對于卡爾曼濾波的理解說到底,濾波,數(shù)據(jù)融合什么的就是一個(gè)數(shù)據(jù)修正,那么,如果我使用數(shù)字濾波器,將傳感器的數(shù)據(jù)進(jìn)行效果比較好的濾波,那么是否可以拋棄卡爾曼濾波呢?在一個(gè)合適的時(shí)間,用加速度和磁傳感器
2015-06-11 16:02:41
- Q_bias;//輸出值(后驗(yàn)估計(jì))的微分=角速度}//*********************************************************// 傾角計(jì)算(卡爾曼融合
2014-11-28 01:08:51
卡爾曼濾波的估計(jì)值能很好的逼近真實(shí)值,我的疑惑是,這和濾波有什么關(guān)系,請高手介紹下卡爾曼算法是如何濾波的?
2013-07-04 22:57:04
已知測量值和原始值,但測量噪聲和觀測噪聲未知,如何進(jìn)行卡爾曼濾波。之前看了好像可以用自適應(yīng)卡爾曼,但不是很懂,求例子,最好有注釋的
2017-03-23 19:12:17
卡爾曼濾波算法對比其他的濾波算法有什么優(yōu)點(diǎn)
2023-10-11 06:42:24
卡爾曼濾波算法是怎么實(shí)現(xiàn)對數(shù)據(jù)的預(yù)測處理的
2023-10-10 08:28:02
一、卡爾曼濾波九軸融合算法stm32嘗試1、Kalman濾波文件[.h已經(jīng)封裝為結(jié)構(gòu)體]Kalman.h2、I2C總線代碼[這里把MPU和HMC掛接到上面,通過改變SlaveAddress的值來
2022-02-10 07:18:25
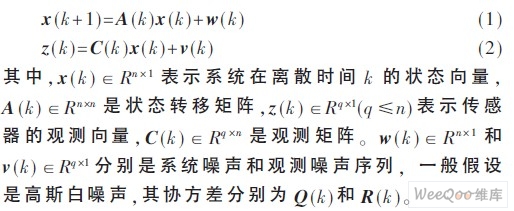
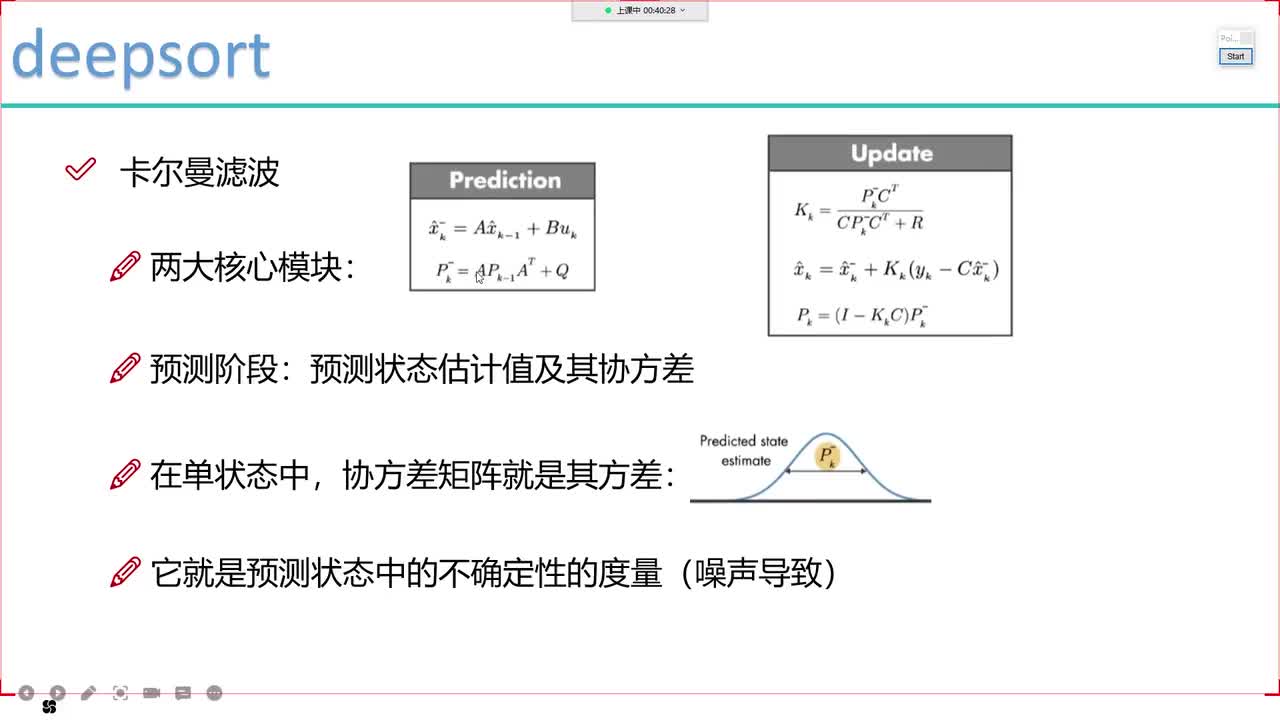
在控制領(lǐng)域,獲取控制對象**精確**的當(dāng)前狀態(tài)至關(guān)重要。但是在傳感器測量過程中由于**自身誤差**和**外部干擾**導(dǎo)致采樣值不準(zhǔn)確,卡爾曼濾波的作用就是為了**糾正**(correct)這些不準(zhǔn)確,從而得到較準(zhǔn)確的“**狀態(tài)值**”(采樣數(shù)據(jù));
2021-08-18 07:50:49
卡爾曼濾波在信號處理方面用的是比較多的,資料也是非常多的,這里就不寫了。自適應(yīng)卡爾曼濾波也有很多文獻(xiàn)有相關(guān)的介紹,其中用的比較多的有基于Sage-Husa算法實(shí)現(xiàn)的。這段時(shí)間剛好用到,順便做了一個(gè)
2021-08-18 06:49:31
我剛剛開始接觸卡爾曼濾波,用來做加速度計(jì)與陀螺儀的數(shù)據(jù)融合遇到了QR的取值問題,想求問一下大神們?nèi)=[0.001,0;0 0.01]; %系統(tǒng)噪聲協(xié)方差R=0.001; %測量噪聲協(xié)方差此時(shí)仿真
2019-04-10 22:51:01
卡爾曼濾波器是屬于一個(gè)高通濾波器還是帶通濾波器
2023-10-11 06:58:07
卡爾曼濾波風(fēng)力發(fā)電機(jī)中的風(fēng)速估計(jì),轉(zhuǎn)速估計(jì)甚至扭矩估計(jì)都設(shè)計(jì)到卡爾曼濾波,如果只是單一傳感變量的平滑處理也能用到卡爾曼濾波。振動(dòng)信號中的濾波大多采用低通去除高頻噪音,而卡爾曼濾波則是通過不確定度把
2021-07-12 06:00:47
在陀螺儀和加速度計(jì)中使用卡爾曼濾波static float P[2][2] = {{ 1, 0 }, { 0, 1 }};//協(xié)方差矩陣P的兩列代表陀螺儀、加速度計(jì)兩維,那兩行代表什么呢?為什么P的數(shù)組元素是{{ 1, 0 }, { 0, 1 }}而不是其他值?
2013-11-04 21:06:10
機(jī)器人導(dǎo)航,控制,傳感器數(shù)據(jù)融合甚至在軍事方面的雷達(dá)系統(tǒng)以及導(dǎo)彈追蹤等等。近年來更被應(yīng)用于計(jì)算機(jī)圖像處理,例如頭臉識別,圖像分割,圖像邊緣檢測等等。2.卡爾曼濾波器的介紹(Introduction
2016-09-21 11:41:07
希望這篇筆記可以幫助到你。卡爾曼濾波(Kalman filtering)是一種利用線性系統(tǒng)狀態(tài)方程,通過系統(tǒng)輸入輸出觀測數(shù)據(jù),對系統(tǒng)狀態(tài)進(jìn)行最優(yōu)估計(jì)的算法。卡爾曼濾波簡介:你可能經(jīng)常聽學(xué)長學(xué)姐提起這個(gè)...
2022-02-28 14:24:57
用于實(shí)時(shí)處理。為了克服這一缺點(diǎn),60年代Kalman把狀態(tài)空間模型引入濾波理論,并導(dǎo)出了一套遞推估計(jì)算法,后人稱之為卡爾曼濾波理論。卡爾曼濾波是以最小均方誤差為估計(jì)的最佳準(zhǔn)則,來尋求一套遞推估計(jì)的算法,其
2016-09-21 12:10:54
請問,為什么在卡爾曼濾波器模型中,要大R 小Q,原因是什么?圖1 R = 5000 * eye(2);Q = eye(6);圖2 R = 500 * eye(2); Q = eye(6);請問哪種情況追蹤效果好?
2016-05-12 18:02:53
及噪聲協(xié)方差;估計(jì)階段由回歸模型代替狀態(tài)方程和觀測方程,相應(yīng)的噪聲協(xié)方差實(shí)時(shí)自適應(yīng)調(diào)整.該方法克服了傳統(tǒng)方法容易受系統(tǒng)動(dòng)態(tài)模型不確定性和噪聲協(xié)方差不準(zhǔn)確限制的問題,仿真結(jié)果驗(yàn)證了算法的有效性卡爾曼濾波器算法(C語言)
2011-10-24 09:59:04
卡爾曼濾波器介紹
2016-08-17 12:06:34
一系列遞歸數(shù)學(xué)公式描述。它們提供了一種高效可計(jì)算的方法來估計(jì)過程的狀態(tài),并使估計(jì)均方誤差最小。卡爾曼濾波器應(yīng)用廣泛且功能強(qiáng)大:它可以估計(jì)信號的過去和當(dāng)前狀態(tài),甚至能估計(jì)將來的狀態(tài),即使并不知道模型的確
2008-07-14 13:06:49
卡爾曼濾波器原理的學(xué)習(xí)理解
2016-08-17 12:38:55
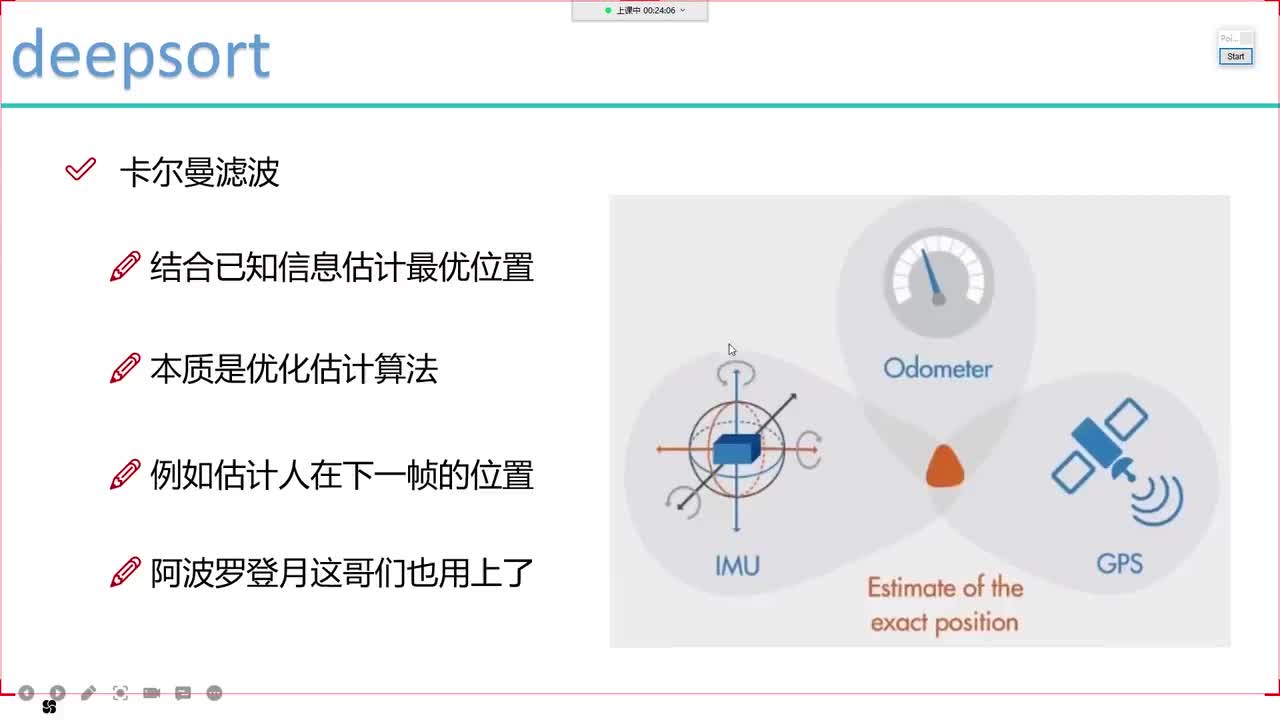
用的狀態(tài)估計(jì)方法。直觀上來講,卡爾曼濾波器在這里起了數(shù)據(jù)融合的作用,只需要輸入當(dāng)前的測量值(多個(gè)傳感器數(shù)據(jù))和上一個(gè)周期的估計(jì)值就能估計(jì)當(dāng)前的狀態(tài),這個(gè)估計(jì)出來的當(dāng)前狀態(tài)綜合考量了傳感器數(shù)據(jù)(即所謂...
2021-11-16 09:10:40
[開發(fā)工具] STM32算法的翅膀之MATLAB基于加速度計(jì)與氣壓計(jì)的三階卡爾曼濾波計(jì)算加速度、速度及高度主要介紹了卡爾曼濾波器的使用原理,給出了matlab代碼,并在STM32F407平臺對卡爾曼濾波器進(jìn)行了驗(yàn)證,傳感器為MPU6050與DPS310,測試結(jié)果令人滿意,速度與高度無累積...
2021-08-17 07:02:07
最近兩日在看卡爾曼濾波。看完理論后,從網(wǎng)上搜索了一段代碼來看,然后就懵逼了。這段代碼被人轉(zhuǎn)的次數(shù)特別多,應(yīng)該做飛控的都用過。不知道各位有沒有自己推導(dǎo)過。反正我是中間有一步不太懂。在這里先把自己弄懂
2019-08-04 19:41:37
本帖最后由 huangdewen 于 2015-4-8 23:19 編輯
收藏的一些關(guān)于卡爾曼濾波算法的教程,簡單易懂自己寫的代碼#define dt 0.001//微分時(shí)間#define
2013-09-13 17:52:42
卡爾曼濾波器通俗講解
2016-08-17 12:06:59
觀察狀態(tài)的一個(gè)重要用途是估計(jì)速度。通常在不同的關(guān)節(jié)上安裝位置傳感器(編碼器); 然而,簡單地區(qū)分位置以獲得速度會(huì)產(chǎn)生噪聲結(jié)果。為了解決這個(gè)問題,可以使用卡爾曼濾波來估計(jì)速度。卡爾曼濾波器的另一個(gè)很好的特性
2018-07-27 11:51:46
用最廣泛的就是估計(jì)理論中的卡爾曼濾波方法。與其他估計(jì)算法相比,卡爾曼濾波具有顯著的優(yōu)點(diǎn):采用狀態(tài)空間法在時(shí)域內(nèi)設(shè)計(jì)濾波器,用狀態(tài)方程就可以描述任何復(fù)雜多維信號的動(dòng)力學(xué)特性,避開了在頻域內(nèi)對信號功譜做
2018-11-14 15:12:26
算法在四軸飛行器視覺輔助導(dǎo)航方法中的應(yīng)用情況,并對比Kalman 方法,UKF 和EKF 算法融合四軸飛行器多傳感器信息的效果。
2021-05-13 06:06:01
最近正在學(xué)習(xí)卡爾曼濾波算法,用LabVIEW仿照C語言寫了個(gè)一維的卡爾曼濾波程序,不知寫的對不對,發(fā)上來希望大家指正。
2017-10-21 21:15:50
) * randn; %觀測值 %擴(kuò)展卡爾曼濾波器 %進(jìn)行估計(jì)第一階段的估計(jì) e_x_estimate_1 =2*(k-1)+2;%1 狀態(tài)估計(jì) e_y_estimate
2017-04-03 17:57:17
labview中,去哪下載卡爾曼濾波器工具包,能給個(gè)網(wǎng)址么?謝謝了~~~~~
2013-12-16 15:44:09
最近想做四軸飛行器,在論壇看到這個(gè)帖子MikroKopter:來自德國的開源四軸飛行器項(xiàng)目bbs.elecfans.com/jishu_475743_1_1.html小弟看過之后對其中有些內(nèi)容不太了解,四軸飛行器不是卡爾曼濾波最好嗎?這個(gè)mikrokopter的代碼是不是用的卡爾曼濾波器?
2015-06-11 17:27:38
,傳感器返回值都是不夠準(zhǔn)確的。需要用DSP芯片對飛行器各飛行模態(tài)的傳感器返回信息進(jìn)行處理,處理的算法是根據(jù)卡爾曼濾波理論開發(fā)的。這個(gè)項(xiàng)目的核心就是用DSP芯片對卡爾曼濾波算法進(jìn)行實(shí)現(xiàn),難點(diǎn)是研究出一種效果好的卡爾曼濾波算法。
2015-10-09 15:12:30
相應(yīng)的濾波算法卡爾曼濾波要點(diǎn)建立系統(tǒng)模型,確定濾波量 確定預(yù)測量 確定測量量 進(jìn)行五個(gè)方程計(jì)算濾波傳感器融合在陀螺儀和加速度傳感器濾波的融合中,我們得首先建立起模型(融合只適用于重力情況下,若加速度傳感器
2015-06-12 15:11:05
前一段時(shí)間看到一篇論文,里面有一部分講解卡爾曼濾波,感覺講的挺簡單易懂的,現(xiàn)在分享一下只講不分享不是真漢紙!!這里有卡爾曼濾波器simulink模型,這里作為濾波器用。如果改變一些參數(shù),也可以做辨識用。一碼多用,朋友們要記得回復(fù)啊~
2015-06-05 15:26:39
卡爾曼濾波(Kalman filtering)一種利用線性系統(tǒng)狀態(tài)方程,通過系統(tǒng)輸入輸出觀測數(shù)據(jù),對系統(tǒng)狀態(tài)進(jìn)行最優(yōu)估計(jì)的算法。由于觀測數(shù)據(jù)中包括系統(tǒng)中的噪聲和干擾的影響,所以最優(yōu)估計(jì)也可看作是濾波
2019-07-14 06:30:00
為了可以更加容易的理解卡爾曼濾波器,這里會(huì)應(yīng)用形象的描述方法來講解,而不是像大多數(shù)參考書那樣羅列一大堆的數(shù)學(xué)公式和數(shù)學(xué)符號。但是,他的5條公式是其核心內(nèi)容。結(jié)合現(xiàn)代的計(jì)算機(jī),其實(shí)卡爾曼的程序相當(dāng)
2016-09-12 22:16:05
估計(jì)很多使用mpu6050的人看網(wǎng)上卡爾曼濾波資料時(shí)看不懂下面這段程序,我找到一個(gè)資料,對其進(jìn)行了解釋。P[0][0] += dt * (dt*P[1][1] - P[0][1] - P[1][0
2017-03-25 21:07:57
網(wǎng)上搜到一篇關(guān)于卡爾曼濾波算法的論文,對低維卡爾曼濾波算法作了幾何解釋,這種解釋對卡爾曼濾波有一種直觀的理解,使人們對卡爾曼濾波有更本質(zhì)的認(rèn)識。有需要的童鞋帶走吧
2015-06-11 15:28:33
卡爾曼濾波實(shí)現(xiàn)簡單,濾波效果好 ,下面分享一個(gè)基于卡爾曼濾波的matlab算法,數(shù)據(jù)全部為一維狀態(tài),本人彌補(bǔ)的詳細(xì)備注,供愛好者研究學(xué)習(xí)。%%%%%%%%%%%%%%%%%%%功能說明:Kalman
2019-08-01 04:35:51
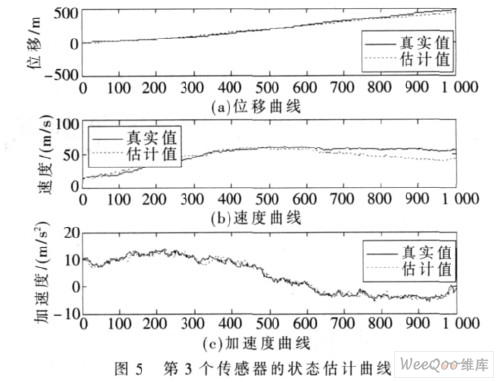
采用CarlsON 最優(yōu)數(shù)據(jù)融合準(zhǔn)則, 將基于Kalman 濾波的多傳感器狀態(tài)融合估計(jì)方法應(yīng)用到雷達(dá)跟蹤系統(tǒng)。仿真實(shí)驗(yàn)表明,多傳感器Kalman 濾波狀態(tài)融合估計(jì)誤差小于單傳感器Kalman 濾波得出的狀態(tài)估計(jì)誤差,驗(yàn)證了方法對雷達(dá)跟蹤的有效性。
2020-04-06 07:42:16
://blog.csdn.net/u011344545==========================================本文設(shè)計(jì)了一種基于STM32/51單片機(jī)的使用MPU6050傳感器的利用卡爾曼濾波器算法的角度測量儀(直接上代碼)代碼下載(附PPT)MPU-6050 :是6軸運(yùn)動(dòng)處理
2022-02-10 07:57:19
目標(biāo)跟蹤算法的研究,并加入噪聲干擾,更接近真實(shí)的軍事與民用環(huán)境。首先搭建紅外/雷達(dá)雙模導(dǎo)引頭仿真平臺,進(jìn)而設(shè)計(jì)基于多傳感器的多模型機(jī)動(dòng)目標(biāo)跟蹤算法,采用擴(kuò)展卡爾曼濾波,最終實(shí)現(xiàn)算法的軟件仿真及跟蹤性能
2018-12-05 15:16:23
本帖最后由 crux 于 2015-5-10 07:51 編輯
今日開新貼,明天發(fā)布BOM。 小車卡爾曼濾波融合算法簡介: 卡爾曼濾波的基本思想是:以最小均方誤差為最佳估計(jì)準(zhǔn)則,采用信號
2015-05-10 07:47:46
基于無跡卡爾曼濾波的四旋翼無人飛行器姿態(tài)估計(jì)算法_朱巖
2020-06-04 08:48:36
= q3 * norm;這是單變量的卡爾曼濾波器:float KalmanGain;//卡爾曼增益float EstimateCovariance;//估計(jì)協(xié)方差float
2015-05-22 15:12:20
。2.數(shù)字濾波算法的選擇根據(jù)運(yùn)動(dòng)傳感器噪聲模型,一般以下濾波算法可供融合算法選擇: a)互補(bǔ)濾波算法 b)擴(kuò)展卡爾曼濾波算法 c)無跡卡爾曼濾波算法 d)粒子濾波算法 e)Mahony互補(bǔ)濾波算法
2019-07-19 06:47:49
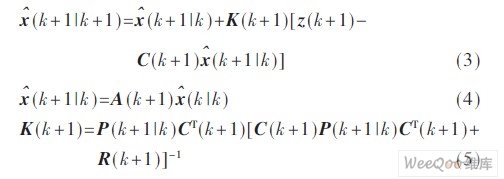
的矩陣,對于單模型單測量,I=1。當(dāng)系統(tǒng)進(jìn)入k+1狀態(tài)時(shí),P(k|k)就是式子(2)的P(k-1|k-1)。這樣,算法就可以自回歸的運(yùn)算下去。卡爾曼濾波器的原理基本描述了,式子1,2,3,4和5就是他
2015-05-22 10:47:54
` 本帖最后由 Struggle! 于 2015-5-22 11:02 編輯
逛博客看到的一篇講解卡爾曼濾波的文章,發(fā)現(xiàn)程序十分簡潔易懂,而且使用效果不錯(cuò),是一個(gè)學(xué)習(xí)的典范,在此分享了!下面附上
2015-05-22 10:58:16
摘 要:利用最優(yōu)的融合簇狀態(tài)估計(jì)的K rein 空間卡爾曼濾波方法,得到信息形式的魯棒卡爾曼濾波。簇頭節(jié)點(diǎn)通過所處簇的觀測模型,利用信息形式的魯棒卡爾曼濾波實(shí)現(xiàn)離散形式的卡爾曼濾波。簇頭節(jié)點(diǎn)將狀態(tài)
2009-10-05 17:28:51
有偏卡爾曼濾波器可以用來消除無線定位中的非視距誤差,首次使用有偏卡爾曼濾波器的參考文獻(xiàn)是下面兩篇論文[1]劉琚,李靜.一種在非視距環(huán)境中的TDOA/AOA混合定位方法[J].通信學(xué)報(bào),2005,26
2011-11-07 13:55:15
翻了一些論文,大多都是堆一下公式,然后用DSP Builder有沒有用verilog實(shí)現(xiàn)過卡爾曼濾波器的?想討論一下。整個(gè)算法實(shí)現(xiàn)下來,最大運(yùn)行頻率是多少?從輸入到輸出延時(shí)有多少?耗費(fèi)資源情況大概怎樣?
2017-09-13 10:01:01
有沒有基于9軸傳感器的三階卡爾曼濾波器算法
2023-11-06 06:00:44
系統(tǒng)動(dòng)態(tài)模型不確定性和噪聲協(xié)方差不準(zhǔn)確限制的問題,仿真結(jié)果驗(yàn)證了算法的有效性【關(guān)鍵詞】:高斯過程回歸;;平方根無跡卡爾曼濾波器;;自適應(yīng)【DOI】:CNKI:SUN:KZLY.0.2010-02-005
2010-04-24 09:04:39
*0.01;//角速度積分得到傾斜角度.//-------卡爾曼濾波融合-----------------------Kalman_Filter(Angle_ax,Gyro_y); //卡爾曼濾波計(jì)算傾角
2019-03-28 06:08:01
算法完成實(shí)現(xiàn)什么功能?比如我是不是可以這樣:先寫卡爾曼濾波器算法,然后添加程序追蹤鼠標(biāo)位置程序,最后運(yùn)行實(shí)現(xiàn)就可以了?{:4_97:}那那個(gè)轉(zhuǎn)換測量是什么意思??謝了各位啊~
2013-01-15 12:29:16
數(shù)據(jù)融合甚至在軍事方面的雷達(dá)系統(tǒng)以及導(dǎo)彈追蹤等等。近年來更被應(yīng)用于計(jì)算機(jī)圖像處理,例如頭臉識別,圖像分割,圖像邊緣檢測等等。二、卡爾曼濾波器的通俗理解。這是網(wǎng)上的關(guān)于解釋卡爾曼濾波器原理的一個(gè)經(jīng)典例子
2016-06-17 14:59:09
本帖最后由 南中南 于 2015-12-31 11:01 編輯
四軸飛行器組合導(dǎo)航非線性濾波算法基于展卡爾曼濾波和不敏卡爾曼濾在四軸飛行器中的數(shù)學(xué)模型,研究擴(kuò)展卡爾曼濾波( Extended
2015-12-31 10:53:54
卡爾曼濾波器可以從數(shù)據(jù)序列中排除干擾噪聲,使用卡爾曼濾波器可以從不完整的信息給出一個(gè)不斷變化中復(fù)雜系統(tǒng)的最優(yōu)估計(jì)。我們把某種網(wǎng)絡(luò)抽象為一個(gè)電阻,現(xiàn)在我們要用傳感器(當(dāng)然不是簡單的萬用表歐姆檔測電阻哈
2019-05-22 07:06:05
(英文版)MATLAB在卡爾曼濾波器中應(yīng)用的理論與實(shí)踐KalmanfilteringtheoryandpracticeusingMATLAB-email
2020-03-12 12:35:17
介紹了基于多傳感器信息融合技術(shù)的聯(lián)合卡爾曼濾波器的一般設(shè)計(jì)方法,并將此方法運(yùn)用于艦船INS/ GPS/ Loran2C 組合導(dǎo)航系統(tǒng)中。理論分析與仿真結(jié)果表明,該聯(lián)合卡爾曼濾波器的設(shè)計(jì)合
2009-06-25 08:35:41 32
32 本文將強(qiáng)跟蹤濾波理論與多傳感器數(shù)據(jù)融合技術(shù)相結(jié)合,提出基于強(qiáng)跟蹤濾波器的多傳感器狀態(tài)與參數(shù)聯(lián)合估計(jì)新算法;對擁有相同采樣率的分布式多傳感器單模型非線性動(dòng)態(tài)系統(tǒng),
2009-06-30 10:43:5019 對集中濾波器和分散濾波器的性能特點(diǎn)進(jìn)行了比較和分析,指出了它們應(yīng)用于多傳感器系統(tǒng)時(shí)的不足之處,提出了聯(lián)合卡爾曼濾波器的結(jié)構(gòu)和算法,并在精度、計(jì)算效率和容錯(cuò)能力方
2009-07-09 13:47:0635 介紹了基于多傳感器信息融合技術(shù)的聯(lián)合卡爾曼濾波器的一般設(shè)計(jì)方法,并將此方法運(yùn)用于艦船$I& L MN& L %D)*5 O 0 組合導(dǎo)航系統(tǒng)中。理論分析與仿真結(jié)果表明,該聯(lián)合卡爾曼
2009-07-11 11:05:5017 擴(kuò)展卡爾曼濾波估計(jì)載波參數(shù)的算法研究:提出了一種在接收信號幅度未知的情況下進(jìn)行載波參數(shù)估計(jì)的擴(kuò)展卡爾曼濾波算法,該算法把信號幅度及偽碼自相關(guān)的乘積作為一個(gè)獨(dú)立變
2009-10-20 18:04:1834 電池SOC的自適應(yīng)平方根無極卡爾曼濾波估計(jì)算法,下來看看
2017-01-13 13:26:0218 電池SOC的自適應(yīng)平方根無極卡爾曼濾波估計(jì)算法_胡志坤
2017-01-07 17:16:231 一種基于增量式卡爾曼濾波器的PMSM轉(zhuǎn)速濾波算法_肖曦
2017-01-08 11:28:385 卡爾曼濾波(Kalman filtering)一種利用線性系統(tǒng)狀態(tài)方程,通過系統(tǒng)輸入輸出觀測數(shù)據(jù),對系統(tǒng)狀態(tài)進(jìn)行最優(yōu)估計(jì)的算法。由于觀測數(shù)據(jù)中包括系統(tǒng)中的噪聲和干擾的影響,所以最優(yōu)估計(jì)也可看作是濾波
2017-10-29 11:57:09 28424
28424 
針對慣性導(dǎo)航應(yīng)用中,姿態(tài)解算與外力加速度估計(jì)互相干擾的問題,提出一種基于四元數(shù)和擴(kuò)展卡爾曼濾波器的姿態(tài)解算與外力加速度同步估計(jì)算法。首先,利用估計(jì)的外力加速度修正傳感器加速度數(shù)據(jù)得到準(zhǔn)確的反向
2017-12-19 14:11:576 卡爾曼濾波器是一種由卡爾曼(Kalman)提出的用于時(shí)變線性系統(tǒng)的遞歸濾波器。這個(gè)系統(tǒng)可用包含正交狀態(tài)變量的微分方程模型來描述,這種濾波器是將過去的測量估計(jì)誤差合并到新的測量誤差中來估計(jì)將來的誤差。
2018-02-07 18:06:464690 
用的狀態(tài)估計(jì)方法。直觀上來講,卡爾曼濾波器在這里起了數(shù)據(jù)融合的作用,只需要輸入當(dāng)前的測量值(多個(gè)傳感器數(shù)據(jù))和上一個(gè)周期的估計(jì)值就能估計(jì)當(dāng)前的狀態(tài),這個(gè)估計(jì)出來的當(dāng)前狀態(tài)綜合考量了傳感器數(shù)據(jù)(即所謂...
2021-11-09 13:06:041 在很多實(shí)際工程問題當(dāng)中,非線性系統(tǒng)占大多數(shù),而卡爾曼提出來的卡爾曼濾波器是一種針對線性系統(tǒng)的估計(jì)算法[1]。 為了解決這一問題,Schmidt學(xué)者分析了卡爾曼濾波器中的系統(tǒng)模型部分,并提出將卡爾
2022-08-12 10:06:324595 
卡爾曼濾波的最終輸出是,真實(shí)的狀態(tài)為,令 對誤差的平方求最小值,同樣可以推導(dǎo)出公式(1-5)到公式(1-7)。因此卡爾曼濾波器也是系統(tǒng)狀態(tài)的最優(yōu)估計(jì)。
2022-12-15 10:45:132079 卡爾曼濾波是一種線性最小方差估計(jì),是一種最優(yōu)估計(jì)算法。 其采用遞推算法,通常只要系統(tǒng)的初始狀態(tài)和初始誤差矩陣已知,根據(jù)導(dǎo)出公式,就可對
系 統(tǒng)狀態(tài)做出較為精確的估計(jì)。 使用狀態(tài)空間法在時(shí)域內(nèi)設(shè)計(jì)濾波器,其離散型算法較容易實(shí)現(xiàn)數(shù)字化。
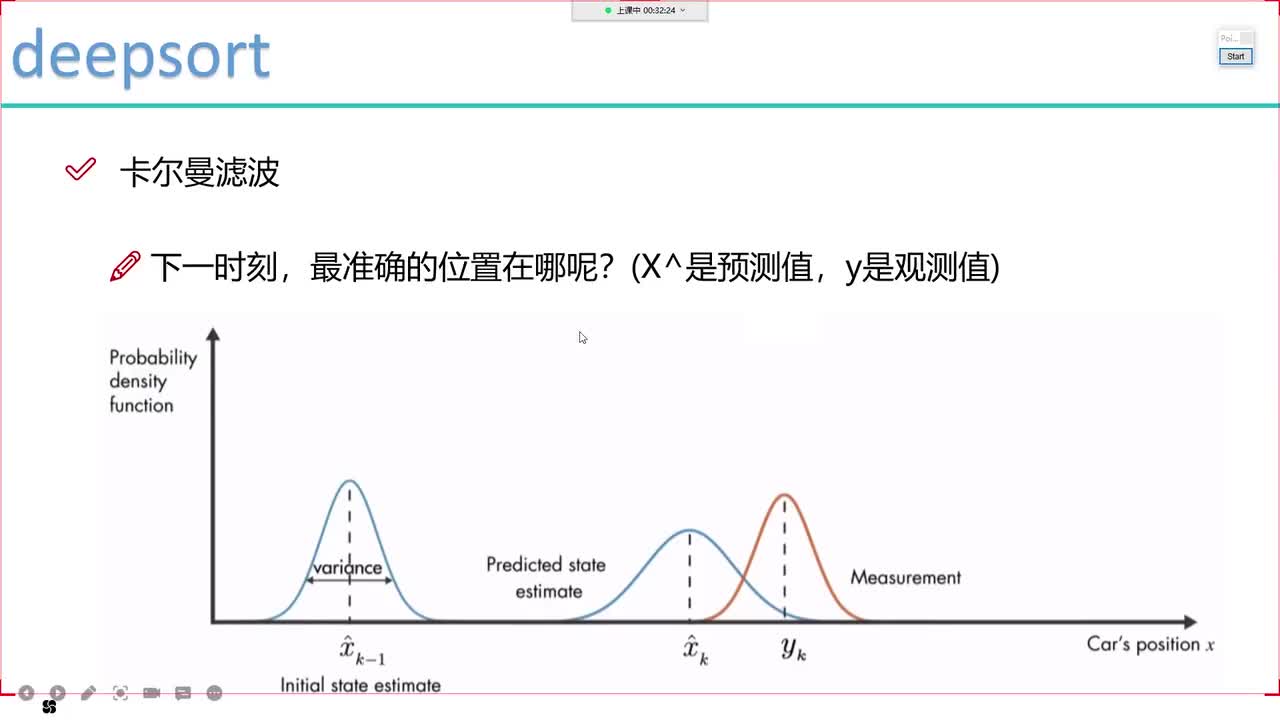
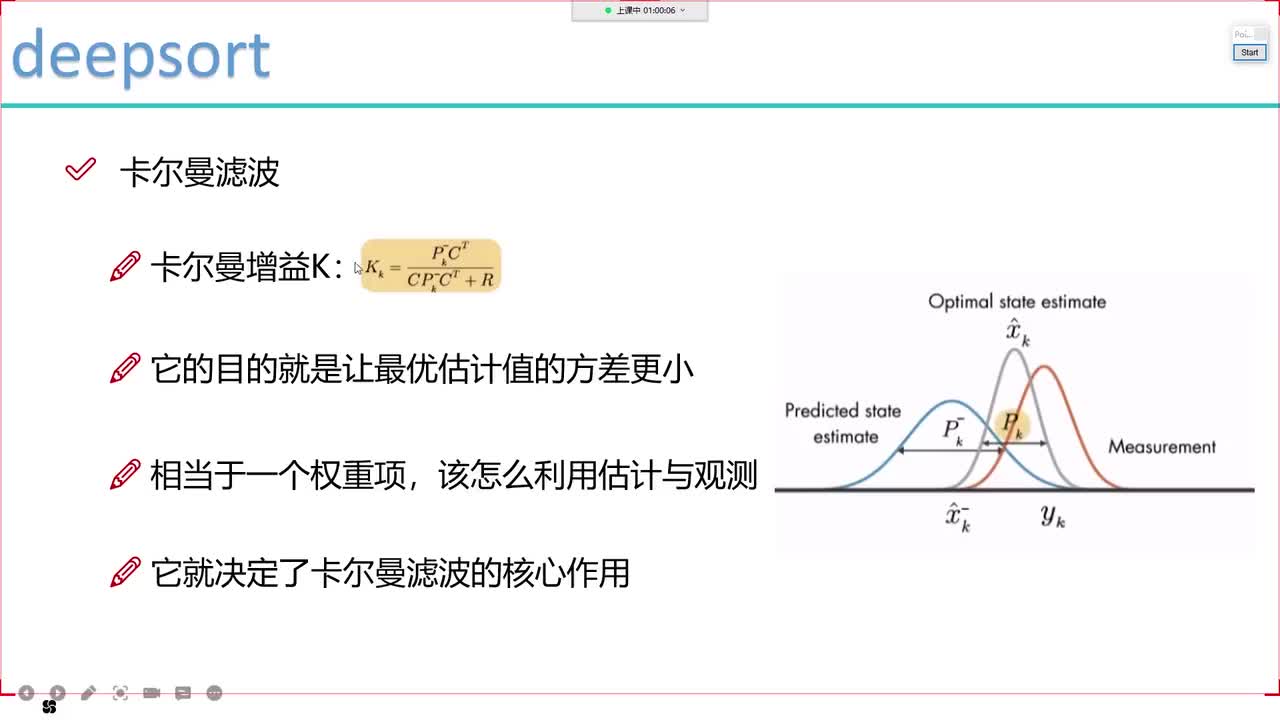
2023-03-14 10:38:451 卡爾曼濾波是一種用于估算線性動(dòng)態(tài)系統(tǒng)狀態(tài)的優(yōu)化算法,其基礎(chǔ)數(shù)學(xué)理論為貝葉斯定理,將傳感器測量值和系統(tǒng)模型的預(yù)測值進(jìn)行融合,得到對系統(tǒng)狀態(tài)的估計(jì)。
2023-08-30 10:18:351327 卡爾曼濾波(Kalman Filter)是一種用于估計(jì)狀態(tài)的算法,最初由R.E. Kalman在1960年提出。它是一種線性高斯濾波器,常用于處理包含誤差噪聲的動(dòng)態(tài)系統(tǒng)。卡爾曼濾波算法通過組合測量
2024-01-17 10:51:51401
 電子發(fā)燒友App
電子發(fā)燒友App



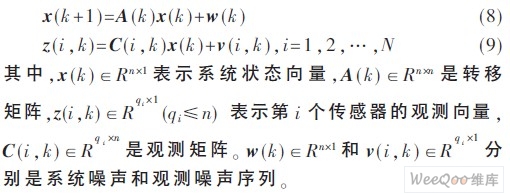

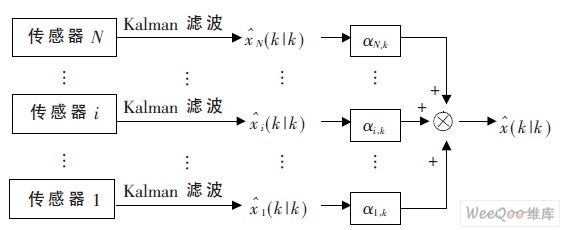
 分別表示狀態(tài)基于傳感器i 觀測信息的Kalman 濾波估計(jì)值和相應(yīng)的估計(jì)誤差協(xié)方差陣, 對于i=1 ,2,…,N, 假設(shè)
分別表示狀態(tài)基于傳感器i 觀測信息的Kalman 濾波估計(jì)值和相應(yīng)的估計(jì)誤差協(xié)方差陣, 對于i=1 ,2,…,N, 假設(shè) 不相關(guān), 則最優(yōu)聯(lián)邦濾波器最優(yōu)數(shù)據(jù)融合準(zhǔn)則由下式給出:
不相關(guān), 則最優(yōu)聯(lián)邦濾波器最優(yōu)數(shù)據(jù)融合準(zhǔn)則由下式給出:



 的估計(jì)誤差協(xié)方差。
的估計(jì)誤差協(xié)方差。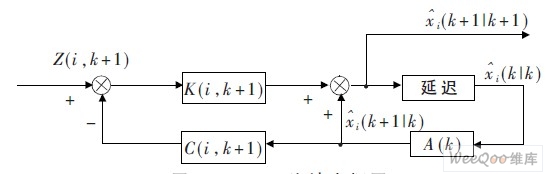
 ,其中
,其中 和
和









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論