簡單來說,姿態(tài)融合算法就是融合多種運(yùn)動傳感器數(shù)據(jù)(一般需要3軸加速度, 3軸陀螺儀或者3軸地磁感應(yīng)傳感器),通過數(shù)字濾波算法容錯補(bǔ)償,實(shí)現(xiàn)當(dāng)前姿態(tài)檢測。
2017-09-05 09:47:28 25312
25312 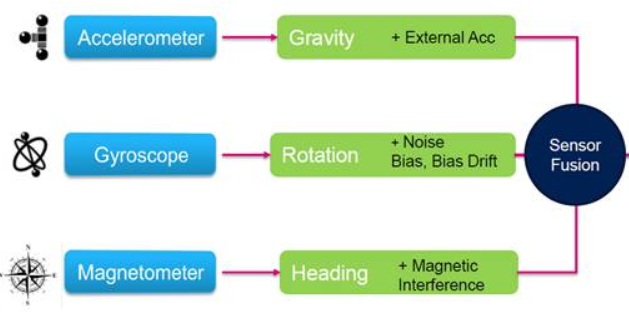
傳感器數(shù)據(jù)融合算法是一種將多個傳感器收集到的數(shù)據(jù)合并到一個一致和準(zhǔn)確的表示中的技術(shù)。這種算法的目的是提高數(shù)據(jù)精確性和可靠性,從而增強(qiáng)對環(huán)境或目標(biāo)的理解和控制。在本文中,我們將詳細(xì)討論傳感器數(shù)據(jù)融合算法
2023-12-15 10:28:05647 LSM6DSV16X 特性涉及到的是一種低功耗的傳感器融合算法(Sensor Fusion Low Power, SFLP).
低功耗傳感器融合(SFLP)算法:
2023-12-18 10:53:23485 
???? 所謂多傳感器信息融合(Multi-sensor Information Fusion,MSIF),就是利用計(jì)算機(jī)技術(shù)將來自多傳感器或多源的信息和數(shù)據(jù),在一定的準(zhǔn)則下加以自動分析和綜合,以
2018-11-07 10:53:06
好的傳感器的設(shè)計(jì)是經(jīng)驗(yàn)加技術(shù)的結(jié)晶。一般理解傳感器是將一種物理量經(jīng)過電路轉(zhuǎn)換成一種能以另外一種直觀的可表達(dá)的物理量的描述。而下文我們將對傳感器的概念、原理特性進(jìn)行逐一介紹,進(jìn)而解析傳感器的設(shè)計(jì)的要點(diǎn)。
2020-08-28 08:04:04
Microchip 的應(yīng)用筆記 AN1083 詳細(xì)地講述了一種無傳感器無刷直流電機(jī)的控制算法,其配套的開源算法采用 dsPIC? 數(shù)字信號控制器實(shí)現(xiàn),此前在淘寶購入了一塊基于 STM32 的無刷直流電機(jī)開發(fā)板,于是試著將該開源代碼移植至手上這塊開發(fā)板上。開發(fā)板如下圖所示: 因硬件平臺不...
2021-08-17 06:39:53
傳感器(Sensor)是一種常見的卻又很重要的器件,它是感受規(guī)定的被測量的各種量并按一定規(guī)律將其轉(zhuǎn)換為有用信號的器件或裝置。對于傳感器來說,按照輸入的狀態(tài),輸入可以分成靜態(tài)量和動態(tài)量。我們可以根據(jù)在
2018-11-19 15:06:53
出現(xiàn)GPS性能惡化的情況。所以,不能單一的將GPS定位信息作為列控系統(tǒng)的位置參數(shù)。 DR是車輛定位導(dǎo)航中采用的一種比較經(jīng)典的算法。它由測量航向的傳感器和測量距離的傳感器構(gòu)成。本方案中采用里程儀作為測量
2018-11-14 15:12:26
多傳感器融合系統(tǒng)具有哪幾個特點(diǎn)?信息融合系統(tǒng)的體系結(jié)構(gòu)主要有哪幾種?
2021-05-19 06:36:24
多傳感器信息融合問題,我剛剛查了百度,但是說的全是理論。我想問的是:1、多傳感器信息融合使用的處理器是單片機(jī)還是電腦?2、單片機(jī)外接幾個傳感器然后顯示出來算是多傳感器信息融合技術(shù)么??3、他能帶給我們什么好處?
2020-08-26 08:07:50
多傳感器信息融合技術(shù)
2012-08-15 20:09:31
導(dǎo)讀:所謂多傳感器信息融合(Multi-sensor Information Fusion,MSIF),就是利用計(jì)算機(jī)技術(shù)將來自多傳感器或多源的信息和數(shù)據(jù),在一定的準(zhǔn)則下加以自動分析和綜合,以完成
2018-11-07 11:06:00
多源融合導(dǎo)航 學(xué)習(xí)進(jìn)程~
2019-02-27 16:50:55
。當(dāng)多個傳感器位于同一位置時,可以創(chuàng)建令人興奮的新功能,并且可以交換和增強(qiáng)單個測量。在這些類型的設(shè)計(jì)中,傳感器可以實(shí)現(xiàn)高級功能,通常被稱為傳感器“融合”,提供新的和創(chuàng)新的功能。 傳感器融合算法已經(jīng)在
2019-05-23 08:00:00
接上集:
上次實(shí)驗(yàn)我們已經(jīng)完成多傳感器融合算法的設(shè)計(jì),本次實(shí)驗(yàn)注意完成改進(jìn)自適應(yīng)加權(quán)融合算法設(shè)計(jì)。
一、背景
通過利用溫室控制系統(tǒng)來管理溫室內(nèi)的各種設(shè)備并控制溫度、濕度,可以更好地探索和掌握環(huán)境因素
2024-01-06 12:18:08
本帖最后由 srxh 于 2015-12-7 23:19 編輯
講多傳感器數(shù)據(jù)融合技術(shù),可參考下,拓展我們的系統(tǒng)構(gòu)架、優(yōu)化系統(tǒng)算法主要內(nèi)容:數(shù)據(jù)融合算法、融合結(jié)構(gòu),貝葉斯推理、Dempster_Shasher算法、人工神經(jīng)網(wǎng)絡(luò)、模糊邏輯和模糊神經(jīng)網(wǎng)絡(luò)。老外的書,比較經(jīng)典!
2015-12-07 22:52:50
精度有待提高,本項(xiàng)目是基于多傳感器的融合算法,通過采用MEMS運(yùn)動傳感器,使用TI的C6000系列DSP實(shí)現(xiàn)對傳感器采集數(shù)據(jù)的融合,結(jié)合定位算法,實(shí)現(xiàn)對工業(yè)機(jī)器人的精確定位,提高工業(yè)機(jī)器人的重復(fù)定位精度和絕對定位精度。
2015-09-10 11:13:49
項(xiàng)目名稱:一種高效的協(xié)議融合解決方案試用計(jì)劃:申請理由:現(xiàn)在市面上的傳感器類型很多,所以導(dǎo)致了通信協(xié)議的種類很多,例如:串口,I2C,485等,把這些協(xié)議通過NXP處理器進(jìn)行協(xié)議融合,對數(shù)據(jù)進(jìn)行統(tǒng)一
2017-07-03 18:30:50
融合算法的評估和驗(yàn)證實(shí)驗(yàn),證明了此平臺的可靠性。通過采用本平臺可大大簡化實(shí)驗(yàn)過程,為下一步傳感器信息融合研究奠定了可靠的基礎(chǔ)。[hide] [/hide]`
2011-12-31 10:48:28
`做四軸飛行器有一段時間了,現(xiàn)在分享一些我對于卡爾曼濾波算法用于兩個傳感器融合的一些心得:卡爾曼濾波 實(shí)現(xiàn)性最優(yōu)解的一種求解算法,但是他必須根據(jù)建模的預(yù)測值和傳感器數(shù)據(jù)采集的測量值 才能夠進(jìn)行
2015-06-12 15:11:05
本帖最后由 sda12138 于 2024-1-6 12:00 編輯
接上集:
上次實(shí)驗(yàn)我們已經(jīng)完成個人中心的設(shè)計(jì),本次實(shí)驗(yàn)主要完成內(nèi)容是完成多傳感器融合算法的設(shè)計(jì)。
一、背景
在智慧農(nóng)業(yè)中農(nóng)
2023-12-26 20:59:02
融合的關(guān)鍵每一種MEMS運(yùn)動傳感器都有其自身的優(yōu)點(diǎn)和缺陷,筆者把這些優(yōu)缺點(diǎn)整理在表一中。要達(dá)到精益求精的傳感數(shù)據(jù),除了傳感器本身的精度之外,通過復(fù)雜的傳感器融合軟件將來自各種傳感器的輸入組合在一起,產(chǎn)生
2014-04-25 15:07:45
什么是傳感器融合? #motion-sensor #inemo#sensor-fusion#sensor-fusion #inemo以上來自于谷歌翻譯以下為原文 What is sensor
2018-12-10 16:43:27
多傳感器信息融合技術(shù)綜合了概率統(tǒng)計(jì)、信號處理、人工智能、控制理論等多個學(xué)科的最新科研成果,為機(jī)器人精確、全面、實(shí)時地感知各種復(fù)雜的、動態(tài)的、不確定的未知環(huán)境提供了一種先進(jìn)的技術(shù)手段。在研究基于多
2020-08-18 07:43:38
本文基于估計(jì)理論和模糊系統(tǒng)理論,提出了一種多傳感器多回波模糊一概率交互作用的數(shù)據(jù)關(guān)聯(lián)濾波算法,以解決密集雜波干擾環(huán)境中多傳感器跟蹤機(jī)動目標(biāo)的數(shù)據(jù)關(guān)聯(lián)問題.模糊關(guān)聯(lián)度和關(guān)聯(lián)概率共同組成了各有效回波的加權(quán)系數(shù),彌補(bǔ)了概率數(shù)據(jù)關(guān)聯(lián)濾波方法(PDAF)的不足.提高了雜波環(huán)境中機(jī)動目標(biāo)的跟蹤性能.
2020-04-24 06:09:10
一、卡爾曼濾波九軸融合算法stm32嘗試1、Kalman濾波文件[.h已經(jīng)封裝為結(jié)構(gòu)體]Kalman.h2、I2C總線代碼[這里把MPU和HMC掛接到上面,通過改變SlaveAddress的值來
2022-02-10 07:18:25
本系統(tǒng)所設(shè)計(jì)的機(jī)器人的主要任務(wù)是在未知環(huán)境下依靠多傳感器信息,運(yùn)用D-S數(shù)據(jù)融合算法,提供與環(huán)境有關(guān)的關(guān)于系統(tǒng)狀態(tài)的足夠的與可靠的信息,使機(jī)器人能夠自主規(guī)劃路徑、躲避障礙物,最終向目標(biāo)靠近
2018-11-01 15:08:27
評估,驗(yàn)證了所設(shè)計(jì)方法的有效性和實(shí)用性。 1 多傳感器平臺搭建 雷達(dá)和紅外傳感器是目前常用的兩種目標(biāo)探測和跟蹤傳感器,采用雷達(dá)為主、紅外成像傳感器探測為輔的信息融合系統(tǒng)進(jìn)行目標(biāo)跟蹤能夠使系統(tǒng)降低
2018-12-05 15:16:23
摘要:本文提出了一種傳感器管理系統(tǒng)框架,給出了基于多Agent的解決方案。該結(jié)構(gòu)通過多個Agent間的相互協(xié)商來實(shí)現(xiàn)傳感器任務(wù)的分配,較好地克服了在融合中心存在的缺陷。并在此基礎(chǔ)上著重探討各
2018-11-14 15:50:32
0 引言 現(xiàn)代工業(yè)生產(chǎn)以綜合、復(fù)雜、大型、連續(xù)為特點(diǎn),采用大量傳感器來監(jiān)測和控制生產(chǎn)過程。多傳感器系統(tǒng)的出現(xiàn)導(dǎo)致信息量劇增,采用信息融合技術(shù)可更有效地利用信息資源。在復(fù)雜的工業(yè)控制系統(tǒng)中,控制
2018-11-12 10:49:55
本文介紹基于Android的多傳感器信息融合技術(shù)在氣溶膠自動化檢測中的應(yīng)用。
2021-05-11 06:22:08
。當(dāng)多個傳感器位于同一位置時,可以創(chuàng)建令人興奮的新功能,并且可以交換和增強(qiáng)單個測量。在這些類型的設(shè)計(jì)中,傳感器可以實(shí)現(xiàn)高級功能,通常被稱為傳感器“融合”,提供新的和創(chuàng)新的功能。 傳感器融合算法已經(jīng)在
2019-07-12 06:45:44
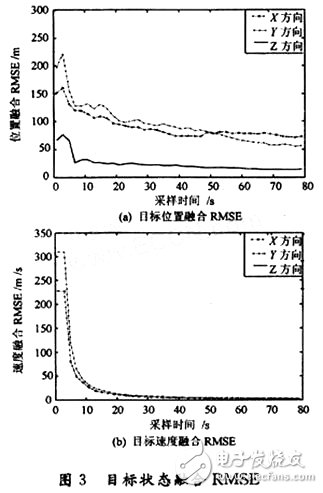
采用CarlsON 最優(yōu)數(shù)據(jù)融合準(zhǔn)則, 將基于Kalman 濾波的多傳感器狀態(tài)融合估計(jì)方法應(yīng)用到雷達(dá)跟蹤系統(tǒng)。仿真實(shí)驗(yàn)表明,多傳感器Kalman 濾波狀態(tài)融合估計(jì)誤差小于單傳感器Kalman 濾波得出的狀態(tài)估計(jì)誤差,驗(yàn)證了方法對雷達(dá)跟蹤的有效性。
2020-04-06 07:42:16
數(shù)據(jù)融合方式消除溫度誤差。構(gòu)建了多傳感器融合模型,選用徑向基函數(shù)(Radial Basis Function,RBF)網(wǎng)絡(luò)對磁敏傳感器和溫度傳感器的輸出進(jìn)行融合,并通過實(shí)驗(yàn)驗(yàn)證了該方法的有效性。檢測系統(tǒng)的準(zhǔn)確度和穩(wěn)定性有了明顯的提高。
2020-03-06 08:16:48
什么是無線傳感器網(wǎng)絡(luò)?如何去實(shí)現(xiàn)一種無線傳感器網(wǎng)絡(luò)?
2021-05-25 07:00:30
無線傳感器網(wǎng)絡(luò)在ITS中有哪些應(yīng)用?如何去設(shè)計(jì)一種無線傳感器網(wǎng)絡(luò)節(jié)點(diǎn)?
2021-05-25 06:25:15
作者:Joy Yang1.什么是姿態(tài)融合算法簡單來說,姿態(tài)融合算法就是融合多種運(yùn)動傳感器數(shù)據(jù)(一般需要3軸加速度, 3軸陀螺儀或者3軸地磁感應(yīng)傳感器),通過數(shù)字濾波算法容錯補(bǔ)償,實(shí)現(xiàn)當(dāng)前姿態(tài)檢測
2019-07-19 06:47:49
接近傳感器是如何定義的?接近傳感器有哪些應(yīng)用?接近傳感器的一種新型應(yīng)用是什么?
2021-06-16 07:37:50
本文介紹了幾類常用的無線傳感器網(wǎng)絡(luò)數(shù)據(jù)融合算法,并比較了其優(yōu)缺點(diǎn)。
2021-06-03 06:41:59
[3]提出一種基于決策數(shù)據(jù)融合的路由算法AFST(Adaptive Fusion Steiner Tree),它通過權(quán)衡融合代價與傳輸代價,動態(tài)決定數(shù)據(jù)相遇點(diǎn)是否進(jìn)行數(shù)據(jù)融合,可以進(jìn)一步減少網(wǎng)絡(luò)的能耗
2023-09-21 08:29:44
信息。其次,鏈頭節(jié)點(diǎn)為瓶頸節(jié)點(diǎn),它的存在至關(guān)重要,若它的能量耗盡則有關(guān)路由將會失效。再次,較長的鏈會造成較大的傳輸時延。2.2 分布式數(shù)據(jù)融合算法可以將一個規(guī)則傳感器網(wǎng)絡(luò)拓?fù)鋱D等效于一幅圖像,獲得一種將小波
2010-03-23 14:48:27
無線傳感器網(wǎng)絡(luò)就是一種RGS系統(tǒng)(遠(yuǎn)程地面傳感器系統(tǒng)),它是一種利用多種傳感器作為綜合情報采集元件,進(jìn)行數(shù)據(jù)融合、編碼等處理后,發(fā)送給指揮中心,處理還原后在監(jiān)控平臺顯示出來的探測系統(tǒng)。它集傳感器技術(shù)
2019-10-31 08:30:04
本文參考IEEE 802.16d物理層幀結(jié)構(gòu),提出了一種低復(fù)雜度的幀同步和定時同步聯(lián)合算法,該算法可在FPGA上利用較少資源來實(shí)現(xiàn)。
2021-05-06 06:23:10
EyeQ4、EyeQ5產(chǎn)品計(jì)劃已發(fā)布,其中EyeQ4將開始使用多攝像頭方案。預(yù)計(jì)未來通過芯片升級和算法優(yōu)化,Mobileye的芯片算法將融合更多傳感器,將推出多目攝像頭+毫米波雷達(dá)+激光雷達(dá)的解決方案
2020-07-31 06:35:12
,設(shè)計(jì)人員可以轉(zhuǎn)而使用 Bosch Sensortec 的兩款方向傳感器器件。 這些器件提供了一種比定制傳感器融合設(shè)計(jì)更簡單的替代方案,通過現(xiàn)成的解決方案加快傳感器融合功能的開發(fā)。傳感器融合的需求感知
2017-04-07 15:13:53
上實(shí)現(xiàn)算法的項(xiàng)目經(jīng)驗(yàn),有在TI DSP/ARM平臺上實(shí)現(xiàn)經(jīng)驗(yàn)。 7.熟悉OpenCL/CUDA,熟悉常用信號處理,多傳感器融合算法者優(yōu)先。有意向可以加我QQ318421749南京仁獵025-58859889-803
2016-10-21 11:14:36
由于雷達(dá)探測存在盲區(qū),低空與超低空飛行的入侵目標(biāo)給雷達(dá)防御系統(tǒng)帶來困難與威脅。基于GPS技術(shù)、多傳感器技術(shù)、網(wǎng)絡(luò)技術(shù)及單片機(jī)技術(shù)設(shè)計(jì)出一種分布式多傳感器探測節(jié)點(diǎn),把遠(yuǎn)程分布的多傳感器探測節(jié)點(diǎn)所探測
2020-04-14 07:50:24
摘要:文章分析了目前一些數(shù)據(jù)融合算法中對先驗(yàn)信息要求苛刻,定義數(shù)據(jù)間支持度中門限預(yù)先設(shè)定對融合結(jié)果的不利影響,提出了一種實(shí)用的數(shù)據(jù)融合算法,該算法中定義了一種新
2009-01-18 23:20:55 16
16 該文提出了改善傳感器測量穩(wěn)定性的一種新方法。該方法的基本思路是將影響傳感器輸出穩(wěn)定性的因子作為傳感器融合系統(tǒng)的輸入模式,基于系統(tǒng)辨識理論實(shí)現(xiàn)融合算法。實(shí)驗(yàn)結(jié)果
2009-06-19 15:11:3318 多傳感器信息融合位置級融合算法中, 測量融合(Measurement fusion) 算法是最優(yōu)的。本文證明了測量融合算法的估計(jì)方差由系統(tǒng)的“測量函數(shù)”決定。該函數(shù)值越大, 系統(tǒng)的融合估計(jì)方差
2009-07-02 09:05:4210 將多傳感器對某一狀態(tài)的測量結(jié)果分組, 針對每組測量變量的算術(shù)平均值, 依據(jù)極大似然原理, 提出了多傳感器分組加權(quán)融合算法. 通過對各組傳感器測量值的方差進(jìn)行估計(jì),從而對每
2009-07-03 09:35:0614 為了對隨機(jī)擾動環(huán)境中得到的管道壁厚測量數(shù)據(jù)進(jìn)行穩(wěn)健融合估計(jì), 提出了一種多傳感器測量數(shù)據(jù)的切尾加權(quán)融合算法。利用數(shù)據(jù)探測技術(shù)中的切尾均值概念構(gòu)造最優(yōu)加權(quán)因子, 從而
2009-07-04 09:17:206 討論了C. Beugnon 等提出的自適應(yīng)航跡融合算法,分析表明該算法中隱含一個不正確的假設(shè),即傳感器航跡與全局航跡之間互不相關(guān). 鑒于此,提出一種新的改進(jìn)算法,該算法修正了原算法中
2009-07-06 09:51:373 本文基于最優(yōu)估計(jì)理論,提出了一種多傳感器分散估計(jì)融合算法,以解決測量噪聲干擾下參數(shù)估計(jì) 問題。該方法不要求知道測量數(shù)據(jù)的先驗(yàn)知識,在減少測量誤差方面比傳統(tǒng)的集中估計(jì)
2009-07-10 15:32:2920 針對多傳感器觀測環(huán)境下帶乘性噪聲系統(tǒng)的逆向最優(yōu)濾波與反褶積融合估計(jì)問題, 本文提出了1 種基于極大似然準(zhǔn)則的最優(yōu)融合算法。該算法中各單傳感器間并行計(jì)算, 并且融合
2009-07-11 16:27:5510 本文提出了一種多傳感器單目標(biāo)空間位置融合處理算法, 利用該算法可以獲取飛行目標(biāo)的最佳運(yùn)動軌跡1 經(jīng)模擬計(jì)算, 表明該算法是對飛行目標(biāo)測量數(shù)據(jù)進(jìn)行融合處理的一種較為理
2009-07-13 11:27:4221 本文介紹多目標(biāo)跟蹤的用多維數(shù)據(jù)互聯(lián)的多傳感器融合算法的發(fā)展。這項(xiàng)工作是受大規(guī)模監(jiān)視問題的推動,在這種監(jiān)視問題中,來自具有不同采樣間隔(電子掃描陣(ESD)雷達(dá))的異步
2009-07-13 11:59:1911 在實(shí)際系統(tǒng)中,常用的數(shù)據(jù)融合方法是基于擴(kuò)展的卡爾曼濾波算法的融合算法,但是這種融合算法的跟蹤精度并不是很高. 通過對濾波跟蹤型數(shù)據(jù)融合的研究,提出了基于轉(zhuǎn)換測量值卡爾
2009-07-14 11:28:0015 通過構(gòu)建一個多傳感器信息融合算法的仿真測試系統(tǒng),模擬了多種實(shí)際戰(zhàn)場環(huán)境,對不同信息融合算法的測試結(jié)果的統(tǒng)計(jì)與分析I綜合性能評估領(lǐng)域已有的研究成果,建立了完整的多
2009-07-16 14:07:4819 針對分布式多傳感器數(shù)據(jù)融合系統(tǒng),提出了一種多傳感器異步航跡融合算法。由于不同傳感器的采樣時間各不相同,融合算法首先利用最小二乘法將局部航跡統(tǒng)一到融合中心的融合
2009-08-07 09:47:5812 無線傳感器網(wǎng)絡(luò)中采集的數(shù)據(jù)存在著較大的冗余與誤差,造成能量消耗過多,并且影響數(shù)據(jù)的可靠性。針對這個問題提出一種基于定向擴(kuò)散與分批估計(jì)的數(shù)據(jù)融合算法,對監(jiān)測同
2009-09-01 09:55:0511 現(xiàn)有的異步航跡融合算法大都采用無全局信息反饋的設(shè)計(jì)框架,并且忽略各異步傳感器局部預(yù)測航跡誤差間的相關(guān)性,加之考慮上述相關(guān)性的最優(yōu)整體航跡融合算法的實(shí)時性難以被
2009-11-09 14:30:5714 移動代理被認(rèn)為是無線傳感器網(wǎng)絡(luò)中解決數(shù)據(jù)融合的有效方法,但代理訪問節(jié)點(diǎn)的次序以及總數(shù)對算法有較大影響,為此該文提出一種基于Bayes 序貫估計(jì)的移動代理數(shù)據(jù)融合算法.該
2009-11-20 16:34:4121 基于COM的數(shù)據(jù)融合算法測試平臺開發(fā)
建立了一個基于COM技術(shù)的數(shù)據(jù)融合算法測試平臺,把數(shù)據(jù)融合算法封裝到組件中,并定義了一種COM接口規(guī)范,為算法調(diào)用提供了一
2010-02-22 15:45:418 摘要:在基于卡爾曼濾波及其一些改進(jìn)算法中,由于測量方差預(yù)先設(shè)定,從而導(dǎo)致濾波發(fā)散和信息資源的浪費(fèi),為此提出了一種動態(tài)加權(quán)下測量方差時變的多傳感器融合算法。該
2010-12-30 19:54:5827 一種改進(jìn)的多傳感器加權(quán)融合算法
引言
多傳感器數(shù)據(jù)融合是近幾年迅速發(fā)展的一門信息綜合處理技術(shù),它將來自多傳感器或是多源的信息和數(shù)據(jù)進(jìn)行綜合
2009-12-12 10:32:351983 Particle Swarm Optimization, BPSO)方法的多傳感器特 征融合算法。利用新的基于概率密度估計(jì)的相對微
2011-02-25 15:32:1938 聚類算法及聚類融合算法研究首先對 聚類算法 的特點(diǎn)進(jìn)行了分析,然后對聚類融合算法進(jìn)行了挖掘。最后得出聚類融合算法比聚類算法更能得到很好的聚合效果。
2011-08-10 15:08:0233 針對無線傳感器網(wǎng)絡(luò)的節(jié)點(diǎn)能量有限,且在進(jìn)行信息傳輸時存在數(shù)據(jù)沖突、傳輸延時等問題,提出并設(shè)計(jì)了基于最大生存周期的無線傳感器網(wǎng)絡(luò)數(shù)據(jù)融合算法。該算法將整個網(wǎng)絡(luò)中的節(jié)
2013-05-06 11:41:3836 無人車在運(yùn)行過程中,需要利用多傳感器系統(tǒng)對周圍道路環(huán)境進(jìn)行觀測,但這些傳感器獲取的數(shù)據(jù)信息存在著超載,丟失或不精確等問題,則需采用數(shù)據(jù)融合技術(shù)對所獲數(shù)據(jù)加以優(yōu)化處理。本文基于無人車的多傳感器系統(tǒng),對加權(quán)平均數(shù)據(jù)融合算法進(jìn)行了研究,符合無人車運(yùn)行環(huán)境下融合層次的要求,在實(shí)際的數(shù)據(jù)融合處理中具有很高的可行性。
2015-12-18 16:03:0517 一種改進(jìn)的多傳感器信息融合算法_夏菽蘭
2017-01-03 15:24:450 基于UKF的變采樣率多異質(zhì)傳感器異步數(shù)據(jù)融合
2017-01-08 15:59:094 基于蟻群優(yōu)化的無線傳感器網(wǎng)絡(luò)數(shù)據(jù)融合算法_李麗
2017-01-07 19:00:392 無線傳感器網(wǎng)絡(luò)數(shù)據(jù)融合算法的改進(jìn)與實(shí)現(xiàn)_邊鵬飛
2017-01-19 21:54:151 基于DCT的遙感圖像融合算法_曹流
2017-03-19 19:07:171 基于模糊熵的多傳感器加權(quán)融合算法_王晶晶
2017-03-22 09:06:400 姿態(tài)融合算法就是融合多種運(yùn)動傳感器數(shù)據(jù)(一般需要3軸加速度,3軸陀螺儀或者3軸地磁感應(yīng)傳感器),通過數(shù)字濾波算法容錯補(bǔ)償,實(shí)現(xiàn)當(dāng)前姿態(tài)檢測。
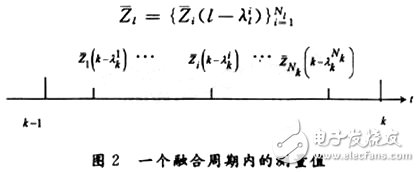
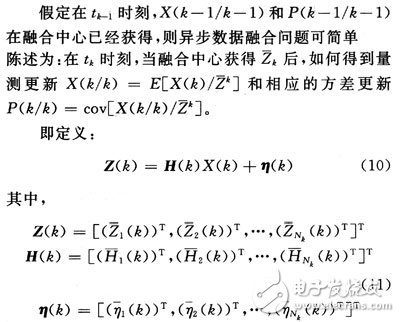
2017-09-18 18:33:4611 假設(shè)采用N個傳感器對目標(biāo)進(jìn)行觀測,Ti是第i個傳感器的采樣間隔,且在每個時間間隔[(k-1)T,kT](T為融合周期)內(nèi)各傳感器共產(chǎn)生了Nk個量測,在該時間間隔內(nèi),某個傳感器可能產(chǎn)生一個或幾個量測,nik為傳感器i提供量測的數(shù)目,則有:
2018-07-25 13:20:001953 
針對粒子濾波中存在粒子質(zhì)量低和粒子貧化的問題,提出了一種基于智能粒子濾波的多傳感器信息融合算法。該算法分為兩個模塊,首先,將多傳感器數(shù)據(jù)發(fā)送給相應(yīng)的粒子濾波計(jì)算模塊,以優(yōu)化粒子分布為目的更新建議分布
2017-12-08 17:08:371 2020第六屆中國硬件創(chuàng)新大賽全國總決賽將于11月15日9:00在深圳會展中心舉辦,大賽組委會為大家?guī)砜倹Q賽入圍項(xiàng)目磁傳感器件及融合算法模塊的專欄文章《東方微電創(chuàng)始人吳建得:持續(xù)在磁傳感器件及融合算法
2020-10-31 09:48:082147 一種基于FPGA動態(tài)可重構(gòu)的圖像融合算法。該方法對小波分解后的圖像低頻子帶采用平均融合算子處理,在高頻子帶的融合中依據(jù)小波系數(shù)樹狀結(jié)構(gòu)特點(diǎn),提出了一種新的自適應(yīng)融合方法,最后經(jīng)過小波逆變換得到融合
2021-02-02 17:12:598 潛指紋紫外偏振圖像由紫外強(qiáng)度圖像與偏振度參量圖像融合而成,可實(shí)現(xiàn)澘指紋準(zhǔn)確檢測與識別,然而目前無法選擇最優(yōu)偏振參量表征目標(biāo)特性。在現(xiàn)有偏振圖像融合算法基礎(chǔ)上,提岀一種紫外偏振圖像模糊自適應(yīng)融合算法
2021-03-17 14:44:316 提出一種基于rPGA動態(tài)可重構(gòu)的圖像融合算法。該方法對小波分解后的圖像低頻子帶采用平均融合算子處理,在商頻子帶的融合中依據(jù)小波系數(shù)樹狀結(jié)構(gòu)特點(diǎn),提出了一種新的自適應(yīng)融合方法,最后經(jīng)過小波逆變換
2021-03-19 16:36:5513 因?yàn)槎?b class="flag-6" style="color: red">傳感器的使用會產(chǎn)生大量需要處理的數(shù)據(jù),因此通常通過融合算法來對數(shù)據(jù)進(jìn)行優(yōu)化。不同傳感器采集到的信息可能相互之間可能會不同甚至是有矛盾,使用融合算法可以幫我們弄懂如何保證系統(tǒng)能夠準(zhǔn)確處理這些數(shù)據(jù),使系統(tǒng)最終做出及時、正確的決策,這非常重要。
2022-03-30 16:29:3718296 
UM1866_基于STM32Cube的傳感器融合算法和地磁傳感庫的X-CUBE-MEMS1擴(kuò)展包入門
2022-11-22 19:24:216 最近在做特征級別的感知結(jié)果融合算法。我的工作目的,是要將多種不同傳感器的感知結(jié)果,通過一定的機(jī)制融合起來,得到融合后的感知結(jié)果。
2023-05-29 09:26:48420 
多傳感器數(shù)據(jù)融合是一個綜合處理多傳感器數(shù)據(jù)的過程,以提高對環(huán)境或目標(biāo)的感知和解釋能力。在這個過程中,各種數(shù)據(jù)融合算法起著至關(guān)重要的作用。本文將深入探討多傳感器數(shù)據(jù)融合算法中最關(guān)鍵的方面。 一、傳感器
2023-12-13 11:00:01262
 電子發(fā)燒友App
電子發(fā)燒友App






















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論