 電子發燒友App
電子發燒友App


引言
無人機、無人車、無人船、機器人等代表性無人系統的智能自主控制是當前自動控制領域的研究熱點,更是提升無人系統自主性和智能化水平的核心技術。自主導航技術利用對應的自主導航系統獲取無人系統自身的位置、速度及姿態信息,是實現無人系統智能自主控制必不可少的技術保障。在無線電導航、地形匹配導航、慣性導航、衛星導航、磁導航及視覺導航等眾多導航技術中,不需要依賴外界信息的慣性導航技術是目前實現無人系統自主導航的一種最強有力技術手段。基于微機電系統(micro-electro-mechanical system, MEMS)慣性傳感器的MEMS慣性導航技術是慣性導航技術的一個重要分支,其系統具有成本低、體積小、功耗低以及抗沖擊強等優點。因此,針對MEMS慣性傳感器及其導航技術的研究對無人系統自主導航技術的快速發展和滿足其日益提升的應用需求有重要的支撐意義。
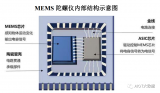
1. MEMS慣性傳感器
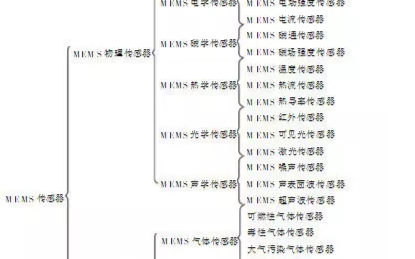
1.1 MEMS慣性傳感器的分類
MEMS慣性傳感器包括MEMS陀螺儀及MEMS加速度計,其分類有多種方式,根據精度由低到高其可分為消費級(零偏》100°/h)和戰術級(零偏0.1°/h ~ 10°/h)。
根據感知角速度的方式,MEMS陀螺儀可以分為振動臂式、振動盤式和環形諧振式。振動臂式MEMS陀螺儀通過測量扭轉振動幅度以及扭轉振動相位來獲取角速度,典型代表為ENV-05A系列音叉式陀螺。振動盤式MEMS陀螺通過測量元件與底部之間電容量的變化來獲取角速度,典型代表為霍尼韋爾公司的HG1940慣性測量單元。環形諧振MEMS陀螺儀通過測量磁場變化來獲取角速度,典型代表是SiIMU02陀螺儀。
根據感知加速度的方式,MEMS加速度計可分為位移式、諧振式和靜電懸浮式。位移式MEMS加速度計通過檢測電容變化來測量加速度大小,典型代表為Northrop Grumman公司的SiACTM。諧振式MEMS加速度計通過測量諧振頻率的變化來測量加速度大小,精度很高,典型代表是霍尼韋爾公司的SiMMA。靜電懸浮式MEMS加速度計通過測量電容來獲取懸浮狀態下的圓盤或圓球位置從而測量加速度大小,理論精度高,典型代表是法國ONERA公司的SuperSTAR加速度計。
根據傳感原理,MEMS加速度計可分為壓阻式、壓電式和電容式3類。壓阻式加速度計通過將相應懸臂梁上的電阻轉化成電壓輸出,即可將加速度信息轉變為電信號輸出,具有體積小、加工工藝簡單、精度高、響應速度快、抗電磁干擾強等優點。壓電式MEMS加速度計通過測量內部壓敏阻值變化與被測加速度的關系,從而推算出外界加速度,具有測量范圍大、重量小、體積小、抗干擾能力強、結構簡單和測量精度高的優點。電容式MEMS加速度計通過檢測電容值的變化量,從而推算出外界加速度,具有測量精度高、靈敏度高、穩定性好、功耗低等優點。
1.2 MEMS慣性傳感器的發展概況
從MEMS陀螺儀與加速度計研制成功至今,伴隨著MEMS技術的發展,MEMS陀螺儀與加速度計器件性能得到明顯的提高。
1.2.1 國外MEMS陀螺儀發展歷程
1954年,C.S史密斯發現了壓阻效應,為微型壓力傳感器的研制提供理論基礎。1967年,表面犧牲層工藝技術被提出,并在此基礎上具有高諧振頻率的懸梁技術被研制出。1989年,美國Draper實驗室研制出第一臺振動式微機電陀螺儀,這是慣性技術領域的一大變革;1993年,該實驗室研制出一種音叉線振動式微機電陀螺儀,將陀螺儀的發展向前邁出一大步。1997年,在美國加州大學伯克利分校,首個表面微機械的Z軸陀螺儀被設計出,其分辨率為1°/s。1999年,橫濱技術中心提出一種采用解耦設計的MEMS陀螺儀,其分辨率可達1°/h。2001年,美國Draper實驗室設計出一種單晶硅音叉式MEMS陀螺儀,溫度漂移為1°/(h/℃)。2002年,美國ADI公司研制出世界上第一款單片集成的商用陀螺儀ADXRS。2004年,德國的HSG公司設計出一款表面微機械的X軸陀螺儀,靈敏度為8mV/(°/s)。2006年,日本兵庫大學的K. Maenska報道了一種僅由一個帶電極的鋯鈦酸鉛棱柱體構成的新型的壓電振動固態微機械陀螺。2013年,法國電子與信息技術實驗室設計出一種采用了橫向懸掛設計的3D電容音叉陀螺。
1.2.2 國外MEMS加速度計發展歷程
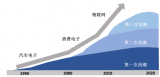
20世紀60年代末,對MEMS加速度計的研究和開發工作開始啟動,主要研發單位為美國的Draper實驗室、斯坦福大學以及加州大學伯克利分校。20世紀70年代,綜合MEMS工藝與壓阻效應,出現了壓阻式加速度計,首次實現了MEMS加速度計的商業化。20世紀80年代末期,隨著表面MEMS工藝與傳感技術的結合,電容式MEMS加速度計得到迅速發展,并在汽車行業得到首次應用。1989年,美國的ADI公司研制出一款ADXL50加速度計,該加速度計有50g量程。自21世紀以來,隨著集成電路及計算機行業的迅速發展,MEMS加速度計更多應用于汽車安全氣囊,而且在手機、計算機等電子消費產業中發揮越來越重要的作用。未來MEMS加速度計將向著輕量化、高精度、經濟化的方向發展。
1.2.3 國內MEMS慣性器件發展歷程
我國的MEMS慣性器件的研究起步于20世紀90年代后期,自1995年起得到科技部、教育部、國家自然科學基金委員會等大力支持,國內的MEMS陀螺儀研制取得了顯著成果。1998年清華大學研制出全國第一個音叉式MEMS陀螺儀,其分辨率為3°/s。2006年,電子集團49所與俄羅斯應用物理研究所合作研制出分辨率為70°/h的陀螺。2010年,中國科學院傳感器技術國家重點實驗室報道了一種采用高對稱結構的微機械振動環型陀螺。2012年,***大學的Chun-Wei Tsai等制作了具有寬驅動頻率的雙解耦微機械陀螺。經過20多年的發展,我國現有的技術已經形成從設計到生產、測試的一系列體系,國內眾多著名MEMS慣性器件公司的器件精度也有了顯著提高。
2. MEMS慣性導航的關鍵技術
MEMS慣性導航系統軟件設計方面主要是導航算法,包括初始對準、慣性解算及誤差補償等算法;其硬件設計方面主要包括電路及結構的設計、慣性導航傳感器(陀螺儀、加速度計)及導航計算機的選擇等。系統精度不僅與硬件相關,而且與軟件有很大關系。在目前硬件加工技術發展較慢的前提下,系統中誤差補償算法尤為重要。對于導航精度要求較高的應用,由于系統具有長航時的特點,MEMS慣性導航誤差易發散,多采用組合導航的方式來抑制慣性導航系統的誤差發散。本節主要介紹MEMS慣性傳感器的誤差分析與補償以及MEMS組合導航算法設計。
2.1 MEMS慣性傳感器的誤差分析與補償
慣性傳感器是慣性導航系統的核心組成,其精度決定了慣性導航系統的精度,所以慣性導航系統的一項主要工作就是將慣性傳感器誤差進行補償。提高慣性導航系統精度的手段大致有以下兩種,第一種是從工藝上提高慣性傳感器的精度,但是此方法技術難度大,且對于加工條件、材料等要求高;第二種就是采用誤差補償方式來對于系統的誤差進行補償。
MEMS慣性傳感器的誤差分析與補償方法大致分為3種:第一種是采用誤差補償算法的方式進行補償,即將誤差通過算法擬合方式進行補償;第二種是采用旋轉調制技術,將IMU(慣性測量單元)加上轉動機構進行旋轉,通過旋轉來消除常值誤差(稱為旋轉調制);第三種是采用Allan方差分析法,以補償系統的隨機誤差。
2.1.1 慣性傳感器的溫度誤差補償技術
溫度所帶來的慣性器件精度誤差主要來自慣性器件本身對于溫度的敏感程度以及溫度梯度或者溫度與溫度梯度的交叉乘積項的影響。隨著溫度的變化,慣性器件的結構材料由于熱脹冷縮會形成干擾力矩,因此需要對于慣性器件的溫度特性進行研究,以獲取溫度對于慣性器件輸出性能影響的規律,建立加速度計靜態溫度模型并且對因溫度變化引起的誤差進行補償,是提高其精度的一種有效手段。
對陀螺儀及加速度計的靜態溫度模型進行擬合的方法一般采取最小二乘法,以此得到陀螺儀和加速度計的數學模型系數與溫度的關系并建立靜態溫度誤差補償模型,從而提高器件精度。國內多家陀螺儀及加速度計生產單位均對溫度誤差補償進行研究,使之較補償前的產品靜態誤差減小了一個數量級。
2.1.2 慣性傳感器常值漂移誤差的旋轉調制技術
旋轉調制技術起初應用于靜電陀螺系統,通過殼體旋轉來自動補償漂移誤差力矩。自激光陀螺面世以來,美國迅速開展了旋轉式慣性導航系統的研究,1968年,有學者首次提出通過旋轉IMU的方式來對慣性傳感器的漂移誤差進行補償。20世紀70年代,羅克韋爾公司研制了靜電陀螺檢測器,殼體采用了旋轉技術,使得與其配套的艦船系統具備長時間的精度性能。20世紀80年代,Sperry公司研制了單軸旋轉慣性導航系統,采用了經典的單軸四位置正反轉停方案,直到現在該方案仍被廣泛應用。1989年,北約船用標準慣性導航系統即MK49型雙軸旋轉式激光陀螺慣性導航系統,在潛艇以及水面艦艇上進行裝備。在國內國防科技大學首先開始旋轉調制技術在光學陀螺上的應用。如今旋轉調制技術在MEMS上主要采用單軸旋轉方案,雙軸旋轉方案由于旋轉機構復雜等原因相對應用較少。
由于旋轉的需要,導航系統采取捷聯算法,從原理上來講,MEMS慣性導航系統旋轉調制可以有效抵消系統常值誤差,系統的誤差傳播方程如下:
在式(1)中,由于陀螺儀以及加速度計自身測量誤差所帶來的系統誤差為σωbib和σfb,因此式中的Cnbσωbib以及Cnbσfb兩項誤差是由于測量誤差引入的,故誤差補償主要補償這兩項誤差。由于以上兩項均包含Cnb,周期性地改變Cnb值即可消除這兩項誤差,故在慣性導航系統上施加旋轉裝置,將周期性誤差通過旋轉抵消,這就是旋轉調制技術提高慣性導航系統精度的原理。
旋轉調制方案需要確定旋轉軸個數(單軸、雙軸或多軸)、旋轉速率、旋轉角加速度、轉停時間及停止位置數等參數。靜基座及動基座下轉停方案的不同會對旋轉調制效果產生影響。
2.1.3 慣性傳感器隨機誤差的Allan方差分析
目前常用的隨機誤差建模方法有時間序列分析法、Allan方差法及功率譜密度分析法。
由于慣性導航的誤差方程推導都是建立在誤差為白噪聲的基礎上,而在現實中,MEMS慣性器件的輸出數據包含的各種噪聲都會對系統產生干擾,導致計算結果中出現隨機誤差。陀螺輸出值的誤差中的隨機噪聲需要建模來補償,而Allan方差分析法則是目前隨機噪聲分析中應用最普遍、最廣泛的方法之一。MEMS器件中隨機誤差主要分為角度隨機游走、加速度隨機游走、量化噪聲及零偏穩定性等。
Allan法是在1966年DavidAllan提出的,其主要是用于分析振蕩器相位以及評估頻率穩定性。Allan方差可以反映出兩個連續采樣區間內平均頻率差的起伏狀況,基于相位數據和頻率數據的阿倫方差估計式為
2.2 MEMS組合導航算法
MEMS慣性導航系統具有低成本、體積小、功耗低等優勢。但是由于MEMS慣性器件精度較低,長時間使用會導致誤差發散較快,不能擔任長時間的導航任務,所以目前一般采用多傳感器融合的方式來進行導航,即將MEMS慣性導航與其他導航方式進行融合,通過其他導航系統的導航信息輔助來修正慣性導航系統的誤差,由此來提高整個導航系統的精度。若要進行多個導航系統的數據融合,則要使用濾波等方法。
2.2.1 卡爾曼濾波算法
卡爾曼(Kalman)濾波是一種通過在被提取的觀測信號中獲得信息來對狀態量進行估計的濾波算法。Kalman濾波是一種實時遞推算法,處理對象是隨機對象,根據系統噪聲與觀測噪聲,將系統的觀測值的輸出作為濾波器輸入,將需要估計的狀態量作為輸出,即通過上一時刻的觀測值估計出下一時刻的系統狀態量,故其實質上是一種最優估計方法。
常規的Kalman濾波適用于線性高斯模型,而大多數慣性導航系統均為非線性系統,故常規的Kalman濾波不能滿足要求,必須建立適用于非線性系統的濾波算法。因此發展出擴展Kalman濾波方法,其將非線性系統的非線性函數通過泰勒級數等方法線性化,并省去高階項,得到線性系統模型。
由于擴展Kalman濾波是將非線性函數進行線性化,因此不可避免的帶來線性化誤差,由此發展出無跡Kalman濾波。該濾波法針對非線性函數,對其概率密度進行近似,使用已經確定的樣本來估計狀態的后驗概率密度,不需要對非線性函數進行近似。相比于擴展卡爾曼濾波而言,無跡Kalman濾波的統計量不僅具有更高的精度,而且具有更高的穩定性。
2.2.2 互補濾波算法
傳統的擴展Kalman濾波具有雅可比矩陣,存在計算量大、并且白噪聲條件不能保證時刻成立等缺點;但是采用互補濾波算法可以減小計算量,提高系統測量精度,并且不需要在白噪聲條件下也可成立。利用陀螺儀與加速度計在頻域上的互補特性可以將陀螺儀與加速度計的數據融合精度提高,實現高精度的融合。
2.2.3 神經網絡
機器神經網絡是以生物神經網絡為原型。神經網絡是機器學習的一種,通過網絡系統來訓練模型參數,神經網絡主要由輸入層、輸出層及隱含層構成。從20世紀40年代的M-P神經元和Hebb學習規則,到50年代的Hodykin-Huxley方程、感知器模型與自適應濾波器,再到60年代的自組織映射網絡、神經認知機、自適應共振網絡,眾多神經網絡計算模型已發展成為計算機視覺、信號處理等領域的經典方法,帶來了深遠的影響。
神經網絡有正向神經網絡及反向神經網絡兩種。神經網絡具有并行處理、分布式存儲、高冗余度、可以進行非線性運算以及良好的容錯性等特點。隨著神經網絡技術的發展,其應用領域也在不斷拓寬,如今在慣性導航、圖像處理等領域發揮著至關重要的作用。神經網絡算法具有廣泛的理論基礎,其中包括神經網絡結構模型、網絡通信模型、記憶模型。學習算法表明,基于神經網絡算法的大數據分析具有良好的性能和應用前景,在傳感器的數據融合中提供了決策依據,為無人系統的自主導航作出重要的貢獻。模糊神經網絡在數據融合、數據挖掘中性能優越,可以較好利用語言,且知識表達形式易于理解,但存在自學習能力弱、難利用數值信息等缺點,故可將人工神經網絡與模糊系統進行結合。
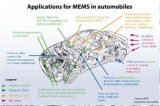
3. MEMS慣性導航的應用
MEMS慣性導航技術以其體積小、功耗低、重量輕及低成本等特點在多種無人系統,如無人機、無人車、無人船及機器人等系統中得到普遍應用。
3.1 無人機領域
在近幾年來,微小型無人機在軍用以及民用領域內發揮著越來越重要的作用,而為了實現無人機自身的定位以及定位問題,航姿測控系統發揮著至關重要的作用。航姿測控系統主要由GPS天線、GPS接收板、捷聯式磁傳感器、慣性測量單元、高度空速傳感器以及調理單元構成。傳感器的精度直接決定無人機位姿的精度,傳感器采集到的數據通過導航算法計算出無人機的位置姿態信息。目前無人機的導航主要采取將MEMS慣性導航系統與GPS組合的手段,這樣既可以提高系統精度,又可以縮短初始對準的時間。如今無人機上面搭載的導航系統精度為消費級,如Invensense MP6500的精度為2°/s,而隨著MEMS器件精度的提高以及成本的降低,未來無人機的導航精度將提高。
3.2 無人車領域
無人車是通過車載傳感器來感知外界環境,并且獲取車輛位置、姿態信息以及障礙物信息,從而控制車輛行駛速度、轉向以及起停等。目前谷歌、百度等公司均在開展無人車的研制工作,并已經開展道路實驗。當無人車行走到高大建筑物下,且GPS被遮擋而無法正常工作時,無人車上搭載的慣性導航系統短時間內的精度可以滿足車輛自主前行的需求。無人車上的MEMS慣性導航系統,一般精度要求較高。
3.3 無人船領域
由于邊境巡邏、水質勘探等任務所采取普通的艦船設備較為危險并且成本較高,致使無人船技術發展迅速。獲取無人船位置姿態信息是無人船能夠自主開展工作的重要前提。如今無人船上配備的傳感器主要有GPS,MEMS慣性導航系統及避障雷達等。隨著MEMS慣性導航系統精度的提高,慣性導航系統在無人船的位置姿態信息獲取中發揮著至關重要的作用。無人船上搭載的MEMS慣性導航系統,一般消費級的中低精度即可滿足需求。
3.4 機器人領域
移動機器人是一種可以自主在固定或時變環境中進行工作的自動化設備。近年來在服務業、家居、工業等領域應用廣泛。輪式機器人在應用方面與無人車相似,均通過視覺相機、MEMS慣性傳感器、激光雷達及里程計等傳感器采集數據進行導航。國內高校如國防科技大學、清華大學、上海交通大學、哈爾濱工業大學等高校均對輪式機器人較早開始研究工作。在采取慣性傳感器與里程計的輪式機器人的導航過程中,MEMS慣性傳感器提供精確的姿態角,而由于輪子打滑等對慣性導航以及里程計產生影響,現大多通過視覺里程計與MEMS慣性導航組合導航,通過擴展Kalman濾波算法來進行數據融合,從而提高系統精度。
3.4 其他領域
除了上述領域外,MEMS慣性傳感器還在電子設備,如手機、平板電腦、游戲機、相機、VR眼鏡以及用于室內定位的單兵導航。目前消防員在高樓滅火時以及行動不便的老人在家的人身安全問題是社會普遍關注的問題,如果將MEMS慣性導航系統放置在探測人員身上進行導航,則可以獲得實時位置姿態信息,這樣就可以提高被監視人員的安全系數。使用MEMS慣性導航系統進行室內人員定位辦法大致有以下幾種:一種是利用MEMS加速度計對人員步伐狀態進行檢測識別,再通過磁力計檢測人員運動方向,由此來進行室內人員的定向定位。另外一種方法是采用兩個或多個MEMS慣性導航系統,安裝在人員腳部以及腰部位置,通過多個MEMS慣性導航系統修正方法來進行定位。
4. MEMS慣性導航的發展展望
4.1 MEMS慣性導航器件
近幾年來,MEMS慣性傳感器發展迅速,精度不斷提高。雖然相比光纖陀螺、激光陀螺仍有很大差距,但是其價格低、體積小、重量輕,使MEMS慣性導航系統在慣性導航系統中發揮重要作用。未來隨著MEMS材料工藝與制造工藝不斷發展,MEMS慣性導航系統精度必將不斷提高,其成本也將不斷降低,因此采用戰略級高精度MEMS陀螺儀取代光纖陀螺儀是一個重要發展趨勢。隨著微加工工藝的不斷進步,MEMS慣性傳感器將向著輕質、小型化方向發展。
4.2 MEMS組合導航算法
盡管MEMS慣性傳感器精度在不斷進步,但是戰術級MEMS慣性導航系統誤差隨時間積累仍然發散較大,在很多場合還不能滿足高精度的要求,故MEMS慣性導航與GPS組合導航仍然是主要導航方式。因此,研究精度以及效率更高、魯棒性更強的算法,在軟件方面給予組合導航系統支持也是重要的發展方向。
4.3 MEMS慣性導航的應用
在MEMS技術發展的數十年內,MEMS慣性導航技術在電子領域、汽車行業以及家居服務行業得到了廣泛應用。隨著MEMS慣性導航精度和穩定性不斷提高,未來MEMS慣性導航技術必將在無人系統領域,如航天器、衛星、機器人等無人系統中,扮演重要的角色。
5. 結語
MEMS慣性導航技術具有小型化、低成本等優勢,在過去數十年內得到了迅速發展,在無人系統領域內得到了越來越多的應用,其作為未來慣性導航的主要發展方向,正在展現出強大的潛力以及良好的應用前景。本文回顧了MEMS慣性導航系統發展歷程,總結其關鍵技術,并對MEMS慣性導航技術的應用及發展進行展望,為MEMS慣性導航系統的研究提供參考。
來源;MEMS













 工商網監
工商網監
評論