我們經(jīng)歷了臺(tái)式電腦從無(wú)到有,由盛及衰的過(guò)程,經(jīng)歷著平板電腦和手機(jī)蠶食個(gè)人電腦的市場(chǎng)洗牌過(guò)程,作為PC行業(yè)的上游企業(yè),以處理器為核心產(chǎn)品線的AMD,如何在市場(chǎng)的風(fēng)云變幻中保持不變的成長(zhǎng)動(dòng)力?##在創(chuàng)新
2014-09-26 10:27:00 606
606 在本文中,我們使用ADI的IMU ADIS16470和地磁傳感器來(lái)開(kāi)發(fā)平臺(tái)和算法,實(shí)現(xiàn)捷聯(lián)慣性導(dǎo)航系統(tǒng)。但是,地磁傳感器只能提供姿態(tài)信息。對(duì)于航位推算或距離測(cè)量,我們只能使用IMU中的 加速度傳感器。
2020-04-18 10:58:472924 
探索歷經(jīng)百年風(fēng)云變幻之后的5G碼頭
2023-04-11 18:01:24470 
上一期中挑選了國(guó)外三家知名的IMU廠商的主流IMU產(chǎn)品進(jìn)行盤(pán)點(diǎn)分析。可以看到,國(guó)外主流的IMU廠商都在精度和低耗上下足了功夫,同時(shí)都在發(fā)力向高端IMU市場(chǎng)進(jìn)軍推出解決方案。這一期我們將視線轉(zhuǎn)回國(guó)內(nèi),來(lái)看看國(guó)內(nèi)MEMS廠商旗下產(chǎn)品。
2021-09-04 08:00:004812 IMU一直都是MEMS領(lǐng)域中極為重要的一類產(chǎn)品,不管是在消費(fèi)電子、汽車(chē)電子還是工業(yè)自動(dòng)化領(lǐng)域都有著廣泛地應(yīng)用。目前以IMU為主的組合傳感器發(fā)展非常迅速,且不說(shuō)在消費(fèi)類電子市場(chǎng)上各家競(jìng)爭(zhēng)激烈,在工業(yè)
2022-02-01 10:01:415530 IMU與地磁融合導(dǎo)航時(shí),在地磁傳感上有兩個(gè)必須要消除的誤差。第一個(gè)是由傳感器和電路引起的失調(diào)誤差,第二個(gè)是標(biāo)度誤差。這兩種誤差都容易受到周?chē)怒h(huán)境的干擾。校準(zhǔn)時(shí)可以通過(guò)IMU的加速度計(jì)校準(zhǔn)其傾斜角
2022-03-29 06:30:001637 電子發(fā)燒友網(wǎng)報(bào)道(文/李寧遠(yuǎn))慣性測(cè)量單元一直都是MEMS領(lǐng)域中極為重要的一類產(chǎn)品,不管是在消費(fèi)電子、工業(yè)自動(dòng)化還是汽車(chē)自動(dòng)駕駛領(lǐng)域都有著廣泛的應(yīng)用。將加速度傳感器、陀螺儀等MEMS器件(有些還會(huì)
2022-11-02 01:17:00904 電子發(fā)燒友網(wǎng)報(bào)道(文/梁浩斌)隨著汽車(chē)智能化的滲透,輔助駕駛系統(tǒng)以及車(chē)載導(dǎo)航幾乎已經(jīng)成為了目前乘用車(chē)的標(biāo)配產(chǎn)品。而在這兩項(xiàng)功能中,慣性傳感器IMU都起到了不可或缺的作用,IMU通過(guò)MEMS技術(shù)
2023-04-07 01:10:003638 
電子發(fā)燒友網(wǎng)報(bào)道(文/李寧遠(yuǎn))在運(yùn)控領(lǐng)域,IMU一直都是核心的傳感器件,想要實(shí)現(xiàn)精準(zhǔn)的運(yùn)動(dòng),IMU提供的速度信息是必不可少的。尤其是近年來(lái)自動(dòng)駕駛、無(wú)人駕駛等話題的高漲,IMU覆蓋的應(yīng)用也是越來(lái)越
2023-08-01 00:08:001007 市場(chǎng)分析中指出,卡塔爾對(duì)擴(kuò)大和建設(shè)ICT市場(chǎng),正以一個(gè)復(fù)合型多樣化的年增長(zhǎng)率(CAGR)增長(zhǎng),2015年ICT的市場(chǎng)價(jià)值將達(dá)36.4億美金。卡塔爾地區(qū)領(lǐng)導(dǎo)人一直致力于將ICT技術(shù)融入***服務(wù)中,建立具有
2011-11-15 09:37:04
年歷史,現(xiàn)已發(fā)展成為世界上規(guī)模最大、水平最高和影響最廣的消費(fèi)類電子產(chǎn)品展覽會(huì)之一。時(shí)至今日,該展仍然不失為引領(lǐng)世界消費(fèi)類電子技術(shù)和產(chǎn)品發(fā)展潮流的風(fēng)向標(biāo)和國(guó)際電子貿(mào)易的“立交橋”。根據(jù)美國(guó)消費(fèi)電子協(xié)會(huì)
2013-03-27 10:51:23
目標(biāo)市場(chǎng)為中南美洲及加勒比周邊地區(qū)主辦周期:每年一屆主辦單位:AATS美洲展覽公司內(nèi)容:1. 消費(fèi)類電子:數(shù)碼產(chǎn)品、通訊產(chǎn)品、汽車(chē)電子產(chǎn)品、電腦及周邊產(chǎn)品、照明及安防產(chǎn)品等;2. 小家電產(chǎn)品,廚房電器等
2014-05-21 17:09:28
及消費(fèi)類電子產(chǎn)品展覽會(huì)之一,是世界各國(guó)消費(fèi)類電子產(chǎn)品生產(chǎn)商和貿(mào)易商聚集和展示新產(chǎn)品、新技術(shù)最主要的平臺(tái),也是歐洲消費(fèi)類電子產(chǎn)品采購(gòu)商、批發(fā)商、零售商了解、采購(gòu)該領(lǐng)域商品的首選。2013年,IFA展迎來(lái)了第
2013-08-21 16:41:12
及消費(fèi)類電子產(chǎn)品展覽會(huì)之一,是世界各國(guó)消費(fèi)類電子產(chǎn)品生產(chǎn)商和貿(mào)易商聚集和展示新產(chǎn)品、新技術(shù)最主要的平臺(tái),也是歐洲消費(fèi)類電子產(chǎn)品采購(gòu)商、批發(fā)商、零售商了解、采購(gòu)該領(lǐng)域商品的首選。2013年,IFA展迎來(lái)了第
2013-08-21 16:47:30
機(jī)市場(chǎng)開(kāi)始崛起,小米、OPPO、VIVO合計(jì)占比將近一半,約44%。總之,在印度人均收入水平不斷增長(zhǎng)和經(jīng)濟(jì)高速發(fā)展的大背景下,人們對(duì)家電及消費(fèi)類電子產(chǎn)品的消費(fèi)需求也越來(lái)越大,其市場(chǎng)前景非常廣闊
2018-08-10 10:32:22
3DM-GX5-15 慣性測(cè)試單元IMU3DM-GX5-15 慣性測(cè)試單元IMU 3DM-GX5-15 慣性測(cè)試單元IMU 詳詢請(qǐng)致電:***工作q:11398788543DM-GX5-15】IMU
2020-12-07 09:05:45
IMU 3DM-GX5-25 IMU 3DM-GX5-25IMU 3DM-GX5-25品牌負(fù)責(zé)人: 吳經(jīng)理 132.466.75432工作Q: 1139878854LORD Microstrain
2020-12-16 14:18:35
IMU ACCEL/GYRO/MAG 3-AXIS SPI
2023-03-28 19:37:16
MOD MEMS IMU 6AXIS LOW RANGE
2023-03-22 07:29:35
IMU ACCEL/GYRO/MAG 3-AXIS SPI
2023-03-22 07:29:31
IMU ACCEL/GYRO/MAG 3-AXIS SPI
2023-03-22 07:29:35
IMU ACCEL/GYRO/MAG 3-AXIS SPI
2023-03-28 19:37:18
IMU的工作原理是什么?IMU、AHRS、VRU和INS的區(qū)別在哪?怎樣去搭建一種IMU誤差模型?慣性傳感器分為哪幾種?怎樣去選擇?
2021-07-13 06:16:20
IMU角度傳感器,對(duì)PCB布局有啥要求,不知道有沒(méi)有清楚的,比如布局位置,是否要求在PCB板中間?是否只能放置在PCB的正面之類的?
2022-04-08 09:46:26
在網(wǎng)站上下載的評(píng)估板軟件,IMU-Evaluation.exe點(diǎn)擊打開(kāi)顯示unable to connect to an Eval-ADIS board.Error Message:無(wú)法加載DLL
2018-12-13 09:10:43
\omegakω?,c ω c_\omegacω?分別表示加速度計(jì)與陀螺儀的溫漂系數(shù)。三、IMU標(biāo)定在SLAM領(lǐng)域中,單純的視覺(jué)傳感器在現(xiàn)階段無(wú)法通過(guò)計(jì)算機(jī)視覺(jué)完成精確的位姿計(jì)算,一般采用imu作為補(bǔ)充,進(jìn)行多
2020-12-24 15:56:31
現(xiàn)在需要一款高精度的IMU,包括三軸mems陀螺儀,加速度計(jì),磁力計(jì),希望了解的能給推薦一款最好的
2015-04-20 15:16:30
EVALBOARDFORADIS16IMU4
2023-03-30 12:04:37
購(gòu)買(mǎi)正點(diǎn)原子的ATK-IMU901模塊后,發(fā)現(xiàn)例程給的是HAL庫(kù)的,以下是我將其轉(zhuǎn)為標(biāo)準(zhǔn)庫(kù)的方法。1.將例程文件夾中的IMU901和usart2復(fù)制到新的工程文件夾中的HARDWARE里,并在新工
2022-01-07 07:39:45
Estimation of IMU and MARG orientation using a
2016-08-17 12:23:29
FHP3230IMU8X - Single, Dual, and Quad, High-Speed, 2.7V to 12V, Rail-to-Rail Amplifiers - Fairchild Semiconductor
2022-11-04 17:22:44
我正在使用LSM6DS3 IMU傳感器開(kāi)發(fā)一個(gè)項(xiàng)目。我發(fā)現(xiàn)我得到的數(shù)據(jù)在一天的不同時(shí)間有點(diǎn)不同。測(cè)試設(shè)置基本相同。我懷疑差異是由于環(huán)境溫度造成的。溫度是否會(huì)影響數(shù)據(jù)?這個(gè)傳感器有一個(gè)內(nèi)部溫度傳感器
2018-10-10 10:47:40
簡(jiǎn)介對(duì)于在反饋環(huán)路中采用MEMS慣性測(cè)量單元(IMU) 的高性能運(yùn)動(dòng)控制系統(tǒng),傳感器對(duì)準(zhǔn)誤差常常是其關(guān)鍵考慮之一。對(duì)于IMU中的陀螺儀,傳感器對(duì)準(zhǔn)誤差描述各陀螺儀的旋轉(zhuǎn)軸與系統(tǒng)定義的"
2018-10-17 10:39:42
嘿,我們正在使用NUCLEO-F401RE板,并期待通過(guò)Bosch(BMI 160)連接imu傳感器,其中包含陀螺儀+加速度計(jì)。我想知道是否有一個(gè)傳感器融合庫(kù)用于ST中的這個(gè)特定傳感器,它可以幫助
2019-04-26 08:13:18
消費(fèi)類電子量大,價(jià)格便宜,性能也好;但是消費(fèi)類電腦零部件的供貨期往往遠(yuǎn)遠(yuǎn)短于醫(yī)療設(shè)備,甚至短于研發(fā)周期。醫(yī)療設(shè)備中使用消費(fèi)類電腦部件,而非工業(yè)電腦零部件的風(fēng)險(xiǎn)有哪些,該如何應(yīng)對(duì)呢。
2018-04-12 17:45:05
目標(biāo)是基于IMU傳感器創(chuàng)建精確(盡可能便宜)的傾角儀。它應(yīng)測(cè)量旋轉(zhuǎn)輪的角度變化(速度高達(dá)250度/秒),精度為0.01度。我并不是拒絕少數(shù)IMU用于獲得更好的重新封閉。 我正在尋找標(biāo)記
2019-02-15 08:41:08
如何使用imu_utils工具生成IMU的Allan方差標(biāo)定曲線?
2021-11-22 07:23:12
我們?cè)谖覀兊男酒M/PCB 中使用 ST IMU LSM6DSL。我們正在尋找現(xiàn)成的軟件或算法來(lái)實(shí)施到我們的固件中,以確定來(lái)自 IMU 數(shù)據(jù)的速度/加速度和距離。有沒(méi)有可以分享的示例代碼?
2023-01-06 06:14:50
我是做消費(fèi)類的音響產(chǎn)品,目前想了解下防盜版方面的一些問(wèn)題,有什么好的指點(diǎn)嗎?
2018-05-17 09:48:15
支持計(jì)步的低功耗 IMU?或者這些是我最好的選擇嗎?我想最大限度地降低 IMU 的功耗以及控制 IMU 的 MCU 的功耗。謝謝!
2023-01-03 09:21:13
深圳哪家公司有智能管理單元(IMU)
2017-09-01 14:16:32
要求是做一個(gè)能夠測(cè)繪鋼筋三維軌跡的東西,我想著用一個(gè)探針或其他東西,沿著鋼筋路徑走一次,然后記錄下該探針的三維軌跡,再在計(jì)算機(jī)上繪制出該三維軌跡。在網(wǎng)上查到可以使用IMU記錄加速度和陀螺儀,然后二次
2019-03-20 09:24:24
1. 引言在設(shè)計(jì)消費(fèi)類音頻產(chǎn)品的系統(tǒng)框架時(shí),一般的思路是選用MCU+DSP雙芯片分別滿足驅(qū)動(dòng)外設(shè)+數(shù)字音頻處理的需求。以雙通道立體聲音箱為例,一顆主頻在100MHz左右的MCU搭配一顆ADI的入門(mén)級(jí)
2021-08-17 08:50:37
在哪里工業(yè)級(jí)MEMS技術(shù)是相對(duì)消費(fèi)級(jí)器件而言的,前者成本更高,但遠(yuǎn)低于傳統(tǒng)光纖或環(huán)形激光陀螺儀技術(shù)。 這里將從消費(fèi)級(jí)市場(chǎng)開(kāi)始,說(shuō)明我們所稱的技術(shù)差別。 從多個(gè)角度看,這種技術(shù)差異都是值得關(guān)注的,正如
2019-01-04 10:23:47
最近在一直研究四軸的一些東西,不過(guò)聽(tīng)到學(xué)長(zhǎng)說(shuō)四軸用IMU算法比較好,所以我想問(wèn)一下IMU 和AHRS算法用stm32如何實(shí)現(xiàn)呢?他們的區(qū)別是什么?哪個(gè)更好一些呢???求各位i解答!!
2019-04-19 06:36:22
看了很多個(gè)IMU的參數(shù),3dB帶寬都很高,約300-500Hz,設(shè)備的固有振動(dòng)大約是15~35Hz的范圍。ADI會(huì)推薦使用什么方法減震?
2019-01-24 13:45:35
ADIS16IMU2和ADIS1644X/FLEX在哪可以買(mǎi)到,自己做的話兩個(gè)電容是多大的,兩排管腳什么型號(hào),有沒(méi)有關(guān)于ADIS16IMU2的詳資料
2019-01-08 11:16:33
?2020年,半導(dǎo)體行業(yè)可以說(shuō)是風(fēng)云變幻的一年。在新冠肺炎疫情的沖擊下,市場(chǎng)先抑后揚(yáng),從一度悲觀預(yù)測(cè)的負(fù)增長(zhǎng),轉(zhuǎn)為5.1%的正增長(zhǎng)。資本領(lǐng)域更是提速換擋,美國(guó)費(fèi)城半導(dǎo)體指數(shù)從2020年年初的1800
2021-07-27 06:50:31
開(kāi)啟時(shí)間為0.1秒或100毫秒,對(duì)應(yīng)的誤差小于0.001度。各類IMU產(chǎn)品的區(qū)別在哪里工業(yè)級(jí)MEMS技術(shù)是相對(duì)消費(fèi)級(jí)器件而言的,前者成本更高,但遠(yuǎn)低于傳統(tǒng)光纖或環(huán)形激光陀螺儀技術(shù)。 這里將從消費(fèi)級(jí)市場(chǎng)
2018-11-01 11:18:23
針對(duì)傳統(tǒng)的IMU信號(hào)采集系統(tǒng)尺寸大、成本高和集成度低等不足,介紹了以DSP為核心的集成式IMU信號(hào)采集系統(tǒng)的解決方案,詳細(xì)闡述了系統(tǒng)硬件實(shí)現(xiàn)方案和軟件實(shí)時(shí)誤差校正算法。該系統(tǒng)具
2011-05-18 16:55:42 36
36 iSensor IMU安裝技巧
2012-12-13 17:04:3763 無(wú)刷云臺(tái)IMU原理圖,采用ADXRS623單軸陀螺儀,簡(jiǎn)單實(shí)用。
2016-01-11 15:56:2834 用啟天四軸做飛控和瑞薩做IMU的四旋翼方案-已經(jīng)試飛成功用啟天四軸做飛控和瑞薩做IMU的四旋翼方案-已經(jīng)試飛成功用啟天四軸做飛控和瑞薩做IMU的四旋翼方案-已經(jīng)試飛成功
2016-08-23 17:56:0019 對(duì)于復(fù)雜且高動(dòng)態(tài)慣性配置的MEMS IMU應(yīng)用,評(píng)估功能時(shí)需要考慮許多屬性。在設(shè)計(jì)周期早期評(píng)估這些屬性優(yōu)于追逐開(kāi)放性成果,從而實(shí)現(xiàn)“盡可能精確”。
2018-07-11 10:33:0027106 
正在將MEMS慣性測(cè)量單元(IMU)用于個(gè)人交通工具平臺(tái)的自平衡制導(dǎo)系統(tǒng),是否會(huì)有一款面向消費(fèi)者,能消除各傳感器之間的全部對(duì)齊誤差,并且所有核心傳感器元件都集成在單個(gè)芯片上的IMU?
2017-08-29 15:30:216599 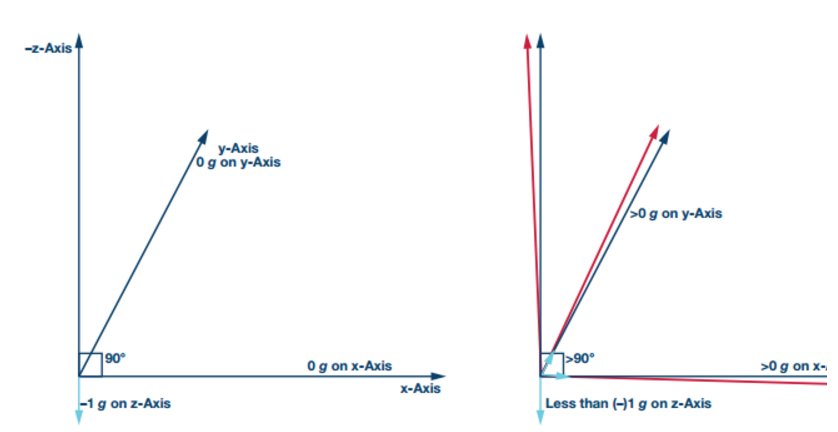
FIS1100IMU集成了專有的AttitudeEngine運(yùn)動(dòng)處理器和九軸傳感器融合算法,將處理功率降低至原來(lái)的十分之一,是具有完整制定定位精度的消費(fèi)電子IMU。Xsens提供傳感器融合和系統(tǒng)級(jí)的整體解決方案。20億件目標(biāo)市場(chǎng),跨越多個(gè)細(xì)分應(yīng)用市場(chǎng)。廣泛應(yīng)用于支持運(yùn)動(dòng)、采用電池供電的應(yīng)用中。
2017-09-12 17:20:1018 高工鋰電對(duì)于2017年新三板鋰電領(lǐng)域相關(guān)變化進(jìn)行了盤(pán)點(diǎn),用6大關(guān)鍵詞回顧新三板鋰電企業(yè)一整年的風(fēng)云變幻,同時(shí)對(duì)于即將到來(lái)的2018年做出理性的研判和期許。
2017-12-27 15:13:133326 本視頻展示了在“自主”操作中,如何使用ADI FRC IMU板來(lái)幫助機(jī)器人感應(yīng)和避開(kāi)障礙。
更多信息和軟件:https://ez.analog.com/blogs/engineeringmind
2018-06-03 02:45:001811 用于智能農(nóng)業(yè)的精密MEMS IMU。
2018-06-01 17:00:004611 使用模擬設(shè)備的慣性測(cè)量單元(IMU)傳感器ADIS16470和PNI的地磁傳感器RM3100構(gòu)建的捷聯(lián)慣性導(dǎo)航系統(tǒng)(SINS)。
2019-04-15 17:39:466828 
在本視頻中,我們將快速了解一下ADI近期推出的19款全新MEMS IMU給市場(chǎng)帶來(lái)的許多進(jìn)步
2019-07-24 06:19:002599 本視頻展示了在“自主”操作中,如何使用ADI FRC IMU板來(lái)幫助機(jī)器人感應(yīng)和避開(kāi)障礙。
2019-06-28 06:07:001390 在過(guò)去的一年里,全球晶圓代工廠的格局發(fā)生了變化。
2019-04-17 16:09:092206 
德國(guó)、法國(guó)、英國(guó)、加拿大、荷蘭等國(guó)的領(lǐng)導(dǎo)人表示,他們的政府不打算跟隨美國(guó)并阻止華為參與建設(shè)所在國(guó)家的5G商用網(wǎng)絡(luò)。
2019-05-20 17:16:1820908 詳細(xì)解說(shuō)IMU慣性測(cè)量單元 IMU可獲得載體的姿態(tài)、速度和位移等信息,被廣泛用于汽車(chē)、機(jī)器人領(lǐng)域,也被用于需要用姿態(tài)進(jìn)行精密位移推算的場(chǎng)合,如潛艇、飛機(jī)等慣性導(dǎo)航設(shè)備中。 基于MEMS技術(shù)的IMU
2020-06-11 11:00:131752 詳細(xì)解說(shuō)IMU慣性測(cè)量單元 IMU可獲得載體的姿態(tài)、速度和位移等信息,被廣泛用于汽車(chē)、機(jī)器人領(lǐng)域,也被用于需要用姿態(tài)進(jìn)行精密位移推算的場(chǎng)合,如潛艇、飛機(jī)等慣性導(dǎo)航設(shè)備中。 基于MEMS技術(shù)的IMU
2020-06-01 11:22:016930 IMU和AHRS之間的區(qū)別 AHRS航姿參考系統(tǒng) 航姿參考系統(tǒng)包括基于MEMS的三軸陀螺儀,加速度計(jì)和磁強(qiáng)計(jì)。航姿參考系統(tǒng)與慣性測(cè)量單元IMU的區(qū)別在于,航姿參考系統(tǒng)(AHRS)包含了嵌入式的姿態(tài)
2020-04-20 11:02:132029 IMU慣性測(cè)量單元是什么? 慣性測(cè)量單元是測(cè)量物體三軸姿態(tài)角(或角速率)以及加速度的裝置。一般的,一個(gè)IMU包含了三個(gè)單軸的加速度計(jì)和三個(gè)單軸的陀螺,加速度計(jì)檢測(cè)物體在載體坐標(biāo)系統(tǒng)獨(dú)立三軸的加速度
2020-04-20 10:32:576231 IMU慣性測(cè)量單元是什么? IMU大多用在需要進(jìn)行運(yùn)動(dòng)控制的設(shè)備,如汽車(chē)和機(jī)器人上。也被用在需要用姿態(tài)進(jìn)行精密位移推算的場(chǎng)合,如潛艇、飛機(jī)、導(dǎo)彈和航天器的慣性導(dǎo)航設(shè)備等。 IMU的基組成 利用
2020-04-18 00:35:09740 IMU慣性測(cè)量單元的基本原理 IMU是測(cè)量物體三軸姿態(tài)角(或角速率)以及加速度的裝置。 其中一個(gè)IMU包含了三個(gè)單軸的加速度計(jì)和三個(gè)單軸的陀螺,加速度計(jì)檢測(cè)物體在載體坐標(biāo)系統(tǒng)獨(dú)立三軸的加速度信號(hào)
2020-04-26 15:26:353559 IMU慣性測(cè)量單元介紹 慣性測(cè)量單元的工作原理是:使用一個(gè)或多個(gè)加速度感應(yīng)器,探測(cè)當(dāng)前的加速度速率;使用一個(gè)或多個(gè)偏航陀螺儀,檢測(cè)在方向、翻滾角度和傾斜姿態(tài)上的變化。有一些慣性測(cè)量單元還同時(shí)包括
2020-06-08 14:29:334054 IMU指的是慣性測(cè)量單元。IMU大多用在需要進(jìn)行運(yùn)動(dòng)控制的設(shè)備,如汽車(chē)和機(jī)器人上。也被用在需要用姿態(tài)進(jìn)行精密位移推算的場(chǎng)合,如潛艇、飛機(jī)、導(dǎo)彈和航天器的慣性導(dǎo)航設(shè)備等。
2020-11-20 15:24:1954523 2020可以說(shuō)是風(fēng)云變幻的一年,在這一年中,我們經(jīng)歷了新冠疫情,經(jīng)歷了全球經(jīng)濟(jì)經(jīng)歷大蕭條以來(lái)的最嚴(yán)重危機(jī),美股熔斷,國(guó)際油價(jià)一夜暴“負(fù)”等諸多歷史。受?chē)?guó)際形勢(shì)和疫情影響,經(jīng)濟(jì)環(huán)境中存在諸多不確定性,“國(guó)產(chǎn)替代”和加強(qiáng)“內(nèi)循環(huán)”的想法逐漸被重視。
2020-11-25 16:36:21708 AN-1045: iSensor? IMU 安裝技巧
2021-03-21 00:58:068 ADIS16IMU2/PCBZ Wiki指南
2021-03-23 13:17:438 精密微型IMU
2021-04-26 13:25:007 iSensor MEMS慣性測(cè)量單元(IMU)手冊(cè)
2021-05-24 09:37:1121 常被朋友們問(wèn)起 到底啥是陀螺儀模塊,IMU模塊,慣導(dǎo)模塊。這里以我的理解給大家一個(gè)通俗的解釋: 說(shuō)明:以下說(shuō)法是為了不改變?cè)獾那闆r下方便快速理解的比較通俗的解釋,不是正式定義。 6軸,9軸,IMU
2021-06-23 16:55:0114605 隨著自動(dòng)駕駛技術(shù)越來(lái)多地被人們所提及,相關(guān)的技術(shù)也在不斷的發(fā)展,各類高精度定位、傳感等技術(shù)得到了長(zhǎng)足的發(fā)展,而其中有一個(gè)冉冉升起的新星,那就是IMU技術(shù)。這個(gè)技術(shù)的出現(xiàn)彌補(bǔ)了GPS定位的不足,兩者
2021-07-09 09:18:203891 解決方案。 這一期我們將視線轉(zhuǎn)回國(guó)內(nèi),來(lái)看看國(guó)內(nèi)MEMS廠商旗下產(chǎn)品。 深迪半導(dǎo)體 SH系列 早在2017年深迪半導(dǎo)體作為國(guó)內(nèi)首家且批量生產(chǎn)消費(fèi)類6軸IMU廠商,主推了兩款SH200Q和SH200L打破了國(guó)外壟斷局面,通過(guò)與MEMS、ASIC晶圓制造及封測(cè)廠緊密合作,完成了一系
2021-09-06 10:16:534291 IMU提供相對(duì)定位信息,并不能提供所在具體位置信息,因此,高精度的IMU與GNSS導(dǎo)航系統(tǒng)二者組合使用,可以獲取絕對(duì)位置的信息,避免車(chē)輛在信號(hào)失效的情況下出現(xiàn)定位精度降級(jí)。
2022-09-30 12:39:44711 除了掃地機(jī)器人,IMU的用途十分廣泛,無(wú)論是遠(yuǎn)在天邊的衛(wèi)星、還是近在眼前的TWS耳機(jī),受益于IMU的基礎(chǔ)通用性,其應(yīng)用功能正在不斷豐富。
2022-10-31 15:27:222066 電子發(fā)燒友網(wǎng)報(bào)道(文/李寧遠(yuǎn))慣性測(cè)量單元一直都是MEMS領(lǐng)域中極為重要的一類產(chǎn)品,不管是在消費(fèi)電子、工業(yè)自動(dòng)化還是汽車(chē)自動(dòng)駕駛領(lǐng)域都有著廣泛的應(yīng)用。將加速度傳感器、陀螺儀等MEMS器件(有些還會(huì)
2022-11-02 07:20:061324 IMU通常包含一個(gè)3軸加速度計(jì)和一個(gè)3軸的陀螺儀,是測(cè)量物體三軸姿態(tài)角(或角度率)以及加速度的裝置。
2022-11-11 14:46:532789 直接使用慣性測(cè)量單元 (IMU)
2022-12-28 09:51:22750 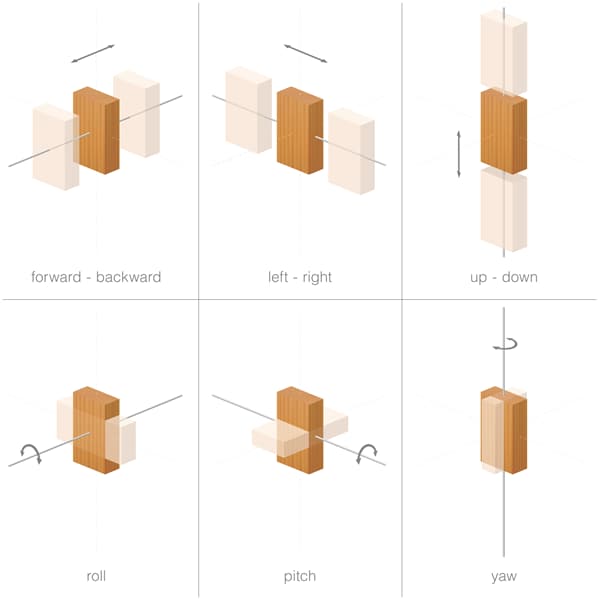
在閱讀論文 《A Robust and Easy to Implement Method for IMU Calibration without External Equipments》的時(shí)候了解
2023-05-24 17:28:59827 
AHRS和IMU的測(cè)量元件基本上相同,但由于AHRS的參考系統(tǒng)不同,AHRS相比IMU要多出個(gè)磁力計(jì)。在AHRS進(jìn)行運(yùn)動(dòng)軌跡和狀態(tài)監(jiān)測(cè)時(shí),由于陀螺儀時(shí)漂的問(wèn)題,在對(duì)運(yùn)動(dòng)過(guò)程中的旋轉(zhuǎn)角度進(jìn)行積分時(shí),會(huì)隨著時(shí)間推移而誤差越來(lái)越大,因此,需要磁力計(jì)及時(shí)對(duì)運(yùn)動(dòng)的地理方位角度進(jìn)行校準(zhǔn)。
2022-03-24 14:48:33812 
IMU原理慣性測(cè)量單元(IMU)通常指由3個(gè)加速度計(jì)和3個(gè)陀螺儀組成的組合單元,加速度計(jì)和陀螺儀安裝在互相垂直的測(cè)量軸上。低精度的IMU可以通過(guò)其他方式修正,GPS用于修正位置的長(zhǎng)期漂移,氣壓計(jì)用于
2021-09-17 17:30:551449 
圍繞航向姿態(tài)參考系統(tǒng)(英文簡(jiǎn)稱AHRS)和慣性測(cè)量單元(英文簡(jiǎn)稱IMU),來(lái)介紹一下,AHRS和IMU的在利用加速度傳感器、陀螺儀、磁力計(jì)等傳感器進(jìn)行慣性測(cè)量等方面的聯(lián)系與區(qū)別,以及它們各自的適用領(lǐng)域。
2022-02-15 16:35:201239 
電子發(fā)燒友網(wǎng)站提供《帶步進(jìn)器和IMU的M5Stick-C.zip》資料免費(fèi)下載
2023-06-20 11:08:360 的外參問(wèn)題經(jīng)常是IMU/GNSS與車(chē)體坐標(biāo)的外參、Lidar和Camera的外參、Lidar和Lidar的外參、Lidar和IMU/GNSS的外參。 離線外參標(biāo)定 1.1 IMU/GNSS與車(chē)體外參標(biāo)定 這個(gè)
2023-11-20 15:34:23420 
來(lái)源:華安機(jī)械 分析師張帆,謝謝 編輯:感知芯視界 萬(wàn)仞 獲取最新IMU行業(yè)研究報(bào)告,可在感知芯視界首頁(yè)對(duì)話框,回復(fù)“IMU”免費(fèi)下載。 【摘要】 ○預(yù)計(jì)高性能MEMS IMU市場(chǎng)規(guī)模最高達(dá)100
2023-11-23 09:19:11416 12月27日,導(dǎo)遠(yuǎn)電子獲得DEKRA德凱頒發(fā),國(guó)內(nèi)首張高精度定位IMU模組ISO 26262 ASIL B功能安全產(chǎn)品認(rèn)證證書(shū),標(biāo)志著導(dǎo)遠(yuǎn)IMU5104成為首個(gè)獲得ISO 26262功能安全認(rèn)證的車(chē)載IMU模組產(chǎn)品。
2023-12-27 17:07:27300 一般描述 M-G370PDF1是一個(gè)小的形狀因子慣性測(cè)量單元(IMU),具有6個(gè)自由度:三軸角速率和線性加速度,并提供了高穩(wěn)定性和高精度的測(cè)量能力與使用高精度補(bǔ)償技術(shù)。各種校準(zhǔn)參數(shù)被存儲(chǔ)在IMU
2024-01-11 17:00:110 的空白領(lǐng)域,為自動(dòng)化和穩(wěn)定領(lǐng)域做出自己的貢獻(xiàn)。今天就讓南山電子小編通過(guò)本文來(lái)了解愛(ài)普生(EPSON)開(kāi)發(fā)的新IMU產(chǎn)品M-G370PDS。
2024-03-21 10:11:1734 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論