 電子發燒友App
電子發燒友App


? ? 測試傳感器:MPU9250,九軸傳感器,其中有三個軸就是陀螺儀的三個方向角速度。
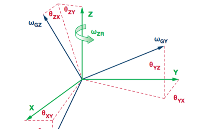
陀螺儀在每個采樣點獲得:采樣時刻(單位微妙),XYZ三個方向的角速度(單位弧度/秒),記為:wx, wy, wz。陀螺儀靜止時,wx, wy, wz也是有讀數的,這就是陀螺儀的零漂。
實驗一:將陀螺儀繞X軸旋轉時,只有wx有讀數;將陀螺儀繞Y軸旋轉時,只有wy有讀數;將陀螺儀繞Z軸旋轉時,只有wz有讀數;
實驗二:將陀螺儀繞XY面上的軸旋轉,wz讀數為零,即與旋轉軸垂直的軸上的角速度為零。
因為陀螺儀采樣率很高(1000Hz),通過瞬時讀數計算姿態,可以看做:先繞X軸旋轉,再繞Y軸旋轉,再繞Z軸旋轉。
下面這段代碼實現了一個簡單的陀螺儀姿態算法,開機并靜置幾十秒后,拿著陀螺儀旋轉,十幾分鐘內姿態是正確的,之后由于積分累積,誤差就越來越大了。
? ? ? ??// 參數說明:
// sampleTS? ?: 采樣時刻,單位:微秒
// wx, wy, wz :陀螺儀采樣,單位:弧度/秒
void GyroExperiment(uint64_t sampleTS, float wx, float wy, float wz)
{
? ? // 傳感器啟動時刻
? ? static uint64_t s_lastlog = 0;
? ? if(s_lasttime == 0){
? ? ? ? s_lasttime = sampleTS;
? ? ? ? s_lastlog = sampleTS;
? ? ? ? return;
? ? }
?
? ? // 采用啟動后5秒-35秒的采用平均值作為陀螺儀零漂
? ? // 在此期間,應保持陀螺儀靜止
? ? static float s_wx = 0, s_wy = 0, s_wz = 0;? ? // 陀螺儀零漂
? ? static uint64_t s_elapsed = 0;
? ? if(s_elapsed < 35000000){
? ? ? ? static int s_SampleCnt = 0;
? ? ? ? if(s_elapsed > 5000000){
? ? ? ? ? ? s_wx += (wx - s_wx) / (s_SampleCnt + 1);
? ? ? ? ? ? s_wy += (wy - s_wy) / (s_SampleCnt + 1);
? ? ? ? ? ? s_wz += (wz - s_wz) / (s_SampleCnt + 1);
? ? ? ? ? ? s_SampleCnt++;
? ? ? ? }
? ? ? ? s_elapsed += (sampleTS - s_lasttime);
? ? ? ? s_lasttime = sampleTS;
? ? }
?
? ? // 初始姿態,采用三個軸向量表示
? ? static float Xx=1,Xy=0,Xz=0;? ? // X軸
? ? static float Yx=0,Yy=1,Yz=0;? ? // Y軸
? ? static float Zx=0,Zy=0,Zz=1;? ? // Z軸
?
? ? // 根據陀螺儀讀數計算三個軸的旋轉量
? ? float interval = (sampleTS - s_lasttime) / 1e6;
? ? float rx = (wx - s_wx) * interval;
? ? float ry = (wy - s_wy) * interval;
? ? float rz = (wz - s_wz) * interval;
?
? ? // 分別構造繞三個軸旋轉的四元數
? ? float cos,sin;
? ? cos = cosf(rx/2); sin = sinf(rx/2); Quaternion qx(cos, Xx * sin, Xy * sin, Xz * sin);
? ? cos = cosf(ry/2); sin = sinf(ry/2); Quaternion qy(cos, Yx * sin, Yy * sin, Yz * sin);
? ? cos = cosf(rz/2); sin = sinf(rz/2); Quaternion qz(cos, Zx * sin, Zy * sin, Zz * sin);
?
? ? // 依次旋轉三個軸向量
? ? Quaternion q = qx*qz*qy; q.normalize(); Quaternion qi = q.inverse();
? ? Quaternion QX(0, Xx, Xy, Xz); QX = q*QX*qi; QX.normalize(); Xx = QX.q2; Xy = QX.q3; Xz = QX.q4;? ? ? ? // 旋轉X軸;
? ? Quaternion QY(0, Yx, Yy, Yz); QY = q*QY*qi; QY.normalize(); Yx = QY.q2; Yy = QY.q3; Yz = QY.q4;? ? ? ? // 旋轉Y軸;
? ? Quaternion QZ(0, Zx, Zy, Zz); QZ = q*QZ*qi; QZ.normalize(); Zx = QZ.q2; Zy = QZ.q3; Zz = QZ.q4;? ? ? ? // 旋轉Z軸;
?
? ? // 每1秒輸出一次姿態數據
? ? s_lasttime = sampleTS;
? ? if(sampleTS - s_lastlog > 1000000){
? ? ? ? console->printf("attitude: [%f, %f, %f]; [%f, %f, %f]; [%f, %f, %f]\n", Xx, Xy, Xz, Yx, Yy, Yz, Zx, Zy, Zz);
? ? ? ? s_lastlog = sampleTS;
? ? }
}













 工商網監
工商網監
評論