當(dāng)MEMS慣性測(cè)量單元(IMU)用作 運(yùn)動(dòng)控制系統(tǒng)中的反饋傳感器時(shí), 你, 必須了解陀螺儀的噪聲情況 , 因?yàn)椋鼤?huì)在所監(jiān)視的平臺(tái)上造成 不必要的物理運(yùn)動(dòng)。 根據(jù)具體情況,針對(duì)特定MEMS IMU
2017-10-23 10:57:49 12412
12412 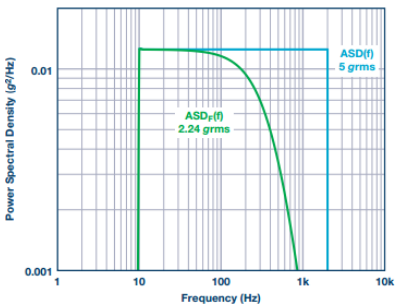
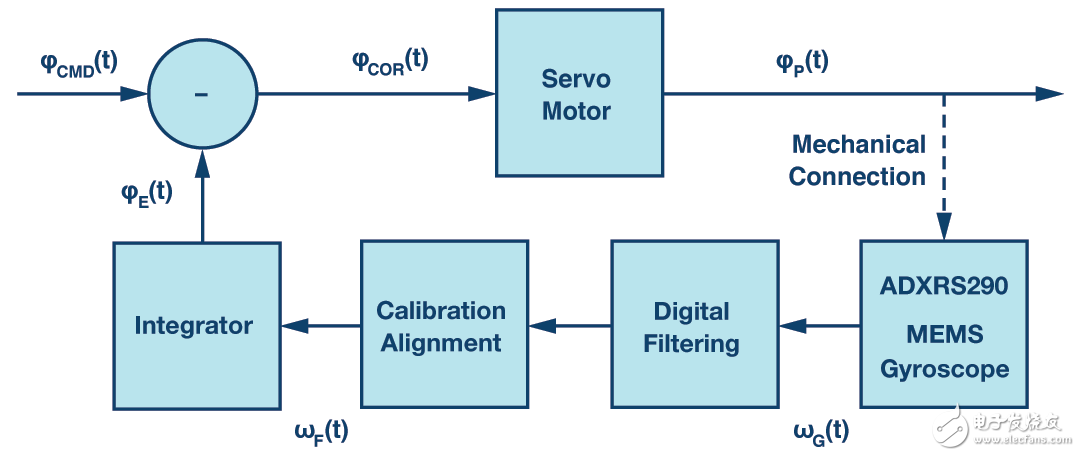
兩個(gè)重要步驟:測(cè)定對(duì)準(zhǔn)誤差項(xiàng)(IMU安裝之后)和制定一個(gè)校正對(duì)準(zhǔn)矩陣。將該矩陣應(yīng)用于陀螺儀陣列時(shí),陀螺儀將像已與全局坐標(biāo)系對(duì)準(zhǔn)一樣作出響應(yīng)。公式14為此過(guò)程提供了一個(gè)系統(tǒng)模型,其中繞全局坐標(biāo)系各軸的旋轉(zhuǎn)
2018-10-17 10:39:42
兩個(gè)重要步驟:測(cè)定對(duì)準(zhǔn)誤差項(xiàng)(IMU安裝之后)和制定一個(gè)校正對(duì)準(zhǔn)矩陣。將該矩陣應(yīng)用于陀螺儀陣列時(shí),陀螺儀將像已與全局坐標(biāo)系對(duì)準(zhǔn)一樣作出響應(yīng)。公式14為此過(guò)程提供了一個(gè)系統(tǒng)模型,其中繞全局坐標(biāo)系各軸的旋轉(zhuǎn)
2019-10-16 08:00:00
,針對(duì)特定MEMS IMU進(jìn)行早期應(yīng)用目標(biāo)噪聲估算時(shí)需要考慮多個(gè)潛在的誤差源。在此過(guò)程中需要考慮的三個(gè)常見陀螺儀特性為其固有噪聲、線性振動(dòng)響應(yīng)和對(duì)準(zhǔn)誤差。圖1的簡(jiǎn)單模型顯示了會(huì)影響各誤差源評(píng)估的幾個(gè)特性
2018-10-22 16:44:26
,針對(duì)特定MEMS IMU進(jìn)行早期應(yīng)用目標(biāo)噪聲估算時(shí)需要考慮多個(gè)潛在的誤差源。在此過(guò)程中需要考慮的三個(gè)常見陀螺儀特性為其固有噪聲、線性振動(dòng)響應(yīng)和對(duì)準(zhǔn)誤差。圖1的簡(jiǎn)單模型顯示了會(huì)影響各誤差源評(píng)估的幾個(gè)特性
2018-11-01 11:15:18
MEMS陀螺儀介紹
2019-08-28 13:00:59
MEMS陀螺儀介紹
2020-05-14 09:31:29
本帖最后由 eehome 于 2013-1-5 09:52 編輯
MEMS陀螺儀的原理與應(yīng)用優(yōu)勢(shì)分析
2012-08-14 22:49:36
MEMS陀螺儀的簡(jiǎn)單校準(zhǔn)
2016-08-17 11:53:03
發(fā)生。這些程序校準(zhǔn)磁力計(jì)、雙天線安裝對(duì)準(zhǔn)誤差、IMU安裝對(duì)準(zhǔn)誤差,還校準(zhǔn)車輛振動(dòng)水平以便進(jìn)行靜態(tài)期檢測(cè)。該系統(tǒng)可在兩種硬件配置中工作。第一種配置包括兩個(gè)FOG(檢測(cè)航向和俯仰角)、一個(gè)MEMS陀螺儀
2018-10-18 10:55:34
用那種型號(hào)的單片機(jī)和mems陀螺儀配合使用?謝謝大神指導(dǎo)我這位小學(xué)生
2017-03-21 20:05:49
1000g 的沖擊。4. 測(cè)量范圍大 MEMS是否取代光纖陀螺儀技術(shù)光纖陀螺是繼激光陀螺巨大的進(jìn)步,屬于兩光陀螺,利用Sagnac效應(yīng),用光程差反算角速度,相比激光陀螺,體積小,成本低,精度可達(dá)千分之一
2018-10-23 10:57:15
請(qǐng)問(wèn)各位大神,如何用公式節(jié)點(diǎn)讀取陀螺儀數(shù)據(jù),陀螺儀型號(hào)是6050,謝謝!!!
2017-08-26 10:08:21
維護(hù)方位和角速度的設(shè)備。它是一個(gè)旋轉(zhuǎn)的輪子或圓盤,其中旋轉(zhuǎn)軸可以不受影響的設(shè)定在任何方向。當(dāng)旋轉(zhuǎn)發(fā)生時(shí),根據(jù)角動(dòng)量守恒定律,該軸的方向不受支架傾斜或旋轉(zhuǎn)的影響。2.MPU6050三位角度加速度陀螺儀??MPU6050是一個(gè)6軸運(yùn)動(dòng)處理傳感器。它集成了3軸MEMS陀螺儀,3軸MEMS加速度計(jì),以及一個(gè)可擴(kuò)
2022-02-10 06:35:58
陀螺儀的原理 以及怎么調(diào) 急求急求啊{:10:}{:10:}{:10:}{:10:}{:10:}{:10:}
2013-07-22 10:10:02
幫忙設(shè)計(jì)個(gè)陀螺儀控制的mp3,能控制暫停和開始。
2012-11-29 21:28:36
陀螺儀是什么來(lái)的?他有什么作用?在全國(guó)電設(shè)競(jìng)賽中有什么例子嗎?求各位大伙幫幫忙解釋!十分感謝!
2017-07-30 17:06:12
ADXRS646對(duì)隨機(jī)振動(dòng)(15 g rms, 0.11 g2/Hz)的g敏感度響應(yīng),1600 Hz濾波另一個(gè)困難是將補(bǔ)償加速度計(jì)和陀螺儀的相位響應(yīng)相匹配。如果陀螺儀和補(bǔ)償加速度計(jì)的相位響應(yīng)匹配不佳,高頻
2018-10-18 11:34:58
`這陀螺儀和重力傳感器有什么區(qū)別呢?區(qū)別很多,但最大的區(qū)別就是重力傳感對(duì)于空間上的位移感受維較少,能做到6個(gè)方向的感應(yīng)就已經(jīng)很不錯(cuò)了,而陀螺儀則是全方位的。這很重要,毫不夸張的說(shuō),這兩者不是一個(gè)級(jí)別
2020-09-03 07:29:47
,它的旋轉(zhuǎn)軸永遠(yuǎn)指向一固定方向,因此傅科用希臘字 gyro(旋轉(zhuǎn))和skopein(看)兩字合為“gyro scopei ”一字來(lái)命名該儀器儀表。 最早的陀螺儀的簡(jiǎn)易制作方式如下:即將一個(gè)高速旋轉(zhuǎn)
2020-12-17 16:31:35
。 最早的陀螺儀的簡(jiǎn)易制作方式如下:即將一個(gè)高速旋轉(zhuǎn)的陀螺放到一個(gè)萬(wàn)向支架上,靠陀螺的方向來(lái)計(jì)算角速度,簡(jiǎn)易圖如下圖所示。 其中,中間金色的轉(zhuǎn)子即為陀螺,它因?yàn)閼T性作用是不會(huì)受到影響的,周邊的三個(gè)
2020-09-09 08:48:00
最近聽大牛的傳感器同事的陀螺儀專業(yè)講座,深入淺出的講解讓小編對(duì)陀螺儀的原理與應(yīng)用有種頓悟趕腳,抽空整理部分內(nèi)容,給對(duì)這個(gè)技術(shù)不太明了的小伙伴們科普下哦~陀螺儀是用來(lái)測(cè)量角速率的器件,在加速度功能基礎(chǔ)上,可以進(jìn)一步發(fā)展,構(gòu)建陀螺儀。
2019-07-25 06:15:32
`陀螺儀在航天航空中的應(yīng)用 陀螺儀器最早是用于航海導(dǎo)航,但隨著科學(xué)技術(shù)的發(fā)展,它在航空和航天事業(yè)中也得到廣泛的應(yīng)用。 陀螺儀器不僅可以作為指示儀表,而更重要的是它可以作為自動(dòng)控制系統(tǒng)中的一個(gè)敏感
2020-09-04 07:52:53
的特性,看完大家就能完全理解陀螺儀了。 1.現(xiàn)在智能手機(jī)上采用的陀螺儀是MEMS(微機(jī)電)陀螺儀,手機(jī)中陀螺儀的運(yùn)用首先用在游戲的控制上,相比傳統(tǒng)重力感應(yīng)器只能感應(yīng)左右兩個(gè)維度的(多軸的重力感應(yīng)是可以
2018-11-08 16:14:38
對(duì)于角速度傳感器,很多人可能會(huì)比較陌生,不過(guò),如果說(shuō)起陀螺儀,大家還是比較熟悉的。陀螺儀,是一種用來(lái)測(cè)量角速度的裝置。根據(jù)不同的工作原理,陀螺儀有哪些類型呢?
2019-09-12 09:05:05
執(zhí)行校準(zhǔn)和溫度補(bǔ)償?shù)姆椒ā?資料四:MEMS陀螺儀的沖擊和振動(dòng)抑制性能 http://v.youku.com/v_show/id_XMzU2MTIxMjUy.html 資料五:陀螺儀機(jī)械性能:最重要
2016-01-18 15:31:32
,發(fā)現(xiàn)陀螺儀應(yīng)有高、低兩個(gè)寄存器,應(yīng)該可以實(shí)現(xiàn)較高精度的輸出。怎么實(shí)現(xiàn)使用兩個(gè)寄存器?
以上怎么通過(guò)編程進(jìn)行實(shí)現(xiàn)呢?
2023-12-28 08:18:21
` 本帖最后由 zwt_cn 于 2017-10-25 09:33 編輯
大家好!群里可有用過(guò)ADXRS453陀螺儀的大俠?遇到問(wèn)題請(qǐng)教:這是檢測(cè)的兩個(gè)角度的比較,紅的是實(shí)際角度,綠色是陀螺儀測(cè)試到的角度明顯兩個(gè)測(cè)量的角速度誤差就是蠻大的所以到后來(lái)越積越多 `
2017-10-25 09:28:47
陀螺儀開啟的時(shí)候會(huì)有偶發(fā)機(jī)器靜止的時(shí)候一抖動(dòng)不停。我們這邊做過(guò)實(shí)驗(yàn),將一臺(tái)重沒(méi)出現(xiàn)這個(gè)問(wèn)題的機(jī)器和一臺(tái)出現(xiàn)過(guò)這種問(wèn)題機(jī)器對(duì)調(diào)陀螺儀。問(wèn)題點(diǎn)是跟著陀螺儀走。主控是用的HI3559V200海思有大佬能解決問(wèn)題嗎, 有償
2022-09-22 16:31:03
MPU-6050模塊三軸加速度+三軸陀螺儀簡(jiǎn)介模塊引腳說(shuō)明名稱接線簡(jiǎn)介MPU-6050集成了3軸MEMS陀螺儀,3軸MEMS加速度計(jì),以及一個(gè)可擴(kuò)展的數(shù)字運(yùn)動(dòng)處理器DMP,可用IIC接口連接一個(gè)
2022-02-10 07:17:39
超聲清潔設(shè)備(典型工作頻率大約30kHz)損壞傳感器。 作為廠商首選的MEMS一站式供應(yīng)商,意法半導(dǎo)體擁有豐富的產(chǎn)品組合,包括微機(jī)電加速度計(jì)、陀螺儀、壓力傳感器、磁力計(jì)和麥克風(fēng),能在一個(gè)多傳感器模塊
2018-11-13 16:03:14
首先,我向大家問(wèn)好!對(duì)不起我的英語(yǔ),這不是我的母語(yǔ)。 我想知道為什么如果STm現(xiàn)在有完整的3軸數(shù)字解決方案(L3G4200D),iNEMO v2會(huì)使用兩個(gè)ANALOG陀螺儀?為什么它不使用,模擬
2018-11-02 10:29:57
和陀螺儀。## 加速度傳感器加速度傳感器,有些人也叫它加速度計(jì),你只要記住其實(shí)是一個(gè)東西兩個(gè)名字而已。加速度傳感器,顧名思義,用于測(cè)量由地球引力作用或者物體運(yùn)動(dòng)所產(chǎn)生的加速度。如果你在高中時(shí)期沒(méi)有只顧
2016-02-29 09:39:18
陀螺儀,是一種用來(lái)感測(cè)與維持方向的裝置,基於角動(dòng)量不滅的理論設(shè)計(jì)出來(lái)的。陀螺儀主要是由一個(gè)位於軸心可以旋轉(zhuǎn)的輪子構(gòu)成。 陀螺儀一旦開始旋轉(zhuǎn),由於輪子的角動(dòng)量,陀螺儀有抗拒方向改變的趨向。陀螺儀
2018-11-08 16:12:15
是世界上第一款集成 6 軸MotionTracking設(shè)備。它集成了3軸MEMS陀螺儀,3軸MEMS加速度計(jì),以及一個(gè)可擴(kuò)展的數(shù)字運(yùn)動(dòng)處理器 DMP( DigitalMotion Proce...
2022-02-10 07:24:32
本帖翻譯自IMU(加速度計(jì)和陀螺儀設(shè)備)在嵌入式應(yīng)用中使用的指南。這篇文章主要介紹加速度計(jì)和陀螺儀的數(shù)學(xué)模型和基本算法,以及如何融合這兩者,側(cè)重算法、思想的討論介紹本指南旨在向興趣者介紹慣性MEMS(微機(jī)電系統(tǒng))傳感器,特別是加速度計(jì)和陀螺儀以及其他整合IMU(慣性測(cè)量
2021-08-09 06:46:21
,同時(shí)還提高了產(chǎn)品的總體性能。 陀螺儀技術(shù)的局限性 所有商用MEMS陀螺儀的基本原理均相同,即在旋轉(zhuǎn)狀態(tài)下同一結(jié)構(gòu)的兩個(gè)振動(dòng)模態(tài)之間因科里奧利力發(fā)生的能量轉(zhuǎn)移。指定旋轉(zhuǎn)產(chǎn)生絕對(duì)加速度的基本運(yùn)動(dòng)學(xué)關(guān)系用于
2018-11-12 15:35:11
本帖最后由 餅干11 于 2021-8-11 09:44 編輯
我想在一個(gè)比較大的平臺(tái),分別安裝陀螺儀實(shí)現(xiàn)這個(gè)平臺(tái)穩(wěn)定,平臺(tái)是三個(gè)吊輪吊著的,如何讓陀螺儀判斷哪個(gè)吊輪快了或者慢了,然后給單片機(jī)指令去控制吊輪,但是平臺(tái)太大了會(huì)不會(huì)導(dǎo)致陀螺儀不靈敏,比如人在地球上感覺不到地球自轉(zhuǎn)一樣。
2021-08-11 08:32:28
。目前,最為常見的光纖陀螺儀是相敏光纖陀螺儀,通過(guò)測(cè)量在一個(gè)光纖線圈中的兩束反向傳播光束的相移以敏感載體轉(zhuǎn)動(dòng),從而計(jì)算出其角速率。因此,光纖陀螺儀的精度主要取決于其采用的光纖種類和光電檢測(cè)系統(tǒng),偏值
2018-11-09 16:05:25
很多好處,例如能夠建立針對(duì)反饋檢測(cè)元件的相關(guān)要求,或反過(guò)來(lái)分析對(duì)某個(gè)特定陀螺儀中噪聲的系統(tǒng)級(jí)響應(yīng)。一旦系統(tǒng)設(shè)計(jì)師深入理解了這個(gè)關(guān)系,他們就能重點(diǎn)掌握影響角速度反饋環(huán)路中噪聲行為的兩個(gè)關(guān)鍵領(lǐng)域:(1)為
2017-08-12 15:38:23
成為現(xiàn)象級(jí)熱門產(chǎn)品。而在無(wú)人飛行器的飛機(jī)姿態(tài)控制這一重要應(yīng)用上,以MEMS加速度傳感器、MEMS陀螺儀為主的傳感類硬件的應(yīng)用可謂是大放異彩.
2020-05-18 07:52:16
能夠確定反饋檢測(cè)元件的相關(guān)要求,或者相反,分析系統(tǒng)對(duì)特定陀螺儀中噪聲的響應(yīng)。一旦系統(tǒng)設(shè)計(jì)者充分了 解這種關(guān)系,它們便能從兩個(gè)重要方面來(lái)掌控角速率反饋環(huán)路中的噪聲影響:1. 制定最合適的MEMS陀螺儀選擇
2018-10-18 11:22:22
基于MEMS的加速度計(jì)設(shè)備是如何工作的?基于MEMS的陀螺儀設(shè)備是如何工作的?
2021-11-12 06:59:40
很多人可能都還不知道手機(jī)上陀螺儀的作用,甚至是手機(jī)上還有個(gè)叫陀螺儀的玩意兒。陀螺儀其實(shí)通常被叫做角速度傳感器,是通過(guò)測(cè)量物理量的偏轉(zhuǎn)與傾斜的轉(zhuǎn)動(dòng)角速度來(lái)進(jìn)行判定的。通過(guò)高速回轉(zhuǎn)體的動(dòng)量矩敏感殼體相對(duì)
2018-11-07 09:53:37
MEMS陀螺儀信號(hào)中的常見噪聲源評(píng)估MEMS陀螺儀信號(hào)中常見噪聲源的簡(jiǎn)單流程
2021-03-08 06:17:12
什么影響了運(yùn)動(dòng)控制系統(tǒng)的關(guān)鍵性能標(biāo)準(zhǔn)?采用MEMS陀螺儀的低噪聲反饋控制設(shè)計(jì)
2021-03-11 07:01:52
。陀螺儀傳感器原本是運(yùn)用到直升機(jī)模型上的,已經(jīng)被廣泛運(yùn)用于手機(jī)這類移動(dòng)便攜設(shè)備上(IPHONE的三軸陀螺儀技術(shù))。 光纖陀螺儀。光纖陀螺儀是以光導(dǎo)纖維線圈為基礎(chǔ)的敏感元件,由激光二極管發(fā)射出的光線朝兩個(gè)方向
2020-09-06 07:49:27
陀螺儀(角速率傳感器或角速度傳感器)是一種可以測(cè)量到物體角速度的裝置。陀螺儀可以感知旋轉(zhuǎn)運(yùn)動(dòng)和方向的變化。角速度不同,運(yùn)動(dòng)產(chǎn)生的電位差也不同。陀螺儀將角速度的變化轉(zhuǎn)換成電信號(hào)輸出。
2020-08-19 06:15:05
,但鼠標(biāo)中還有另一個(gè)同樣吸引人的器件,那就是Gyraon公司生產(chǎn)的MG1104陀螺儀模塊。 MG1104與我期望在今天的硅MEMS加速計(jì)時(shí)代看到的傳感器有很大的差別,它的個(gè)頭特別大。其尺寸接近大塊
2018-12-05 15:25:46
Harvey Weinberg(ADI MEMS感測(cè)器技術(shù)部門應(yīng)用工程事業(yè)群主管) 長(zhǎng)久以來(lái)偏壓穩(wěn)定度被視為維持陀螺儀穩(wěn)定度的重要指標(biāo),但在大多數(shù)的實(shí)際應(yīng)用中,振動(dòng)敏感度往往也是另個(gè)重要關(guān)鍵。因此
2018-10-18 11:21:33
尊敬的發(fā)騷友,我是一名學(xué)生,我們學(xué)校要參加今年的亞太機(jī)器人大賽國(guó)內(nèi)選拔賽。往年我們都是采用巡線的方式定位,今年我們打算用陀螺儀,但關(guān)于陀螺儀方面的資料太少了,而且不全面。不知哪位好心的發(fā)騷友,有這方面
2012-11-14 10:36:59
各位同行們,本人對(duì)陀螺儀研究不深,可否有做過(guò)些方面的同行發(fā)點(diǎn)陀螺儀的程序資料參考參考,最好針對(duì)MPU6050,謝謝。 894803216@qq.com
2014-09-02 19:03:27
MEMS陀螺儀是如何工作的?
2021-03-18 06:48:50
陀螺儀檢測(cè)有和缺陷?
2021-10-12 12:55:23
型號(hào)為ADXRS624 的MEMS 陀螺儀其量程能否改為10°/s.
2018-08-10 06:53:41
速率輸入。軸由扭矩電機(jī)驅(qū)動(dòng),可確保提高位置和速度精度。高多站點(diǎn)MEMS接觸單元:并行測(cè)試高大140個(gè)器件陀螺儀測(cè)試:素等(梯形剖面,可編程的速度、正弦和合并正弦剖
2022-09-26 16:52:21
MEMS單軸陀螺儀芯片利用作用在旋轉(zhuǎn)物體上的科里奧利力。高Q值和相對(duì)靈敏度的壓電單晶通過(guò)采用,雖然體積小,但在振動(dòng)型中實(shí)現(xiàn)了最高的輸入/輸出靈敏度比。
2022-11-21 13:24:32
ST mems陀螺儀
基于ST專有的MEMS技術(shù)的優(yōu)勢(shì)和世界
2008-09-23 10:41:202137 中國(guó)自己的MEMS陀螺儀誕生
深迪半導(dǎo)體,日前發(fā)布了旗下第一款陀螺儀產(chǎn)品-- SSZ030CG,這標(biāo)志著第一款具有中國(guó)自主知識(shí)產(chǎn)權(quán)的商用 MEMS (微機(jī)電)陀螺儀誕生。
2009-12-07 09:05:401337 陀螺儀能夠測(cè)量沿一個(gè)軸或幾個(gè)軸運(yùn)動(dòng)的角速度,而MEMS加速計(jì)則能測(cè)量線性加速度,因此這兩者是一對(duì)理想的互補(bǔ)技術(shù)。事實(shí)上,如果組合使用加速計(jì)和陀螺儀這兩種傳感器
2010-12-16 09:03:131080 本內(nèi)容介紹了MEMS加速度計(jì)和陀螺儀的相位與頻率響應(yīng),希望對(duì)大家有所幫助
2011-11-25 00:10:00 189
189 深迪半導(dǎo)體(上海)有限公司正式發(fā)布其首款三軸微機(jī)電(MEMS)陀螺儀產(chǎn)品,ST200G
2012-06-06 18:07:441447 計(jì)算機(jī)上的上位機(jī)制作工具語(yǔ)言之MEMS陀螺儀噪聲源的預(yù)測(cè)和管理
2016-09-01 14:55:490 陀螺儀是一種能夠精確地確定運(yùn)動(dòng)物體方位的儀器,它是現(xiàn)代航空、航海、航天和國(guó)防工業(yè)中廣泛使用的一種慣性導(dǎo)航儀器,它的發(fā)展對(duì)一個(gè)國(guó)家的工業(yè),國(guó)防和其他高科技的發(fā)展具有十分重要的戰(zhàn)略意義。 近年來(lái)隨著
2017-10-24 10:07:544 近年來(lái)隨著MEMS(微機(jī)電系統(tǒng))技術(shù)的發(fā)展,MEMS陀螺儀的研究與發(fā)展受到了廣泛的重視。MEMS陀螺儀具有體積少、重量輕、可靠性好、易于系統(tǒng)集成等優(yōu)點(diǎn),應(yīng)用范圍廣闊。但是目前MEMS陀螺儀的精度還不
2017-10-26 15:27:059 三軸陀螺儀也叫“微機(jī)械陀螺儀”,而“微機(jī)械陀螺儀”也可稱作“MEMS陀螺儀”,即同時(shí)測(cè)定6個(gè)方向的位置,移動(dòng)軌跡,加速。
2017-12-01 16:17:2314565 
MEMS陀螺儀對(duì)微機(jī)械加工工藝具有高度的敏感性,加工工藝偏差、加工應(yīng)力以及可靠性等對(duì)MEMS陀螺儀的成品率至關(guān)重要。整個(gè)微機(jī)械加工工藝流程是實(shí)現(xiàn)MEMS陀螺儀長(zhǎng)期穩(wěn)定工作的基礎(chǔ),因此必須加強(qiáng)微機(jī)械加工工藝過(guò)程的控制。
2018-07-17 08:28:001471 MEMS陀螺儀對(duì)微機(jī)械加工工藝具有高度的敏感性,加工工藝偏差、加工應(yīng)力以及可靠性等對(duì)MEMS陀螺儀的成品率至關(guān)重要。整個(gè)微機(jī)械加工工藝流程是實(shí)現(xiàn)MEMS陀螺儀長(zhǎng)期穩(wěn)定工作的基礎(chǔ),因此必須加強(qiáng)微機(jī)械加工工藝過(guò)程的控制。
2018-06-13 15:14:001608 光纖陀螺儀(FOG)以前曾經(jīng)是環(huán)形激光陀螺儀(RLG)等其他技術(shù)的低成本替代品,現(xiàn)在該技術(shù)面臨著新的競(jìng)爭(zhēng)。微機(jī)電系統(tǒng)(MEMS)陀螺儀開始搶奪傳統(tǒng)FOG應(yīng)用的市場(chǎng)份額。具體來(lái)說(shuō),天線陣列穩(wěn)定、農(nóng)業(yè)機(jī)械控制、常規(guī)車輛導(dǎo)航成為MEMS和FOG對(duì)峙的戰(zhàn)場(chǎng)。
2018-02-24 17:24:278462 
本視頻是ADI公司MEMS陀螺儀和同類陀螺儀產(chǎn)品的對(duì)比演示,比較兩者對(duì)錯(cuò)誤輸出激勵(lì)的響應(yīng)。可以看出,我們的結(jié)果新款陀螺儀具有高抗振動(dòng)、抗沖擊性和抗線性加速度特性。
2018-06-03 01:47:003404 MEMS陀螺儀也稱電子式陀螺儀,就是一塊芯片。 Iphone 4上的陀螺儀就是這種,主要作用是在GPS沒(méi)有信號(hào)時(shí),通過(guò)陀螺儀的作用仍然能夠繼續(xù)精確導(dǎo)航。
2018-07-30 11:21:3512905 MEMS 陀螺儀的基本工作原理是通過(guò)科里奧利力來(lái)實(shí)現(xiàn)的,演示文稿中利用生動(dòng)的動(dòng)畫講述了這一原理,并介紹了為什么工業(yè)級(jí)的陀螺儀要采用差分甚至是四核的設(shè)計(jì)結(jié)構(gòu)。當(dāng)然,MEMS 陀螺儀的設(shè)計(jì)架構(gòu)中還用到了MEMS加速度計(jì)的基本設(shè)計(jì)單元。
2019-07-31 06:18:004029 本陀螺儀演示視頻介紹2個(gè)ADI MEMS陀螺儀(ADXRS800、ADXRS450)和2個(gè)同類陀螺儀產(chǎn)品。可以看到每個(gè)陀螺儀對(duì)施加的旋轉(zhuǎn)速率所做出的響應(yīng)。同時(shí)還展示了ADI公司陀螺儀出色的沖擊和振動(dòng)抑制性能。
2019-07-16 06:15:002584 本視頻是ADI公司MEMS陀螺儀和同類陀螺儀產(chǎn)品的對(duì)比演示,比較兩者對(duì)錯(cuò)誤輸出激勵(lì)的響應(yīng)。可以看出,我們的結(jié)果新款陀螺儀具有高抗振動(dòng)、抗沖擊性和抗線性加速度特性。
2019-07-16 06:12:002668 體有徑向速度Vr,那么將會(huì)產(chǎn)生切向科里奧利加速度。 MEMS加速度計(jì)在較長(zhǎng)時(shí)間的測(cè)量值是正確的,而在較短時(shí)間內(nèi)由于信號(hào)噪聲的存在,而有誤差。陀螺儀在較短時(shí)間內(nèi)則比較準(zhǔn)確而較長(zhǎng)時(shí)間則會(huì)有與漂移而存有誤差。因此,需要兩者(相互調(diào)整)來(lái)確保航向的正確。 現(xiàn)在一般
2020-04-16 15:10:422253 體有徑向速度Vr,那么將會(huì)產(chǎn)生切向科里奧利加速度。 MEMS加速度計(jì)在較長(zhǎng)時(shí)間的測(cè)量值是正確的,而在較短時(shí)間內(nèi)由于信號(hào)噪聲的存在,而有誤差。陀螺儀在較短時(shí)間內(nèi)則比較準(zhǔn)確而較長(zhǎng)時(shí)間則會(huì)有與漂移而存有誤差。因此,需要兩者(相互調(diào)整)來(lái)確保航向的正確。 現(xiàn)在一般
2020-06-08 17:01:251624 目前,在陀螺儀應(yīng)用領(lǐng)域,按精度細(xì)分的話,陀螺儀可分為商用陀螺儀、戰(zhàn)術(shù)陀螺儀、導(dǎo)航陀螺儀、戰(zhàn)略陀螺儀。
2020-07-14 16:00:393794 MEMS陀螺儀姿態(tài)算法研究綜述
2021-05-26 14:24:1439 一種簡(jiǎn)易的MEMS陀螺儀標(biāo)定方法
2021-06-11 14:31:0016 當(dāng)MEMS慣性測(cè)量單元(IMU)在運(yùn)動(dòng)控制系統(tǒng)中作為反饋傳感器運(yùn)行時(shí),陀螺儀噪聲是一種需要了解的重要行為,因?yàn)樗赡軐?dǎo)致其所監(jiān)控的平臺(tái)上出現(xiàn)不良的物理運(yùn)動(dòng)。根據(jù)條件的不同,在為特定MEMS IMU開發(fā)針對(duì)應(yīng)用的早期噪聲估計(jì)時(shí),需要考慮許多潛在的誤差源。
2023-01-08 14:59:311458 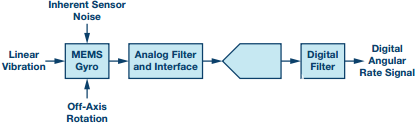
Mark Marshall博士將探討這款MEMS陀螺儀的工作原理,并詳細(xì)介紹其性能規(guī)格和Pinpoint結(jié)構(gòu),包括MEMS振動(dòng)環(huán)的設(shè)計(jì)與制造。
2023-03-20 09:43:47846 Ericco的MEMS陀螺儀根據(jù)軸數(shù)分為單軸、雙軸和三軸。它分為工業(yè)級(jí)、戰(zhàn)術(shù)級(jí)(ER-MG-056、ER-MG-067)和導(dǎo)航級(jí)(ER-MG2-50/100、ER-MG2-300/400)。戰(zhàn)術(shù)
2023-07-07 10:16:472085 。它在陀螺儀市場(chǎng)占有重要地位,率先在汽車和消費(fèi)電子領(lǐng)域得到大量應(yīng)用。隨著性能的進(jìn)一步提高,MEMS陀螺儀的應(yīng)用也已擴(kuò)展到工業(yè)、航空航天等領(lǐng)域,使其在慣性系統(tǒng)應(yīng)用領(lǐng)域得到極大拓展。
2023-07-10 14:13:18739 
摘要:MEMS(微機(jī)電系統(tǒng))陀螺儀在慣性導(dǎo)航、姿態(tài)控制和運(yùn)動(dòng)測(cè)量等領(lǐng)域中具有重要應(yīng)用。然而,傳統(tǒng)MEMS陀螺儀在尺寸和性能方面存在一定的限制。本文介紹了一種基于陶瓷基板的技術(shù)芯片實(shí)現(xiàn)了小型化MEMS
2023-07-10 15:03:37369 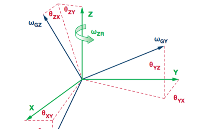
ER-MG2 -50/100高性能尋北MEMS陀螺儀的零偏穩(wěn)定性可達(dá)0.1°/hr,零偏重復(fù)性為0.1°/hr,可見其測(cè)量精度非常高。
2023-07-13 09:32:222309 本文介紹了一種用于分離式MEMS陀螺儀的全差分、低閃爍噪聲、自動(dòng)幅度控制(AAC)的ASIC。
2023-10-17 15:20:19422 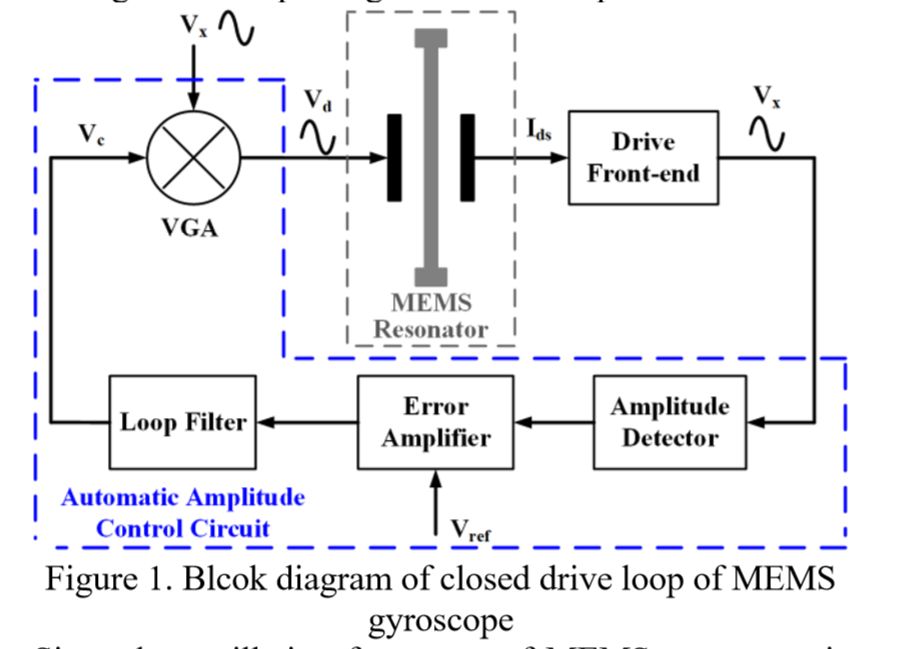
電子發(fā)燒友網(wǎng)站提供《采用MEMS陀螺儀的低噪聲反饋控制設(shè)計(jì)方案.pdf》資料免費(fèi)下載
2023-11-24 15:53:270 。陀螺儀通過(guò)使用慣性傳感器(如MEMS)來(lái)測(cè)量物體的旋轉(zhuǎn)角速度。在x軸和y軸上分別放置兩個(gè)陀螺儀,可以更全面地捕捉到物體的旋轉(zhuǎn)和轉(zhuǎn)動(dòng)。 陀螺儀x軸通常與設(shè)備的長(zhǎng)軸(通常是水平軸)對(duì)齊,它測(cè)量物體繞x軸旋轉(zhuǎn)的角速度,也就是通常所說(shuō)
2024-01-17 11:10:11525 MEMS加速度計(jì)與MEMS陀螺儀是現(xiàn)代慣性導(dǎo)航系統(tǒng)中最常用的傳感器。
2024-02-17 14:05:00345 
 電子發(fā)燒友App
電子發(fā)燒友App













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論