 電子發燒友App
電子發燒友App


作者:Kaustubh Gandhi,Bosch Sensortec軟件產品經理,與Bosch Sensortec傳感器數據融合軟件系統工程師Amithash Kankanallu Jagadish合著
簡介
無論是智能手機、可穿戴設備、虛擬現實耳機,還是機器人吸塵器,當今用戶都期望并要求這些設備始終按照指令運行,并平穩、準確地適應不斷變化的周圍環境。這需要精確的感測俯仰、滾轉和航向方向,而這些則是通過從設備內置的加速度計、陀螺儀和磁力計收集的數據融合實現的。
通常在現實世界中,事物永遠不會像其看起來那么簡單,例如,準確確定航向(觀測)方向便是一項巨大挑戰,因為磁力計測量受到附近多個物體的負面影響。這些干擾性磁場影響,通常稱為硬鐵和軟鐵扭曲,可能由位于設備本身內的各種元件和用戶周圍環境中的外部磁性物體引起。
本文旨在深入洞察和理解在當今電子消費設備中獲得可靠傳感器數據所需的有效設計技術和軟件解決方案,并提高用戶對最終產品的滿意度。本文將提供強大傳感器數據融合技術的示例,例如基于在標準使用期間獲得的陀螺儀信號,對估算磁力計偏移加以利用,及其對用戶相關特征(例如行人和頭部跟蹤)的影響。
磁力挑戰
您是否曾由于智能手機導航應用程序給出了錯誤的指示,而找錯了環島出口?使用虛擬現實耳機時,您是否經歷過突然的眩暈?或者您的“智能”機器人吸塵器是否一再被卡在角落里?這些問題中的大多數,至少部分,是由不精確的慣性傳感器數據融合導出的不正確航向信息所造成的。那么,為什么最先進的高精度傳感器仍然會記錄不準確的信息,并且產生如此大的偏差?
在實驗室外,所謂的地球恒定磁場的剛性磁線不斷被各種物體修改,如門框、桌子、椅子和其他金屬物品。基于其特定磁特性,這些物體通過稱為硬鐵和軟鐵扭曲的現象改變其周圍的磁場。
圖1:羅盤誤差的來源:外部磁場
諸如NdFeB、AlNiCo等硬磁材料(“硬鐵”)引起高殘余B場或“磁記憶”,而軟磁材料(“軟鐵”)則通常是諸如鐵(Fe)、鎳(Ni)等材料及其合金。
當磁力計用于設備中時,硬鐵扭曲由產生磁場的物體造成,例如揚聲器內的磁鐵,由此導致傳感器輸出中稱為“恒定偏移”的偏差,然后需要對其進行補償。另一方面,軟鐵扭曲則是由“被動”影響或扭曲其周圍磁場但自身不一定產生磁場的物體造成的,例如存儲卡插槽、電池、無線天線、門窗框架和各種其他周圍環境中的標準對象。這種類型的扭曲改變了磁球的實際形狀,并且很大程度上取決于材料相對于傳感器和磁場的定位。
如圖2所示,在典型的室內區域,由于一般物體引起的磁場扭曲,羅盤方向變化很大,即羅盤的紅色“北”針指向各個方向。

圖2:典型室內區域傳感器讀數(磁力計)的變化
因此,補償硬鐵和軟鐵扭曲對于獲得有意義的磁力計讀數至關重要。這種補償需要在設備設計期間進行復雜的程序,并且在實際使用期間將結果結合到傳感器的軟件中,如下文中的進一步描述。
接受扭曲
以下系統方法可用于補償影響磁力計讀數的失真:
·使用軟鐵矩陣在設計階段進行補償
·通過標準“八字形動作”在使用中校準軟件
·通過“自然使用動作”智能校準軟件
使用軟鐵矩陣在設計階段進行補償
來自位于終端設備(例如智能手機)內部部件的軟鐵扭曲是恒定的,因此可以通過使用一次性解決方案來補償。這種補償需要所謂的“軟鐵補償矩陣”(SIC Matrix),對此,設計者在設備中具有更廣泛的布局選項。這些補償后傳感器的讀數具有明顯更高的精度,與未補償讀數相比達±2°,其中誤差范圍可以輕松達到±10°。校準通過3D線圈系統(亥姆霍茲線圈)進行,該線圈系統由在同一軸上對中的兩個螺線管電磁鐵組成,可抵消這些干擾性外部磁場,以提供“清潔”的磁環境。帶有慣性傳感器的設備被放置在此清潔環境中,并接受測量,以創建磁力計的原始數據記錄,然后將其輸入數據驅動工具,生成SIC矩陣。之后,該SIC矩陣將合并至軟件驅動器中,并永久補償影響磁力計數據的設備內軟鐵扭曲。
這種方法可以在實驗室條件下估算軟鐵效應,當然,使用過程中的變化和附加設備的影響無法得到補償。盡管如此,這依然是一種非常有效的設備內部件校準技術,強烈建議于設計階段在傳感器制造商專家的幫助下準確生成SIC矩陣并加以應用。
圖3:3D(亥姆霍茲)線圈,用于設備內磁力計校準
遺憾的是,在通常情況下,當應用于實際PCB時,實驗室校準結果無法準確工作,因為其中會生成被稱為“禁區”的區域,使這些裝置的準確性極度降低,以致完全無法使用。
Bosch Sensortec的3D軟鐵補償技術大大減少了這一“禁區”現象。例如,如果在距離NFC天線僅9mm處測量傳感器數據失真,在補償之前,最大航向誤差為8°,而在補償之后,所有海拔高度的最大誤差僅為1.5°。

通過“八字形動作”在使用中進行校準
此方法并非實驗室密集型,但只需通過在已知的磁性清潔環境中移動設備(例如智能手機)便可收集大量有價值的數據。理想的動作是指沿最大定位范圍測量磁性的運動,由此幫助估算所有情況下的磁偏差。因此,該技術通常使用覆蓋所有三個軸向的八字形運動來執行。
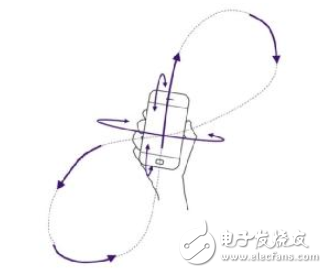
圖6:令智能手機在3D空間中以八字形圖案移動
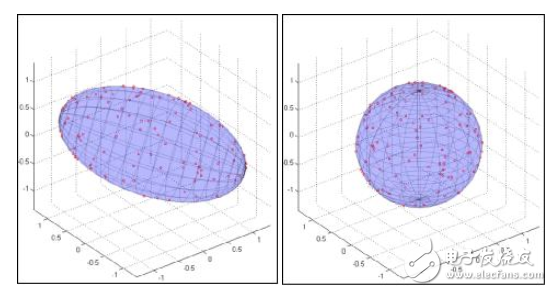
該圖案可描繪出由磁性扭曲而變形的磁球部分。從獲得的坐標可以非常精確地估算磁球變形,以導出所需的校準系數。使用該方法估算的偏移將用于補償來自外部環境的硬鐵扭曲。
圖7:沒有偏移補償的傳感器數據
圖8:有偏移補償的傳感器數據
相當多的智能手機設備和操作系統制造商仍然依賴于這種八字形校準技術。出于校準目的,當今的智能手機經常提示最終用戶使用地圖應用程序在空間中進行八字形動作。但是,通過在3D空間中移動設備來創建此模式可能需要10秒以上,并且如果用戶將其手機用于較為緊急的目的(例如玩動作游戲),或執行對安全性要求較高的任務(例如在汽車內使用智能手機導航),那么暫停游戲會讓玩家十分掃興,而將注意力從駕駛汽車轉至校準設備則會造成安全風險。
盡管如此,還是通常建議用戶使用這種方法,因為它可以提供可靠的結果。但是,只有當用戶實際上能夠花時間重新校準設備,并且物理上允許通過在3D空間中以八字形移動設備時,此方法才適用。
通過“自然使用動作”進行智能校準
盡管八字形動作非常適合智能手機,但在物理上也許并不可行,并且可能對其他類型的設備來說,執行起來會比較困難或奇怪,例如腕部可穿戴設備、增強/虛擬現實耳機、入耳式可穿戴設備和機器人吸塵機。
磁力計校準背后的基本理念在于通過估算磁球與地球磁場矢量的偏差作為半徑來估算磁力計的偏移。為了降低校準所需的時間并以更小、更自然的運動校準設備,可使用陀螺儀信號輔助磁場傳感器的校準。
校正后的陀螺儀信號相對于最后磁場值定義其旋轉。一旦確定了新的磁場值,便會將其饋入擴展卡爾曼濾波器(EKF)。EKF估計磁力計偏移和磁場矢量的大小(半徑)。磁強計干擾檢測基于卡爾曼濾波器的殘差。
由于這些快速傳統型磁力計校準器利用陀螺儀數據,因此在重新校準過程中被校準的設備必須處于靜止狀態,即陀螺儀本身在校準期間不會漂移。然而,對于較新的“體戴式”裝置而言,這并不可行,因為這些時刻、并且是在較長的時間段內處于使用和運動中。
定義了這個問題后,Bosch Sensortec專注于通過開發“自然使用型”快速磁力計校準軟件來迎接挑戰。該軟件針對每種不同類型設備的典型用途獲得配置,即使這些處于恒定運動中。其目標在于確保即使用戶不必做出任何特定、有意的動作,設備中的慣性傳感器也可以自動且準確地校準,以實現在變化環境中的使用。
以下將介紹可穿戴設備、控制器和耳機的幾個示例:
腕部可穿戴設備
對于佩戴腕表或健身追蹤器的人來說,經常瀏覽設備、查看計算的步數或燃燒的卡路里、閱讀消息通知,或只是查看時間再自然不過了。由于大多數用戶不知道自己位于會影響其磁力計的材料附近,或者甚至在其設備中安裝了磁力計,因此設備需要在不知情的情況下在后臺執行校準。此外,如果用戶必須在空中揮手以校準“智能腕表”,看起來會很奇怪。因此,Bosch Sensortec磁力計校準器可在后臺靜音工作,無論何時用戶查看手腕,都可以補償磁力計偏移。
統計學已經證明,只需做出兩三個“查看”設備的動作,這種用于可穿戴設備的快速磁力計校準器便可估算出偏移,而且以典型且較低的數據速率運行。
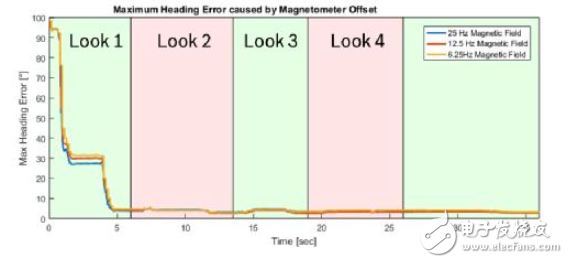
圖9:腕部可穿戴設備中航向誤差的系統消除
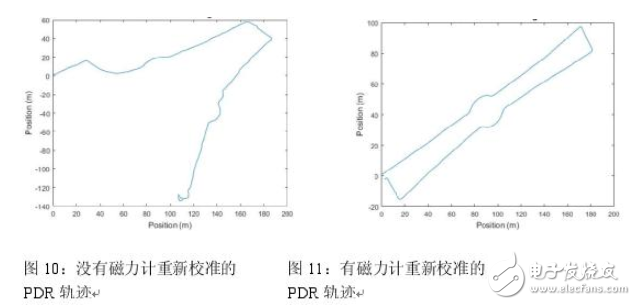
該校準程序對室內和室外導航應用都很有效。例如,使用九軸慣性傳感器估算用戶位置和步行軌跡的PDR(行人航位推算)應用程序在激活校準器時具有相當高的精度。下面的例子清楚地表明,雖然兩個軌跡估算都是從0.0開始,但在約為2x200m的短行走距離中未校準設備的累積航向誤差導致的位置誤差超過43%。
虛擬和增強現實耳機
與此類似,現實中無法要求虛擬現實耳機的用戶經常以八字形運動移動其頭部,尤其是佩戴耳機時。特別是對于耳機,由于大腦會記錄用戶實際運動和在屏幕上看到的視覺圖像之間的對準偏差,即使相對較小的航向和水平傾斜偏差也可能導致非常不愉快的眩暈癥狀。
Bosch Sensortec的耳機磁力計校準器校準磁力計,同時用戶可自然地將頭部繞頸部軸線移動。校準的積極效果已明顯地在頭部跟蹤算法和多個AR/VR子使用案例中的關鍵性能定位結果中得到證明。
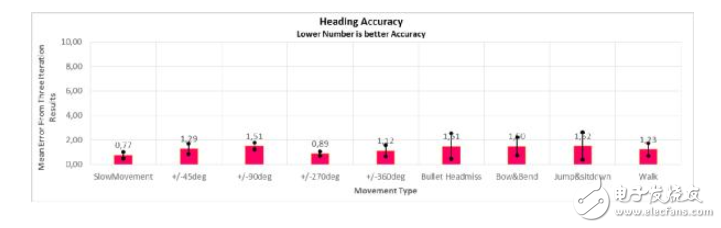
圖12:AR/VR耳機——帶磁力計校準的動態運動
游戲控制板,VR/TV遙控器
隨著定向傳感器滲透到越來越多的電視遙控器中,以及VR遙控器和游戲控制板向應用程序開發者提供越來越復雜的服務,收集準確可靠的航向數據并使真北與內容顯示設備彼此協調變得至關重要。這一問題尤其體現在,當用戶手持控制裝置時,盡管他們的手靜止,但依然看到光標在前進中漂移,或光標朝著與其實際手部動作不同的方向移動。
同樣,Bosch Sensortec的磁力計校準器考慮到遙控器或游戲控制板的自然運動,并大大減少了航向偏差,如下面的實際數據所示。
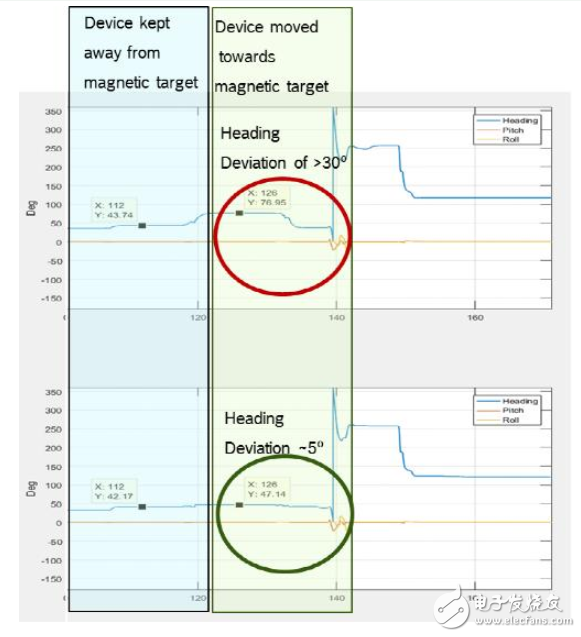
圖13:游戲控制板/VR遙控精度與磁力計校準
綜述
3D線圈和數據驅動工具的組合可用于創建和利用SIC矩陣,此外,通過借助用戶界面通知用戶進行八字形動作,和集成自然使用型快速磁力計校準器軟件,九軸傳感器數據融合的可靠性如今獲得大幅提升。這一點非常重要,因為磁力計精度和傳感器數據融合是智能手機、可穿戴設備、AR/VR耳機和控制單元,甚至機器人真空吸塵器等各種設備的重要組成部分。
Bosch Sensortec的3D軟鐵補償將“禁區”減少了70%,為設計師和布局工程師提供了更大的靈活性和準確性保證,并顯著降低了對產品再原型設計的需求。
此外,使用中校準以及智能校準技術通過降低現代環境中普遍存在的硬鐵扭曲,大大提高了航向精度。雖然使用中校準依賴于用戶在三維空間中進行八字形動作,但Bosch Sensortec開發的智能校準器可以巧妙地融合設備自然使用期間收集的傳感器數據,以實現相同的結果。例如,對于智能腕表等可穿戴設備,軟件通過傳感器數據融合提高了行人跟蹤的可靠性。與此類似,通過分析耳機用戶的各種典型動作,例如躲避、低頭和彎腰、跳躍和坐下等,Bosch Sensortec比市面上其他類似的傳統型解決方案實現了更高的傳感器數據融合精度。
雖然航向精度的提高只是傳感器數據融合如何改善最終用戶體驗的一個例子,但Bosch Sensortec的傳感器數據融合軟件中還包含其他多種算法,可以幫助設備制造商令自己的設備脫穎而出,并大大改善終端用戶體驗。












 工商網監
工商網監
評論