪涌保護M-BUS,RS485/232/422,CAN總線,電路過壓,過流保護方案 應用于三表遠傳抄送,工業計算機,電力系統自動化,安防設備,產品的總線硬件過壓保護,具有電容性小(
2020-12-11 11:46:37
工業電氣自動化及電工電子技能考核實訓平臺有哪些技術指標?工業電氣自動化及電工電子技能考核實訓平臺裝置的基本配置及功能是什么?
2021-09-26 08:27:04
ZRLY-GPB[建筑給排水電氣及自動化實訓系統](http://www.zhongrenkj.com/product/1512.html)一、概述建筑給排水系統實訓裝置整體采用鋁型材框架和網孔板
2021-07-01 12:02:39
實現綜合自動化,還可以有效地降低工作人員的勞動強度,提高設備運行的可靠性。關鍵詞:油田能源站;微機保護裝置;自動化;可靠運行0引言微機保護是用來對電動機、變壓器母線、輸配電線路等電氣元件進行監視和保護的一種自動化裝置。當這些元件發生故障或出現不正常運行情況時,能發出使故障元件退出運行的操作...
2021-09-13 06:49:40
本文詳細介紹了一種基于CAN總線的多功能汽車行駛記錄儀,對CPU的選擇、CAN接口模塊、存儲器、通信模塊、內部軟件以及管理中心的建設做了深入的分析和說明。
2021-05-13 06:53:48
4月13日,我司投資興建的全新"無塵自動化裝配車間"正式投產使用,該車間將承擔拓普聯科所有Pogo Pin的生產組裝任務.這將為拓普聯科未來五年的發展奠定了重要基礎.相比之前
2016-07-22 16:37:06
實現正常的動作流程外,還配置了力和位移監控,壓力監控,安全防護,不合格報警,還可根據配置追溯,查詢,遠程監控等各種功能模塊,符合汽車工業要求。全自動電機裝配線隨著行業的發展,漸漸的電機生產線由半自動轉
2018-10-29 17:16:02
《自動化裝配生產線結構原理及其組成形式的詳解》由會員分享,可在線閱讀,更多相關《自動化裝配生產線結構原理及其組成形式的詳解(2頁珍藏版)》請在人人文庫網上搜索。1、自動化裝配生產線結構原理及其組成
2021-09-13 07:50:20
誰可以代做自動化基于單片機的CAN總線的長距離皮帶運輸機的監測提出設計
2015-05-14 11:36:12
介紹了鳥溪江水電廠自動化的改造和運行情況。著重闡述了時監控系統、各自動化裝置和各監測、執行元件的改造情況,以滿足“無人值班”(少人值守)的需要。【關鍵詞】鳥
2009-03-31 23:26:36 32
32 水電廠自動化元件的質量優劣直接關系到水電廠的安全運行,也影響著綜合自動化水平的提高。為此,葛洲壩大江電廠對其自動化元件進行不斷改造和優化完善,在優化選型和改造
2009-04-03 09:25:5812 文章從我國水資源概況入手,詳細闡述水電站自動化的作用、內容,進一步探討水電站自動化技術的發展方向,水電站綜合監控系統的構成、特點和功能及其在水資源開發利用過程
2009-04-09 15:40:5927 水電廠自動化元件的質量優劣直接關系到水電廠的安全運行, 也影響著綜合自動化水平的提高。為此 , 葛 洲壩大江電廠對其自動化元件進行不斷改造和優化完善, 在優化選型和
2009-04-09 16:20:3114 介紹了劉家峽水電廠 5機組擴修 中采用GE公 司方 法—— 應用 自動盤車裝置進行 軸線調整 , 確保 了機 組安裝質量和軸線調 整安全性 。實踐證 明, 該法省時 、 省 力、 操作簡單
2009-04-11 09:20:4216 龍灘水電站是國家西部大開發和 “西電東送” 的戰略項目之一 ,在南方電網結構中占有重要位置。電站能否安全可靠運行、 能否實現 “無人值班” (少人值守) ,其綜合自動化水平非
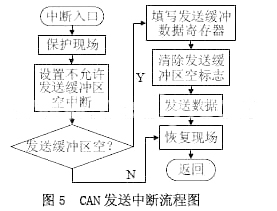
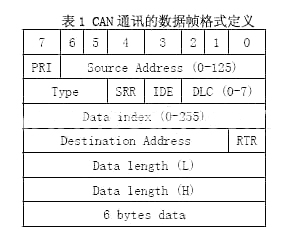
2009-04-11 10:36:0431 介紹了基于CAN 總線的分布式潛水電機監控系統,分析了系統的構成及實現方法,簡述了控制節點、CAN/RS232 接口的通信流程。
The distributed submersible motor monitor system based on C
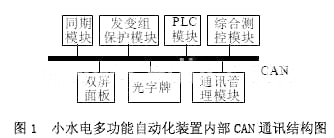
2009-05-25 11:39:1819 為解決我國目前眾多小水電站測控技術落后,設備陳舊,安全事故頻繁的現象,提高我國小水電的自動化技術水平,采用功能模塊式設計方案,各功能模塊采用CAN 總線相連,構成小
2009-05-26 14:39:1414 本文介紹了CAN總線的特性,并吸取當今先進的電站設計思想,在分析相關技術文獻、資料的基礎上,利用先進的嵌入式控制技術,PLC技術及現場總線通信技術等進行系統設計,給出
2009-06-10 11:11:154 介紹了鳥溪江水電廠自動化的改造和運行情況。著重闡述了時監控系統、各自動化裝置和各監測、執行元件的改造情況,以滿足“無人值班”(少人值守)的需要。鳥溪江水電廠
2009-07-01 15:02:3713 介紹了一種基于CAN 總線的多功能大型糧倉遠程監測系統,詳細描述了系統的總體結構原理、硬件電路組成和軟件的設計。該系統不僅能實時監測溫度和濕度,而且還能監測糧食蟲害
2009-07-30 15:41:3110 介紹了工業組態軟件WinCC及其一般組態方法,結合水電廠監控的特點和要求,論述了軟件在水電廠自動化監控中的應用。隨著計算機網絡技術和可編程控制器(PLC)及現場總線技術(
2009-08-11 11:07:5130 選擇合適的通信方式是實現小型水電站全面管理和監控的關鍵。本文敘述了小水電站自動監控對通信的要求,就單對線路高速對稱數字用戶
2009-09-14 08:22:3115 為了便于小水電站操作人員直觀實時地觀察機組的工作狀態,提高工作效率,以圖形顯示的方式來實現人機交互是非常好的方案。采用Amulet 開發套件對小水電站綜合測控裝置進行圖
2009-09-14 16:19:528 隨著計算機監控技術在中小水電站的廣泛應用,如何作好計算機監控系統的運行維護工作,對保障電站安全、優質、經濟運行具有十分重要的意義。本文就如何作好中小型水電站計
2010-02-03 15:46:4617 海南松濤水利工程管理局有小水電站13座,裝機31臺,單機容量從200kW至10000kW不等。這些渠道跌水電站普通使用同步表法的手動準同期,把發電機并入電網。但運行實踐證明,發電機
2010-02-06 15:13:0219 在分析傳統調偏裝置的優缺點基礎上, 研制了一種新型的具有跑偏自動校正和保護功能的機電一體化裝置, 介紹了其工作原理及使用效果。
2010-10-08 15:45:5143 多功能保護裝置:本裝置能對電機過載,斷相,短路,漏電等進行保護,并具有1KHZ音頻報警功能。電路如圖所示,以時基電路555為核心組成。
2007-12-19 20:16:43722 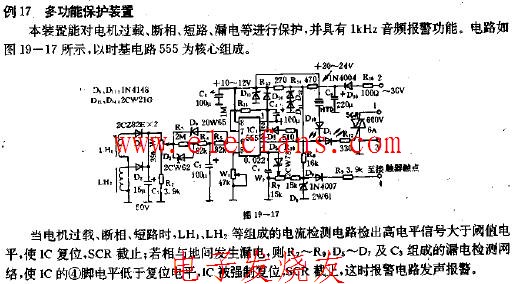
CAN總線在糧情自動檢測系統中的應用
介紹基于CAN的糧情自動檢測系統的設計,著重討論了利用CAN總線進行通信的通信規程。 關鍵詞:糧情;自動檢測
2009-05-26 16:20:03904 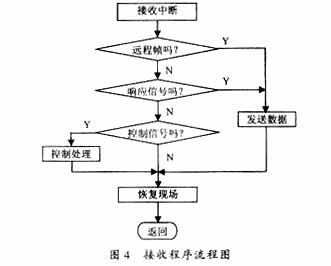
CAN總線在分布式變電所自動化系統中應用隨著微機和電子技術的飛速發展,越來越多的智能裝置在變電所中得到應用,極大地提高了變電所測量和控制
2009-10-25 10:51:09443 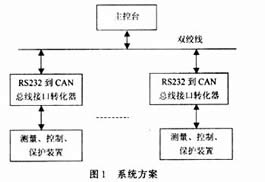
基于CAN總線和DSP的起重機多功能安全監控系統
介紹了一種基于數字信號處理器ADSP2105和現場總線技術的起重機多功能安全監控系統。該系統由最小系
2009-12-08 15:29:38618 
基于PIC單片機的CAN總線擴展技術
0 引 言
CAN總線是一種串行多主站局域網總線,被廣泛應用于汽車控制系統、自動控制、樓宇自動化、醫學設備等各
2009-12-23 09:42:061182 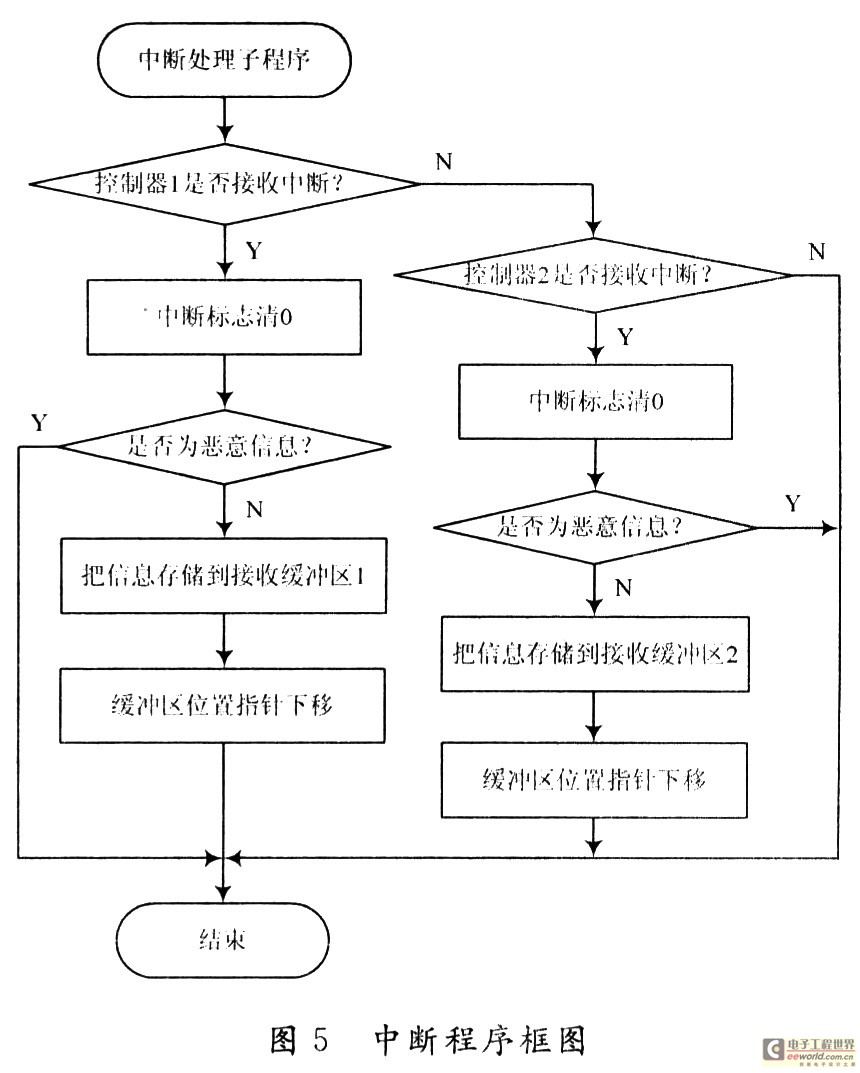
什么是CAN總線
現場總線是當今自動化領域技術發展的熱點之一,被譽為自
2010-01-12 15:38:263116 
CAN總線系統測試技術簡介
【摘 要】 CAN總線作為現場總線的一種,在汽車、船舶、航天、工業測控與工業自動化等領域已經得到廣泛的應用。CAN總線
2010-03-11 11:22:358945 1、S1853J多功能便攜式自動識別裝置吸取了國內外同類產品的優點,結合先施科技(Sense Technology)多年自動識別領域的開發和應用經驗,采用國際先進的制造工藝精雕細鑿而成,外形及
2011-03-22 12:11:3942 本文提出了一套電控自動離合器的控制器方案, 并進行了系統的軟硬件開發, 初步實現了自動離合器的基本功能, 設計了CAN 總線接口。
2011-03-31 11:23:192288 
介紹了在小水電站的供水系統(技術供水和消防供水) 中, 一種替代常規的基于PLC 的 恒壓供水 系統的構成和工作原理。系統采用變頻調速方式自動調節供水泵電機轉速或加、減泵。改變
2011-06-17 17:09:4385 電子發燒友為您提供了水電廠自動化控制系統!
2011-06-21 09:41:4310878 
隨著電力自動化技術的不斷完善和提高,越來越多的小水電站采用了計算機控制設備。在提高電站自動化水平的同時,設備的耐過電壓水平卻直線下降,特別是在遭遇雷擊時,很容易造
2011-09-28 11:39:461692 
三菱PLC(可編程邏輯控制器)編程實例項目例程
2016-12-16 16:23:156 現場總線在機械加工自動化中的應用
2017-02-07 18:09:209 水電站電器自動化是一門集通信、計算機、微機電等技術為一體的綜合性技術,這項技術的運用主要通過對水電站相關設備進行監控達到安全高效運行的目的。水電站電氣自動化技術是未來的發展方向。本文簡要介紹電氣
2017-10-16 11:07:264 隨著我國經濟近年來的發展和配網建設的加快,山區小水電呈逐年增長的趨勢。當前,山區配電網的電壓調節能力較低,由于小水電存在季節性特點,在豐水期所發出的電能無法就地平衡,因此在其分布區域的周邊會產生
2018-05-23 10:21:001189 賽德麗董事長劉俊才將在第十一屆高工鋰電產業峰會上“高鎳三元前驅體成套自動化裝備如何‘降本增效’”主題演講。
2018-04-18 17:46:014736 基于CAN總線的液位控制裝置的設計課程設計論文
2018-04-24 11:16:1324 日前,赤水市水務部門消息稱,該市擬拆除鴨嶺河電站、丙安河二級電站、習水河紅光電站、大同河玉蓮池電站、母豬洞電站5座小水電站,以還水于河、恢復河流生態和消除安全隱患。
2020-03-30 16:00:21818 化工生產過程自動化,就是在化工設備上,配置一些自動化裝置,代替操作人員的部分直接勞動,使生產在不同程度上自動地進行。這種用自動化裝置來管理化工生產過程的方式,就稱為化工生產過程的自動化,簡稱化工自動化。
2020-08-26 10:16:106427 總線是當今自動化領域技術發展的熱點之一,被譽為自動化領域的計算機局域網。 一般工程師們都知道在汽車中大部分都會用到CAN總線,其實還有許多的船艦電子設備通信也會用到CAN總線,現在CAN總線的適用范圍越來越廣泛。 CAN總線的優勢是網絡各節點之間的數據通信實時性強、開發
2021-08-07 16:37:1317486 2020年新冠疫情爆發,各種應對傳染的設備層出不窮,從負壓病房、負壓救護車及方艙都離不開一個核心部件負壓凈化裝置,為防止病毒擴散傳播。 烯泰負壓凈化裝置,負壓凈化裝置主要有負壓吸引系統、殺菌系統
2021-08-26 17:01:53485 隨著社會不斷持續發展,企業生產的技術不斷提高,大多企業開始自動化裝配線了。自動化裝配主要有效地增加額外的增長率和提高生產速度,可讓企業更好的資金回收。不但為企業減少了資金成本,也能提高生產效率和品質。那么自動化裝配線有那此特證呢!下面我們一起來看看吧!
2021-08-30 10:39:331751 引言 CAN總線以其開發維護成本低、總線利用率高、傳輸距離遠(最遠可達10 km)、傳輸速率高(最高可達1 Mbps)使用戶能組建穩定、高效的現場總線網絡。CAN總線已被廣泛應用到各個自動化
2021-10-28 19:36:1516 ),是一種用于實時應用的串行通訊協議總線,它可以使用雙絞線來傳輸信號,是世界上應用最廣泛的現場總線之一。CAN協議用于汽車中各種不同元件之間的通信,用來取代昂貴而笨重的配電線束。CAN協議的使用廣泛這一特點使其很快延伸到自動化控制以及工業領域中。 CAN協議的特性包括完
2022-01-15 17:04:485782 WFL系列同步發電機可控硅勵磁系統符合國家和電力行業有關大中型水輪發電機靜止整流勵磁系統及裝置的各項技術性能指標和規定。其WFL8000勵磁系統屬雙微機多通道調節系統,WFL6000勵磁系統屬微機
2022-08-17 11:25:341382 
某新能源車型多功能方向盤模塊采用LIN總線和CAN總線通信形式,模塊內含觸屏按鍵、實體按鍵、按鍵背光和按響功能等。
2022-09-14 11:12:421493 電子發燒友網站提供《多功能自動化系統開源分享.zip》資料免費下載
2022-11-08 15:34:550 電子發燒友網站提供《視頻游戲任務自動化裝置.zip》資料免費下載
2022-11-08 14:33:580 平升電子小水電站最小下泄生態流量在線監測預警系統建設實施方案要求實時監測水電站下泄流量數據,視頻/圖像監控泄水口實況,將現場信息遠程傳輸至省級水利、環保監管平臺,實現實時監管和數據共享
2022-12-29 11:43:43883 
案例研究:用于自動化裝配的 SCARA 和笛卡爾/龍門機器人
2023-03-13 16:10:04849 
博森源全自動化設計多功能推拉力測試機:全自動化設計多功能推拉力測試機是一種用于測試各種材料和零部件的力學性能的設備,通常用于材料研究、質量控制、產品開發等領域。其測試原理是通過施加推力或拉力,測量材料的變形和破壞情況,從而評估材料的力學性能。
2023-05-31 17:57:36390 
點擊關注,電磁兼容不迷路。什么是CAN總線CAN總線是一種廣泛用于汽車、工業自動化和其他領域的串行通信協議。它允許多個設備共享通信線路,傳輸數據以及控制信號。CAN總線有兩個不同的版本
2023-04-21 09:42:31639 
通過對蓄熱式熱氧化裝置運行控制模式的介紹,闡述了蓄熱式熱氧化裝置多個儀表設置的安全問題,根據聯鎖停爐的控制方式
2023-06-28 14:12:21618 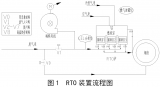
是自主研發的一款 ETHERCAT 從站功能的通訊網關。該產品主要功能是將各種 CAN 總線和 ETHERCAT 網絡連接起來。
2023-07-06 09:55:58514 
小水電站生態流量監測設施的建設,目的是為保障河湖生態用水,推進小水電綠色發展,維護河流健康生命,有效監管小水電站生態流量泄放,但是如何建設小水電站生態流量監管平臺?監測設備設施怎么選擇?還有好多朋友
2023-07-07 11:19:30440 
是自主研發的一款 ETHERCAT 從站功能的通訊網關。該產品主要功能是將各種 CAN 總線和 ETHERCAT 網絡連接起來。
2023-07-31 09:07:29349 
是自主研發的一款 ETHERCAT 從站功能的通訊網關。該產品主要功能是將各種 CAN 總線和 ETHERCAT 網絡連接起來。
2023-10-31 18:30:00437 
認識CAN 總線錯誤的第一步就是了解認識CAN 總線協議和它的具體功能,這樣才能更容易地理解CAN 總線是如何去發現并解決錯誤的。
2023-08-14 15:18:463228 
CAN總線(Controller Area Network)是一種廣泛應用于汽車、工業自動化和其他領域的串行通信協議。以下是幾種常見的CAN總線通信協議。
2023-08-18 14:40:128848 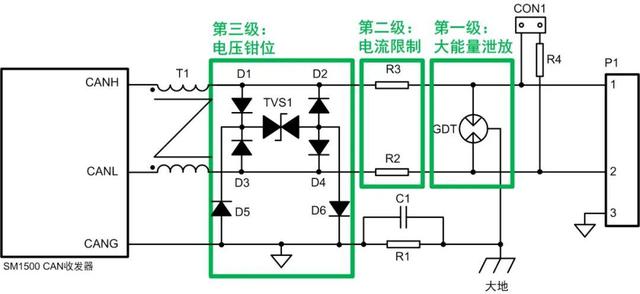
性和可靠性高的通信方式,因此在控制技術、自動化技術、車輛網絡和工廠自動化等領域中被廣泛使用。 CAN總線的傳輸速率通常表示為位/秒或波特率,是指每秒鐘傳輸的位數,它對于CAN總線的傳輸速度非常關鍵。CAN總線的傳輸速率通常從低到高可分為以下幾種類型: 1. CAN 2.0A 125kbps(
2023-09-07 15:05:439442 can總線為什么要用雙絞線?can總線不用雙絞線可以嗎? CAN總線是一種數據通信協議,廣泛用于汽車、航空、船舶、工業自動化、機器人等領域。CAN總線采用串行通信方式,主要用于實現多個模塊之間的通信
2023-09-14 16:48:053603 電子發燒友網站提供《基于CAN總線的自動化儀表的通訊模塊的設計方法.pdf》資料免費下載
2023-10-18 09:26:400 電子發燒友網站提供《LXI總線在自動化測量中的應用.pdf》資料免費下載
2023-10-26 09:44:390 電子發燒友網站提供《淺談飛機總裝自動化裝配生產線.pdf》資料免費下載
2023-11-03 10:14:360 生態流量是指江河湖泊水庫等水體區域保持生態環境所需要的流量,作為小水電站良性運行的重要指標,受到國家部門和企業的重點關注。 數之能基于豐富的智慧水務物聯網落地經驗,實現綠色小水電站生態流量的實時監測
2024-01-09 17:46:48154 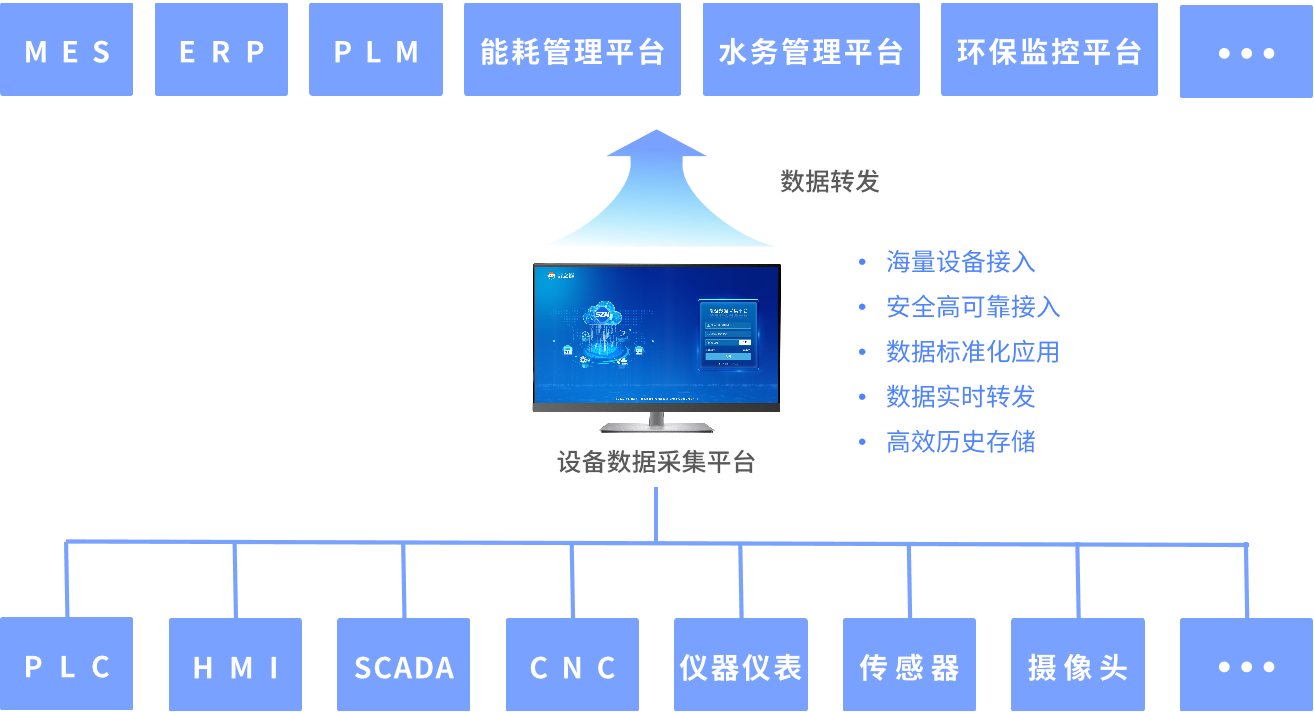
高速CAN總線和低速CAN總線的特性 高速CAN總線和低速CAN總線是兩種常見的CAN總線類型。它們在數據傳輸速率、最大電纜長度、適用場景等方面存在一些差異。下面將詳盡、詳實、細致地介紹這兩種CAN
2024-01-31 14:09:01497 can總線與485總線五大區別? CAN總線和485總線是現代工業自動化領域中常見的兩種通信總線,它們都具有一定的優勢和特點。 一、傳輸距離 CAN總線和485總線在傳輸距離上有著明顯的差異。CAN
2024-02-03 09:22:391583
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論