 電子發燒友App
電子發燒友App


近幾年來,隨著海洋事業的迅速發展,海洋環保已經提上議事日程。因此,海洋水環境監測成為人們越來越關注的焦點。
無線傳感器網絡所具有的眾多類型的傳感器,可探測包括地震、電磁、溫度、濕度、噪聲、光強度、壓力、土壤成分、移動物體的大小、速度和方向等周邊環境中多種多樣的現象。基于MEMS的微傳感技術和無線聯網技術為無線傳感器網絡賦予了廣闊的應用前景。這些潛在的應用領域可以歸納為:軍事、航空、反恐、防爆、救災、環境、醫療、保健、家居、工業、商業等領域。無線傳感器網絡是一種全新的信息獲取平臺,能夠實時監測和采集網絡分布區域內的各種檢測對象的信息,并將這些信息發送到網關節點,以實現復雜的指定范圍內目標檢測與跟蹤,具有快速展開、抗毀性強等特點,有著廣闊的應用前景。
ZigBee是一種高可靠的無線數傳網絡,類似于CDMA和GSM網絡。ZigBee數傳模塊類似于移動網絡基站。通訊距離從標準的75m到幾百米、幾公里,并且支持無限擴展。ZigBee是一個由可多到65000個無線數傳模塊組成的一個無線數傳網絡平臺,在整個網絡范圍內,每一個ZigBee網絡數傳模塊之間可以相互通信,每個網絡節點間的距離可以從標準的75m無限擴展。與移動通信的CDMA網或GSM網不同的是,ZigBee網絡主要是為工業現場自動化控制數據傳輸而建立,因而,它必須具有簡單,使用方便,工作可靠,價格低的特點。而移動通信網主要是為語音通信而建立,每個基站價值一般都在百萬元人民幣以上,而每個ZigBee“基站”卻不到1000元人民幣。每個ZigBee網絡節點不僅本身可以作為監控對象,例如其所連接的傳感器直接進行數據采集和監控,還可以自動中轉別的網絡節點傳過來的數據資料。除此之外,每一個Zigbee網絡節點(FFD)還可在自己信號覆蓋的范圍內,和多個不承擔網絡信息中轉任務的孤立的子節點(RFD)無線連接。
隨著通信技術的迅速發展,人們提出了在人自身附近幾米范圍之內通信的需求,這樣就出現了個人區域網絡(personal area network, PAN)和無線個人區域網絡(wireless personal area network, WPAN)的概念。WPAN網絡為近距離范圍內的設備建立無線連接,把幾米范圍內的多個設備通過無線方式連接在一起,使它們可以相互通信甚至接入LAN或Internet.1998年3月,IEEE 802.15工作組。這個工作組致力于WPAN網絡的物理層(PHY)和媒體訪問層(MAC)的標準化工作,目標是為在個人操作空間(personal operating space, POS)內相互通信的無線通信設備提供通信標準。POS一般是指用戶附近10米左右的空間范圍,在這個范圍內用戶可以是固定的,也可以是移動的。在IEEE 802.15工作組內有四個任務組(task group, TG),分別制定適合不同應用的標準。這些標準在傳輸速率、功耗和支持的服務等方面存在差異。協議棧結構如圖l所示。

1 傳感網絡的構成
本文設計的無線傳感器網絡的組成包括傳感器節點、匯聚節點和網關節點,主要負責探測海洋區域內的各種情況,包括油污檢測、濁度測量、化學需氧量測量、海藻測量等等。
傳感器節點主要負責網絡的形成,海洋各項參數的采集,并將數據通過多跳的形式傳輸到匯聚節點。
匯聚節點是無線傳感器網絡的中心節點,負責網絡的發起,拓撲的形成與維護,網路數據的匯聚與處理,與監控系統的通信與信息交互。匯聚節點是傳感器節點終端節點中能力較強的一種。
網關節點接收來自其他節點的數據,并對數據進行校正、融合等處理,然后發送給監測中心。對于監測中心所發指令進行相應處理,用來確定各個節點的工作狀態。
后臺監測中心負責對發送回來的海洋參數數據進行匯總與處理,網絡拓撲的控制,網絡的監護等工作。
整個海洋監測系統由一定數量的傳感器網絡終端節點、少量匯聚節點、一個網關節點以及后臺監測系統組成。為了探測一定區域,需要在該區域內布置一定數量的傳感器節點,以達到對整個區域的覆蓋,并且需要一個網關節點完成對來自傳感器終端的數據的融合,上傳給后臺監測系統,完成數據的分析與處理。從網關節點到監控中心距離一般都比較遠,可采用現有的GPRS網絡進行遠程數據傳輸。GPRS網絡連接費用相對低廉,傳輸速率較高,性價比較高,而且能夠永遠在線。傳感網絡結構示意圖如圖2所示。

傳感器終端節點與匯聚節點能夠自動形成一個自組織、多跳的網絡。傳感器終端節點按指令采集數據,并將數據及時地通過自適應的路由、多跳中繼后傳輸給網關節點,網關節點將匯集的數據打包后,轉發給后臺監控系統。
2 硬件設計
本海洋監測系統中的傳感器節點是傳感網絡中最重要的部分,其硬件包括微處理器單元、一個zigbee通信模塊及電源管理模塊;匯聚節點硬件包括微處理器單元、兩個Zigbee通信模塊及電源管理模塊;網關節點硬件包括微處理器單元、一個Zigbee通信模塊、一個GPRS模塊及電源管理模塊。
2.1 節點微處理器MSP430F149單片機
由于無線傳感器網絡節點需要將傳感器輸出的模擬信號轉換為數字信號,可選擇一款集成有AD轉換功能的微控制器。另外,無線傳感器網絡節點除完成數據采集功能外,還要完成數據轉發和路由功能,因而要有足夠的處理能力、程序空間及數據空間。本設計MCU采用的是MSP-430F149單片機,它是TI公司生產的一種16位超低功耗混合信號處理器,稱之為混合信號處理器,主要是由于其針對實際應用需求,把許多模擬電路、數字電路和微處理器集成在一個芯片上,以提供“單片”解決方案。其突出優點是低電源電壓、超低功耗。由于為FLASH型,所以可以在線對單片機進行調試和下載程序。
MSP430F149低頻輔助時鐘采用32kHz時鐘晶振直接驅動,可作為后臺實時時鐘實現自喚醒功能。集成的高速數字控制振蕩器(DCO)頻率為8MHz,可作為CPU的主系統時鐘(MSLK)源,也可以作為CPU的子系統時鐘(SMCLK)源。
2.2 節點Zigbee通信模塊CC2420
本系統中無線傳感器網絡硬件中的Zigbee通信模塊采用低功耗高性能的無線網絡模塊CC2420來實現,它工作在全球通用的2.4GHz頻段。CC2420是一款符合IEEE802.15.4標準的射頻收發器,性能穩定且功耗極低。CC2420的選擇性和靈敏度指數超過IEEE802.15.4標準的要求,可確保短距離通信的有效性和可靠性,利用此芯片開發的無線通信設備支持數傳速率高達250kb/s,可實現多點對多點的快速組網。 CC2420發送數據時,使用直接正交上變頻。基帶信號的同相分量和正交分量直接被DAC轉換為模擬信號,通過低頻濾波器,直接變頻到設定的信道上,再由天線發射出去。
Zigbee通信模塊CC2420與單片機的連接電路,如圖3所示。

CC2420只需要極少的外圍電路,包括時鐘電路、射頻I/O匹配電路和微控制器接口電路三部分。芯片本振信號既可由外部有源晶體提供,也可以由內部電路提供。由內部電路提供時需要外加晶體振蕩器和兩個負載電容,電容的大小取決于晶體的頻率及輸入容抗等參數。例如當采用16MHz晶振時,其電容約為22pF.射頻I/O匹配電路主要用來匹配芯片的輸入/輸出阻抗。CC2420與微處理器的連接非常方便,它使用SFD、FIFO、FIFOP、和CCA四個引腳表示收發數據的狀態;微處理器通過SPI接口與CC2420交換數據、發送命令等。
CC2420收到物理幀的SFD字段后,會在SFD引腳輸出高電平,直到接收完該幀。如果啟動了地址辨識,在地址辨識失敗后,SFD引腳立即轉為輸出低電平。FIFO和FIFOP引腳表示接收FIFO的緩存區狀態,如果接收FIFO緩存區有數據,FIFO引腳輸出高電平;當接收FIFO緩存區為空,FIFO引腳輸出低電平;當FIFO引腳在接收FIFO緩存區的數據超過某個臨界值時,或在CC2420接收到一個完整的幀以后輸出高電平臨界值時,可以通過CC2420的寄存器設置。CCA引腳在信道上有信號時輸出高電平,它只在接收狀態下有效,在CC2420進入接收狀態至少8個符號周期后,才會在CCA引腳上輸出有效的信道狀態信息。
SPI接口由CSn、SI、SO和SCLK引腳組成,微處理器通過SPI接口訪問CC2420內部寄存器和存儲器。在訪問過程中,CC2420是SPI接口的從設備,接收來自微處理器的時鐘信號和片選信號并在微處理器的控制下執行輸入/輸出操作。SPI接口接收或者發送數據時,都與時鐘下降沿對齊,CC2420與MSP430F149是通過SPI連接的,其中MSP430F149處于主模式,CC2420處于從模式。MSP430F149還有4個I/O口與CC2420相連,主要起查詢CC2420狀態的作用。
電源管理模塊為傳感器單元、處理器單元、無線通信模塊提供能源,并對電源進行管理,以提高能量的利用率。
2.3 系統IEEE802.15.4工作模式
IEEE802.15.4規范中規定使用DSSS調制方式,CC2420中的調制和擴頻功能框圖如圖4所示。

每個字節分為兩組符號,4位一組,低位符號首先傳送,對于多字節域,則是低位字節首先傳送,但是,與安全有關的域先傳送高位字節。每個符號映射為一個超過16位的偽隨機序列,即32位片碼序列。片碼序列以2Mchip/s的速率傳送,對于每個符號,首先傳送低位片碼。
調制方式為偏移正交相移鍵控,具有半個正弦的形狀,相當于最小頻移鍵控(MFSK)調制,每片的形狀通過半個正弦波交替在同相和正交相位信道傳送。
2.4 數據通信幀格式設置
同步頭包括前導序列和開始幀分隔符,在CC2420中前導序列長度和開始幀分隔符是能設置的,默認值4字節和1字節,是符合IEEE.80 2.15.4協議的;物理頭位為1字節,幀控制和序列號分別為2字節和1字節:地址和源地址共6字節,待發數據段長度為幀長度減去地址和幀校驗序列。當MODEMCTRL0.AUTOCRC控制位置位時,這個幀校驗序列自動產生2字節,并由CC2420硬件自動插入。
3 軟件設計
本設計中,無線傳感器網絡是一個多路的自組織無線網絡,可以實現自動組網,自動路由查詢,自動數據采集與傳輸,軟件設計上必須能夠實現多跳自組織的功能。另外,傳感器節點必須要求極低的功耗,而低功耗除了硬件設計上的低功耗外,更重要的是軟件設計的低功耗。
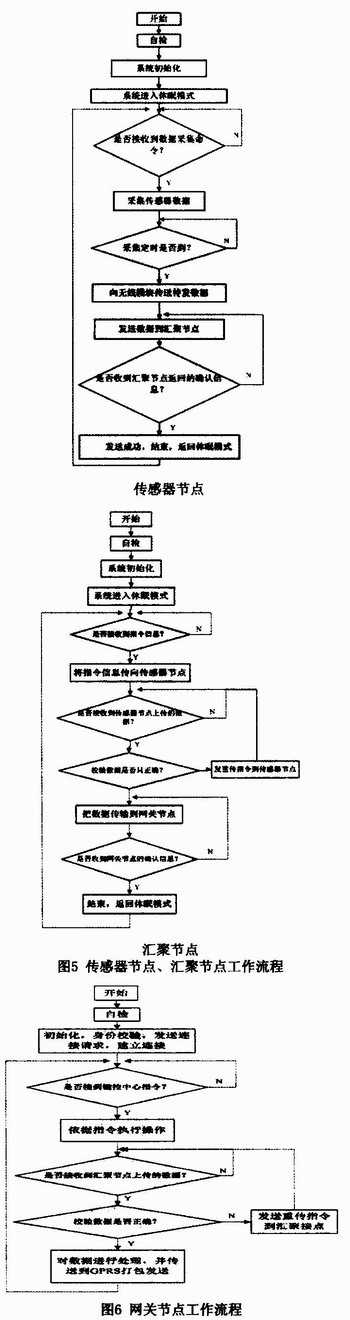
此無線傳感器網絡終端在開機后首先進行自檢,如果自檢失敗了,則進行硬件故障提示,而且自動關機。在自檢通過后,進一步判斷工作模式。傳感器節點在自檢通過后進入接入狀態,如果接入失敗則進入等待狀態。處于等待狀態的節點關閉射頻收發器以節省功耗,當等待定時器溢出時,節點再次回到接入狀態進行新的介入嘗試。如果節點接入成功便轉入業務狀態。處于業務狀態的節點,完成數據的采集與傳輸,對近節點數據的中繼轉發,新節點入網的介入確認等操作。節點為了實現低功耗,必須在業務狀態(活動狀態)與休眠狀態之間輪換。
軟件開發以IAR Embedded Workbench V2.10為平臺,采用C語言編寫。節點的MSP430系列單片機支持C語言程序設計。適用于MSP430系列的C語言與標準C語言兼容程度高,大大提高了軟件開發的工作效率,增強了程序代碼的可靠性、可讀性和可移植性。軟件編程的基本思想是:先對SPI、CC2420控制端口初始化,使能SPI、UART端口,使能ADC,開機后,就可以運行任務程序,實現接收或發送數據及命令了。
傳感器節點、匯聚節點的工作流程如圖5所示。

對于網關節點的設計,接收數據部分仍采用CC2420無線收發模塊,可以采用統一的傳輸協議,保證傳輸的可靠性;由于還要進行數據的處理,網關節點就不附加傳感器了,以便提高處理器對數據的處理能力,MCU統一采用MSP430F149單片機;同時,監控中心一般遠離監測點,需要采用GPRS模塊來實現數據的遠程傳輸。其工作流程如圖6所示。
4 結論
本文設計的有關海洋水環境監測的無線傳感器網絡綜合運用了無線傳感技術、嵌入式計算技術、現代網絡技術、無線通信技術和分布式智能信息處理技術,將功能相同或不同的無線智能傳感器構成網絡化、智能化的傳感網絡,大大提高了監測海洋各項參數的傳感器的監測能力。這樣的基于無線傳感器網絡的實時監控系統采用中短距離、低功耗無線網絡,射頻傳輸成本低;可根據需要采用多種供電模式,節能效果好;可實現靈活的快速組網和自動配置,擴展性好。

















 工商網監
工商網監
評論