 電子發(fā)燒友App
電子發(fā)燒友App


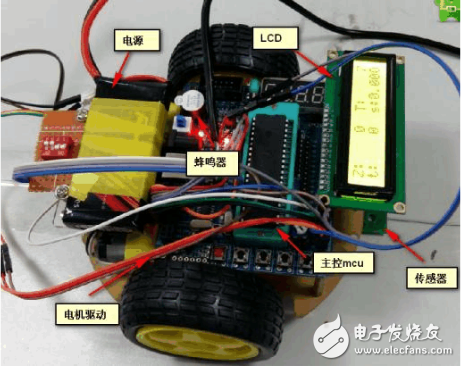
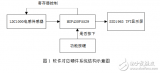
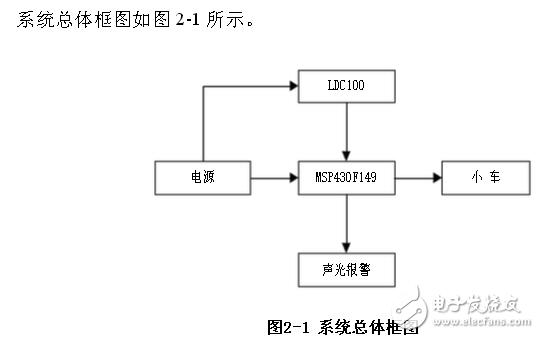
以LDC1000電感/數(shù)字轉(zhuǎn)換器為核心,設(shè)計并制作了一個可自動根據(jù)鐵絲形狀循跡小車。系統(tǒng)的主要功能模塊包括:主控模塊、金屬信號探測模塊、速度檢測模塊,電機驅(qū)動模塊及電源模塊。系統(tǒng)主控芯片STC89C52根據(jù)檢測到的金屬距離信號,判斷小車是否偏離軌道,從而做出方向調(diào)整,使小車能夠在規(guī)定的平面跑道自動按一定方向自動循跡。
循軌廣泛應(yīng)用很于工業(yè)自動化及系統(tǒng),而循跡的方式有很多種,每種都有其缺點。機械鏈條式軌道存在磨損占用地方;光電慢反射檢測式需要軌道為黑色、受環(huán)境光影響比較大;攝像頭模式識別式需要很好的識別算法,受環(huán)境光影響也比較大。
基于此,本文采用LDC1000對鐵絲進行檢測判斷,實現(xiàn)自動循軌應(yīng)用。
LDC1000簡介
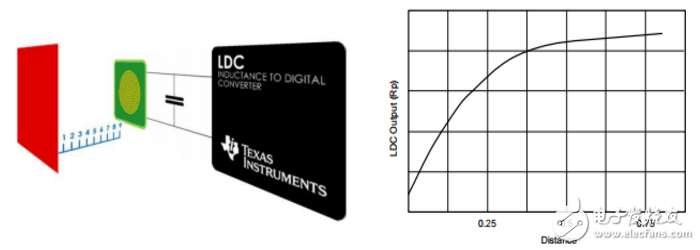
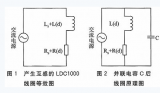
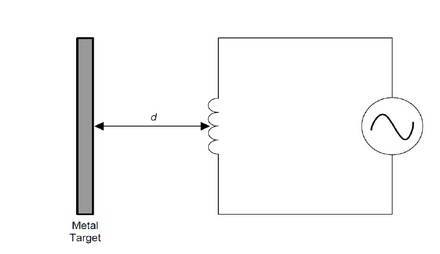
LDC1000是美國德州儀器公司TI推出的一塊全新的電感數(shù)字轉(zhuǎn)換器(LDC),具有低功耗,小封裝,低成本的優(yōu)良性質(zhì)。它的SPI界面可以很方便的連接MCU。LDC1000只需要外接一個PCB線圈或者自制線圈就可以實現(xiàn)非接觸式電感檢測。LDC1000的電感檢測并不是指像Q表那樣測試線圈的電感量,而是可以測試外部金屬物體和LDC1000相連的測試線圈的空間位置關(guān)系。
利用LDC1000這個特性配以外部設(shè)計的金屬物體即可很方便實現(xiàn),水平或垂直距離檢測;角度檢測;位移監(jiān)測;運動檢測;振動檢測;金屬成分檢測;可以廣泛應(yīng)用在汽車、消費電子、計算機、工業(yè)、通信和醫(yī)療領(lǐng)域。
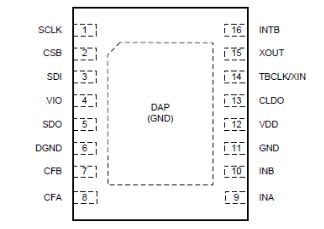
stc89c52 與LDC1000接口

mcu與LDC1000接口圖
使用stc89c52的io口模擬spi接口,和從機(LDC1000)進行通訊的時候,應(yīng)該遵循以下幾個步驟:
片選信號置零;
stc89c52通過模擬SPI線向LDC1000寫入訪問寄存器地址,其中最高位0表示寫入,1表示讀出,其余7位為寄存器的地址;
占據(jù)八個時鐘周期,這段時間內(nèi)SDO線處于高阻狀態(tài);
如果命令在讀寫狀態(tài)時,傳輸?shù)臄?shù)據(jù)最高位為1,SDO在線發(fā)送來自其他地址寄存器的8位字節(jié);
如果命令在讀寫狀態(tài)時,SDI線接收來自stc89c52的8位字節(jié)數(shù)據(jù)寫入相應(yīng)的寄存器中;
片選信號置高,釋放對該從機的控制。
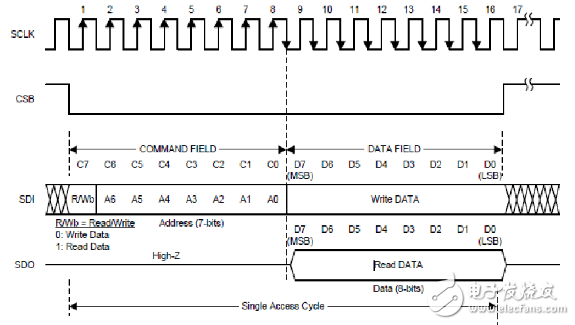
LDC1000 SPI 讀寫時序圖
stc89c52 驅(qū)動程序設(shè)計
根據(jù)LDC1000的spi接口時序設(shè)計如下驅(qū)動程序:
// 讀1B數(shù)據(jù)
unsigned char Ldc_SPIread(void);
//寫1B數(shù)據(jù)
void Ldc_SPIwrite(unsigned char ch);
//寫寄存器
void LDC1000_WriteReg(unsigned char addr, unsigned char dat);
//讀寄存器
unsigned char LDC1000_ReadReg(unsigned char addr);
//芯片初始化
void LDC1000_Init(void);
//讀取距離參數(shù)
?
unsigned int ReadValue(void);
控制邏輯
小車車頭布置感應(yīng)天線,當(dāng)小車沿鐵絲向前行車時,由于特殊原因(如路面不平,小車的車輪不對稱等原因)導(dǎo)致車身偏離軌道,出現(xiàn)A,B,C三種情況。(如下圖)。
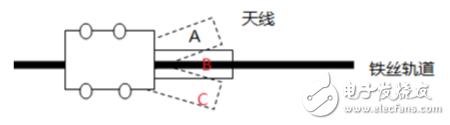
A,B,C 三種情況的天線下,利用函數(shù)ReadValue()得到的數(shù)值為Fa,F(xiàn)b,F(xiàn)c. 三者間的關(guān)系為Fa《Fb, Fc《Fb. 為此,當(dāng)檢測到數(shù)值為Fb時小車直行,否則小車轉(zhuǎn)彎。左轉(zhuǎn)與右轉(zhuǎn)根據(jù)轉(zhuǎn)彎的幅度做調(diào)整。 程序流程如下:
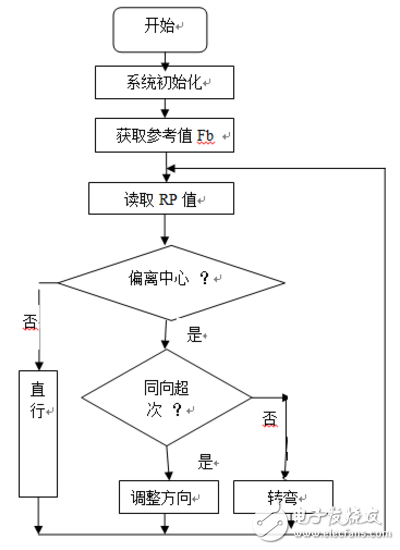
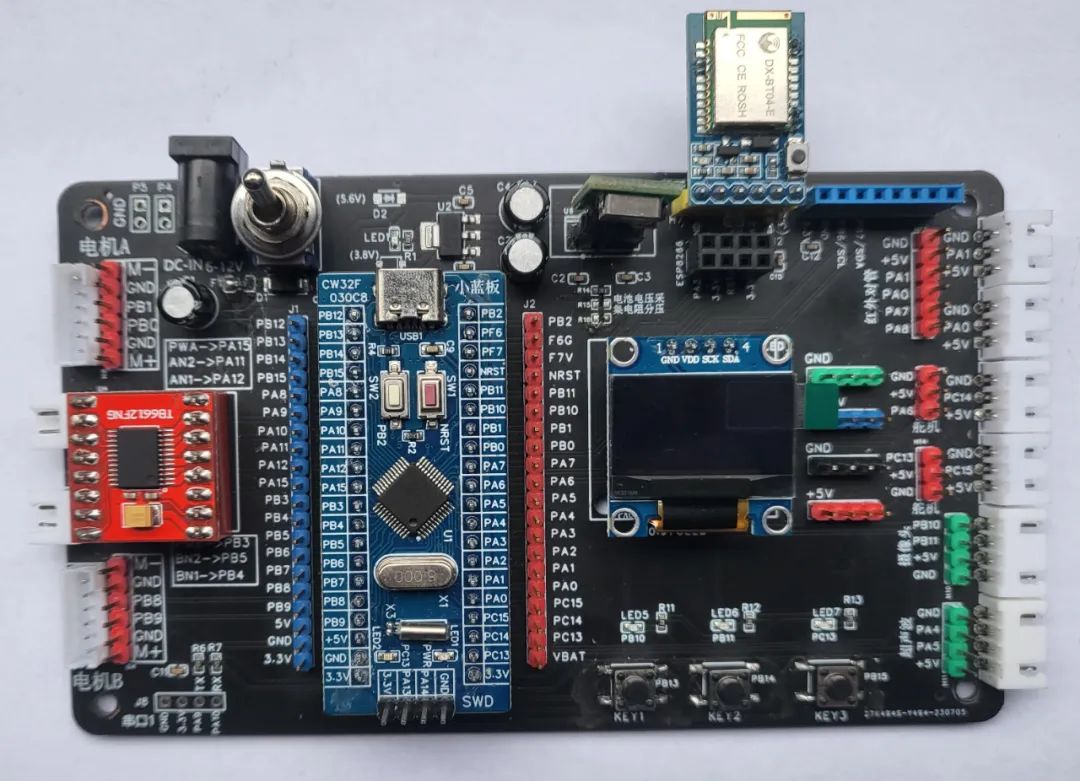
根據(jù)以上原理制作了系統(tǒng)軌道,實驗小車,并利用串口檢測系統(tǒng)監(jiān)測的鐵絲數(shù)據(jù)。鐵絲的直徑0.9mm以上,循軌小車包括控制主板、顯示、光電測速、電機、藍牙收發(fā)模塊等。根據(jù)車身是否偏離軌道監(jiān)測到的采樣數(shù)據(jù)。

總結(jié):
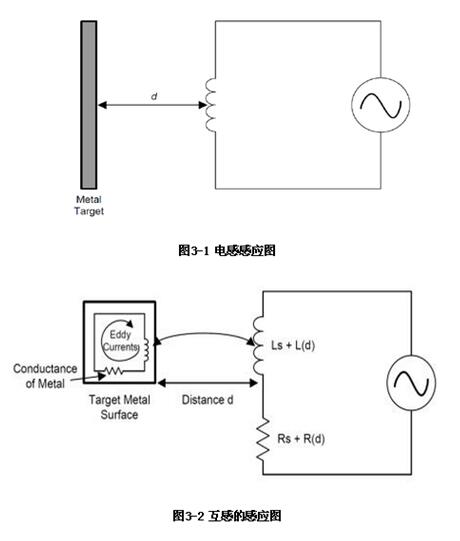
利用PCB線圈或自制線圈可以實現(xiàn)非接觸式電感線圈檢測,通過分析待測金屬物體對電感線圈磁場的影響可以很方便地實現(xiàn)金屬檢測。經(jīng)實測,通過合理設(shè)置模塊寄存器值,可以有效檢測3cm距離的金屬。外界光照條件對本系統(tǒng)沒有太大的影響,而且還必須能夠在一定的距離內(nèi)快速檢測到金屬并能夠辨別金屬類型。
附:LDC1000驅(qū)動程序
#include “reg52.h”
// LDC COMMANDS
#define LDC1000_CMD_REVID 0x00
#define LDC1000_CMD_RPMAX 0x01
#define LDC1000_CMD_RPMIN 0x02
#define LDC1000_CMD_SENSORFREQ 0x03
#define LDC1000_CMD_LDCCONFIG 0x04
#define LDC1000_CMD_CLKCONFIG 0x05
#define LDC1000_CMD_THRESHILSB 0x06
#define LDC1000_CMD_THRESHIMSB 0x07
#define LDC1000_CMD_THRESLOLSB 0x08
#define LDC1000_CMD_THRESLOMSB 0x09
#define LDC1000_CMD_INTCONFIG 0x0A
#define LDC1000_CMD_PWRCONFIG 0x0B
#define LDC1000_CMD_STATUS 0x20
#define LDC1000_CMD_PROXLSB 0x21
#define LDC1000_CMD_PROXMSB 0x22
#define LDC1000_CMD_FREQCTRLSB 0x23
#define LDC1000_CMD_FREQCTRMID 0x24
#define LDC1000_CMD_FREQCTRMSB 0x25
sbit PIN_LDC_CS=P1^0;
sbit PIN_LDC_SO=P1^1;
sbit PIN_LDC_SCK=P1^2;
sbit PIN_LDC_SI=P1^3;
#define SET_PIN_LDC_SI(bValue) PIN_LDC_SI=bValue
#define GET_PIN_LDC_SO() PIN_LDC_SO
#define SET_PIN_LDC_SCK(bValue) PIN_LDC_SCK=bValue
#define SET_PIN_LDC_CS(bValue) PIN_LDC_CS=bValue
/*--------------------------------------------------------------- 功能: 讀1B數(shù)據(jù) 輸入: 無 輸出: 1B數(shù)據(jù)----------------------------------------------------------------*/
unsigned char Ldc_SPIread(void)
{
unsigned char i = 0;
ch = 0;
for(i = 0; i 《 8; i ++)
{
SET_PIN_LDC_SCK(0);
ch 《《= 1;
SET_PIN_LDC_SCK(1);
if(GET_PIN_LDC_SO())ch = ch | 0x01;
}
SET_PIN_LDC_SCK(0);
return (ch);
}
/*--------------------------------------------------------------- 功能: 寫1B數(shù)據(jù) 輸入: ch--1B數(shù)據(jù) 輸出: 無 ----------------------------------------------------------------*/
void Ldc_SPIwrite(unsigned char ch)
{
unsigned char i = 0;
for(i = 0;i 《 8;i ++)
{
SET_PIN_LDC_SCK(0);
if(ch & 0x80) SET_PIN_LDC_SI(1);
else SET_PIN_LDC_SI(0);
SET_PIN_LDC_SCK(1) ch 《《= 1;
}
SET_PIN_LDC_SCK(0)
}
//寫寄存器
void LDC1000_WriteReg(unsigned char addr, unsigned char dat)
{
addr = addr & 0x7F;
SET_PIN_LDC_CS (0);
Ldc_SPIwrite( addr);
Ldc_SPIwrite( dat);
SET_PIN_LDC_CS (1);
}
//讀寄存器
unsigned char LDC1000_ReadReg(unsigned char addr)
{
unsigned char temp;
addr = addr | 0x80;
SET_PIN_LDC_CS (0);
Ldc_SPIwrite( addr);
temp = (UINT8)Ldc_SPIread();
SET_PIN_LDC_CS (1);
return temp;
}
//芯片初始化
void LDC1000_Init(void)
{
LDC1000_WriteReg(LDC1000_CMD_RPMAX, 0x13);
LDC1000_WriteReg(LDC1000_CMD_RPMIN, 0x3A);
LDC1000_WriteReg(LDC1000_CMD_SENSORFREQ, 0x94);
LDC1000_WriteReg(LDC1000_CMD_LDCCONFIG, 0x17);
LDC1000_WriteReg(LDC1000_CMD_CLKCONFIG, 0x02);
LDC1000_WriteReg(LDC1000_CMD_INTCONFIG, 0x02);
LDC1000_WriteReg(LDC1000_CMD_THRESHILSB, 0x50);
LDC1000_WriteReg(LDC1000_CMD_THRESHIMSB, 0x14);
LDC1000_WriteReg(LDC1000_CMD_THRESLOLSB, 0xC0);
LDC1000_WriteReg(LDC1000_CMD_THRESLOMSB, 0x12);
LDC1000_WriteReg(LDC1000_CMD_PWRCONFIG, 0x01);
}
//讀取距離參數(shù)
unsigned int ReadValue(void)
{
unsigned int iTemp;
iTemp= LDC1000_ReadReg(LDC1000_CMD_PROXMSB);
iTemp《《=8;
iTemp+= LDC1000_ReadReg(LDC1000_CMD_PROXLSB);
return iTemp;
}










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論