 電子發燒友App
電子發燒友App


和傳統的傳感器相比,微型傳感器具有許多新特性,它們能夠彌補傳統傳感器的不足,具有廣泛的應用前景,越來越受到重視。文中詳細介紹了一些微型傳感器件的結構和原理,說明了微型傳感器的基本性能特點和微型傳感器的發展趨勢。
微型傳感器的特點
傳統的傳感器件因其制作工藝與半導體IC 工藝不兼容,所以無論在性能、尺寸和成本上都不能與通過IC 技術制作的高速度、高密度、小體積和低成本的信號處理器件相適應,于是制約了整個系統的集成化、批量化和性能的充分發揮。
微型傳感器不是傳統傳感器簡單的物理縮小的產物,而是以新的工作機制和物化效應,使用標準半導體工藝兼容的材料,通過MEMS 加工技術制備的新一代傳感器件,具有小型化、集成化的特點,可以極大地提高傳感器性能。在信號傳輸前就可放大信號,從而減少干擾和傳輸噪音,提高信噪比;在芯片上集成反饋線路和補償線路,可改善輸出的線性度和頻響特性,降低誤差,提高靈敏度。
具有陣列性。可以在一塊芯片上集成敏感元件、放大電路和補償線路。可以把多個相同的敏感元件集成在同一芯片上;具有良好的兼容性,便于與微電子器件集成與封裝。
利用成熟的硅微半導體工藝加工制造,可以批量生產,成本非常低廉。
典型的微型傳感器
微機械加速度傳感器
它是最早利用MEMS 技術開發成功,并取得廣泛應用的微型傳感器之一。微加速度傳感器的主要工作方式有壓阻式、電容式、力平衡式和諧振式,現在又出現了微機械熱對流式加速度傳感器。
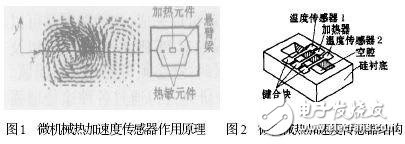
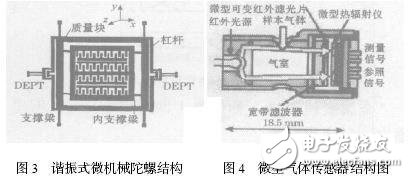
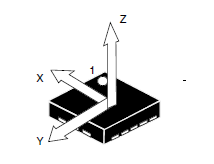
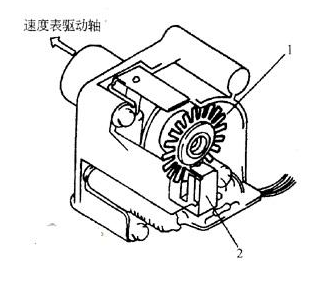
圖1 和圖2 分別給出了新型加速度傳感器作用原理和結構示意圖。在懸臂梁的端部有一擴散加熱電阻,加熱電阻通電后所產生的熱量全部沿梁和上下兩個散熱板傳遞。向上下兩個散熱板傳導熱量的速率取決于加熱電阻與散熱板間的距離,沿懸臂梁的溫度分布曲線由懸臂梁與散熱板間的相對位置來確定。可以通過分布在懸臂梁上的P 型硅/ 鋁熱電偶對懸臂梁溫度的測量來測定懸臂梁與兩個散熱板的相對位置,從而實現對加速度的測量。
這種傳感器的熱電偶具有很高的靈敏度,能夠直接輸出電壓信號,可以省去復雜的信號處理電路,并且對電磁干擾不敏感。在懸臂梁與散熱板的間距為140μm 和200μm、梁長為100μm、梁寬為4μm、梁厚為10μm 時,傳感器的靈敏度為1 mV/ g ,測量范圍為25g ,分辨率為0.003 g. 由于結構中沒有大的質量塊,微機械熱對流式加速度傳感器具有很強的抗沖擊能力,但其頻率響應范圍很窄 。
微機械角速度傳感器
對于旋轉角速度和旋轉角度的檢測,需要采用陀螺儀。基于MEMS 技術的微機械陀螺因其成本低,能批量生產,可廣泛應用于汽車牽引控制系統、醫用設備、軍事設備等方面。微機械陀螺有雙平衡環結構、懸臂梁結構、音叉結構等,其工作原理基于哥氏效應。
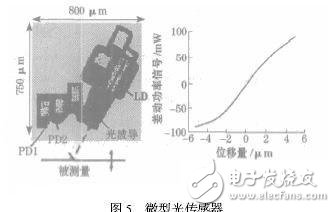
諧振式微機械陀螺的結構如圖3 所示:它由固定在基底上的靜止驅動器、質量塊(包括內部動齒框架及外部框架) 和2個雙端音叉諧振器(DETF) 組成。質量塊通過4 個支承梁固定在基底上。當在靜止驅動器上加上驅動電壓(角頻率為ωp)時,質量塊的內部動齒框架作沿著y 軸方向的振蕩運動。如果一個外部的繞z 軸的轉動(輸入信號Ω) 作用到芯片上,質量塊產生沿x 軸方向的哥氏力,且通過內支承梁轉移到外框架上, 外框架由兩對支承梁固定并可沿x 軸方向運動,通過兩對杠桿這個力被放大并傳遞到外框架兩邊的兩個雙端音叉諧振器(DETF) 上。DETF 上輸出信號頻率的變化就反映了輸入角速率的變化。
微機械陀螺的平面外輪廓的結構參數為1mm2 ,厚度僅為2μm. 而文獻給出的振動輪式硅微機械陀螺的直徑為1 mm ,厚度為19μm ,寬度為5μm ,電極間距為7μm.
微型氣敏傳感器
微型氣敏傳感器可分為硅基氣敏傳感器和硅微氣敏傳感器。前者是以硅為襯底,敏感層為非硅材料,是當前微氣敏傳感器的主流。氣敏傳感器的敏感性能與工作溫度有很大關系,要求傳感器系統本身具備加熱元件和溫度探測元件。而基于MEMS 技術的微型氣體傳感器具有高度集成化的特點,易于將氣敏元件和溫度探測元件集成一體,保證了氣敏傳感器性能。
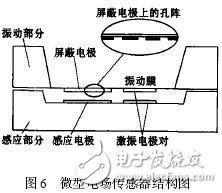
圖4 是一種體積僅為1 cm2 的二氧化碳氣體傳感器結構示意圖。該氣體傳感器的工作機理是基于非散射的紅外雙光束、雙波長的測量原理 。它的結構包括一個常規的小型紅外光源、一個氣室和一個紅外探測單元。紅外探測單元由兩個單晶硅微型熱輻射儀、一個寬帶濾波器和一個微型可變紅外濾光片構成,參考信號源可以補償由于光源污染產生的測量信號衰減帶來的影響。在二氧化碳體積分數2000 &TImes;10 - 6的樣氣中,該傳感器具有20 &TImes;10 - 6的分辨力(1σ) ,時間常數為3 s.
微型光傳感器
圖5 是一種集成微型位移光傳感器的顯微照片。該傳感器基底面積為750μm &TImes;80μm ,單片集成激光二極管(LD) ,聚酰亞胺光波導和分離式光電二極管(PD) 。它將來自LD 的光束照射到測量目標上,用分離式光電二極管探測其反射光斑。若物體移位,則光電二極管上的光斑會隨之移動。用雙分離式PD 的工作功率求出位移量,從而可以高精度測量被測目標的位移。該傳感器的測量范圍為7.2μm ,分辨率為4 nm(光功率為0.5 mW) 和1.7 nm(光功率為1 mW) 。
微型電場傳感器
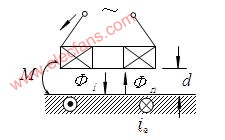
電場傳感器是基于導體在電場中產生感應電荷的原理。圖6 提供了一種基于MEMS 技術設計的微型電場傳感器的結構圖。傳感器由振動和感應兩大部分組成。振動部分的核心是振動膜,由氮化硅(Si3N4)薄膜制備,可以在圖示的垂直方向上振動。感應電極、屏蔽電極和激振電極對由分別生長在振動膜和感應部分上的金屬電極構成。屏蔽電極接地,其上有孔形陣列。傳感器工作時,激振電極對連接交流電壓源,通過兩個電極間的庫侖力作用引起振動膜垂直振動。調節交流電壓頻率,使振動膜在諧振點附近達到預定的振幅。此時感應電極接受經過屏蔽電極周期性屏蔽的電場,產生感應電流,經前置放大后接外部檢測電路。微電場傳感器彌補了一般電場傳感器體積大、能耗高的缺點,可以應用于各種環境下靜電場及低頻電場的測量,有著廣闊的應用前景 。
微型傳感器的發展趨勢
微型傳感器的智能化
具有自診斷、自校準、自補償功能,能夠實現對信息的存儲和記憶,能夠完成多傳感器多參數混合測量和對信號數據的實時處理,并且實現數字量的輸出。
智能微型傳感器可以從根本上改變傳統傳感器功能單一的狀況,把對物理信號的探測、分析和數字化處理集成。不僅使傳感系統的性能得到極大地提高,而且能夠簡化傳感系統的設計,大大降低成本。
如今,在已經實現微型傳感器初步智能化的基礎上,人們正利用模糊理論和神經網絡等技術力圖實現微傳感器智能化的更高形態—分布式網絡化 。
微型傳感器的多功能化
借助于敏感元件中不同的物理結構或化學物質及其各不相同的表征方式,用單獨一個傳感器系統來同時實現多種傳感器的功能,這是目前微型傳感器技術一個全新的發展方向。
多功能微型傳感器可以對多種物理量進行探測。比如,微型數字式三端口傳感器就是同時采用熱敏元件、光敏元件和磁敏元件進行組配,從而達到探測多種信號目的,這種組配方式的傳感器不但能夠輸出模擬信號,而且還能夠輸出頻率信號和數字信號。
多功能微傳感器在許多應用領域中可以全面而準確的反映客觀對象。對它的研究多集中在觸覺敏感、嗅覺傳感以及視聽辨別等各類仿生傳感器上,比如由PVDF 材料、無觸點皮膚敏感系統以及橡膠觸覺傳感器等組成人造皮膚觸覺傳感器;由交叉選擇式氣體傳感器陳列和恰當模式識別系統組成的,具有識別簡單和復雜氣味的能力的“電子鼻”等。
















 工商網監
工商網監
評論