傳感器的非線性校正有多種方法,并且也都得到了不同程度的應(yīng)用。傳統(tǒng)的非線性傳感器線性化的方法是硬件補(bǔ)償,這種方法難以做到全程補(bǔ)償,而且補(bǔ)償硬件的漂移會(huì)影響整個(gè)系統(tǒng)的精度,因此可靠性不高、測(cè)量范圍有限
2019-10-30 06:30:10
要求針對(duì)測(cè)量?jī)x表中傳感器測(cè)量存在的誤差情況,給出線性誤差自動(dòng)校準(zhǔn)的方法。(1)對(duì)傳感器線性誤差進(jìn)行分析。(2)提出基于硬件、軟件和兩者結(jié)合的三種校準(zhǔn)方法的研究。(3)對(duì)三種方法的優(yōu)缺點(diǎn)進(jìn)行對(duì)比總結(jié)。求助各位大神啊~~!!
2012-11-22 14:59:05
【摘要】:利用非線性偏振旋轉(zhuǎn)效應(yīng)可在能量對(duì)稱的非線性光纖環(huán)鏡中獲得強(qiáng)度相關(guān)損耗輸出,具有該特性的非線性光纖環(huán)鏡可作為強(qiáng)度均衡器來抑制室溫條件下的摻鉺光纖中的模式競(jìng)爭(zhēng)。對(duì)這種環(huán)鏡在多波長(zhǎng)摻鉺光纖激光器
2010-04-24 10:15:37
因變量和自變量之間的關(guān)系實(shí)現(xiàn)對(duì)數(shù)據(jù)的預(yù)測(cè)。例如,對(duì)房?jī)r(jià)估計(jì)時(shí),需要確定房屋面積(自變量)與其價(jià)格(因變量)之間的關(guān)系,可以利用這一關(guān)系來預(yù)測(cè)給定面積的房屋的價(jià)格。可以有多個(gè)影響因變量的自變量。因此,回歸
2020-07-28 14:36:05
線性模型和非線性模型的區(qū)別,以及激活函數(shù)的作用
2020-06-05 12:08:25
。本文中,我們將為您介紹需要了解的非線性GaN 模型的基礎(chǔ)知識(shí)。什么是非線性GaN 模型?對(duì)許多工程師來說,設(shè)計(jì)PA 的第一步是閱讀晶體管產(chǎn)品的數(shù)據(jù)手冊(cè)并查看S 參數(shù)。S 參數(shù)文件很有用,但有關(guān)器件大信號(hào)
2018-08-04 14:55:07
本帖最后由 南中南 于 2015-12-31 11:01 編輯
四軸飛行器組合導(dǎo)航非線性濾波算法基于展卡爾曼濾波和不敏卡爾曼濾在四軸飛行器中的數(shù)學(xué)模型,研究擴(kuò)展卡爾曼濾波( Extended
2015-12-31 10:53:54
)進(jìn)行非線性數(shù)據(jù)分類。主成分分析(PCA)和線性判別分析(LDA)PCA和LDA用于降維,減少噪聲,并保留數(shù)據(jù)的重要特征。在并行PCA-LDA-SVM模型中,先對(duì)原始數(shù)據(jù)同時(shí)進(jìn)行PCA和LDA處理
2023-12-13 19:04:23
用NARMA-L2結(jié)構(gòu)來辨識(shí)非線性系統(tǒng),該NARMA-L2神經(jīng)網(wǎng)絡(luò)由兩個(gè)神經(jīng)網(wǎng)絡(luò)(類似ARX的神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu))構(gòu)成。其原理見下面兩張圖。結(jié)合自校正控制器組成神經(jīng)自校正控制器,如圖下對(duì)于這個(gè)結(jié)構(gòu)和控制
2019-07-24 20:52:07
初始化權(quán)重: 定義要用于預(yù)測(cè)的線性回歸模型。現(xiàn)在需要矩陣乘法來完成這個(gè)任務(wù): 為了更好地求微分,定義損失函數(shù): 選擇正確的優(yōu)化器: 定義初始化操作符: 開始計(jì)算圖: 繪制損失函數(shù): 在這里,我們發(fā)現(xiàn)損失
2020-08-11 19:35:23
本小節(jié)直接從 TensorFlow contrib 數(shù)據(jù)集加載數(shù)據(jù)。使用隨機(jī)梯度下降優(yōu)化器優(yōu)化單個(gè)訓(xùn)練樣本的系數(shù)。實(shí)現(xiàn)簡(jiǎn)單線性回歸的具體做法導(dǎo)入需要的所有軟件包: 在神經(jīng)網(wǎng)絡(luò)中,所有的輸入都線性增加
2020-08-11 19:34:38
Tensorflow 非線性回歸
2020-05-12 10:19:42
如何利用dsp實(shí)現(xiàn)一個(gè)系統(tǒng)數(shù)學(xué)模型的參數(shù)辨識(shí),還請(qǐng)前輩們有時(shí)間指導(dǎo)一下,給我個(gè)具體步驟或者實(shí)例,不勝感激!
2017-07-26 09:55:13
負(fù)載是電弧,想用一個(gè)非線性的類似電阻的模型代替,saber里有嗎?
2013-01-12 18:00:58
)、無電流環(huán),無需直接調(diào)節(jié)電流; 3)、無需坐標(biāo)變換; 4)、無需單獨(dú)的電壓PWM調(diào)制; 5)、無需速度傳感器; 6)、需要精確的定子磁鏈和轉(zhuǎn)矩估計(jì)。 非線性轉(zhuǎn)矩控制主要包括VST-DTC
2023-03-21 16:10:08
分布。這個(gè)方法相當(dāng)復(fù)雜,原理方面我們這里不做詳細(xì)描述,這里只說明一些簡(jiǎn)單的概念,為什么使用MCMC呢? 頻率主義和貝葉斯回歸方法之間的關(guān)鍵區(qū)別在于他們?nèi)绾翁幚?b class="flag-6" style="color: red">參數(shù)。在頻率統(tǒng)計(jì)中,線性回歸模型的參數(shù)
2022-10-08 15:59:35
針對(duì)青霉素發(fā)酵過程中的某些關(guān)鍵生物參數(shù)(如菌體濃度、基質(zhì)濃度、產(chǎn)物濃度)難以實(shí)時(shí)在線測(cè)量的問題,提出一種基于最小二乘支持向量機(jī)(LS-SVM)逆模型的軟測(cè)量方法。該方法用具有高斯核函數(shù)的LS-SVM
2009-09-19 09:36:09
,采用SOPC技術(shù)可以節(jié)省成本,提高資源利用率,縮短開發(fā)周期和便于系統(tǒng)升級(jí)等特點(diǎn)。本文采用基于FPGA的SOPC技術(shù)研究了傳感器非線性軟件校正的問題。算法的測(cè)試結(jié)果證實(shí)了方法的可行性。:
2018-11-01 17:24:56
基于DSP在算法實(shí)現(xiàn)和調(diào)試方面更為方便[6]。因?yàn)橹懈叨说腇PGA支持軟CPU內(nèi)核(典型的如Nios),可以用高級(jí)語(yǔ)言(如C語(yǔ)言)進(jìn)行非線性校正算法的編程和調(diào)試,所以我們采用基于FPGA的校正方案。數(shù)字
2018-07-30 18:09:06
用單一CPU無法實(shí)現(xiàn)的,如需要高速數(shù)據(jù)處理的傳感器校正算法、補(bǔ)償算法、神經(jīng)網(wǎng)絡(luò)傳感算法、模糊傳感算法、多傳感器融合等復(fù)雜算法得以實(shí)現(xiàn)。可進(jìn)一步提高測(cè)量精度、測(cè)量范圍與測(cè)量?jī)?nèi)容。同時(shí),用硬件實(shí)現(xiàn)以往軟件
2008-08-26 09:38:34
目標(biāo)跟蹤算法的研究,并加入噪聲干擾,更接近真實(shí)的軍事與民用環(huán)境。首先搭建紅外/雷達(dá)雙模導(dǎo)引頭仿真平臺(tái),進(jìn)而設(shè)計(jì)基于多傳感器的多模型機(jī)動(dòng)目標(biāo)跟蹤算法,采用擴(kuò)展卡爾曼濾波,最終實(shí)現(xiàn)算法的軟件仿真及跟蹤性能
2018-12-05 15:16:23
傳感器激勵(lì)電壓的方式校正非線性,當(dāng)傳感器用于放射滴定時(shí)也會(huì)變化。在這種模式下,傳感器和 電子器件共用一個(gè)電源。測(cè)試放射滴定電源抑制很難用精確的電源實(shí)現(xiàn)。 在模擬傳感器的時(shí)候需要三個(gè)精確電源。一個(gè)用于共模
2018-11-14 14:59:31
,要用具有補(bǔ)償功能的測(cè)量電路對(duì)輸出電容進(jìn)行非線性補(bǔ)償。由于高溫壓力傳感器工作在高溫環(huán)境下,補(bǔ)償電路會(huì)受到環(huán)境溫度的影響,從而產(chǎn)生較大的誤差。基于模型識(shí)別的高溫壓力傳感器,正是為了避免補(bǔ)償電路在高溫環(huán)境
2018-11-12 16:23:46
的“大師”知識(shí)來完成,使用測(cè)得的負(fù)載牽引數(shù)據(jù)可以提高PA設(shè)計(jì)的成功率,但不一定能夠獲得所需應(yīng)用頻率下的負(fù)載牽引數(shù)據(jù)。而使用精確的非線性模型可以更快地生成設(shè)計(jì)數(shù)據(jù),關(guān)注更精確的PA 行為,并獲得更好的結(jié)果。本文中,我們將為您介紹如何利用非線性模型幫助GaN PA進(jìn)行設(shè)計(jì)?
2019-07-31 08:13:22
如何去實(shí)現(xiàn)一種基于磁鏈模型的非線性觀測(cè)器設(shè)計(jì)呢?如何對(duì)其模型進(jìn)行仿真?其波形是怎樣的?
2021-11-19 07:34:36
今天我們用C語(yǔ)言實(shí)現(xiàn)一個(gè)簡(jiǎn)單的線性回歸算法;在代碼前面我們?cè)诨仡櫼幌?b class="flag-6" style="color: red">線性回歸。線性回歸是回歸問題中的一種,線性回歸假設(shè)目標(biāo)值與特征是線性相關(guān)的,即滿足一個(gè)多元一次方程式。通過構(gòu)建損失函數(shù),來求解損失
2021-07-20 06:34:33
如何糾正線性可變差分變壓器定位傳感器中非線性問題?如何從高頻率傳感器的輸出提取振幅信息?數(shù)字異步振幅解調(diào)技術(shù)有哪幾種分類?如何有效解決信號(hào)非線性問題?
2021-04-13 07:01:25
下實(shí)現(xiàn)高階溫度補(bǔ)償系數(shù)的計(jì)算,通過實(shí)驗(yàn)對(duì)該方法進(jìn)行驗(yàn)證。 1 高階溫度補(bǔ)償模型的建立 1.1 高階溫度補(bǔ)償建模 壓力傳感器輸出非線性誤差主要是由零點(diǎn)溫度漂移和靈敏度溫度漂移產(chǎn)生,零點(diǎn)溫度漂移
2018-11-06 15:56:29
(EKF)的步驟是:先進(jìn)行線性化,再進(jìn)行離散化。飛行器俯仰通道動(dòng)力學(xué)方程線性化參考文獻(xiàn):永磁同步電機(jī)的無速度傳感器控制算法研究 馮曉彤[D] ??針對(duì)一般的連續(xù)非線性系統(tǒng),有x˙=f(x,t)+B(t)u(t)(1)\dot{x}=f(x,t)+B(t)u(t)\tag{1}x˙=f(x,
2021-08-27 06:06:16
非線性與多變量系統(tǒng)相關(guān)辨識(shí)主要研究單變量線性系統(tǒng)以及非線性系統(tǒng)Wiener模型和Hammerstein模型的線性子系統(tǒng)的脈沖響應(yīng)函數(shù)的辨識(shí),差分模型的全結(jié)構(gòu)與參數(shù)的辨識(shí),以及線性隨
2009-01-14 22:32:02 0
0 用A/D轉(zhuǎn)換器實(shí)現(xiàn)鉑電阻溫度計(jì)的非線性校正
A/D Converter Based Nonlinear Correction for Platinum-resistance Thermometer
2009-03-16 14:15:5251 【摘要】提出了一種非線性系統(tǒng)的模型辨識(shí)方法。在只有被辨識(shí)系統(tǒng)的輸入輸出數(shù)據(jù)的情況下,利用一種無監(jiān)督的聚類算法來進(jìn)行結(jié)構(gòu)辨識(shí),從而自動(dòng)獲得模糊規(guī)則庫(kù),并可以得
2009-03-19 20:55:3622 在許多嵌入式應(yīng)用中,都有對(duì)外界物理量的采集問題。這些參量在應(yīng)用系統(tǒng)輸入通道的逐次傳遞中會(huì)產(chǎn)生非線性。本文介紹線性標(biāo)度變換原理和用映射法實(shí)現(xiàn)非線性校正的原理和方
2009-05-13 16:33:2814 提出了一種用支持向量機(jī)校正傳感器非線性誤差的原理和方法。該算法只依據(jù)樣本就可以正確辯識(shí)傳感器逆模型特征,而不需關(guān)于逆模型函數(shù)形式的任何先驗(yàn)知識(shí),并將原問題轉(zhuǎn)化
2009-05-23 16:10:009 基于BP 神經(jīng)網(wǎng)絡(luò)能以任意精度逼近任何非線性連續(xù)函數(shù)的原理。通過在MATLAB環(huán)境下,對(duì)典型的不穩(wěn)定、非線性、強(qiáng)耦合的倒立擺系統(tǒng)建立了BP 神經(jīng)網(wǎng)絡(luò)辨識(shí)結(jié)構(gòu),并對(duì)辨識(shí)結(jié)果進(jìn)
2009-05-27 11:54:1414 基于BP 神經(jīng)網(wǎng)絡(luò)能以任意精度逼近任何非線性連續(xù)函數(shù)的原理。通過在MATLAB環(huán)境下,對(duì)典型的不穩(wěn)定、非線性、強(qiáng)耦合的倒立擺系統(tǒng)建立了BP 神經(jīng)網(wǎng)絡(luò)辨識(shí)結(jié)構(gòu),并對(duì)辨識(shí)結(jié)果
2009-05-27 13:28:5321 校正原理:轉(zhuǎn)矩測(cè)量傳感器的輸出- 輸入特性β= f ( M)存在非線性。取傳輸特性的反函數(shù)M = f - 1 (β) 作為校正函數(shù)。將該函數(shù)以軟件的形式裝入單片機(jī)內(nèi),這就使得測(cè)量?jī)x的傳輸系數(shù)等
2009-06-08 13:55:3617 詳細(xì)地介紹了有關(guān)鉑電阻的非線性特性并提出三種線性化校正方法。關(guān)鍵詞:溫度傳感器;鉑電阻;非線性;校正
2009-06-12 11:25:5333 本文介紹了一種基于正交小波網(wǎng)絡(luò)(OWN)的非線性系統(tǒng)的辨識(shí)方法。闡述了正交小波網(wǎng)絡(luò)理論,提供了用正交小波網(wǎng)絡(luò)進(jìn)行辨識(shí)的方法,并對(duì)高爐煤粉噴吹系統(tǒng)的非線性系統(tǒng)進(jìn)行了動(dòng)態(tài)
2009-06-24 08:53:1814 提出一種基于動(dòng)態(tài)鏈接庫(kù)技術(shù)的傳感器非線性特性校正新方法。將傳感器是數(shù)據(jù)采集程序與傳感器的非線性特性校正算法置于同一個(gè)動(dòng)態(tài)鏈接庫(kù)中,這樣應(yīng)用程序從動(dòng)態(tài)鏈接庫(kù)獲
2009-06-25 09:55:3126 介紹了用神經(jīng)網(wǎng)絡(luò)校正傳感器系統(tǒng)非線性誤差的原理和方法,提出了基于BP 神經(jīng)網(wǎng)絡(luò)傳感器非線性誤差校正及其模型、算法與實(shí)現(xiàn)技術(shù)。通過計(jì)算機(jī)仿真與應(yīng)用,顯示出這種逆模型不但
2009-06-29 10:22:0612 文章描述了一種用反函數(shù)校正傳感器非線性誤差的方法,闡述了校正原理,提出了利用BP 神經(jīng)網(wǎng)絡(luò)和遺傳算法相結(jié)合,擬合傳感器傳輸特性反函數(shù)的算法,該算法可將傳感器傳輸特性的
2009-06-30 09:36:2511 本文將強(qiáng)跟蹤濾波理論與多傳感器數(shù)據(jù)融合技術(shù)相結(jié)合,提出基于強(qiáng)跟蹤濾波器的多傳感器狀態(tài)與參數(shù)聯(lián)合估計(jì)新算法;對(duì)擁有相同采樣率的分布式多傳感器單模型非線性動(dòng)態(tài)系統(tǒng),
2009-06-30 10:43:5019 從應(yīng)用的角度總結(jié)了傳感器非線性的硬件校正方法,討論了這些方法的優(yōu)點(diǎn)、局限和應(yīng)用技巧。討論結(jié)合實(shí)例,實(shí)用性強(qiáng),對(duì)傳感器非線性的硬件校正技術(shù)具有較好的指導(dǎo)作用。關(guān)鍵
2009-07-04 09:54:2836 針對(duì)傳感器信號(hào)中存在的非線性誤差,介紹了硬件補(bǔ)償和軟件補(bǔ)償兩種方法。硬件補(bǔ)償是基于電壓源可變來實(shí)現(xiàn)傳感器特性的線性化,從而消除了非線性誤差;軟件補(bǔ)償是通過函數(shù)擬合
2009-07-08 15:02:5344 當(dāng)環(huán)境溫度變化時(shí)電容式壓力傳感器的非線性響應(yīng)特性也發(fā)生很大的變化,為了實(shí)現(xiàn)對(duì)電容式壓力傳感器的響應(yīng)特性進(jìn)行自動(dòng)非線性補(bǔ)償,提出了基于神經(jīng)網(wǎng)絡(luò)的智能壓力傳感器。
2009-07-09 09:20:5229 基于改善自掃描光電二極管陣列圖像傳感器的特性的要求,根據(jù)傳感器的工作原理構(gòu)造了光電二極管的非線性電路模型。通過對(duì)該非線性電路模型進(jìn)行分析,列出該電路模型的狀態(tài)
2009-07-09 12:58:5418 結(jié)合支持向量機(jī)和小波理論的優(yōu)點(diǎn),提出了一種基于小波核支持向量機(jī)的傳感器非線性誤差校正的原理和方法。該方法利用小波的多尺度插值特性和稀疏變化特性, 提高了支持向
2009-07-11 08:57:3617 介紹了兩種對(duì)傳感器輸出信號(hào)進(jìn)行線性化處理的方法; 同時(shí), 對(duì)傳感器不可避免的非線性提出了線性補(bǔ)償?shù)姆椒ājP(guān)鍵詞: 傳感器, 非線性, 線性化【Abstract】 Two linear treatments on
2009-07-11 10:48:3254 利用BP算法具有的非線性映射能力對(duì)傳感器標(biāo)定數(shù)據(jù)進(jìn)行輸入-輸出特性的反非線性逼近,將其作為智能傳感器系統(tǒng)的非線性校正軟件,使傳感器在給軟件的支持下提高測(cè)量精度。用
2009-07-11 14:38:1816 傳感器非線性的產(chǎn)生是生產(chǎn)過程中敏感芯片在工藝上處理不當(dāng)造成的,為提高精度對(duì)其進(jìn)行非線性的線性化校正在許多測(cè)試計(jì)量場(chǎng)合中是十分必要的。分別從硬件和軟件兩方面給出了
2009-07-12 09:57:3413 詳細(xì)地介紹了有關(guān)鉑電阻的非線性特性提出三種線性化校正方法。
2009-07-18 15:47:1844 本文介紹了近幾年來利用ANN 可以任意精度逼近任意復(fù)雜的非線性函數(shù)的特性,所進(jìn)行的傳感器非線性靜態(tài)特性模型辨識(shí)的研究,分析了各種模型與算法的特點(diǎn)及應(yīng)用,提出了展望.
2009-09-03 09:09:198 非線性電阻Pspice模型的建立:提出一種基于Pspice 上新穎的非線性器件的仿真方法并以非線性電阻為例具體加以實(shí)現(xiàn)該模型是一個(gè)通用子電路模型并且可以應(yīng)用于任何電路仿真及電力半
2009-09-18 09:40:5377 采用函數(shù)鏈神經(jīng)網(wǎng)絡(luò)方法對(duì)振動(dòng)筒式壓力傳感器進(jìn)行非線性校正,與BP算法相比,函數(shù)鏈神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)明了、算法簡(jiǎn)單、易于收斂。文中介紹了函數(shù)鏈神經(jīng)網(wǎng)絡(luò)解決振動(dòng)筒式壓力傳感
2009-09-22 11:20:0214 基于T-S 模糊模型,提出了利用神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)非線性系統(tǒng)的辨識(shí)。首先,利用一種無監(jiān)督的聚類算法分析輸入輸出數(shù)據(jù)生成初始的結(jié)構(gòu)模型,確定系統(tǒng)的模糊空間和模糊規(guī)則數(shù),構(gòu)造神
2009-09-25 16:38:364 Pt100 溫度傳感器非線性的補(bǔ)償方法與電路實(shí)現(xiàn)
摘 要:針對(duì)鉑電阻(Pt100) 溫度傳感器輸出的非線性問題,結(jié)合其非線性的具體特點(diǎn)和船舶裝備的實(shí)際使用要求,提
2009-11-27 11:22:41165 激光焊接過程是典型的具有噪聲和擾動(dòng)影響的非線性系統(tǒng)。利用Hammerstein 模型的線性和非線性分離的特性可以建立起關(guān)于激光焊接過程的非線性模型,并以此為基礎(chǔ)得到非線性系
2009-12-22 14:09:2210 為了提高最小二乘支持向量機(jī)的魯棒性,介紹了加權(quán)最小二乘支持向量機(jī),給出了確定加權(quán)向量的一般方法。并介紹了基于貝葉斯框架的加權(quán)LS-SVM參數(shù)的優(yōu)化方法,利用它建立了
2010-01-09 14:02:009 針對(duì)傳感器網(wǎng)絡(luò)中節(jié)點(diǎn)采樣數(shù)據(jù)的空間和時(shí)間冗余特點(diǎn)以及節(jié)能要求,該文提出了一種基于一元線性回歸模型的空時(shí)數(shù)據(jù)壓縮算法ODLRST。ODLRST 先在每個(gè)節(jié)點(diǎn)內(nèi)進(jìn)行消除時(shí)間冗余的數(shù)
2010-03-06 11:46:2523 摘要:分析一種基于A/D轉(zhuǎn)換原理的非線性校正方法.這種方法從理論上能夠完全消除非線性誤差。文章以鉑電阻溫度傳感器的非線性校正為例.作了進(jìn)一步的說明,并給出了實(shí)用電
2010-05-17 09:22:1721 摘 要:提出了一種新的校正鉑電阻傳感器非線性輸出的數(shù)學(xué)方法--函數(shù)變換法,在討論校正傳感器非線性基本數(shù)學(xué)原理基礎(chǔ)上導(dǎo)出了線性化條件的解析式。為檢驗(yàn)理論的正確性,研究
2010-12-29 21:12:2910
傳感器非線性誤差的補(bǔ)償電路
2009-04-26 15:59:21 1034
1034 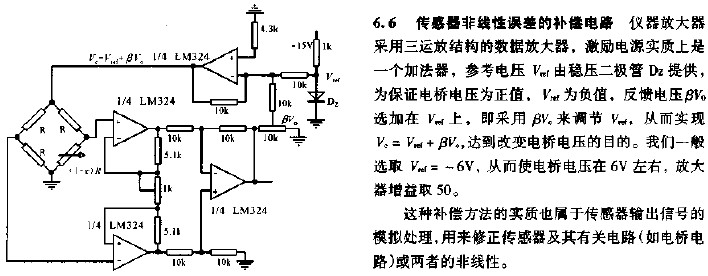
溫度傳感器非線性的補(bǔ)償電路實(shí)現(xiàn)
原理圖如下:
2009-11-21 15:39:37930 對(duì)于使用標(biāo)準(zhǔn)的Mamdani型模糊系統(tǒng)及正交投影參數(shù)調(diào)整算法進(jìn)行非線性系統(tǒng)辨識(shí),基于模糊模型參數(shù)的估計(jì)值收斂到其真實(shí)值所需的持續(xù)激勵(lì)條件,給出了適用于非線性移動(dòng)平均模型和二
2011-08-19 14:26:340 針對(duì)機(jī)載天線伺服機(jī)構(gòu)運(yùn)行時(shí)所受外力是快時(shí)變、變化范圍大、且自身摩擦等非線性特性不能忽略的問題,提出一種基于最小二乘支持向量機(jī)(LS-SVM)的自適應(yīng)控制設(shè)計(jì)方法。此方法將
2012-10-24 10:48:2932 由于模擬電路的多樣性、非線性和離散性等特點(diǎn),模擬電路的故障診斷呈現(xiàn)復(fù)雜、難以辨識(shí)等問題。針對(duì)已有方法的數(shù)據(jù)不平衡,提出了一種支持向量機(jī)集成的故障診斷方法。使用小波
2013-06-25 17:10:1423 一種開關(guān)磁阻電機(jī)模型參數(shù)的LS-SVM辨識(shí)方法
2016-01-20 17:28:110 基于多新息隨機(jī)梯度算法的網(wǎng)側(cè)變流器參數(shù)辨識(shí)方法研究_張敏
2017-01-02 15:24:0020 一種新型非線性時(shí)變模型_模糊變參數(shù)系統(tǒng)_張洪楊
2017-01-07 18:39:171 基于非線性磁鏈動(dòng)態(tài)模型的無速度傳感器矢量控制系統(tǒng)_劉和平
2017-01-08 13:38:530 基于LS_SVM的壓縮機(jī)防喘振非線性模型預(yù)測(cè)控制_金星
2017-01-31 15:22:440 基于Laguerre多項(xiàng)式的LVDT位移傳感器非線性校正_譚永宏
2017-03-19 19:08:352 電流模式帶有分段非線性校正帶隙參考
2017-10-17 11:34:5125 。 針對(duì)交通流量數(shù)據(jù)的非平穩(wěn)和非線性的特點(diǎn),文中結(jié)合EMD 和CPSO 算法對(duì)LS-SVM 核參數(shù)和懲罰系數(shù)進(jìn)行自適應(yīng)優(yōu)化,提出一種基于ECLS-SVM 算法的交通流量預(yù)測(cè)模型。通過EMD 提取交通流量的細(xì)節(jié)特征和趨勢(shì)特征,構(gòu)建出基于ECLS-SVM 的交通流
2017-10-31 15:38:102 入記憶多項(xiàng)式模型對(duì)MIMO發(fā)射端的非線性進(jìn)行建模,通過特殊設(shè)計(jì)的輸入序列,在不損失模型精確度的情況下降低了參數(shù)估計(jì)的復(fù)雜度。基于MIMO發(fā)射端的仿真結(jié)果表明,本文提出的方法比現(xiàn)有的CO-DPD性能更好,其能夠消除非線性串?dāng)_對(duì)預(yù)失真造成的影響,達(dá)到較好的預(yù)失
2017-11-10 15:02:3710 SVM可以做線性分類、非線性分類、線性回歸等,相比邏輯回歸、線性回歸、決策樹等模型。
2017-11-30 10:59:5582526 
針對(duì)基于遞推下降法的多輸出支持向量回歸算法在模型參數(shù)擬合過程中收斂速度慢、預(yù)測(cè)精度低的情況,使用一種基于秩2校正規(guī)則且具有二階收斂速度的修正擬牛頓算法( BFGS)進(jìn)行多輸出支持向量回歸算法的模型
2017-12-05 11:08:091 ( MR-SVM)態(tài)勢(shì)評(píng)估算法。該算法利用MapReduce并行計(jì)算模型,同時(shí)結(jié)合SVM可并行化的特點(diǎn),通過設(shè)計(jì)主要的map函數(shù)和reduce函數(shù),實(shí)現(xiàn)了SVM算法的并行化和主要參數(shù)的選取。在搭建的Hadoop平臺(tái)上對(duì)改進(jìn)算法與原算法進(jìn)行了比較驗(yàn)證:對(duì)于小規(guī)模樣本,改進(jìn)算法反而化
2017-12-26 17:52:110 基于SVM和模糊K均值算法的部位外觀模型。部位外觀模型由兩個(gè)分類器構(gòu)成,線性SVM分類器用于判斷部位定位狀態(tài)是否屬于人體部位,相似度分類器由部位定位狀態(tài)與利用模糊K均值算法確定的部位聚類中心的歸一化歐氏距離來構(gòu)造,用于計(jì)算
2018-01-08 15:13:400 本文提出了一種LCS和LS-SVM相結(jié)合的多機(jī)器人強(qiáng)化學(xué)習(xí)方法,LS-SVM獲得的最優(yōu)學(xué)習(xí)策略作為L(zhǎng)CS的初始規(guī)則集。LCS通過與環(huán)境的交互,能更快發(fā)現(xiàn)指導(dǎo)多機(jī)器人強(qiáng)化學(xué)習(xí)的規(guī)則,為強(qiáng)化學(xué)習(xí)系統(tǒng)
2018-01-09 14:43:490 基于Weierstrass逼近定理,闡釋了將一般非線性回歸模型近似為多項(xiàng)式模型來處理的數(shù)學(xué)原理,從而引入了把多元非線性回歸分析轉(zhuǎn)化為多元線性回歸分析的一般方法,并且通過實(shí)際應(yīng)用案例分析表明該方法的實(shí)用性和有效性。
2018-01-12 09:59:470 在表貼式永磁同步電機(jī)參數(shù)辨識(shí)中,逆變器的非線性因素會(huì)影響電機(jī)參數(shù)的辨識(shí)精度。該文通過方程變換去除定子電壓方程中逆變器非線性因素產(chǎn)生的誤差電壓,構(gòu)建不受逆變器非線性因素影響的參數(shù)辨識(shí)模型。為了提高辨識(shí)
2018-02-10 09:58:3323 提出了非線性頑健預(yù)編碼算法,該算法利用下行信道誤差的統(tǒng)計(jì)特性,重新設(shè)計(jì)了傳統(tǒng)非線性預(yù)編碼算法的前向矩陣、反饋矩陣以及縮放矩陣。計(jì)算機(jī)仿真表明當(dāng)存在下行信道誤差時(shí),該算法的性能不僅優(yōu)于傳統(tǒng)的線性
2022-03-07 15:23:380 間的關(guān)系,進(jìn)而設(shè)計(jì)相應(yīng)控制算法,并證明了系統(tǒng)的內(nèi)動(dòng)態(tài)穩(wěn)定性,實(shí)現(xiàn)了超級(jí)電容恒流充電與恒壓放電的控制目標(biāo)。在Matlab/Simulink仿真平臺(tái)中搭建仿真模型,對(duì)所提控制算法進(jìn)行驗(yàn)證,并在實(shí)驗(yàn)室中搭建實(shí)驗(yàn)電路,比較了非線性控制算法與PI算法
2018-03-20 16:36:271 本文檔的主要內(nèi)容詳細(xì)介紹的是matlab經(jīng)典算法數(shù)字實(shí)驗(yàn)教程之回歸分析主要內(nèi)容包括了:1.一元線性與非線性回歸分析,2.簡(jiǎn)介一元非線性回歸模型,3.MATLAB軟件實(shí)現(xiàn),4.一元回歸模型與回歸分析。
2019-01-03 11:46:4416 針對(duì)壓力傳感器輸出特性受溫度變化和電壓波動(dòng)影響的問題,提出了應(yīng)用支持向量機(jī)對(duì)壓力傳感器輸出特性進(jìn)行非線性補(bǔ)償?shù)?b class="flag-6" style="color: red">校正模型。校正模型利用支持向量機(jī)具有逼近任意非線性函數(shù)的特點(diǎn),通過建立壓力傳感器輸出特性
2021-03-24 11:34:319 現(xiàn)有的線性回歸方法不能有效處理噪聲和異常數(shù)據(jù)。針對(duì)這一問題,結(jié)合低秩表示和魯棒回歸方法構(gòu)建模型LR-RRM。利用低秩表示方法以有監(jiān)督的方式檢測(cè)數(shù)據(jù)內(nèi)的噪聲和異常值,從原始數(shù)據(jù)的低維子空間中恢復(fù)
2021-05-28 10:56:374 環(huán)節(jié),有效地避免了采用多碩式方法逼近非線性函毅的限制,拓寬了非線性模型的適用范圍;采用子空間算法估計(jì)采樣系統(tǒng)的狀態(tài)空間參教矩陣。最后,通過對(duì)兩個(gè)非線性 Hammerstein系統(tǒng)模型的仿真,驗(yàn)證了所提岀的辨識(shí)方法,既簡(jiǎn)化了辨識(shí)過程,對(duì)非線性
2021-05-31 14:32:5412 基于遺傳算法等的光伏陣列模型魯棒參數(shù)辨識(shí)
2021-06-29 16:23:3114 面向非線性動(dòng)態(tài)的保精度-稀疏特性核回歸模型
2021-07-02 15:00:473 MAX1452是一款高性能模擬信號(hào)調(diào)理器,已被廣泛接受,用于各種工業(yè)和汽車應(yīng)用。傳感器輸出非線性校正是某些應(yīng)用中的關(guān)鍵要求。雖然MAX1452尚未實(shí)現(xiàn)非線性校正,但只需在應(yīng)用電路中增加三個(gè)電阻即可實(shí)現(xiàn)。本應(yīng)用筆記介紹了這種電路,并提供了支持其有效性的數(shù)據(jù)。
2023-01-13 15:19:441490 
非線性自校正軟件。在應(yīng)用智能傳感器時(shí),非線性自校正軟件可以準(zhǔn)確處理智能傳感器的各項(xiàng)參數(shù)與電壓常數(shù)并通過相應(yīng)的算法進(jìn)行數(shù)據(jù)擬合。但是非線性自校正技術(shù)還不夠完善,需要加大技術(shù)研究力度。近年來,神經(jīng)網(wǎng)絡(luò)技術(shù)發(fā)展較快,技
2023-07-21 09:46:37618 測(cè)力傳感器的非線性指的是什么? 測(cè)力傳感器的非線性指的是在測(cè)量范圍內(nèi),傳感器輸出與輸入信號(hào)之間的關(guān)系不是完全線性的。這種非線性可能由多種因素引起,包括材料的非均勻性、溫度變化、機(jī)械結(jié)構(gòu)的偏差
2023-12-18 15:35:08347
 電子發(fā)燒友App
電子發(fā)燒友App












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論